
Abstract
Deliberation is a standard procedure for making decisions in not too large groups. It has the advantage that group members can learn from each other and that, at the end, often a consensus emerges that everybody endorses. Unfortunately, however, implementing a deliberation procedure also has a number of disadvantages due to the cognitive limitations of the individual group members. What is more, the very process of deliberation introduces an additional bias, which we investigate in this article. We demonstrate that even in a group of (boundedly) rational agents the resulting consensus (if there is one) depends on the order in which the group members speak. More specifically, the group member who speaks first has an unproportionally high impact on the final decision, which we interpret as a new instance of the well-known anchoring effect. To show this, we construct and analyze an agent-based model—inspired by the disagreement debate in social epistemology—and obtain analytical results for homogeneous groups (i.e., for groups whose members consider each other as epistemic peers) as well as simulation results for inhomogeneous groups.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
There are numerous instances of group decision-making in our daily practice. For example, families have to decide on where to spend the summer holidays, funding agencies have to decide which research projects to support, expert panels have to decide which advice to give, and juries in courts have to decide whether a defendant is guilty or not. Sometimes a decision is made in the light of different preferences (and each group member wants to get the best out of it for herself), and sometimes all group members share the conviction that the resulting decision should be best in some sense that is commonly agreed upon. Juries in court, for example, aim at making the right decision: every jury member wants that a guilty defendant be convicted, and no one wants that an innocent defendant be sent to prison. Likewise, committees such as the Intergovernmental Panel on Climate Change (IPCC) deliberate to arrive at the best policy recommendations (see, e.g., Oreskes 2004).
Many real-life decisions are somewhere in between these two extremes: personal preferences play a role, but there is often also some overarching goal that all group members share. Decisions of funding agencies are a case in point. Here one wants, on the one hand, to fund the best researchers who have applied. On the other hand, some research topics are considered to be more important than others, and some research institutes are better suited than others. Here, the corresponding judgments may depend on personal preferences and biases.
But how should a group make a decision in a rational way? Which decision-making procedure is best? Consider a group whose members have conflicting preferences. For example, after discussing the issue for some time, three family members have the strong desire to spend the summer holidays at the seaside, while one family member wants to spend the holidays in the mountains. However, all family members agree on spending the holidays together. At this point it is unlikely that one of them will change her mind. And so the best procedure to arrive at a collective decision is to vote and do what the majority prefers.
In other cases, a deliberation procedure will be best. Let us assume that all group members agree on a common goal and that additional personal preferences are not meant to play a role. If, for example, all members of a jury in court want to make the right decision, then each of them will appreciate the opportunity to learn from the other jury members and possibly revise their judgments accordingly. The same holds for expert panels that give advice and make policy recommendations. It is well known, however, that a variety of biases show up in such decision-making procedures and that the resulting group verdict may be far from optimal (Sutherland and Burgman 2015). In a recent monograph, Burgman (2016) elaborates on this:
Strong personalities in groups influence outcomes. People defer to others they believe have greater authority or who appear confident, even when asked to make an independent estimate. Participants advocate positions, views are anchored and change is resisted. People hold covert opinions, and there is pressure to conform. Some analysts do not acknowledge these problems and continue as if group estimation is largely detached from subjective influences—even for circumstances as value-laden, uncertain and politically charged as assessing radioactive waste risks.
The traditional way of dealing with a group of experts is to herd the group into a room and ask, what do you think? The group mulls over the question in an unstructured way and forms a consensus. I term this ‘naive group judgement’.
This approach is perhaps the worst possible technique. It exposes participants to the countervailing pressures listed above. It leads to groupthink, a process in which arbitrary starting positions and the hidden agendas or prejudices of a few lead a group to a position that does not reflect the individual participants’ private opinions. (Burgman 2016, p. 122)
To get the best out of a group of experts, Burgman recommends structured procedures such as a modification of the Delphi method called the IDEA protocol. Here “IDEA” stands for “Investigate, Discuss, Estimate, Aggregate” and Burgman shows empirically that the procedure often leads to excellent results. And so, in the end, Burgman arrives at the optimistic conclusion that “all other things being equal, groups outperform individuals consistently and by a considerable margin” (Burgman 2016, p. 140).
This is of course not entirely surprising. There are many reasons, at least from a normative perspective, to believe that the collective decisions reached by deliberation will outperform individual ones. To name some, deliberation makes information more readily available to everyone, individual arguments and reasons are reviewed and scrutinized and so mistakes and fallacies are more easily recognized, and the availability of information makes it harder to manipulate the decision by controlling the flow of information (see, e.g., Cohen 1989a, b; Estlund 1993, 1994, 1997; Manin 1987; Marti 2006; Nino 1996). As Dryzek and List (2002) argue, deliberation also helps aligning the preferences of the decision makers (especially when they do share a common goal, like expert panels or juries), and creates single-peaked profiles that are easier to aggregate.
In joint work with Steele et al. (2007), Burgman also recommends the use of consensus models such as an extension of the well-known Lehrer–Wagner model (Lehrer and Wagner 1981; see also Regan et al. 2016). Such models facilitate a group consensus which, or so the authors argue (though without providing empirical evidence), makes all group members happy, as each of them endorses the decision of the group. However, the improved performance of structured procedures such as IDEA, even in theory, is highly contingent on the details of their implementation. What gives deliberation much of its support is the process of discussion, the exchange of arguments, and that the different group members can learn from each other. But this process, even in very simple and plausible implementations, may introduce biases that can, as we will show in this article, fully reverse the benefits, procedural or epistemic, that the deliberation procedure is considered to have.
To be more precise, any account of structured collective decision-making which can benefit from the advantages of deliberation has to take some of the details of the deliberative process into account. We will show that this includes some inevitable components which introduce biases. To see this, let us notice that models of deliberation and opinion pooling such as the Lehrer–Wagner model, although very efficient in generating a consensus, fall short of the spirit of the IDEA protocol unless one reduces the deliberation process to an iterated voting procedure.Footnote 1 These models abstract away the process in which the agents discuss, exchange arguments and revise their beliefs in light of what they learn from their fellow group members. In doing so, these models ignore some essential aspects of real deliberation processes.
This article focuses on one important example of this, to wit, the order in which the individual group members speak in the course of deliberation. Any account of deliberation that captures the exchange of opinions and arguments and incorporates the spirit of a debate will inevitably have to deal with the consecutive presentation of opinions and arguments. This, or so we shall argue, creates an important additional bias even if the individual groups members are (boundedly) rational in the way described in our model below. More specifically, the group member who speaks first often has an unproportionally high impact on the final decision: she anchors the deliberation. The resulting bias is not due to the cognitive limitations of the group members (which are well known to exist), but result from the structure of the procedure.Footnote 2 We show that this can fully offset both the procedural and the epistemic benefits of group deliberations.
