
Abstract
The management of end-of-life vehicles conserves natural resources, provides economic benefits, and reduces water, air, and soil pollution. Sound management of end-of-life vehicles is vitally important worldwide thus requiring sophisticated decision-making tools for optimizing its efficiency and reducing system risk. This paper proposes an interval-parameter conditional value-at-risk two-stage stochastic programming model for management of end-of-life vehicles. A case study is conducted in order to demonstrate the usefulness of the developed model. The model is able to provide the trade-offs between the expected profit and system risk. It can effectively control risk at extremely disadvantageous availability levels of end-of-life vehicles. The formulated model can produce optimal solutions under predetermined decision-making risk preferences and confidence levels. It can simultaneously determine the optimal long-term allocation targets of end-of-life vehicles and reusable parts as well as capital investment, production planning, and logistics management decisions within a multi-period planning horizon. The proposed model can efficiently handle uncertainties expressed as interval values and probability distributions. It is able to provide valuable insights into the effects of uncertainties. Compared to the available models, the resulting solutions are far more robust.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
End-of-life vehicles (ELVs) are vehicles that have reached the end of their useful lives and are no longer registered or licensed for use [30]. ELVs are very important sources of economic value due to recyclable and reusable materials [15, 28]. However, they are classified as hazardous waste and have the potential for polluting the environment if they are not managed properly [51]. Therefore, the management of ELVs is not only profit-oriented, but also aimed at reducing health hazards [3, 51, 65]. In addition, the management of ELVs is significantly dependent on legislations, like Directive 2000/53/EC [21] in the European Union, Law on recycling of ELVs [43] in Japan, Technical policy for the recovery and utilization of automobile products [48] in China, Act on the resource circulation of electrical and electronic equipment and vehicles [42] in Korea, etc.
Systems for management of ELVs are typically aimed at collecting obsolete vehicles, isolating hazardous content, dismantling and selling reusable parts and components, and flattening and selling clean auto-bodies [33, 46]. Today, the management of ELVs has become the principal sustainability issue in most countries worldwide [1, 5, 6, 10, 15] and therefore requires sophisticated decision-making tools for optimizing its efficiency and reducing system risk.
Previously, a number of research works have been undertaken in the area of ELV management. Different modeling techniques have been used for solving recycling planning problems [12, 22, 34, 47, 61, 68,69,70,71,72, 92], dismantling planning problems [19, 28, 62, 76, 83, 89, 93], remanufacturing planning problems [7, 32, 37, 52, 53, 91], allocation problems [66, 67], and network design problems [9, 13, 18, 20, 24, 26, 27, 38, 40, 41, 45, 51, 54, 56, 75, 80, 88]. Several multi-criteria decision-making methods have been utilized for solving ELV management problems, including AHP [19, 89], PROMETHEE [62], fuzzy AHP [1, 2], fuzzy AHP-TOPSIS [57, 58], and fuzzy VIKOR [92]. Cost-benefit analysis has been used for solving recycling planning problems [12, 28, 61], dismantling planning problems [76, 83], and remanufacturing planning problems [7, 91]. The linear programming approach has been usually applied to solving recycling planning problems [34, 69,70,71]. A number of mixed integer linear programming studies were conducted for supporting recycling planning decisions [47] and network design [9, 18, 20, 27, 38, 40, 41, 45, 51, 80, 88]. The interval-parameter programming has previously been coupled with the two-stage stochastic programming [66], multi-stage stochastic programming [67], and chance-constrained programming [68]. In addition, there are several studies that utilized simulation approach [22, 24, 29], Bayesian probabilistic approach [52, 53], game theory [13], nonlinear mixed integer programming [93], quadratic programming [32], bilevel mixed integer linear programming [75], fuzzy mixed integer programming [56], and lexicographic mixed integer goal programming [26].
The review of previous literature evidently shows that a number of system analysis methods have been developed for solving various ELV management problems. However, the available methods cannot adequately control the risk in systems for management of ELVs. As a result, their solutions can lead to great financial losses if an extremely disadvantageous supply event occurs. Therefore, effective risk measures should be integrated into modeling frameworks to secure the avoidance of such erroneous decisions. A risk measurement method which can efficiently tackle the above shortcoming and capture the notion of risk is Conditional value-at-risk (CVaR) [23, 59, 60, 78, 79]. It is a new method that can effectively quantify risks based on random probability distribution. Its superior properties [25, 39, 50, 55] as well as versatility for incorporation into various optimization models [4, 44, 86, 87] are important prerequisites of successful utilization for solving complex ELV management problems. Therefore, in order to fill the identified gap in the literature, this study presents an interval-parameter CVaR two-stage stochastic programming model for management of ELVs. A case study is conducted to illustrate the potentials and applicability of the developed model.
Since, the interval-parameter CVaR two-stage stochastic programming approach represents novel methodology, only a small number of research papers have been carried out. More detailed, it has been used for water allocation [35, 36, 64, 81, 84, 90], electric system planning [31], municipal waste management [16], and air quality management [17]. This research presents the first attempt to develop an interval-parameter CVaR two-stage stochastic programming model for management of some end-of-life product. Moreover, this research presents the first investigation that considers the risk control of systems for management of ELVs under real-life highly variable supply conditions. The formulated model not only clearly extends the field of application of the interval-parameter CVaR two-stage stochastic programming approach, but also provides an important and contemporary tool for waste managers.
The remaining part of the paper is organized as follows: Section 2 describes the considered ELV management problem and presents the interval-parameter CVaR two-stage stochastic programming model for management of ELVs. Section 3 presents case study results and discussions. Section 4 presents conclusions of the work.
2 Materials and Methods
2.1 Statement of the Problem
Consider a system for management of ELVs shown in Fig. 1. Professional, private, and public entities which own ELVs (hereafter collectively called vehicle users) are required to deliver them to the nearest collection center. Vehicle users are physically and financially responsible for the transportation of ELVs to the collection centers. The collection centers are the storage facility providers, i.e., they accept and temporarily accumulate ELVs disposed by the vehicle users. ELVs from the collection centers are transported to the authorized treatment facilities. The authorized treatment facilities are required to depollute ELVs received from the collection centers. Depolluting of ELVs is mandatory to avoid metals and equipment contamination. In the depolluting step, the authorized treatment facilities remove fuel, motor oil, oil from transmission system, hydraulic oil, cooling liquid, liquid from the brake system, and other noxious substances that are prohibited in landfills. The extracted liquids are firstly stored in tanks and later transported to the specialized recovery facilities for treatment (e.g., energy recovery of heavy residues, cleaning of waste oil, etc.). The next operation is the dismantling. In this operation, reusable parts and components with market value (e.g., door panels, driving mirrors, lights, engines, gearboxes, etc.) are stripped from depolluted ELVs and stored in the authorized treatment facilities. Reusable parts and components are sold at the used parts market, comprised of numerous dealers of reusable parts (Fig. 1). In order to reduce the cost of transporting ELVs to the vehicle recycling factories, a heavy duty baling machine, which uses strong hydraulic pressure, is used to flatten depolluted and dismantled ELVs in the authorized treatment facilities. When collected quantities of ELVs are extremely unfavorable, to avoid cessation of the vehicle recycling factories as well as closure of the used parts market, certain quantities of depolluted, dismantled, and flattened ELVs are purchased at the international secondary metal market and delivered to the import centers. Finally, depolluted, dismantled, and flattened ELVs are transported and sold to the vehicle recycling factories, for separation of the various metallic fractions and partial recycling of generated automobile shredder residue.

Material flow network in a system for management of end-of-life vehicles
The system for management of ELVs (Fig. 1) is a complex waste management system with many of its components being uncertain. The quantities of ELVs delivered by vehicle users to collection points located in a certain geographic area arise as a direct consequence of vehicle fleet population, the average age and lifetime of vehicles, motorization rate, existence of road taxes for old vehicles, etc. Since all these influential factors have stochastic characteristics, this major input modeling parameter should be expressed as a random variable. Hence, the ELV availability levels are random variables with known probabilities. However, allocation targets of depolluted, dismantled, and flattened ELVs as well as allocation targets of reusable parts and components have to be decided before the actual realization of ELV supply events, i.e., they represent the first stage decision variables. If the guaranteed quantities of ELVs and reusable parts cannot be allocated to the vehicle recycling factories and dealers respectively, due to insufficient number of collected ELVs, the ELV management system is under obligation to pay certain penalties. When the ELV availability levels are known, a second stage decision has to be made in order to correct the previously promulgated allocation targets and minimize the penalties. Two-stage stochastic programming is effective for dealing with random variables and making decisions in a two-stage fashion.
In the considered ELV management problem, uncertainties also exist with economic parameters. The costs of transportation of numerous material flows between network entities are influenced by various factors including gas prices, truck driver wages, etc. The costs of depolluting, dismantling, and flattening operations are uncertain in reality, because they can vary with operator wages, electricity prices, equipment maintenance expenses, and needed resources (e.g., fluid suction gun, fuel removal station, working area, etc.). Revenue from selling depolluted, dismantled, and flattened ELVs to the vehicle recycling factories as well as revenue from selling reusable parts and components to the dealers are affected by a number of factors. For instance, the first one is primarily influenced by the quality of ELV and the situation on the (secondary) metal markets. Penalties for the ELV management system are in line with the lost profit of the vehicle recycling factories and dealers of reusable parts due to resource shortages. The cost of hazardous substances treatment in the specialized recovery facilities is subject to continuous change. On the other hand, technical data is also clouded by uncertainty. The share of hazardous substances as well as the share of reusable parts and components in collected ELVs vary spatially and temporally, and should not be considered as deterministic. For instance, the latter one depends on a large number of factors including the following: vehicle age and mileage, ELV type (i.e., natural or premature, due to accident, fire or flood), maintenance and utilization level, etc. Operational capacities of the authorized treatment facilities depend on the working and equipment conditions, level of process automation, existence of serial processing lines, material flow composition, etc. Presenting the abovementioned modeling parameters as interval numbers is purely natural. However, when economic and technical parameters are presented as interval values, interval-parameter programming should be incorporated into the two-stage stochastic programming approach to quantify this type of uncertainty.
The interval-parameter two-stage interval-stochastic programming approach does not consider risk control issues while solving the described ELV management problem. As a result, when the ELV availability levels are extremely unfavorable, its solutions could lead to severe shortages of depolluted, dismantled, and flattened ELVs for the vehicle recycling factories as well as reusable parts and components for the dealers. In addition, the solutions become inappropriate when the decision maker is risk-averse as well as infeasible under highly variable supply conditions [31, 81]. Therefore, it is strongly desired that the risk control is integrated in the waste management program. A risk measurement method which can efficiently tackle the above shortcomings and capture the notion of risk is the CVaR method [17, 86]. Therefore, the addressed problem can be presented as an interval-parameter CVaR two-stage stochastic programming model for management of ELVs. The interval-parameter CVaR two-stage stochastic programming represents an appropriate solution methodology, since it is necessitated by the studied problem itself.
2.2 Interval-Parameter Programming Approach
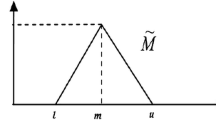
A general interval-parameter programming model can be defined as follows [77, 94]:
subject to:
where ± represents the crisp interval number with known upper bound “+” and lower bound “−”, but unknown distribution information; f± is objective function; C± ∈ {R±}1 × n, A± ∈ {R±}m × n, B ∈ {R±}m × 1, X± ∈ {R±}n × 1 (R± denotes a set of interval numbers).
Model (1) can be decomposed into two sub-models corresponding to the upper and lower bounds of the objective function, f+ and f−, respectively, and solved by using the Best worst case method [14, 77].
2.3 Interval-Parameter Two-Stage Stochastic Programming Approach
One potential approach to better account for uncertainties expressed as interval numbers and probability distributions is to integrate the interval-parameter programming and two-stage stochastic programming within a general optimization framework. A general interval-parameter two-stage stochastic programming model can be defined as follows [85]:
subject to:
where \( {C}_{T_1}^{\pm}\in {\left\{{R}^{\pm}\right\}}^{1\times {n}_1} \), \( {D}_{T_2}^{\pm}\in {\left\{{R}^{\pm}\right\}}^{1\times {n}_2} \), \( {A}_t^{\pm}\in {\left\{{R}^{\pm}\right\}}^{m_2\times {n}_1} \), \( {A}_t^{\hbox{'}\pm}\in {\left\{{R}^{\pm}\right\}}^{m_2\times {n}_2} \), \( {A}_r^{\pm}\in {\left\{{R}^{\pm}\right\}}^{m_1\times {n}_1} \), \( {B}_r^{\pm}\in {\left\{{R}^{\pm}\right\}}^{m_1\times 1} \), \( {X}^{\pm}\in {\left\{{R}^{\pm}\right\}}^{n_1\times 1} \), \( {Y}^{\pm}\in {\left\{{R}^{\pm}\right\}}^{n_2\times 1} \); \( {x}_j^{\pm } \) is the first stage decision made before the random variable is observed; \( {\omega}_s^{\pm } \) is the random variable which takes discrete values with a probability level probs, where s ∈ S, probs > 0, and \( \sum \limits_{s\in \mathrm{S}} pro{b}_s=1; \)\( {y}_{js}^{\pm } \) is the second stage decision variable, which depends on the realization of the random variable \( {\omega}_s^{\pm } \).
2.4 Interval-Parameter CVaR Two-Stage Stochastic Programming Approach
One of the popular techniques for evaluating the risk is the Value-at-Risk (VaR) method. The VaR, also known as quantile, is widely employed as a measure of risk [31, 35]. However, the VaR cannot be easily applied to non-normal distribution and may become unstable [44]. It is biased toward optimism rather than conservatism and does not provide any information about the severity of a loss when it is exceeded [59, 60, 74, 82]. Its significant deficiencies are also lack of consistency [8] and convexity [11].
For a given time horizon and the confidence level α (where α∈[0, 1]), VaR is defined as the loss over the time horizon that is exceeded with probability 1 − α:
where Fz(η) represents cumulative distribution function of a set of random variables Z.
The CVaR [59, 60, 78, 79], also called mean excess loss or expected shortfall, is a modified form of the VaR method. This novel risk measurement method is coherent [8, 55] as well as consistent with the second (or higher) order stochastic dominance [50]. Thus, minimizing the CVaR never conflicts with maximizing the expectation of any risk-averse utility function. Moreover, the lower partiality of the CVaR plays an important role in preserving the concavity of the profit [25] thus always providing a unique well-behaved optimum [39]. A general CVaR two-stage stochastic programming model can be defined as follows [31, 35, 49]:
where f(x, ω) is expected cost function; Q(x, ω) is a continuous loss function; x is decision vector; ω is random vector with its probability distribution p(⋅); λ is a non-negative weight specified by decision makers to trade-off expected cost with risk; CVaRα is the conditional value-at-risk at level α.
The CVaR is defined as the conditional expectation of the loss exceeding or equal to VaR for the time horizon and the confidence level [59, 60, 78, 79]:
The CVaR can be expressed by the following linear minimization formula, which is computationally more tractable [63, 73, 74]:
where [Z(x, ω) − η]+ = max[0, Z(x, ω) − η].
Thus, a general interval-parameter CVaR two-stage stochastic programming model can be formulated as follows:
subject to:
2.5 Modeling Formulation
Based on the interval-parameter programming and two-stage stochastic programming approaches as well as the CVaR method, the interval-parameter CVaR two-stage stochastic programming model for management of ELVs can be formulated as follows:
Revenue from allocating depolluted, dismantled, and flattened ELVs to the vehicle recycling factories:
Revenue from allocating reusable parts and components to the dealers:
Penalty for violating allocation targets of depolluted, dismantled, and flattened ELVs:
Penalty for violating allocation targets of dismantled reusable parts and components:
Cost of importing depolluted, dismantled, and flattened ELVs from the international secondary metal market:
Cost of depolluting ELVs in the authorized treatment facilities:
Cost of dismantling reusable parts and components in the authorized treatment facilities:
Cost of flattening depolluted and dismantled ELVs in the authorized treatment facilities:
Cost of hazardous substances treatment in the specialized recovery facilities:
Cost of transporting ELVs from the collection centers to the authorized treatment facilities:
Cost of transporting hazardous substances from the authorized treatment facilities to the specialized recovery facilities:
Cost of transporting reusable parts and components from the authorized treatment facilities to the dealers:
Cost of transporting depolluted, dismantled, and flattened ELVs from the authorized treatment facilities to the vehicle recycling factories:
Cost of transporting depolluted, dismantled, and flattened ELVs from the import centers to the vehicle recycling factories:
Cost of inventory storage of ELVs in the collection centers:
Cost of inventory storage of hazardous substances in the authorized treatment facilities:
Cost of inventory storage of reusable parts and components in the authorized treatment facilities:
Cost of inventory storage of depolluted, dismantled, and flattened ELVs in the authorized treatment facilities:
Cost of inventory storage of depolluted, dismantled, and flattened ELVs in the import centers:
CVaR value for selected weighting factor and defined confidence level:
subject to:
Risk-aversion constraints:
Initial inventories of ELVs in the collection centers:
Material flow balances of ELV flows in the collection centers:
Operational capacities of the authorized treatment facilities:
Quantities of depolluted ELV flows in the authorized treatment facilities:
Quantities of hazardous substances removed from ELV flows in the authorized treatment facilities:
Initial inventories of hazardous substances in the authorized treatment facilities:
Capacities of tanks for storing hazardous substances in the authorized treatment facilities:
Material flow balances of hazardous substances in the authorized treatment facilities:
Quantities of reusable parts and components in the authorized treatment facilities:
Quantities of depolluted and dismantled ELV flows in the authorized treatment facilities:
Initial inventories of reusable parts and components in the authorized treatment facilities:
Capacities of storages for reusable parts and components in the authorized treatment facilities:
Material flow balances of reusable parts and components in the authorized treatment facilities:
Demand of the dealers for reusable part and components:
Initial inventories of depolluted, dismantled, and flattened ELVs in the authorized treatment facilities:
Capacities of storage areas for depolluted, dismantled, and flattened ELVs in the authorized treatment facilities:
Material flow balances of depolluted, dismantled, and flattened ELV flows in the authorized treatment facilities:
Initial inventories of depolluted, dismantled, and flattened ELVs in the import centers:
Capacities of storage areas for depolluted, dismantled, and flattened ELVs in the import centers:
Material flow balances of depolluted, dismantled, and flattened ELV flows in the import centers:
Demand of the vehicle recycling factories for depolluted, dismantled, and flattened ELVs:
Measures to avoid cessation of the vehicle recycling factories:
Import expenses constraints:
Technical constraints:
The detailed nomenclatures for the indices and sets, parameters, and variables are provided in the Appendix. In Model (8), the objective function (8.a) seeks to maximize the expected profit of the system for management of ELVs over the multi-period planning horizon. The components of the objective function (8.a) are defined in Eqs. (8.a.1)–(8.a.20). Equation (8.a.1) calculates the revenue of the system for management of ELVs from allocating depolluted, dismantled, and flattened ELVs to the vehicle recycling factories. Equation (8.a.2) computes the revenue of the system from allocating reusable parts and components to the available dealers. Equations (8.a.3)–(8.a.4) define the recourse expenses caused by payment of penalties for resource shortages. Equation (8.a.3) represents the total penalty for violating allocation targets of depolluted, dismantled, and flattened ELVs for the vehicle recycling factories, while Eq. (8.a.4) presents the total penalty for violating allocation targets of dismantled reusable parts and components for the dealers. Equation (8.a.5) relates to the cost of importing depolluted, dismantled, and flattened ELVs from the international secondary metal market. Equation (8.a.6) computes the cost of depolluting ELVs in the authorized treatment facilities. Equation (8.a.7) calculates the cost of dismantling reusable parts and components from depolluted ELVs in the authorized treatment facilities. Equation (8.a.8) defines the cost of flattening depolluted and dismantled ELVs in the authorized treatment facilities. Equation (8.a.9) presents the cost of hazardous substances treatment in the specialized recovery facilities. Equations (8.a.10)–(8.a.14) define the cost of transporting numerous material flows between various network entities of the system for management of ELVs. More detailed, Eq. (8.a.10) represents the cost of transporting ELVs from the collection centers to the authorized treatment facilities. Equation (8.a.11) calculates the cost of transporting hazardous substances from the authorized treatment facilities to the specialized recovery facilities. Equation (8.a.12) defines the cost of transporting dismantled reusable parts and components from the authorized treatment facilities to the available dealers. Equation (8.a.13) computes the cost of transporting depolluted, dismantled, and flattened ELVs from the authorized treatment facilities to the vehicle recycling factories. Equation (8.a.14) presents the cost of transporting depolluted, dismantled, and flattened ELVs from the import centers to the vehicle recycling factories. Equations (8.a.15)–(8.a.19) present the inventory holding cost of numerous material flows. More detailed, Eq. (8.a.15) computes the cost of inventory storage of ELVs piled up in the collection centers. Equation (8.a.16) calculates the cost of inventory storage of hazardous substances in tanks of the authorized treatment facilities. Equation (8.a.17) relates to the cost of inventory storage of reusable parts and components dismantled from depolluted ELVs in the authorized treatment facilities. Equation (8.a.18) defines the cost of inventory storage of depolluted, dismantled, and flattened ELVs piled up in the authorized treatment facilities. Equation (8.a.19) represents the cost of inventory storage of depolluted, dismantled, and flattened ELVs piled up in the import centers. Finally, Eq. (8.a.20) computes the conditional value-at-risk under risk parameters α and λ.