Before we proceed, a disclaimer is in order: despite an intensive literature search, we could not find any established empirical evidence for the particular (structural) anchoring effect we are focusing on here. However, there is a wealth of anecdotal evidence for it, and in the management science literature, among others Bazerman (2002), Malhotra et al. (2015), Tuschke et al. (2014) and Zhu (2013) hint at the possible occurrence of the effect in the decision-making of boards of companies. We hope that the work presented here will kick off detailed empirical studies which will lead to a better understanding of the presumed effect.
The remainder of this article is organized as follows. Section 2 discusses two formal models of deliberation from the literature, on the basis of which our own model will be built. Section 3 presents our deliberation model, which will then, in Sect. 4, be used to study the anchoring effect in deliberations. Section 4.1 presents analytical results for the anchoring effect in homogeneous groups (i.e., groups whose members consider each other as epistemic peers) and Sect. 4.2 presents simulation results for inhomogeneous groups. Finally, Sect. 5 summarizes the main results of this article and points out some open problems and questions which should be addressed in future research.
2 Models of Deliberation
In this section, we consider two models of deliberation in more detail. It turns out that neither can be used directly to study the anchoring effect in deliberations. However, we will see below that the model we propose in the next section combines elements of both models.
We begin with the Lehrer–Wagner model of deliberation (Lehrer 1976; Lehrer and Wagner 1981). Consider a group of n members, ordered from 1 to n, that has to fix the value of a real-valued parameter x. Initially, each group member i submits an initial value \(\smash {x_{i\phantom {1}}^{(0)}}\) (with \(i=1,\ldots , n\)). Each group member i also assigns a normalized weight \(w_{ij}\) to each group member j (including herself). These weights sum up to 1, i.e.,
The weights reflect to what extent group member i takes the opinion of group member j into account. One can also think of them as group member i’s subjective estimates of the suitably normalized reliabilities of all group members. Now, each group member i updates her initial value \(\smash {x_{i\phantom {1}}^{(0)}}\) in the following way (“linear pooling”) to obtain the new value \(\smash {x_{i\phantom {1}}^{(1)}}\):
If we denote the vector of initial values by \(\vec {V}^{(0)} := \left( \smash {x_{1\phantom {1}}^{(0)}},\ldots , \smash {x_{n\phantom {1}}^{(0)}}\right) ^{\mathrm T}\), the vector with the updated values by \(\vec {V}^{(1)} := \left( \smash {x_{1\phantom {1}}^{(1)}},\ldots , \smash {x_{n\phantom {1}}^{(1)}}\right) ^{\mathrm T}\), and the weight matrix by \((\mathbf {W})_{ij} := w_{ij}\), then we can write Eq. (1) in a convenient matrix form:
Next, we iterate this process and obtain for deliberation round k:
Lehrer and Wagner (1981) have shown that this process converges if the matrix \(\mathbf {W}\) is connected. In this case, all entries in \(\lim _{k \rightarrow \infty } \vec {V}^{(k)}\) are identical and all group members agree on this consensual value. Here are three remarks about the Lehrer–Wagner model:
-
1.
In each round, all group members update at the same time. Hence the anchoring effect cannot be studied in this model.
-
2.
The weight matrix \(\mathbf {W}\) is not derived. It simply contains the weights each group member assigns to the members of the group. This is disturbing, as one might expect that the weights a rational group member assigns to all group members are based on an estimate of their true reliabilities.
-
3.
Lehrer and Wagner considered the model to be a model of rational consensus formation. Disagreement is impossible if the weight matrix is connected and the various group members do not assign, e.g., a weight of 1 to themselves. This requirement reflects the assumption that each group member is willing to learn from the other group members. As a result, dissent is impossible in a group of rational agents, which seems too strong, e.g., in situations of high uncertainty.
There are alternative models for the determination of a real-valued parameter by a group, including the Hegselmann–Krause model (or “bounded confidence model”; see Hegselmann and Krause 2002, 2006, 2009). This model has a number of interesting features. However, it uses a synchronic updating rule similar to Eq. (3) and can therefore not be used to study the anchoring effect either.
Let us now turn to a model of deliberation presented in Hartmann and Rafiee Rad (2018). This model considers a group of n members, ordered from 1 to n, who deliberate in a sequence of rounds to eventually agree upon the truth value of a certain propositional variable (e.g., guilty/not guilty). Each group member enters the deliberation process with a prior probability of the proposition in question and then votes for or against the proposition based on that probability. It is also assumed that each group member has a certain first-order reliability \(r_i \in (0, 1)\) to make the right decision as well as a second-order reliability \(\smash {c_{i\phantom {1}}^{(k)}} \in (0,1)\) which reflects how well group member i is able to estimate the first-order reliability of the other group members \(j \ne i\) in round k. Group members i with a high value of \(\smash {c_{i\phantom {1}}^{(k)}}\) give a more accurate assessment of the reliabilities \(r_j\) of the other group members in round k than group members with a low value of \(\smash {c_{i\phantom {1}}^{(k)}}\). More specifically, the model assumes that group member i estimates the reliability of a group member j in round k, denoted by \(\smash {r_{ij\phantom {1}}^{(k)}}\), by drawing from a uniform distributionFootnote 3 around the true value \(r_j\):
Thus, for \(\smash {c_{i\phantom {1}}^{(k)}} = 0\), the uniform distribution extends over the whole interval (0, 1). In this case group member i assigns a random reliability between 0 and 1 to group member j. Turning to the other extreme, for \(\smash {c_{i\phantom {1}}^{(k)}}=1\), we obtain \(\smash {r_{ij\phantom {1}}^{(k)}} = r_j\), i.e., group member i gives a gives a perfectly accurate assessment of the first-order reliability of group member j. Taking this into account, each group member updates her prior probability by conditioning on the votes of the other group members. (Clearly, the better a group member is in estimating the reliabilities of the other group members, the better her updated probability will be.) This process is then iterated over several rounds, assuming that the second-order reliabilities increase from round to round, reflecting the fact that one learns more and more about the reliability of the other group members in the course of deliberation, until a consensus is reached. If no consensus is reached after \(K_0\) rounds, then a majority vote decides.
Hartmann and Rafiee Rad (2018) use this Bayesian model to investigate the question under which conditions a deliberation process tracks the truth better than a simple voting procedure that is supported by the Condorcet Jury Theorem. This question does not concern us here. Neither shall we discuss alternative Bayesian models of deliberation, such as the Laputa model (see, e.g., Olsson 2011), as they are not relevant for the study of the anchoring effect in deliberations. However, we will use the idea of first- and second-order reliabilities in our model of the anchoring effect, to which we turn now.
3 A Model of the Anchoring Effect in Deliberations
Consider a group of n members, ordered from 1 to n, which has to fix the value of a real-valued parameter x. Each group member i enters the deliberation process with an initial value \(\smash {x_{i\phantom {1}}^{(0)}}\). These values are not announced publicly right away. As in the Hartmann–Rafiee Rad model discussed in the previous section, each group member i is characterized by two reliabilities:
-
1.
A first-order reliability \(r_i \in (0, 1)\) that measures how good group member i is in identifying the right value x.
-
2.
A second-order reliability \(\smash {c_{i\phantom {1}}^{(k)}} \in (0, 1)\) that measures how good group member i is in round k in estimating the first-order reliabilities of the other group members.
We present the details of our model in four steps.
-
1.
The Deliberation Procedure in a Nutshell The deliberation proceeds in a number of rounds. Each round consists of n steps. In round 1, step 1, group member 1 announces her assignment and provides reasons for it. Then all other group members update their assignments according to rational rules specified below, taking this new information into account. In step 2, group member 2 announces her assignment and provides reasons for it. Then all other group members update their assignments according to rational rules specified below, taking this new information into account. Here we assume that there are no personal biases. And so on until the end of round 1. Before round 2 starts, the second-order reliabilities \(\smash {c_{i\phantom {1}}^{(0)}}\) are increased. This takes into account that the group members get to know each other better in the course of the deliberation (e.g., by assessing the reasons the group members give for their assignments), which has the effect that their ability to assess the first-order reliabilities of the other group members improves.Footnote 4 In fact, we assume that the second-order reliabilities increase after every round until a maximum value \(C_i \le 1\) is reached after K rounds. Afterwards, \(\smash {c_{i\phantom {1}}^{(k)}}\) remains constant. We use the following formula:Footnote 5
$$\begin{aligned} \smash {c_{i\phantom {1}}^{(k)}} = {\left\{ \begin{array}{ll} \left( C_i - \smash {c_{i\phantom {1}}^{(0)}}\right) \cdot k/K + \smash {c_{i\phantom {1}}^{(0)}}, & \quad \text {if }\, 0 \le k \le K,\\ C_i, & \quad \text {if }\, k > K. \end{array}\right. } \end{aligned}$$(5)Note that updating the second-order reliabilities justifies that the deliberation process proceeds in several rounds. In each round, the group members learn something new about the reliabilities of their fellow group members. And this is why they keep on updating. However, it seems natural to stop the updating procedure after a finite number \(K_0 > K\) of rounds. Clearly, the value of \(K_0\) will depend on contextual factors such as how patient the individual group members are, how much time there is for the deliberation, etc. If no consensus is reached after \(K_0\) rounds, then the straight average of all assignments in the last round will be taken.
-
2.
Discrete First-Order Reliabilities While each group member i has a first-order reliability \(r_i \in (0, 1)\), we assume that the reliabilities that are actually used by the group members have discrete values. This simplifies the computations and is psychologically more plausible. (This assumption, which reflects the bounded rationality of the group members, will be relaxed later; see Figs. 8, 9.) More specifically, we assume that there are only three possible reliability values: H (‘High’), M (‘Medium’), and L (‘Low’). We furthermore assume that every group member i has perfect access to her own first-order reliabilityFootnote 6 and assigns herself a reliability of
-
H if \(r_i \ge 2/3\),
-
L if \(r_i \le 1/3\), and
-
M otherwise.
-
-
3.
Estimating the Discrete First-Order Reliabilities of Other Group Members Using the procedure described in the previous section, each group member i estimates the first-order reliability \(\smash {r_{ij\phantom {1}}^{(k)}}\) of the other agents in round k. This value is mapped onto H, M, or L as described above.
-
4.
The Updating Procedure After one group member has announced her assignment, all other group members update their original assignments and their own reliability assignment according to the following rules. The rules express group member i’s assignment of the value of the parameter \(\smash {x_{i\phantom {1}}^{(k+1)}}\) in round \(k+1\) in terms of her assignment in round k and the assignment of the person who speaks (\(= \hbox {group member}\; j\), a.k.a. the presenter) in round k. They are inspired by Elga’s (2007) contribution to the debate about rational disagreement in the literature on social epistemology. It is worth noting, however, that Elga’s conciliatory stance on disagreement is a matter of controversy in the literature on disagreement (see esp. Jehle and Fitelson 2009; Kelly 2010). Hence our choice is, at last to some extent, a convenient simplifying assumption, and we submit that more work needs to be done to substantiate it or to identify alternative individual updating procedures in the light of disagreement.
Presented in first-person perspective, the updating proceeds as follows:
-
(a)
I am H (or M, or L)Footnote 7 and the presenter is my epistemic peer, i.e., she is (on my estimation) also H (or M, or L, respectively). In this case, my new assignment is the straight average of her assignment and my original assignment:
$$\begin{aligned} \smash {x_{i\phantom {1}}^{(k+1)}} = \frac{1}{2}\left( \smash {x_{i\phantom {1}}^{(k)}} + \smash {x_{j\phantom {1}}^{(k)}}\right) . \end{aligned}$$My reliability value (i.e., the reliability value that I use in the next round to update my assessment) remains H (or M, or L, respectively).
-
(b)
I am H, the presenter is (on my estimation) L. In this case I disregard the opinion of the presenter and stick to my original assignment:
$$\begin{aligned} \smash {x_{i\phantom {1}}^{(k+1)}} = \smash {x_{i\phantom {1}}^{(k)}}. \end{aligned}$$My reliability remains H.
-
(c)
I am L, the presenter is (on my estimation) H. In this case I accept the opinion of the presenter:
$$\begin{aligned} \smash {x_{i\phantom {1}}^{(k+1)}} = \smash {x_{j\phantom {1}}^{(k)}}. \end{aligned}$$My reliability changes to H.
-
(d)
I am H (or M), the presenter is (on my estimation) M (or L, respectively). In this case, my new assignment is the weighted average of her and my original assignment:
$$\begin{aligned} \smash {x_{i\phantom {1}}^{(k+1)}} = \frac{1}{4}\left( 3 \, \smash {x_{i\phantom {1}}^{(k)}} + \smash {x_{j\phantom {1}}^{(k)}}\right) . \end{aligned}$$My reliability value remains H (or M, respectively).
-
(e)
I am L (or M), the presenter is (on my estimation) M (or H, respectively). In this case, my new assignment is the weighted average of her and my original assignment:
$$\begin{aligned} \smash {x_{i\phantom {1}}^{(k+1)}} = \frac{1}{4}\left( \smash {x_{i\phantom {1}}^{(k)}} + 3 \, \smash {x_{j\phantom {1}}^{(k)}}\right) . \end{aligned}$$My reliability value changes to M (or H, respectively).
Rule (a) expresses the Equal Weight View (Elga 2007). Rules (b) and (c) are inspired by Elga’s discussion of the guru case. Rules (d) and (e) use weights which reflect that the reliability assignments in question are one step apart from each other.
-
(a)
Before we present our results, we would like to make two remarks:
-
1.