Constraints (8.b) are risk-aversion constraints, which are necessary due to introduction of auxiliary variables for computing the CVaR values. Constraints (8.c) initialize inventories of ELVs in the collection centers. Constraints (8.d) enforce the inventory balances of ELVs in the collection centers. Constraints (8.e) represent the operational capacities of the authorized treatment facilities. Constraints (8.f)–(8.g) maintain material flow balances of depolluting processes in the authorized treatment facilities. More detailed, constraints (8.f) determine quantities of depolluted ELV flows, while constraints (8.g) determine quantities of hazardous substances removed from ELV flows in these network entities. Constraints (8.h) initialize inventories of hazardous substances in storage tanks of the authorized treatment facilities. Constraints (8.i) represent the capacities of tanks for storing hazardous substances in the authorized treatment facilities. Constraints (8.j) enforce the inventory balances of hazardous substances removed from ELV flows in the authorized treatment facilities. Constraints (8.k)–(8.l) maintain material flow balances of the dismantling processes in the authorized treatment facilities. More detailed, constraints (8.k) determine quantities of reusable parts and components with market value dismantled from depolluted ELV flows, while constraints (8.l) determine quantities of depolluted and dismantled ELV flows. Constraints (8.m) initialize inventories of reusable parts and components stored in the authorized treatment facilities. Constraints (8.n) are capacity constraints of storages for reusable parts and components in the authorized treatment facilities. Constraints (8.o) enforce the inventory balances of reusable parts and components dismantled from depolluted ELV flows in the authorized treatment facilities. Constraints (8.p) represent the dealers’ demands for reusable part and components. Constraints (8.q) initialize inventories of depolluted, dismantled, and flattened ELVs in the authorized treatment facilities. Constraints (8.r) represent capacities of storage areas for depolluted, dismantled, and flattened ELVs in the authorized treatment facilities. Constraints (8.s) enforce the inventory balances of depolluted, dismantled, and flattened ELV flows in the authorized treatment facilities. Constraints (8.t) initialize inventories of depolluted, dismantled, and flattened ELVs in the import centers. Constraints (8.u) are storage capacity constraints of the import centers. Constraints (8.v) enforce the inventory balances of depolluted, dismantled, and flattened ELV flows in the import centers. Constraints (8.w) represent the vehicle recycling factories’ demands for depolluted, dismantled, and flattened ELVs. Constraints (8.x) present measures to avoid cessation of the vehicle recycling factories. These measures are usually prearranged as quantities that can enable maintaining of some minimal workloads in the vehicle recycling factories thus trying to avoid the complete cessation of the recycling business under extreme ELV supply events. Constraints (8.y) ensure that the total capital invested in buying of depolluted, dismantled, and flattened ELVs at the international secondary metal market does not exceed the maximum allowed value. Constraints (8.z.1) define the value domains of the first stage variables for identifying optimal allocation targets of depolluted, dismantled, and flattened ELVs for the vehicle recycling factories. Constraints (8.z.2) define the value domains of the first stage variables for identifying optimal allocation targets of dismantled reusable parts and components for the available dealers. Constraints (8.z.3)–(8.z.21) ensure that the decision variables used in the proposed model are non-negative.
2.6 Solution Algorithm
The flow chart of Fig. 2 may be of assistance in following the logic of the steps that together constitute the algorithm for solving the proposed interval-parameter CVaR two-stage stochastic programming model for management of ELVs:
-
Step 1—Formulate Model (8).
-
Step 2—According to the decision maker’s risk preference, select the weighting factor λ.
-
Step 3—Define the confidence level α.
-
Step 4—Use the Best worst case method to split the Model (8) into the optimistic sub-model corresponding to (f+)α, λ and the conservative sub-model corresponding to (f−)α, λ.
-
Step 5—Solve the optimistic sub-model and obtain solutions of the decision variables and \( {\left({f}_{opt}^{+}\right)}^{\alpha, \lambda } \).
-
Step 6—Calculate the optimized set of allocation targets of depolluted, dismantled, and flattened ELVs as follows: \( Z{E}_{vt\; opt}^{\alpha, \lambda }=Z{E}_{vt}^{-}+{\gamma}_{vt\; opt}^{\alpha, \lambda}\cdot \left(Z{E}_{vt}^{+}-Z{E}_{vt}^{-}\right), \) ∀v ∈ V; ∀ t ∈ {1, ..., T}.
-
Step 7—Calculate the optimized set of allocation targets of dismantled reusable parts and components as follows: \( Z{D}_{dt\; opt}^{\alpha, \lambda }=Z{D}_{dt}^{-}+{\mu}_{dt\; opt}^{\alpha, \lambda}\cdot \left(Z{D}_{dt}^{+}-Z{D}_{dt}^{-}\right), \) ∀d ∈ D; ∀ t ∈ {1, ..., T}.
-
Step 8—Use the optimal allocation targets obtained in steps 6–7 to solve the conservative sub-model and obtain solutions of the decision variables and \( {\left({f}_{opt}^{-}\right)}^{\alpha, \lambda } \).
-
Step 9—Form the final solutions of the Model (8) by combining solutions obtained in steps 5 and 8.
-
Step 10—If the decision maker is satisfied with the obtained expected profit \( {\left({f}_{opt}^{\pm}\right)}^{\alpha, \lambda }={\left[{f}_{opt}^{-},{f}_{opt}^{+}\right]}^{\alpha, \lambda } \), then go to the next step. Otherwise, go to step 3.
-
Step 11—Stop.

Flow chart of the solution algorithm
2.7 Case Study Description
Consider a case study illustrated in Fig. 3. The provincial system for management of ELVs, whose boundary is presented in Fig. 1, is comprised of 15 collection centers, 7 authorized treatment facilities, and 2 import centers. Hazardous substances removed from ELVs during the depolluting processes in the authorized treatment facilities can be treated in two specialized recovery facilities located in the province. Reusable parts and components dismantled from depolluted ELVs in the authorized treatment facilities can be sold on the used parts market, which is comprised from two dealers. Depolluted, dismantled, and flattened ELVs can be allocated to three vehicle recycling factories located in the analyzed province (Fig. 3). Therefore, to fully illustrate the potentials and applicability of the proposed model, a mid-size problem is designed.

A hypothetical provincial system for management of end-of-life vehicles
The quantities of ELVs delivered by vehicle users to the collection centers are highly uncertain. In this case study, nine cases of ELV availability levels are considered; namely, extra low, very low, low, low to medium, medium, medium to high, high, very high, and extra high ELV availability levels.
With the purpose of comprehensively analyzing influences of the risk parameters on model solutions, seven cases for the confidence level α (i.e., 0.50, 0.60, 0.70, 0.80, 0.90, 0.950, and 0.990) are considered in the case study. In addition, the values of λ are set to 0.010, 0.10, 0.20, 0.30, 0.40, 0.50, 0.60, 0.70, 0.80, 0.90, and 1.0, representing different weighting factors specified by the decision makers to trade-off expected profit with system risk. As a result, 77 problem instances are created.
The entire planning horizon is 9 years, divided into three periods with each having a time interval of 3 years. All data used in this case study can be found in Supplementary material (Supplementary Tables S1–S12 in Online Resource).
3 Results and Discussion
The optimization programs are written and executed in the mathematical modeling language LINGO. The number of variables, constraints, and non-zero elements are approximately 6500, 9400, and 54,000, respectively. The computational time of solving the proposed model under different parameter settings is within a few seconds. All problem instances were solved on HP laptop with an Intel(R) Core (TM) i7-7500U 2.7 GHz processor and 16 GB of RAM.
Figure 4 presents the total expected profit of the considered provincial system for management of ELVs under different λ and α values during the planning horizon. The lower and upper parts correspond to the lower and upper bounds of the total expected profit during the 9-year planning horizon, respectively. The lower bound values are achieved under demanding conditions (e.g., smaller revenues from allocating depolluted, dismantled, and flattened ELVs to the vehicle recycling factories as well as reusable parts and components to the available dealers, greater penalties for not delivered depolluted, dismantled, and flattened ELVs as well as reusable parts and components, greater costs of transportation, greater importing cost, greater inventory holding costs in all entities which comprise the provincial system for management of ELVs, more expensive depolluting, dismantling, and flattening in the authorized treatment facilities, more expensive treatment of hazardous substances in the specialized recovery facilities, smaller capacities of tanks for hazardous substances and inventory storage areas, smaller operational capacity of the authorized treatment facilities, etc.), and vice versa.