Our model is closely related to the Lehrer–Wagner model. However, while the weight matrix \(\mathbf {W}\) used in the Lehrer–Wagner model contains the (subjective) weights each group member assigns to the members of the group, our model allows for the calculation of \(\mathbf {W}\) from assumptions about the deliberation procedure and assumptions about the individual updating method. To see this, note that the updating procedure in each step in a given round can be represented by a \(n \times n\) matrix. At the end of a round, n such matrices obtain (as every one of the n group members speaks in each round) and the resulting updating can be represented by the product of these n matrices (in the right order). At the end of round 1, this product is the Lehrer–Wagner weight matrix \(\mathbf {W}\) mentioned above [see Eqs. (2), (3)]. Note, though, that in our model the effective weight matrix of round 2 differs from the effective weight matrix of round 1, as the estimated reliabilities change from round to round. In our exposition of the Lehrer–Wagner model we assumed that the weight matrix \(\mathbf {W}\) does not change. However, such a change is easy to model: one simply has to replace \(\mathbf {W}^k\) by \(\mathbf {W}_k \cdots \mathbf {W}_2 \, \mathbf {W}_1\) in Eq. (3), where \(\mathbf {W}_i\) is the weight matrix of round i. For details and a discussion, see Lehrer and Wagner (1981).
-
2.
Our model assumes discrete reliability values. This is psychologically plausible and simplifies the computations. At the same time, using discrete reliabilities disregards valuable information. We will show below that the anchoring effect is a consequence of our model, but one may wonder whether the effect disappears if one instead considers agents who update on the basis of more fine-grained reliability brackets or who even update directly on the basis of the (estimated) real-valued reliabilities. Perhaps the effect is, after all, only the result of the fact that the group members are not fully rational. We will revisit this question at the end of Sect. 4.2.
4 Results
Let us now explore the consequences of our model. To do so, we study two types of groups separately: (1) In homogeneous groups, the different group members consider each other as epistemic peers. This case can be analyzed analytically and we will present several theorems in Sect. 4.1. (2) In inhomogeneous groups, different group members have different reliabilities. We will present the results of our computer simulations of this case in Sect. 4.2.
4.1 Homogeneous Groups
In a homogeneous group, all group members consider each other as epistemic peers and only Rule (a) from the previous section applies. Let \(\vec {V} := (x_1,\ldots , x_n)^{\mathrm T}\) be the vector of the assignments of the group members \(1,\ldots , n\) at some point in the deliberation process. Let us now assume that group member i speaks and all other group members update their assignments on that information. As all group members are epistemic peers, each group member’s new assignment is the straight average of her own previous assignment and the previous assignment of the speaker. Denoting the new vector by \(\vec {V'} := (x'_1,\ldots , x'_n)^{\mathrm T}\), this can be formally expressed as follows:
Here \(B^{i}_{n} := A^{i}_{n}+ I_{n}\), where \(A^{i}_{n}\) is an \(n \times n\) matrix with 1’s in the ith column and zeros elsewhere. \(I_{n}\) is the \(n \times n\) unit matrix.
Let us now denote the vector of initial assignments by \(\vec {V}^{(0)} := \left( \smash {x_{1\phantom {1}}^{(0)}},\ldots , \smash {x_{n\phantom {1}}^{(0)}}\right) ^{\mathrm T}\). The vector \(\vec {V}^{(1)}\) after one round of deliberation is then given by
with the weight matrix \(\mathbf {B}\). Note the formal analogy to Eq. (2). After k rounds of deliberation, we obtainFootnote 8
Building on the results of Lehrer and Wagner, we first show that the deliberation process converges.
Theorem 1
The deliberation process described above converges to a consensus.
Proof
It is easy to check by induction on k that \(\Pi _{i=1}^{k} B^{i}_{n}\) has exclusively positive entries in columns \(1,\ldots , k\). Hence \(\mathbf {B}\) only has positive entries. The theorem then follows from Theorem 7.1 in Lehrer and Wagner (1981), p. 130. \(\square \)
Next, we investigate the anchoring effect. To do so, we have to show that the first speaker gets a higher effective weight in the final weight matrix (\(\lim _{k \rightarrow \infty } \mathbf {B}^k\)) than all other speakers.Footnote 9 This is stated in the following theorem.
Theorem 2
In the consensus value reached by a homogeneous group through the process of deliberation described above, the opinion of the first speaker receives a higher weight than the opinion of any other group member. Moreover, the opinion of the ith speaker receives a higher weight than all subsequent speakers.
The proof is given in “Appendix 1”.
Finally, we show that Theorem 2 also holds for small deviations from the equal weight assignment. If the group members consider small deviations from the equal weights by assigning \((1-\epsilon )/2\) weight to the speaker and \((1+\epsilon )/2\) to themselves (for some small \(\epsilon \)), then the above updating procedure can be represented as before. In this case, the update will again be given by a matrix multiplication, replacing the matrices \(B^{i}_{n}\) by
where
We then obtain after one round of deliberation:
After k rounds of deliberation, the assignments are given by
The following theorem states our result:
Theorem 3
For a sufficiently small \(\epsilon \), the process of deliberation described above with weights set as \((1-\epsilon )/2\) and \((1+\epsilon )/2\) will converge to a consensus. That is, if
then \(\langle \vec {V} \rangle _{i} = \langle \vec {V} \rangle _{j}\)for \(i, j=1, \ldots , n\). Moreover, in the consensus the initial assignment of each speaker receives a higher weight than the initial assignment of all subsequent speakers.
The proof and some more details are given in “Appendix 2”.
4.2 Inhomogeneous Groups
Let us now turn to inhomogeneous groups, where the different group members have different first-order reliabilities. Here, each group member has to estimate the first-order reliabilities of the other group members to properly take their verdict into account. As it is not possible to obtain analytical solutions in such cases, we run computer simulations. The results will of course strongly depend on the distribution of reliabilities one starts with. We will study, for example, groups in which the first speaker has a lower first-order reliability than the rest of the group, as well as groups in which some members are more reliable and some members less reliable than the first speaker. Of course there will be reliability assignments for which the emergence or non-emergence of the anchoring effect is trivial. If the first speaker is highly reliable while the rest of the group has very low reliabilities then they will all simply adopt the assignment of the first speaker and the anchoring effect is inevitable. Similarly, the anchoring effect will not emerge if the first speaker has an extremely low reliability and the rest of the group members are all highly reliable. Thus the interesting cases are those groups where reliabilities of high, medium and/or low are mixed in such a way that a considerable part of the group will not abandon their own assignments in favor of that of the first speaker. It is in particular interesting to see the emergence of the anchoring effect in groups where a large portion of the group members have reliabilities higher than the first speaker (but not high enough to completely discard her opinion).
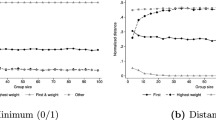
Let us now present the results of our simulations of the deliberation process for different groups. We compute the probability that the final consensus of the group is closest to the initial assignment of the first speaker (call this proposition A) and plot this probability as a function of the group size unless stated otherwise. We shall denote the same proposition for the middle and the last speaker by \(A^{\text {middle}}\) and \(A^{\text {last}}\), respectively. The second-order reliabilities are assumed to be the same for all group members. Notice that a second-order reliability of 0.8 implies that the estimation is made in intervals of length of at least 0.2. This means that the group members can possibly assign wrong reliability brackets to their fellow group members. The simulation algorithm and some more technical details are described in “Appendix 3”.
Figure 1 shows the anchoring effect for a group in which the first speaker has a reliability of 0.85 and the rest of the group have reliabilities of 0.75 and 0.4, equally distributed. So at least half of the group members have reliabilities close to that of the first speaker. Given the assignment of reliability brackets, the first speaker will on average be assigned high reliability (H), half of the group will be given reliabilities high or medium (H or M) and the other half will be given reliabilities M or L.

The probability of A as a function of the group size. The first speaker has a reliability of 0.85; the other group members have reliabilities of 0.75 and 0.4 (equally distributed)
Figure 2(i), (ii) shows the same group as in Fig. 1, where the group member with high reliability (0.85) is the middle speaker and the last speaker respectively. The plots in Fig. 2(i), (ii) shows the probability that the final consensus is closest to the original submission of this group member (the middle speaker and the last speaker, respectively).

The probability of \(A^{\text {middle}}\) and \(A^{\text {last}}\) as a function of the group size. (i) (lighter bars) The middle speaker has a reliability of 0.85; the other group members have reliabilities of 0.75 and 0.4 (equally distributed). (ii) (darker bars) The last speaker has a reliability of 0.85; the other group members have reliabilities of 0.75 and 0.4 (equally distributed)
Comparing Fig. 1 with Fig. 2(i), (ii) shows how the anchoring effect depends on the speaker’s position in the group. In particular, the comparison of the plots suggests that the anchoring effect depends more on the speaker’s position in the group than on her reliability, as the same member placed in the middle or at the end will result in a much smaller anchoring effect. To see this more clearly one can compare the anchoring effect for the first speaker in Fig. 1 with that of the middle and the last speaker in Fig. 3(i), (ii) respectively, where the middle and the last speakers have significantly higher reliabilities than the rest of the group.

The probability of \(A^{\text {middle}}\) and \(A^{\text {last}}\) as a function of the group size. (i) (lighter bars) The middle speaker has a reliability of 0.85; the other group members have reliabilities of 0.55 and 0.4 (equally distributed). (ii) (darker bars) The last speaker has a reliability of 0.85; the other group members have reliabilities of 0.55 and 0.4 (equally distributed)
Next we study how the first speaker’s reliability influences the anchoring effect. The first speaker in Fig. 1 has a higher reliability than the rest of the group. This, however, is not necessary for the anchoring effect; the effect emerges even when the first speaker is not particularly reliable in comparison with the other group members. Figure 4 shows the anchoring effect for two groups in which all [Fig. 4(i)] or a considerable number of group members [Fig. 4(ii)] have reliabilities higher than the first speaker.

The probability of A as a function of the group size. (i) (lighter bars) The first speaker has a reliability of 0.6; the other group members have reliabilities of 0.9. (ii) (darker bars) The first speaker has a reliability of 0.5; other group members have reliabilities of 0.9 and 0.7 (equally distributed)
Although the anchoring effect also shows up when the first speaker does not have a particularly high reliability, the comparison of Figs. 1 and 4 suggests a positive correlation between the reliability of the first speaker and the intensity of the anchoring effect, as one would expect. To see this more clearly, Fig. 5 shows the probability of A as a function of the first speaker’s reliability for a group of size 11 where the rest of the group members have reliabilities of 0.7 and 0.5.

The probability of A as a function of the first speaker’s reliability for a group of size 11. The other group members have reliabilities of 0.7 and 0.5 (equally distributed)
The next two graphs show the anchoring effect for two groups with random distributions of reliabilities. In Fig. 6, the reliabilities of the group members are coming from a uniform distribution over the interval (0, 1). In Fig. 7, the reliabilities are assigned through a \(\beta \)-distribution with parameters \(\alpha = \beta = 2\) over the interval (0, 1). In both cases the first speaker has a reliability of 0.5.

The probability of A as a function of the group size. The first speaker has a reliability of 0.5; the other group members have reliabilities randomly assigned from a uniform distribution

The probability of A as a function of the group size. The first speaker has a reliability of 0.5; the other group members have reliabilities randomly assigned from a \(\beta \)-distribution
So far our simulations have assumed that there are only three reliability brackets: H, M and L. One may wonder whether the anchoring effect is simply a consequence of this assumption, which models the group members as not fully rational. Fully rational agents will arguably take all available information (i.e., in the present case, their most precise assessment of the reliability of the other group members) into account. We will now investigate to what extent our results presented above change if the group members consider a higher number of reliability brackets.
The effect of increasing the number of reliability brackets depends on how the reliability of the first speaker compares to that of the majority of the group members. In general, and as one would expect, for groups where the first speaker is more reliable than the majority of the group members, increasing the number of reliability brackets increases the anchoring effect, while for groups with a less reliable first speaker, increasing the number of reliability brackets has the opposite effect of reducing the anchoring effect. However, our simulations suggest that for groups where the majority of group members have reliabilities close to that of the first speaker, increasing the number of reliability brackets does not make a significant difference, especially for larger groups. This is not all that surprising: If the other group members have reliabilities close to that of the first speaker, increasing the number of reliability brackets will still keep them in a reliability bracket that is the same or close to that of the first speaker. Thus, increasing the number of reliability brackets does not engender a significant change in the weights that the other group members assign to the first speaker. Figure 8a, b show the dependence of the anchoring effect on the number of reliability brackets for two such groups. The plots suggest that although changing the number of reliability brackets can influence the anchoring effect in these groups in both directions, the changes are small, and negligible for medium and large groups.

The probability of A as a function of the group size for different numbers of reliability brackets. a The first speaker has a reliability of 0.55; the other group members have reliabilities of 0.7 and 0.65 (equally distributed). b The first speaker has a reliability of 0.7; the other group members have reliabilities of 0.5 and 0.65 (equally distributed)
In contrast, when there is a significant difference between the reliability of the first speaker and those of the majority of the group members, increasing the number of reliability brackets makes a visible change to the anchoring effect. This will lead to a considerable increase of the anchoring effect when the first speaker is far more reliable than the majority, and to a decrease when she is significantly less reliable. See, for example, Fig. 9a, where the first speaker has a reliability of 0.85 and the rest of the group have reliabilities of 0.4 and 0.6. Notice that for this group, when we restrict ourselves to three reliability brackets, the first speaker will, on average, be estimated as highly reliable (H) and most of the other group members will, on average, be perceived as having a medium (M) reliability value; the opinions will be weighted accordingly. When we move to a higher number of reliability brackets, the first speaker will still be estimated as highly reliable, while at least half of the other group members will now be assigned a reliability value lower than medium; hence the first speaker will receive a higher relative weight. This will naturally increase the anchoring effect, as the plot shows. Figure 9b shows the reverse situation, where the first speaker has a reliability of 0.4 while the rest of the group have reliabilities of 0.6 and 0.85. As expected, increasing the number of reliability brackets will clearly reduce the anchoring effect. Notice, however, that in all these cases the anchoring effect persists; it is only the extent of the effect that changes with an increase in the number of reliability brackets. This supports the claim that the anchoring effect is indeed a result of the order in which the group members express their opinions, but that the extent of the anchoring effect can be influenced by the number of reliability brackets.