Total expected profit for different risk parameters during the planning horizon
The results presented in Fig. 4 indicate that the total expected profit decreases when the risk parameters α or λ increase. For instance, when risk parameter λ is set to 0.80, the total expected profits are equal to €[120.51, 219.50] × 106, €[94.29, 202.90] × 106, and €[65.37, 174.44] × 106 under confidence levels of 0.50, 0.90, and 0.990, respectively. Generally, a higher α value assigns more weight to disadvantageous ELV availability levels in the considered province (i.e., extra low, very low, low, and low to medium) thus producing more pessimistic solutions, and vice versa. Accordingly, higher value of confidence level α results not only in lower risk, but also in lower value of the expected profit of the provincial system for management of ELVs. On the other hand, the value of risk parameter λ reveals the risk preference of a decision maker. By changing weighting factor λ, the decision maker is able to trade-off expected profit with system risk. For instance, when risk parameter α is fixed at 0.950, the total expected profits in the entire 9-year planning horizon are equal to €[235.42, 313.52] × 106, €[148.96, 244.28] × 106, and €[43.17, 160.0] × 106 under λ values of 0.10, 0.50, and 1.0, respectively. Therefore, when a lower value of weighting factor λ is selected, higher system risk as well as expected profit are obtained. Generally, higher system risk (i.e., lower values of both risk parameters) provides higher value of the expected profit under both demanding and advantageous conditions, and vice versa. For instance, under risk parameters α and λ equal to 0.50 and 0.010, respectively, the total expected profit increases to €[255.78, 329.53] × 106. On the other hand, under risk parameters α and λ equal to 0.990 and 1.0, respectively, the total expected profit falls to €[17.62, 136.0] × 106.
From Fig. 4 it can be identified that risk parameters α and λ have different sensitivity levels. Generally, the effect of confidence level α on the results amplifies as risk parameter λ increases. Decision-making with risk-inclined preferences brings nearly constant values of the total expected profit under different confidence levels. For instance, under λ values of 0.010 and 0.10, the reduction of confidence level α from 0.990 to 0.50 increases the total expected profit of the considered ELV management system for only €[0.60, 0.73] × 106 and €[5.93, 7.27] × 106, respectively. This indicates that the effect of confidence level on the expected profit is almost insignificant when the waste manager tries to exclude risk when making decisions. Since creating risk-inclined policies is unsuitable for nonrepetitive decision-making problems, such as the management of ELVs, the value of weighting factor λ should be carefully selected. On the other hand, decision-making with risk-neutral preferences makes confidence level α much more influential on the expected profit. For instance, when λ is equal to 0.50, the total expected profits in the entire 9-year planning horizon are equal to €[170.55, 261.0] × 106 and €[136.99, 232.09] × 106 under α values of 0.50 and 0.990, respectively. Finally, when the decision maker has a risk-averse attitude and chooses value of weighting factor λ close to 1.0, even the smallest change of confidence level α produces drastically different expected profit. For instance, when λ is set to 1.0, the total expected profits are equal to €[70.15, 181.43] × 106 and €[53.75, 171.57] × 106 under confidence levels of 0.80 and 0.90, respectively.
In order to reflect real-life uncertainties, which exist in the ELV management systems, various modeling parameters are presented as interval parameters and probability distributions. The existence of these multiple uncertainties results in a relatively wide interval between the lower and upper bound of the objective function (Fig. 4). In fact, the average uncertainty degree, determined as the ratio of its width to its difference, is equal to 51.86%. It proves that the considered ELV management system is highly uncertain. Speaking of system’s uncertainty in general terms, the more distant the time period is for which the planning is done, the more considerable the uncertainty will be in terms of values of all modeling parameters. For this particular reason, the obtained interval width of the expected system profit for the last 3-year planning period is by far the largest. Accordingly, the uncertainty degree is the greatest in the third planning period. In more detail, the average uncertainty degree is equal to 37.05% in the first period, 50.92% in the second period, and 66.84% in the third period. This leads to the conclusion that the waste manager should be more careful when selecting long-term plans for the last 3-year period.
Figure 5 presents the varying trend of the CVaR value under different λ and α values. The reduction of confidence level α produces a lower CVaR value, and vice versa. For instance, when risk parameter λ is fixed at 0.80, the values of CVaR are equal to €[156.64, 194.90] × 106, €[168.22, 207.14] × 106, and €[192.20, 233.46] × 106 under confidence levels of 0.90, 0.950, and 0.990, respectively. On the other hand, the increase in weighting factor of the CVaR criterion generates a lower CVaR value, and vice versa. For instance, when risk parameter α is set to 0.90, the values of CVaR are equal to €[162.76, 201.83] × 106, €[160.98, 199.96] × 106, and €[156.64, 194.90] × 106 under λ fixed at 0.010, 0.40, and 0.90, respectively. Consequently, it can be outlined that a lower CVaR downs both system risk and expected profit.

CVaR value under different λ and α values
Figure 6 provides the optimized allocation targets of depolluted, dismantled, and flattened ELVs for different vehicle recycling factories during the considered planning horizon. Risk-inclined attitude toward decision-making maximizes allocation targets for all vehicle recycling factories no matter which value of confidence level α is selected. For instance, in period 1, period 2, and period 3, the allocation targets for the vehicle recycling factories are equal to 145,080, 148,200, and 151,320 tonnes, respectively, under λ fixed between values 0.01 and 0.30.

Optimal allocation targets of depolluted, dismantled, and flattened ELVs for vehicle recycling factories during the planning horizon
In the first planning period, risk-neutral decision-making (i.e., when values of weighting factor λ are between 0.40 and 0.60) makes confidence level α far more influential on the allocation targets for the vehicle recycling factories. For instance, when λ is set to 0.50, changing confidence level from 0.60 to 0.70 brings the reduction of all three allocation targets for 1560 tonnes (Fig. 6). When weighting factor λ is greater or equal to 0.70, the allocation targets are equal to 143,520 tonnes, which represents their lower bound value. In the second planning period, when values of weighting factor λ vary between 0.50 and 0.80, the allocation targets are significantly affected by risk parameter α. For instance, when λ is fixed at 0.60, the allocation targets of the vehicle recycling factory 3 are equal to 148,100, 148,030, and 146,250 tonnes under confidence levels of 0.60, 0.80, and 0.950, respectively (Fig. 6). Risk-averse decision preferences minimize all three allocation targets in the second 3-year planning period. In the last planning period, risk-averse decision-making combined with a high value of confidence level α produces allocation targets equal to their lower bounds of 148,980 tonnes. Generally, allocation targets are firstly reduced to vehicle recycling factory 2, followed by vehicle recycling factory 3 and then vehicle recycling factory 1. This is because the considered system has the lowest cost for transporting depolluted, dismantled, and flattened ELVs from the authorized treatment facilities to the vehicle recycling factory 1 (Supplementary Table S10 in Online Resource). For instance, in the third planning period, under α = 0.50 and λ = 0.90, allocation targets for vehicle recycling factories 1, 2, and 3 are equal to 151,320, 148,980, and 149,920 tonnes, respectively (Fig. 6).
The allocation targets of dismantled reusable parts and components for the dealers reach their maximum values during the entire planning horizon. More detailed, the allocation targets for the dealers of reusable parts are equal to 18,220, 18,610, and 19,000 tonnes in period 1, period 2, and period 3, respectively. Therefore, these allocation targets are not sensitive to the variations of risk parameters. This is due to the high value of reusable parts on the secondary market (Supplementary Table S1 in Online Resource), i.e., the possibility for the provincial ELV management system to receive significant revenue when their demand is fully satisfied.
Figure 7 presents the varying trend of the total optimized shortages for the vehicle recycling factories under different decision-making risk preferences and ELV availability levels when confidence level is fixed at 0.80. Lower ELV availability level leads to a more pessimistic solutions, and vice versa, i.e., the reduction of ELV availability level increases shortages for all vehicle recycling factories thus generating greater recourse expenses due to more intensive payment of penalties for resource shortages. For instance, when λ is set to 0.50, the total optimized shortages for all vehicle recycling factories are equal to [285.67, 306.12] × 103 and [49.13, 74.24] × 103 tonnes under extra low and low to medium ELV availability levels, respectively.

Optimized shortages of depolluted, dismantled, and flattened ELVs under different decision-making risk preferences and availability levels for α = 0.80. LB, lower bound; UB, upper bound
Regardless of the observed availability level, the vehicle recycling factory 1 is favored in terms of supply of depolluted, dismantled, and flattened ELVs (Fig. 7). Shortages for the vehicle recycling factory 1 are identified only under extra low and very low ELV availability levels. For instance, under extra low ELV availability level in the considered province, the obtained shortages for the entire planning horizon are equal to [44.32, 52.18] × 103, [42.76, 50.62] × 103, and [38.47, 46.33] × 103 tonnes under λ values of 0.010, 0.50, and 1.0, respectively. For the vehicle recycling factory 2, shortages are identified even under medium ELV availability level (Fig. 7). For instance, under demanding conditions (i.e., when the collected quantities of ELVs are equal to the lower bound values), the total optimized shortages for this vehicle recycling factory are equal to 10,704.60 and 6024.60 tonnes under the weighting factor of 0.010 and 0.50, respectively. Supplying vehicle recycling factory 3 proved to be by far the worst under extra low and very low ELV availability levels (Fig. 7). For instance, when the decision maker has a risk-averse attitude, the total optimized shortages and allocated quantities for this vehicle recycling factory are equal to [146.38, 152.10] × 103 and [286.65, 292.37] × 103 tonnes, respectively, under extra low ELV availability level. Generally, the optimized shortages of depolluted, dismantled, and flattened ELVs decrease when the weighting factor λ increases. This indicates that optimal shortages as well as allocations are sensitive to the variations of risk attitudes.