The probability of A as a function of group size for different numbers of reliability brackets. a The first speaker has a reliability of 0.85; the other group members have reliabilities of 0.4 and 0.6 (equally distributed). b The first speaker has a reliability of 0.4; the other group members have reliabilities of 0.6 and 0.85 (equally distributed)
Finally, we study the effect of second-order reliability on the anchoring effect.Footnote 10 A group member’s second-order reliability measures how good she is in assessing the (first-order) reliabilities of the other group members. We first note that changing the second-order reliability in an almost homogeneous group does not have much of an effect, as any effect will average out over several rounds and several runs of the simulation. However, if the first-order reliability of the first speaker differs significantly from those of the other group members, then a change of the second-order reliability will have a considerable effect, similar to changing the number of reliability brackets as discussed above: If the first speaker is significantly more reliable than the majority of the group members, increasing the second-order reliability will only make this difference more obvious to the other group members and hence result in the assignment of a higher weight to the first speaker by the other group members. This, in turn, makes the anchoring effect more pronounced. In contrast, if the first speaker is significantly less reliable than the majority of the other group members, increasing the second-order reliability will result in a lower weight assigned to the first speaker by the other group members. This, in turn, reduces the anchoring effect. Figure 10 illustrates this case. Here we consider a group of size 11 where the first speaker is highly reliable (reliability \(= 0.9\)), while the rest of the group has a rather low reliability of 0.3. We see that the anchoring effect increases with increasing second-order reliability.

The probability of A as a function of the second-order reliability for a group of size 11. The first speaker has a (first-order) reliability of 0.85; the other group members have (first-order) reliabilities of 0.3
5 Conclusions
It has been argued that group deliberation has both epistemic and procedural advantages compared to other collective decision-making procedures. An important issue in this regard, however, is that the advantages of deliberative decision-making depend strongly on the actual implementation of the process. We therefore argued that it is pertinent to take into account all aspects relevant to the implementation of the deliberation process if one wants to correctly judge the performance of the deliberative procedure (and if one wants to compare it to other group decision-making procedures). A problem that arises in this context is that the process of exchanging arguments and reasons, and the revision of individual opinions in light of what group members learn from their fellow group members, i.e., what grants a deliberative procedure much of its support, may also introduce unwanted biases. One example of such a bias is related to the fact that in real deliberations the different group members speak one after the other (at least if things are somehow organized) which may lead to an order-dependence of the resulting consensus (if a consensus emerges). It may happen that the first speaker anchors the deliberation and that she therefore has an unproportionally high impact on the final group decision.
“Anchoring” is an umbrella term referring to a wide range of biases where decision makers assign an unjustifiably high weight to certain pieces of (sometimes even irrelevant) information (see, e.g., Mussweiler et al. 2004). Different types of anchoring associated with both individual and collective decision-making have been investigated in the literature, mainly in terms of the cognitive limitations of the agents involved. In this article, we have suggested a new instance of the anchoring effect which results from the structure of the deliberation procedure and not from the cognitive limitations of the individual group members. To do so, we constructed a simple model of the deliberation procedure and assumed that the individual group members are (boundedly) rational, making sure that they are not prone to individual biases. We then showed that the unwanted anchoring effect emerges under a wide range of conditions, even if the first speaker is considered by the other group members to be not particularly reliable. This suggests that the effect will be even more pronounced if some of the idealizations of our model are removed. As a first step in this direction, we have relaxed the (perhaps psychologically realistic) assumption of considering only three reliability brackets and shown that the effect persists. But more work needs to be done in this direction. It is, however, fair to conclude that our results challenge the deliberative account of decision-making as well as some of the work that goes under the label “deliberative democracy”. To respond to our challenge, it has to be shown how pertinent aspects of the deliberation procedure (such as the exchange of arguments and reasons over time) can be taken into account without suffering from an order-dependence bias.
In future work, we plan to extend our studies in several directions. Here are three of them:
-
1.
Alternative models Our results might still be an artifact of the idealizations made in the proposed model. We do not think so, as the effect occurs for a wide range of parameters and is stable (though less pronounced) if the number of reliability brackets is increased. And yet, it will be important to study variants of the present model (imposing, e.g., also network structures) and to explore the possible occurrence of the anchoring effect in deliberations in alternative modeling frameworks such as a suitably modified Hegselmann–Krause model. (This model will also allow us to explore the possible influence of the anchoring effect on the phenomenon of opinion polarization.)
-
2.
Empirical studies It would be good to have detailed empirical studies that provide hard evidence for (and more details of) the anchoring effect in deliberations as explored in this paper. Do the predictions of our model hold in such experiments? Does, for example, the second speaker also have a considerable influence on the consensus that eventually emerges? Which role does the reliability of the group members play? And: How, if at all, does the anchoring effect differ in experiments in the lab and in field experiments with, say, boards of companies?
-
3.
Interventions It would be interesting to explore which constraints on (or designs of) the deliberation procedure may help preventing, or at least reduce, the anchoring effect in deliberations. This task could first be addressed in computer simulations, building on and extending the present model. Subsequently, laboratory experiments could be carried out on the basis of the simulation results to test them empirically.
Notes
Here we deviate from the model in Hartmann and Rafiee Rad (2018) by taking the estimations from a uniform distribution instead of a \(\beta \)-distribution.
Note that we do not model the process of giving reasons in detail. This would be the task of a more complex model. Instead, we focus on the epistemic effect of giving reasons, i.e., that the individual group members become better in assessing each other’s reliabilities. In this sense our model is effective or phenomenological. See Frigg and Hartmann (2006) for a discussion of the value of such models. See also the corresponding discussion in Hartmann and Rafiee Rad (2018). Eva and Hartmann (2018) show how argumentation can be modeled on the level of individual agents. It will be interesting to explore how these ideas can be applied and extended to model group argumentation in more detail.
It turns out that the results of our simulations, presented in Sect. 4.2, do not depend on the details of this formula. Other monotonically increasing functions of k lead to similar results. The linear dependence is chosen for reasons of simplicity.
This is a strong assumption, which can easily be relaxed. Indeed, psychological evidence suggests that people are not that good in assessing their own reliabilities (see Burgman 2016). Notice, however, that we only need to assume that each group member has access to her own reliability bracket (i.e., H, M, or L) as opposed to the exact value of her own first-order reliability, since only those are used in the computations.
For ease of writing, we assume that I (i.e., group member i) am one of the other group members, i.e., “I am H” is shorthand for “My reliability value is H” etc.
Note that the second-order reliabilities do not change here: the group members consider each other as epistemic peers during the whole deliberation process. Our discussion is therefore analogous to the original Lehrer–Wagner model where the weight matrix is the same in all deliberation rounds. This assumption is not uncontroversial (see, e.g., Hartmann et al. 2009 and references cited therein). Lehrer and Wagner (1981) have also relaxed this assumption and investigated the question under which conditions a consensus emerges nevertheless in their model. In the model considered in this section, the assumption allows us to derive some interesting analytical results. For results which do not rely on this assumption, see Sect. 4.2.
Arguably, also the last speaker has an important impact on the final decision. See, e.g., Mussweiler et al. (2004), p. 183. Analyzing this instance of the anchoring effect requires a model that differs from the model that we present in this article. We leave this for another occasion.
Note that we assume throughout this study that all group members have the same second-order reliability. This is an unrealistic assumption, but it is acceptable in the context of this paper as our main goal is to show that the (structural) anchoring effect can occur in deliberations.
References
Bazerman, M. (2002). Judgement in managerial decision making. Chichester: Wiley.
Burgman, M. (2016). Trusting judgments: How to get the best out of experts. Cambridge: Cambridge University Press.
Cohen, J. (1989a). Deliberation and democratic legitimacy. In A. Hamlin & P. Pettit (Eds.), The good polity: Normative analysis of the state (pp. 17–34). Oxford: Blackwell.
Cohen, J. (1989b). The economic basis of deliberative democracy. Social Philosophy and Policy, 6(2), 25–50.
Elga, A. (2007). Reflection and disagreement. Noûs, 41(3), 478–502.
Estlund, D. (1993). Who’s afraid of deliberative democracy? On the strategic/ deliberative dichotomy in recent constitutional jurisprudence. Texas Law Review, 71, 1437–1477.
Estlund, D. (1994). Opinion leaders, independence, and Condorcet’s jury theorem. Theory and Decision, 36(2), 131–162.
Estlund, D. (1997). Beyond fairness and deliberation: The epistemic dimension of democratic authority. In W. Bohman & J. Rehg (Eds.), Deliberative democracy: Essays on reason and politics (pp. 173–204). Cambridge, MA: MIT Press.
Eva, B., & Hartmann, S. (2018). Bayesian argumentation and the value of logical validity. Psychological Review, 125(5), 806–821.
Dryzek, J. S., & List, C. (2002). Social choice theory and deliberative democracy: A reconciliation. British Journal of Political Science, 33(1), 1–28.
Frigg, R., & Hartmann, S. (2006). Models in science. In The Stanford encyclopedia of philosophy (Spring 2006 Edition, revised for the Fall 2012 Edition).
Furnham, A., & Boo, H. C. (2011). A literature review of the anchoring effect. The Journal of Socio-Economics, 40(1), 35–42.
Hartmann, S., Martini, C., & Sprenger, J. (2009). Consensual decision-making among epistemic peers. Episteme, 6, 110–129.
Hartmann, S., & Rafiee Rad, S. (2018). Voting, deliberation, and truth. Synthese, 195, 1273–1293.
Hegselmann, R., & Krause, U. (2002). Opinion dynamics and bounded confidence: Models, analysis and simulation. Journal of Artificial Societies and Social Simulation, 5(3). http://jasss.soc.surrey.ac.uk/5/3/2.html
Hegselmann, R., & Krause, U. (2006). Truth and cognitive division of labour: First steps towards a computer aided social epistemology. Journal of Artificial Societies and Social Simulation, 9(3). http://jasss.soc.surrey.ac.uk/9/3/10.html
Hegselmann, R., & Krause, U. (2009). Deliberative exchange, truth, and cognitive division of labour: A low-resolution modeling approach. Episteme, 6, 130–144.
Jehle, D., & Fitelson, B. (2009). What is the equal weight view? Episteme, 6(3), 280–293.
Kelly, T. (2010). Peer Disagreement and higher order evidence. In R. Feldman & T. Warfield (Eds.), Disagreement (pp. 111–174). Oxford: Oxford University Press.
Lehrer, K. (1976). When rational disagreement is impossible. Noûs, 10, 327–332.
Lehrer, K., & Wagner, C. (1981). Rational consensus in science and society. Dordrecht: Reidel.
Malhotra, S., Zhu, P., & Reus, T. H. (2015). Anchoring on the acquisition premium decisions of others. Strategic Management Journal, 36(12), 1866–1876.
Manin, B. (1987). On legitimacy and political deliberation. Political Theory, 15(3), 338–368.
Marti, J. L. (2006). The epistemic conception of deliberative democracy defended. In S. Besson & J. Marti (Eds.), Deliberative democracy and its discontents (pp. 27–56). Burlington: Ashgate.
Mussweiler, T., Englich, B., & Strack, F. (2004). Anchoring effect. In R. F. Pohl (Ed.), Cognitive illusions: A handbook of fallacies and biases in thinking, judgement, and memory (pp. 183–196). Hove: Psychology Press.
Nino, C. S. (1996). The constitution of deliberative democracy. New Haven: Yale University Press.
Olsson, E. J. (2011). A Bayesian simulation model of group deliberation and polarization. In F. Zenker (Ed.), Bayesian argumentation (pp. 113–134). Berlin: Springer.
Oreskes, N. (2004). The scientific consensus on climate change. Science, 306(4), 1986.
Regan, H., Colyvan, M., & Markovchick-Nicholls, L. (2016). A formal model for consensus and negotiation in environmental management. Journal of Environmental Management, 80(2), 167–176.
Steele, K., Regan, H., Colyvan, M., & Burgman, M. (2007). Right decisions or happy decision-makers? Social epistemology: A journal of knowledge, culture and policy, 21, 349–368.
Sutherland, W., & Burgman, M. (2015). Use experts wisely. Nature, 526, 317–318.
Tuschke, A., Sanders, W. G., & Hernandez, E. (2014). Whose experience matters in the boardroom? The effects of experiential and vicarious learning on emerging market entry. Strategic Management Journal, 35(3), 398–418.
Zhu, D. (2013). Group polarization on corporate boards: Theory and evidence on board decisions about acquisition premiums. Strategic Management Journal, 34(7), 800–822.
Acknowledgements
Thanks to Mark Colyvan, Klaus Fiedler, Ulrike Hahn, Martin Kocher, Jan Sprenger and Anja Tuschke for helpful discussions and to the Alexander von Humboldt Foundation for financial support. We are particularly grateful for the excellent feedback of a referee which led to a new framing of this paper. Finally, S.H. would like to thank LMU Munich’s Center for Advanced Studies (CAS) for support through the Senior Researcher in Residence program in the academic year 2016/17.