To highlight the advantages of the proposed interval-parameter CVaR two-stage stochastic programming model for management of ELVs, a conventional interval-parameter two-stage stochastic programming (CIPTSSP) model is applied to the case study. However, several assumptions must be made for modeling the problem highlighted in this paper as the conventional interval-parameter two-stage stochastic program, including the following: (1) decision makers have risk-inclined preferences; and (2) effects of the extremely disadvantageous ELV availability levels on ELV management systems are irrelevant.
The total expected profit of the provincial system for management of ELVs in the entire planning horizon obtained with the CIPTSSP model is €[257.52, 330.93] × 106. It is higher than the expected profit generated by the developed model under any investigated value of confidence level α and weighting factor λ. In fact, the obtained solutions from the CIPTSSP model are exactly the same as those from the formulated model when weighting factor λ is set to 0. Hence, the CIPTSSP model is just a special case of the developed interval-parameter CVaR two-stage stochastic programming model for management of ELVs. The CIPTSSP model is not capable to reflect random modeling parameters under extremely disadvantageous ELV availability levels. In fact, the CIPTSSP model only tries to maximize the expected profit without any risk considerations thus producing unreliable long-term plans for the real-life applications. More detailed, allocation targets of depolluted, dismantled, and flattened ELVs for all vehicle recycling factories as well as allocation target of dismantled reusable parts and components for all dealers obtained with the CIPTSSP model are equal to the corresponding upper bound values (Supplementary Table S5 in Online Resource). If extremely disadvantageous ELV availability levels occur during the planning horizon, then the solutions of the CIPTSSP model lead to severe shortages of valuable material flows as well as great financial losses for the provincial ELV management system. In other words, usage of its solutions presents a major risk for waste managers. As a result, compared to the CIPTSSP model, the solutions of the proposed model are far more robust. Actually, the CIPTSSP model is an unrealistic representation of the considered system for management of ELVs.
4 Conclusions
In this paper, the model for risk control of systems for management of ELVs under uncertainty has been presented. The interval-parameter programming, two-stage stochastic programming, and the CVaR risk measurement method are coupled within a general optimization framework. The provided case study has illustrated the potentials and applicability of the formulated model. Even though numerous modeling parameters are presented as interval numbers or probability distributions, the generated solutions do not cause difficulties in the decision-making process. The proposed model could be successfully applied for solving large-scale real-world problems, since its algorithmic solution procedure is straightforward.
The developed interval-parameter CVaR two-stage stochastic programming model for management of ELVs can (1) determine allocation targets of depolluted, dismantled, and flattened ELVs for the multiple vehicle recycling factories; (2) determine allocation targets of reusable parts and components for the multiple dealers; (3) provide production plans of the multiple authorized treatment facilities; (4) provide purchase plans of depolluted, dismantled, and flattened ELVs at the international secondary metal market; (5) manage inventories of ELVs in the multiple collection centers; (6) manage inventories of hazardous substances, reusable parts and components as well as ELVs in the authorized treatment facilities; (7) manage inventories of depolluted, dismantled, and flattened ELVs in the multiple import centers; (8) generate allocation plans of collected ELVs to the authorized treatment facilities; (9) generate allocation plans of hazardous substances removed from ELVs to the multiple specialized recovery facilities; (10) generate allocation plans of dismantled reusable parts and components to the available dealers; and (11) generate allocation plans of (imported) depolluted, dismantled, and flattened ELVs to the vehicle recycling factories. The formulated model has several advantages: (1) it is able to provide the trade-offs between the expected profit and system risk; (2) it can successfully control risk at extremely disadvantageous ELV availability levels; (3) it can produce optimal solutions under predetermined decision-making risk preferences and confidence levels; (4) it can generate far more robust solutions, compared to the conventional interval-parameter two-stage stochastic programming model; and (5) it can provide valuable insights into the effects of uncertainties. The presented model provides an important and contemporary tool for waste managers. In fact, it could be applicable across vehicle recycling industry that processes dozens of millions of ELVs every year.
Future research can be divided into several directions. The first one is to incorporate a multi-stage stochastic programming approach into the modeling framework instead of the two-stage stochastic programming thus providing the possibility to present uncertainties as a multilayer scenario tree. However, this substitution could significantly increase the computation burden. On the other hand, the developed model could not support capacity planning for different facilities of ELV management systems. Since a mixed integer programming approach is suitable for tackling capacity-expansion planning problems, its integration with the formulated model presents another direction for further research. Finally, one of the major weaknesses of previous works is that little has been done to document present vehicle recycling industry practices, especially in the area of ELV management. Hence, additional research efforts that would address this topic are definitely needed.
References
Ahmed, S., Ahmed, S., Shumon, M. R. H., Falatoonitoosi, E., & Quader, M. A. (2016a). A comparative decision-making model for sustainable end-of-life vehicle management alternative selection using AHP and extent analysis method on fuzzy AHP. International Journal of Sustainable Development & World Ecology, 23(1), 83–97. https://doi.org/10.1080/13504509.2015.1062814.
Ahmed, S., Ahmed, S., Shumon, M. R. H., Quader, M. A., Cho, H. M., & Mahmud, M. I. (2016b). Prioritizing strategies for sustainable end-of-life vehicle management using combinatorial multi-criteria decision making method. International Journal of Fuzzy Systems, 18(3), 448–462. https://doi.org/10.1007/s40815-015-0061-0.
Alsaadi, N. A., & Franchetti, M. J. (2016). An integrated approach to vehicle recycling facilities. International Journal of Environmental Science and Development, 7(11), 856–860. https://doi.org/10.18178/ijesd.2016.7.11.894.
Andersson, F., Mausser, H., Rosen, D., & Uryasev, S. (2001). Credit risk optimization with Conditional Value-at-Risk criterion. Mathematical Programming, 89(2), 273–291. https://doi.org/10.1007/s101070000201.
Andersson, M., Ljunggren Söderman, M., & Sandén, B. A. (2017a). Are scarce metals in cars functionally recycled? Waste Management, 60, 407–416. https://doi.org/10.1016/j.eist.2017.03.001.
Andersson, M., Ljunggren Söderman, M., & Sandén, B. A. (2017b). Lessons from a century of innovating car recycling value chains. Environmental Innovation and Societal Transitions., 25, 142–157. https://doi.org/10.1016/j.eist.2017.03.001.
Anthony, C., & Cheung, W. M. (2017). Cost evaluation in design for end-of-life of automotive components. Journal of Remanufacturing, 7, 97–111. https://doi.org/10.1007/s13243-017-0035-5.
Artzner, P., Delbaen, F., Eber, J. M., & Heath, D. (1999). Coherent measures of risk. Mathematical Finance, 9(3), 203–228. https://doi.org/10.1111/1467-9965.00068.
Balcı, S., & Ayvaz, B. (2017). A mixed integer linear programming model for end of life vehicles recycling network design. Southeast Europe Journal of Soft Computing, 6(1), 20–31. https://doi.org/10.21533/scjournal.v6i1.130.
Bruyère, D., Simon, S., Haas, H., Conte, T., & Menad, N.-E. (2016). Cryogenic ball milling: a key for elemental analysis of plastic-rich automotive shedder residue. Powder Technology, 294, 454–462. https://doi.org/10.1016/j.powtec.2016.03.009.
Carneiro, M. C., Ribas, G. P., & Hamacher, S. (2010). Risk management in the oil supply chain: a CVaR approach. Industrial and Engineering Chemistry Research, 49(7), 3286–3294. https://doi.org/10.1021/ie901265n.
Chen, Z., Chen, D., Wang, T., & Hu, S. (2015). Policies on end-of-life passenger cars in China: dynamic modeling and cost-benefit analysis. Journal of Cleaner Production, 108, 1140–1148. https://doi.org/10.1016/j.jclepro.2015.07.093.
Chen, D., Mao, P., Sun, D., & Yang, S. (2016). Study on green supply chain coordination in ELV recycling system with government subsidy for the third-party recycler. International Journal of Materials Sciences, 6(1), 66–71. https://doi.org/10.1016/10.12783/ijmsci.2016.0601.07.
Chinneck, J. W., & Ramadan, K. (2000). Linear programming with interval coefficients. The Journal of the Operational Research Society, 51(2), 209–220. https://doi.org/10.1057/palgrave.jors.2600891.
Cin, E., & Kusakcı, A. O. (2017). A literature survey on reverse logistics of end of life vehicles. Southeast Europe Journal of Soft Computing, 6(1), 32–39. https://doi.org/10.21533/scjournal.v6i1.132.
Dai, C., Cai, X. H., Cai, Y. P., Huo, Q., Lv, Y., & Huang, G. H. (2014). An interval-parameter mean-CVaR two-stage stochastic programming approach for waste management under uncertainty. Stochastic Environmental Research and Risk Assessment, 28(2), 167–187. https://doi.org/10.1007/s00477-013-0738-6.
Dai, C., Sun, W., Tan, Q., Liu, Y., Lu, W. T., & Guo, H. C. (2016). Risk management for sulfur dioxide abatement under multiple uncertainties. Frontiers of Earth Science, 10(1), 87–107. https://doi.org/10.1007/s11707-015-0495-6.
Demirel, E., Demirel, N., & Gökçen, H. (2016). A mixed integer linear programming model to optimize reverse logistics activities of end-of-life vehicles in Turkey. Journal of Cleaner Production, 112(3), 2101–2113. https://doi.org/10.1016/j.jclepro.2014.10.079.
Desnica, E., Vulic, M., & Nikolic, M. (2016). AHP method in the function of adequate equipment choice for ELV detoxification in Serbia and EU. Applied. Engineering Letters, 1(4), 115–121.
Ene, S., & Öztürk, N. (2015). Network modeling for reverse flows of end-of-life vehicles. Waste Management, 38, 284–296. https://doi.org/10.1016/j.wasman.2015.01.007.
EU. (2000). Directive 2000/53/EC of the European parliament and of the council of 18 September 2000 on end-of-life vehicles. Official Journal of the European Union L269, 34–42. http://eur-lex.europa.eu/LexUriServ/LexUriServ.do?uri=CELEX:32000L0053:EN:HTML. Accessed 10th of July, 2017.
Farel, R., Yannou, B., Ghaffari, A., & Leroy, Y. (2013). A cost and benefit analysis of future end-of-life vehicle glazing recycling in France: a systematic approach. Resources, Conservation and Recycling, 74, 54–65. https://doi.org/10.1016/j.resconrec.2013.02.013.
Gebreslassie, B. H., Yoa, Y., & You, F. (2012). Design under uncertainty of hydrocarbon biorefinery supply chains: multiobjective stochastic programming models, decomposition algorithm, and a comparison between CVaR and downside risk. AICHE Journal, 58(7), 2155–2179. https://doi.org/10.1002/aic.13844.
Gołębiewski, B., Trajer, J., Jaros, M., & Winiczenko, R. (2013). Modelling of the location of vehicle recycling facilities: a case study in Poland. Resources, Conservation and Recycling, 80, 10–20. https://doi.org/10.1016/j.resconrec.2013.07.005.
Gotoh, J.-y., & Takano, Y. (2007). Newsvendor solutions via conditional value-at-risk minimization. European Journal of Operational Research, 179(1), 80–96. https://doi.org/10.1016/j.ejor.2006.03.022.
Harraz, N. A., & Galal, N. M. (2011a). Design of sustainable end-of-life vehicle recovery network in Egypt. Ain Shams Engineering Journal, 2(3–4), 211–219. https://doi.org/10.1016/j.asej.2011.09.006.
Harraz, N. A., & Galal, N. M. (2011b). Network design for end of life vehicles recovery in countries with developing economy. International Journal of Sustainable Water and Environmental Systems, 3(1), 5–11. https://doi.org/10.5383/swes.03.01.002.
Hu, S., & Wen, Z. (2017). Monetary evaluation of end-of-life vehicle treatment from a social perspective for different scenarios in China. Journal of Cleaner Production, 159, 257–270. https://doi.org/10.1016/j.jclepro.2017.05.042.
Inghels, D., Dullaert, W., Raa, B., & Walther, G. (2016). Influence of composition, amount and life span of passenger cars on end-of-life vehicles waste in Belgium: a system dynamics approach. Transportation Research Part A: Policy and Practice, 91, 80–104. https://doi.org/10.1016/j.tra.2016.06.005.
Jekel, L. J., & Tam, E. K. L. (2007). Plastics waste processing: comminution size distribution and prediction. Journal of Environmental Engineering, 133(2), 245–254. https://doi.org/10.1061/(ASCE)0733-9372(2007)133:2(245).
Ji, L., Zhang, X. P., Huang, G. H., & Yin, J. G. (2015). Development of an inexact risk-aversion optimization model for regional carbon constrained electricity system planning under uncertainty. Energy Conversion and Management, 94, 353–364. https://doi.org/10.1016/j.enconman.2015.01.050.
Karakayalı, I., Emir-Farinas, H., & Akçalı, E. (2010). Pricing and recovery planning for demanufacturing operations with multiple used products and multiple reusable components. Computers and Industrial Engineering, 59(1), 55–63. https://doi.org/10.1016/j.cie.2010.02.016.
Khodier, A., Williams, K., & Dallison, N. (2017). Challenges around automotive shredder residue production and disposal. Waste Management, 73, 566–573. https://doi.org/10.1016/j.wasman.2017.05.008.
Li, P., Dahmus, J., Guldberg, S., Riddervold, H. O., & Kirchain, R. (2011). How much sorting is enough: identifying economic and scrap-reuse benefits of sorting technologies. Journal of Industrial Ecology, 15(5), 743–759. https://doi.org/10.1111/j.1530-9290.2011.00365.x.
Li, W., Wang, B., Xie, Y. L., Huang, G. H., & Liu, L. (2015). An inexact mixed risk-aversion two-stage stochastic programming model for water resources management under uncertainty. Environmental Science and Pollution Research, 22(4), 2964–2975. https://doi.org/10.1007/s11356-014-3547-7.
Li, W., Feng, C., Dai, C., Li, Y., Li, C., & Liu, M. (2016). An inexact risk management model for agricultural land-use planning under water shortage. Frontiers of Earth Science, 10(3), 419–431. https://doi.org/10.1007/s11707-015-0544-1.
Liao, H., Deng, Q., & Wang, Y. (2017). Optimal acquisition and production policy for end-of-life engineering machinery recovering in a joint manufacturing/remanufacturing system under uncertainties in procurement and demand. Sustainability, 9(3), 338. https://doi.org/10.3390/su9030338.
Mahmoudzadeh, M., Mansour, S., & Karimi, B. (2013). To develop a third-party reverse logistics network for end-of-life vehicles in Iran. Resources, Conservation and Recycling, 78, 1–14. https://doi.org/10.1016/j.resconrec.2013.06.006.
Marzieh, M. (2014). Supply chain risk assessment for perishable products applying system dynamics methodology—a case of fast fashion apparel industry. PhD Thesis. Department of Industrial and Manufacturing Systems Engineering, University of Windsor, Windsor, Ontario, Canada. http://scholar.uwindsor.ca/etd/5203. Accessed 10th of July, 2017.
Merkisz-Guranowska, A. (2011). End-of-life vehicles recycling network design. Journal of KONES Powertrain and Transport, 18(3), 261–268.
Merkisz-Guranowska, A. (2013). Multicriteria optimization model for end-of-life vehicles’ recycling network. International Journal of Sustainable Development and Planning, 8(1), 88–99. https://doi.org/10.2495/SDP-V8-N1-88-99.
Ministry of Environment (ME). (2010). Act on resource circulation of electrical and electronic equipment and vehicles. https://policy.asiapacificenergy.org/node/2661. Accessed 10th of July, 2017.
Ministry of the Environment (MOE). (2002). Law on recycling of end-of-life vehicles. http://www.meti.go.jp/policy/automobile/recycle/Rejoubuneigo.pdf. Accessed 10th of July, 2017.
Moghaddam, I. G., Nick, M., Fallahi, F., Sanei, M., & Mortazzai, S. (2013). Risk-averse profit-based optimal operation strategy of a combined wind farm-cascade hydro system in an electricity market. Renewable Energy, 55, 252–259. https://doi.org/10.1016/j.renene.2012.12.023.
Mora, C., Cascini, A., Gamberi, M., Regattieri, A., & Bortolini, M. (2014). A planning model for the optimisation of the end-of-life vehicles recovery network. International Journal of Logistics Systems and Management, 18(4), 449–472. https://doi.org/10.1504/IJLSM.2014.063980.
Nakano, K., & Shibahara, N. (2017). Comparative assessment on greenhouse gas emissions of end-of-life vehicles recycling methods. Journal of Material Cycles and Waste Management., 19, 505–515. https://doi.org/10.1007/s10163-015-0454-z.
Nakatani, J., Konno, K., & Moriguchi, Y. (2017). Variability-based optimal design for robust plastic recycling systems. Resources, Conservation and Recycling, 116, 53–60. https://doi.org/10.1016/j.resconrec.2016.09.020.
National Development and Reform Commission (NDRC). (2006). Technical policy for the recovery and utilization of automobile products. http://www.asianlii.org/cn/legis/cen/laws/ttpftrauoap730/. Accessed 10th of July, 2017.
Noyan, N. (2012). Risk-averse two-stage stochastic programming with an application to disaster management. Computers & Operations Research, 39(3), 541–559. https://doi.org/10.1016/j.cor.2011.03.017.
Ogryczak, W., & Ruszczynski, A. (2002). Dual stochastic dominance and related mean–risk models. SIAM Journal on Optimization, 13(1), 60–78. https://doi.org/10.1137/S1052623400375075.
Özceylan, E., Demirel, N., Çetinkaya, C., & Demirel, E. (2017). A closed-loop supply chain network design for automotive industry in Turkey. Computers and Industrial Engineering, 113, 727–745. https://doi.org/10.1016/j.cie.2016.12.022.
Parlikad, A. K., & McFarlane, D. (2010a). Quantifying the impact of AIDC technologies for vehicle component recovery. Computers and Industrial Engineering, 59(2), 296–307. https://doi.org/10.1016/j.cie.2010.04.011.
Parlikad, A. K., & McFarlane, D. (2010b). Value of information in product recovery decisions: a Bayesian approach. International Journal of Sustainable Engineering, 3(2), 106–121. https://doi.org/10.1080/19397030903499810.
Pavlovic, A., Tadic, D., Arsovski, S., Kokic, A., & Jevtic, D. (2011). Network design for the dismantling centers of the end-of-life vehicles under uncertainties: a case study. Strojarstvo, 53(5), 373–382.
Pflug, G. (2000). Some remarks on the value-at-risk and the conditional value-at-risk. In S. Uryasev (Ed.), Probabilistic constrained optimization: methodology and applications (pp. 272–281). Dordrecht: Kluwer Academic Publishers. https://doi.org/10.1007/978-1-4757-3150-7_15.
Phuc, P. N. K., Yu, V. F., & Tsao, Y.-C. (2017). Optimizing fuzzy reverse supply chain for end-of-life vehicles. Computers and Industrial Engineering, 113, 757–765. https://doi.org/10.1016/j.cie.2016.11.007.
Pourjavad, E., & Mayorga, R. V. (2016a). A combined fuzzy approach to determine sustainable ELV strategy. International Journal of Transportation Systems, 1, 78–83.
Pourjavad, E., & Mayorga, R. V. (2016b). A hybrid approach integrating AHP and TOPSIS for sustainable end-of-life vehicle strategy evaluation under fuzzy environment. WSEAS Transactions on Circuits and Systems, 15, 216–223.