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1: Proof of Theorem 2
We first prove the following lemma:
Lemma 1
For \(1 \le m \le n ,\)
where
\(\mathbf{0}\) is the \(m \times (n-m)\) zero matrix, \(I_{n-m}\) is the \((n-m) \times (n-m)\) identity matrix and
Proof
We prove the lemma by induction. For \(m=1\) the result is trivially true. Next, we suppose that it is true for \(m \ge 1\) and show that it also holds for \(m+1\).
This completes the proof of Lemma 1. \(\square \)
Corollary 1
The result of updating the assignments \(\vec {V}^{(0)}\) through one round of deliberation is given by
Proposition 1
Let
then the result of updating the assignments \(\vec {V}^{(0)}\) through k rounds of deliberation is given by
Proof
Let \(b_{i} := \sum _{j=1}^{n} \langle B\rangle _{ij}\). Notice that by Lemma 1, in matrix B all rows are equal, so \(b_{1} = b_{2}=\cdots = b_{n} = b\), where \(b := \sum _{i=1}^{n} 2^{-i}= 1- 2^{-n}\). Moreover, we have \(B^{k}= b^{k-1}B\). Hence,
which completes the proof. \(\square \)
Proof of Theorem 2
Let \(\vec {V}\) be the asymptotic result of the deliberation process and let \(w_{i}\) be the weight assigned to the ith speaker in the limit. By Proposition 1,
where \(d :=\lim _{k \rightarrow \infty } \sum _{t=1}^{k} \left( {\begin{array}{c}k\\ t\end{array}}\right) \frac{(2^{n}-1)^{t-1}}{(2^{n})^{k-1}}\). Then, by Proposition 1, the weight assigned to the ith speaker is given by \(w_{i} = d\cdot 2^{n-i}\). Hence, \(w_{1} \ge w_{2} \ge \cdots \ge w_{n}\). \(\square \)
Appendix 2: Stability Result
In this Appendix we will investigate the stability of our results for homogeneous groups by showing that the results still hold for small changes in the equal-weights assumption. Here the group members consider small deviations from the equal weights by assigning \((1- \epsilon )/2\) to the speaker and \((1+ \epsilon )/2\) to themselves. As before, after the ith group member speaks, everyone will update their assignment as a weighted average of their current value and that announced by the ith speaker while assigning a slightly higher/lower weight to themselves as opposed to the speaker. This process can again be represented by matrix multiplication as before by replacing the matrices \(B^{i}_{n}\) with
where
Thus, for example, in a group of size 3, the matrix
will be replaced by
With this, we obtain the following result after one round of deliberation:
Similarly, after k rounds of deliberation we shall have
We are now in a position to prove the corresponding versions of Lemma 1 for this setting.
Lemma 2
Let the \(A_{n}^{i}\) ’s be the matrices with 1 on the ith column and zero elsewhere and \(B_{n}^{j} = I_{n}+ A^{i}_{n}\) as before. Then
Proof
First notice that for all \(i,j=1, \ldots , n\) we have \(A_{n}^{i}\cdot A_{n}^{j} = A_{n}^{j}\). Hence,
From Lemma 1 we have
Thus
as required. \(\square \)
Next we consider a modified version of Proposition 1.
Proposition 2
Proof
Simplifying things further, we obtain:
as required. \(\square \)
Proof of Theorem 3
Notice that \(\frac{1}{2^{n}} \prod _{i=1}^{n} B^{i \prime }_{n}\) is essentially a weight matrix in the sense of the Lehrer–Wagner model and thus the convergence in the limit follows for the same reason as in the Lehrer–Wagner model. We will now show that the first speaker receives the highest weight in the final consensus. Let \(C_{n}:=\frac{1}{2^{n}}\prod _{i=1}^{n} B_{n}^{i}\) and \(\mathcal {O}^{\epsilon }_{n}:= O(\epsilon ^{2})/2^{n}\), then by Proposition 2 we have
Any term with \(n_{2} \ge 2\) or \(n_{3} \ge 2\) or \(n_{4} \ge 1\) includes a term of the order of \(O(\epsilon ^{2})\) and can thus be ignored. The same holds for terms with \(n_{2}=n_{3}=1\). Hence,
where \(d := \lim _{k \rightarrow \infty } \sum _{t=1}^{k} \left( {\begin{array}{c}k\\ t\end{array}}\right) \frac{(2^{n}-1)^{t-1}}{(2^{n})^{k-1}}\) and \(B = \frac{1}{2^{n}} \prod _{i=1}^{n} B^{i}_{n}- \frac{1}{2^{n}}I_{n}\) as in Theorem 2. Notice that B and \(\sum _{j=1}^{n} \frac{(j-2)}{2^{j}}A_{n}^{j}\) are both matrices with all rows equal, and thus
where the last equality is derived from Corollary 1. Thus
The weight assigned to the ith member will be the sum of the weights assigned to B and \(\sum _{j=1}^{n} \frac{(j-2)}{2^{j}} \, A_{n}^{j}\), that is,
For n large enough we have \(n \, \epsilon / 2^{n} \approx 0\), and hence \(w_{i}\) (i.e., the weight assigned to the ith speaker) will be
It is now easy to check that for \(\epsilon \le 1/2\) we have \(w_{1} \ge w_{i}\) for \(i=1, \ldots , n\). This means that the first speaker receives the highest weight. \(\square \)
Appendix 3: The Algorithm for the Simulation Procedure
The general sketch of the algorithm used for the simulation is as follows:
-
1.
First we set the relevant parameters. This includes the number of group members, n, the first-order reliabilities, \(r_i\), the initial second-order reliabilities, \(c_i\), as well as the maximum second-order reliabilities \(C_i\). We set the number of simulation runs to \(N = 10^5\) and limit the number of deliberation rounds to \(K=40\). Unless otherwise specified, we use the assignment \(c_i = 0.8\) and \(C_i = 0.9\) for all \(i=1, \ldots , n\).
-
2.
The simulation proceeds as follows:
-
(a)
Initialize the prior values assigned by the group members randomly.
-
(b)
Compute the estimated reliabilities \(r_{ij}\) from a uniform distribution around the value \(r_j\) using Eq. (4).
-
(c)
Calculate the estimated reliability brackets.
-
(d)
Start deliberation steps \(1,\ldots , n\): in step i update all assignments and reliability rankings based on the assignment of the ith member and her reliability.
-
(e)
If a consensus is reached, stop. If there is no consensus yet, repeat the deliberation steps \(1,\ldots , n\).
-
(f)
Repeat (e) at most K times.
-
(g)
If a consensus is reached, calculate the difference between the consensus value and the initial assignment for each group member.
-
(h)
Add 1 to a counter if the consensus is closest to the initial value assigned by the first group member. Do nothing otherwise.
-
(i)
After N runs, compute the probability that the consensus is closest to the initial assignment of the first group member.
-
(a)
Rights and permissions
About this article

Cite this article
Hartmann, S., Rafiee Rad, S. Anchoring in Deliberations. Erkenn 85, 1041–1069 (2020). https://doi.org/10.1007/s10670-018-0064-y
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10670-018-0064-y