Rockafellar, R. T., & Uryasev, S. (2000). Optimization of conditional value-at-risk. Journal of Risk, 2(3), 21–41. https://doi.org/10.21314/JOR.2000.038.
Rockafellar, R. T., & Uryasev, S. (2002). Conditional value-at-risk for general loss distributions. Journal of Banking and Finance, 26(7), 1443–1471. https://doi.org/10.1016/S0378-4266(02)00271-6.
Ruffino, B., Fiore, S., & Zanetti, M. C. (2014). Strategies for the enhancement of automobile shredder residues (ASRs) recycling: results and cost assessment. Waste Management, 34(1), 148–155. https://doi.org/10.1016/j.wasman.2013.09.025.
Schmid, A., Batton-Hubert, M., Naquin, P., & Gourdon, R. (2016). Multi-criteria evaluation of end-of-life vehicles’ dismantling scenarios with respect to technical performance and sustainability issues. Resources, 5(4), 42. https://doi.org/10.3390/resources5040042.
Schultz, R., & Tiedemann, S. (2006). Conditional value-at-risk in stochastic programs with mixed-integer recourse. Mathematical Programming, 105(2), 365–386. https://doi.org/10.1007/s10107-005-0658-4.
Shao, L. G., Qin, X. S., & Xu, Y. (2011). A Conditional value-at-risk based inexact water allocation model. Water Resources Management, 25(9), 2125–2145. https://doi.org/10.1007/s11269-011-9799-9.
Sharma, P., Sharma, A., Sharma, A., & Srivastava, P. (2016). Automobile waste and its management. Research Journal of Chemical and Environmental Sciences, 4(2), 1–7.
Simic, V. (2015). A two-stage interval-stochastic programming model for planning end-of-life vehicles allocation under uncertainty. Resources, Conservation and Recycling, 98, 19–29. https://doi.org/10.1016/j.resconrec.2015.03.005.
Simic, V. (2016a). A multi-stage interval-stochastic programming model for planning end-of-life vehicles allocation. Journal of Cleaner Production, 115, 366–381. https://doi.org/10.1016/j.jclepro.2015.11.102.
Simic, V. (2016b). Interval-parameter chance-constraint programming model for end-of-life vehicles management under rigorous environmental regulations. Waste Management, 52, 180–192. https://doi.org/10.1016/j.wasman.2016.03.044.
Simic, V., & Dimitrijevic, B. (2012a). Modeling production processes in a vehicle recycling plant. Waste Management & Research, 30(9), 940–948. https://doi.org/10.1177/0734242X12454695.
Simic, V., & Dimitrijevic, B. (2012b). Production planning for vehicle recycling factories in the EU legislative and global business environments. Resources, Conservation and Recycling, 60, 78–88. https://doi.org/10.1016/j.resconrec.2011.11.012.
Simic, V., & Dimitrijevic, B. (2013). Modeling of automobile shredder residue recycling in the Japanese legislative context. Expert Systems with Applications, 40(18), 7159–7167. https://doi.org/10.1016/j.eswa.2013.06.075.
Simic, V., & Dimitrijevic, B. (2015). Interval linear programming model for long-term planning of vehicle recycling in the Republic of Serbia under uncertainty. Waste Management & Research, 33(2), 114–129. https://doi.org/10.1177/0734242X14565208.
Soleimani, H., & Kannan, G. (2014). Reverse logistics network design and planning utilizing conditional value at risk. European Journal of Operational Research, 237, 487–497. https://doi.org/10.1007/s10107-005-0658-4.
Soleimani, H., Seyyed-Esfahani, M., & Kannan, G. (2014). Incorporating risk measures in closed-loop supply chain network design. International Journal of Production Research, 52(6), 1843–1867. https://doi.org/10.1080/00207543.2013.849823.
Sun, Y., Wang, Y. T., Chen, C., & Yu, B. (2017). Optimization of a regional distribution center location for parts of end-of-life vehicles. Simulation: Transactions of the Society for Modeling and Simulation International, 94, 577–591. https://doi.org/10.1177/0037549717708049.
Tian, J., & Chen, M. (2016). Assessing the economics of processing end-of-life vehicles through manual dismantling. Waste Management, 56, 384–395. https://doi.org/10.1016/j.wasman.2016.07.046.
Tong, S. C. (1994). Interval number, fuzzy number linear programming. Fuzzy Sets and Systems, 66(3), 301–306. https://doi.org/10.1016/0165-0114(94)90097-3.
Uryasev, S. (2000). Conditional Value-at-Risk: optimization algorithms and applications. Financial Engineering News, 14, 1–5. https://doi.org/10.1109/CIFER.2000.844598.
Uryasev, S., & Rockafellar, R. T. (2001). Conditional value-at-risk: optimization approach. In S. Uryasev & P. M. Pardalos (Eds.), Stochastic optimization: algorithms and applications (pp. 119–128). Dordrecht: Kluwer Academic Publishers. https://doi.org/10.1007/978-1-4757-6594-6_17.
Vidovic, M., Dimitrijevic, B., Ratkovic, B., & Simic, V. (2011). A novel covering approach to positioning ELV collection points. Resources, Conservation and Recycling, 57, 1–9. https://doi.org/10.1016/j.resconrec.2011.09.013.
Wang, Y. Y., Huang, G. H., & Wang, S. (2017). CVaR-based factorial stochastic optimization of water resources systems with correlated uncertainties. Stochastic Environmental Research and Risk Assessment, 31, 1543–1553. https://doi.org/10.1007/s00477-016-1276-9.
Webby, R. B., Adamson, P. T., & Boland, J. (2007). The Mekong—applications of value at risk (VaR) and conditional value at risk (CVaR) simulation to the benefits, costs and consequences of water resources development in a large river basin. Ecological Modelling, 201(1), 89–96. https://doi.org/10.1016/j.ecolmodel.2006.07.033.
Xia, X., Li, J., Tian, H., Zhou, Z., Li, H., Tian, G., & Chu, J. (2016). The construction and cost-benefit analysis of end-of-life vehicle disassembly plant: a typical case in China. Clean Technologies and Environmental Policy, 18(8), 2663–2675. https://doi.org/10.1007/s10098-016-1185-0.
Xie, Y. L., & Huang, G. H. (2014). An optimization model for water resources allocation risk analysis under uncertainty. Journal of Hydroinformatics, 16(1), 144–164. https://doi.org/10.2166/hydro.2013.239.
Xie, Y. L., Huang, G. H., Li, W., Li, J. B., & Li, Y. F. (2013). An inexact two-stage stochastic programming model for water resources management in Nansihu Lake Basin, China. Journal of Environmental Management, 127, 188–205. https://doi.org/10.1016/j.jenvman.2013.04.027.
Yamout, G. M., Hatfield, K., & Romeijn, H. E. (2007). Comparison of new conditional value-at-risk-based management models for optimal allocation of uncertain water supplies. Water Resources Research, 43(7), W07430. https://doi.org/10.1029/2006WR005210.
Yao, H., Li, Z., & Lai, Y. (2013). Mean-CVaR portfolio selection: a nonparametric estimation framework. Computers & Operations Research, 40(4), 1014–1122. https://doi.org/10.1016/j.cor.2012.11.007.
Zarei, M., Mansour, S., Kashan, A. H., & Karimi, B. (2010). Designing a reverse logistics network for end-of-life vehicles recovery. Mathematical Problems in Engineering Article ID 649028, 1–16. https://doi.org/10.1155/2010/649028.
Zhang, C., & Chen, M. (2017). Prioritising alternatives for sustainable end-of-life vehicle disassembly in China using AHP methodology. Technology Analysis and Strategic Management, 30, 556–568. https://doi.org/10.1080/09537325.2017.1340640.
Zhang, C., & Guo, P. (2017). An inexact CVaR two-stage mixed-integer linear programming approach for agricultural water management under uncertainty considering ecological water requirement. Ecological Indicators, 92, 342–353. https://doi.org/10.1016/j.ecolind.2017.02.018.
Zhou, Z. Q., Tan, H. M., & Dai, G. H. (2012). Research of value analysis oriented end of life vehicle dismantling and recycling process. Advanced Materials Research, 518-523, 3450–3454. https://doi.org/10.4028/www.scientific.net/AMR.518-523.3450.
Zhou, F., Lin, Y., Wang, X., Zhou, L., & He, Y. (2016a). ELV recycling service provider selection using the hybrid MCDM method: a case application in China. Sustainability, 8(5), 482. https://doi.org/10.3390/su8050482.
Zhou, Z., Dai, G., Cao, J., & Guo, G. (2016b). A novel application of PSO algorithm to optimize the disassembly equipment layout of ELV. International Journal of Simulation: Systems, Science and Technology, 17(46), 1–6. https://doi.org/10.5013/IJSSST.a.17.46.16.
Zhu, Y., Li, Y. P., & Huang, G. H. (2015). An optimization decision support approach for risk analysis of carbon emission trading in electric power systems. Environmental Modelling & Software, 67, 43–56. https://doi.org/10.1016/j.envsoft.2014.12.024.
Acknowledgements
The author is grateful to the advisory editor and the anonymous reviewers for their insightful comments and suggestions.
Funding
This work was partially supported by Ministry of Education, Science and Technological Development of the Republic of Serbia through the project TR 36006 for the period 2011–2019.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Electronic supplementary material
ESM 1
(DOCX 73 kb)
Appendix. Notation
Appendix. Notation
1.1 Indices and sets
t—index of time period, t ∈ {1, …, T}
c—index of collection center, c ∈ {1, …, | C| }
a—index of authorized treatment facility, a ∈ {1, …, | A| }
x—index of specialized recovery facility, x ∈ {1, …, | X| }
d—index of dealer of reusable parts, d ∈ {1, …, | D| }
i—index of import center, i ∈ {1, …, | I| }
v—index of vehicle recycling factory, v ∈ {1, …, | V| }
s—index of ELV availability level, s ∈ {1, …, | S| }
C—set of collection centers located in the region
A—set of authorized treatment facilities located in the region
X—set of specialized recovery facilities located in the region
D—set of dealers of reusable parts (i.e., used parts market) located in the region
I—set of import centers located in the region
V—set of considered vehicle recycling factories located in the region
St—set of ELV availability levels in period t
\( \mathrm{S}=\underset{t\in \left\{1,...,\mathrm{T}\right\}}{\cup }{\mathrm{S}}_t \)—set of ELV availability levels
1.2 Parameters
T—number of analyzed time periods
f±—expected profit to ELV management system over the multi-period planning horizon
α—confidence level
λ—weighting factor specified by decision makers to trade-off expected profit with risk
\( pro{b}_{st},s\in {\mathrm{S}}_t\left( pro{b}_{st}>0,\forall s,t;\sum \limits_{s\in {\mathrm{S}}_t} pro{b}_{st}=1,\forall t\right) \)—probability of ELV availability level s in period t
\( C{Q}_{sct}^{\pm },c\in \mathrm{C},s\in {\mathrm{S}}_t \)—available quantity of ELVs in collection center c with probability level probst in period t
\( R{E}_{vt}^{\pm },v\in \mathrm{V} \)—revenue to ELV management system per weight unit of depolluted, dismantled, and flattened ELVs allocated to vehicle recycling factory v in period t (first stage parameter)
\( P{E}_{vt}^{\pm },v\in \mathrm{V}\left(P{E}_{vt}^{\pm }>R{E}_{vt}^{\pm },\forall \mathrm{v},t\right) \)—penalty to ELV management system per weight unit of depolluted, dismantled, and flattened ELVs not delivered to vehicle recycling factory v in period t (second stage parameter)
\( R{D}_{dt}^{\pm },d\in \mathrm{D} \)—revenue to ELV management system per weight unit of reusable parts and components allocated to dealer d in period t (first stage parameter)
\( P{D}_{dt}^{\pm },d\in \mathrm{D}\left(P{D}_{vt}^{\pm }>R{D}_{dt}^{\pm },\forall d,t\right) \)—penalty to ELV management system per weight unit of reusable parts and components not delivered to dealer d in period t (second stage parameter)
Δt—duration of planning period t in time units
ϒat—total working time of authorized treatment facility a in period t
\( ZM{E}_{vt\;\min}^{\pm },v\in \mathrm{V} \)—the minimum quantity of depolluted, dismantled, and flattened ELVs that must be allocated to vehicle recycling factory v in period t to avoid cessation
\( {\rho}_t^{\pm } \)—share of hazardous substances that are required to remove from ELVs during depolluting process in period t
\( {\tau}_t^{\pm } \)—share of reusable parts and components with market value in depolluted ELVs in period t
\( I{O}_c^{\pm },c\in \mathrm{C} \)—initial inventory weight of ELVs piled up in collection center c
\( I{\varXi}_a^{\pm },a\in \mathrm{A} \)—initial inventory weight of hazardous substances in storage tanks of authorized treatment facility a
\( I{\varOmega}_a^{\pm },a\in \mathrm{A} \)—initial inventory weight of reusable parts and components dismantled from depolluted ELVs and stored in authorized treatment facility a
\( I{H}_a^{\pm },a\in \mathrm{A} \)—initial inventory weight of depolluted, dismantled, and flattened ELVs piled up in storage area of authorized treatment facility a
\( I{\varPsi}_i^{\pm },i\in \mathrm{I} \)—initial inventory weight of depolluted, dismantled, and flattened ELVs piled up in import center i
\( C{T}_{cat}^{\pm },c\in \mathrm{C},a\in \mathrm{A} \)—transportation cost per weight unit of ELVs from collection center c to authorized treatment facility a in period t
\( D{T}_{adt}^{\pm },a\in \mathrm{A},d\in \mathrm{D} \)—transportation cost per weight unit of dismantled reusable parts and components from authorized treatment facility a to dealer d in period t
\( S{T}_{axt}^{\pm },a\in \mathrm{A},x\in \mathrm{X} \)—transportation cost per weight unit of hazardous substances from authorized treatment facility a to specialized recovery facility x in period t
\( A{T}_{avt}^{\pm },a\in \mathrm{A},v\in \mathrm{V} \)—transportation cost per weight unit of depolluted, dismantled, and flattened ELVs from authorized treatment facility a to vehicle recycling factory v in period t
\( I{T}_{ivt}^{\pm },i\in \mathrm{I},v\in \mathrm{V} \)—transportation cost per weight unit of depolluted, dismantled, and flattened ELVs from import center i to vehicle recycling factory v in period t
\( DP{C}_{at}^{\pm },a\in \mathrm{A} \)—depolluting cost per weight unit of ELVs in authorized treatment facility a in period t
\( DS{C}_{at}^{\pm },a\in \mathrm{A} \)—dismantling cost per weight unit of depolluted ELVs in authorized treatment facility a in period t
\( FL{C}_{at}^{\pm },a\in \mathrm{A} \)—flattening cost per weight unit of depolluted and dismantled ELVs in authorized treatment facility a in period t
\( TR{C}_{xt}^{\pm },x\in \mathrm{X} \)—treatment cost per weight unit of hazardous substances in specialized recovery facility x in period t
\( {U}_{it}^{\pm },i\in \mathrm{I} \)—importing cost per weight of depolluted, dismantled, and flattened ELVs ordered at the international secondary metal market and delivered to import center i in period t
\( U{B}_{t\;\max}^{\pm } \)—the maximum allowed expenses for ordering depolluted, dismantled, and flattened ELVs at the international secondary metal market in period t
\( SC{O}_{ct}^{\pm },c\in \mathrm{C} \)—inventory holding cost per weight unit and time unit for ELVs piled up in collection center c in period t
\( SC{\varXi}_{at}^{\pm },a\in \mathrm{A} \)—inventory holding cost per weight unit and time unit for hazardous substances in storage tanks of authorized treatment facility a in period t
\( SC{\varOmega}_{at}^{\pm },a\in \mathrm{A} \)—inventory holding cost per weight unit and time unit for reusable parts and components dismantled from depolluted ELVs stored in authorized treatment facility a in period t
\( SC{H}_{at}^{\pm },a\in \mathrm{A} \)—inventory holding cost per weight unit and time unit for depolluted, dismantled, and flattened ELVs piled up in storage area of authorized treatment facility a in period t
\( SC{\varPsi}_{it}^{\pm },i\in \mathrm{I} \)—inventory holding cost per weight unit and time unit for imported depolluted, dismantled, and flattened ELVs piled up in import center i in period t
\( O{C}_{at}^{\pm },a\in \mathrm{A} \)—operational capacity of authorized treatment facility a in period t
\( CP{\varXi}_a^{\pm },a\in \mathrm{A} \)—capacity of tanks for hazardous substances in authorized treatment facility a
\( CP{\varOmega}_a^{\pm },a\in \mathrm{A} \)—inventory storage capacity for reusable parts and components dismantled from depolluted ELVs in authorized treatment facility a
\( CP{H}_a^{\pm },a\in \mathrm{A} \)—capacity of storage area for depolluted, dismantled, and flattened ELVs in authorized treatment facility a
\( CP{\varPsi}_i^{\pm },i\in \mathrm{I} \)—capacity of storage area for depolluted, dismantled, and flattened ELVs in import center i
1.3 Variables
\( {\zeta}_{st}^{\pm } \)—auxiliary variable to compute the CVaR
\( {\eta}_t^{\pm } \)—VaR in period t when the confidence level is α
\( Z{E}_{vt}^{\pm },v\in \mathrm{V} \)—allocation target of depolluted, dismantled, and flattened ELVs for vehicle recycling factory v in period t (the first stage decision variable)
γvt, v ∈ V(γvt ∈ [0, 1], ∀v, t)—the first stage decision variable that is used for identifying \( Z{E}_{vt}^{\pm }=Z{E}_{vt}^{-}+\varDelta Z{E}_{vt}\cdot {\gamma}_{vt} \) (where \( \varDelta Z{E}_{vt}=Z{E}_{vt}^{+}-Z{E}_{vt}^{-} \)), which is an optimal allocation target of depolluted, dismantled, and flattened ELVs for vehicle recycling factory v in period t
\( M{E}_{svt}^{\pm },v\in \mathrm{V},s\in {\mathrm{S}}_t \)—quantity by which allocation target of depolluted, dismantled, and flattened ELVs for vehicle recycling factory v is not met under ELV availability level s in period t (the second stage decision variable)
\( Z{D}_{dt}^{\pm },d\in \mathrm{D} \)—allocation target of dismantled reusable parts and components for dealer d in period t (the first stage decision variable)
μdt, d ∈ D (μdt∈[0, 1], ∀d,t)—the first stage decision variable that is used for identifying \( Z{D}_{dt}^{\pm }=Z{D}_{dt}^{-}+\varDelta Z{D}_{dt}\cdot {\mu}_{dt} \) (where \( \varDelta Z{D}_{dt}=Z{D}_{dt}^{+}-Z{D}_{dt}^{-} \)), which is an optimal allocation target of reusable parts and components dismantled from ELVs for dealer d in period t
\( M{D}_{sdt}^{\pm },d\in \mathrm{D},s\in {\mathrm{S}}_t \)—quantity by which allocation target of dismantled reusable parts and components for dealer d is not met under ELV availability level s in period t (the second stage decision variable)
\( A{Q}_{scat}^{\pm },c\in \mathrm{C},a\in \mathrm{A},s\in {\mathrm{S}}_t \)—quantity of ELVs allocated between collection center c and authorized treatment facility a under ELV availability level s in period t
\( HS{Q}_{sat}^{\pm },a\in \mathrm{A},s\in {\mathrm{S}}_t \)—quantity of hazardous substances removed from ELVs in authorized treatment facility a under ELV availability level s in period t
\( AS{Q}_{saxt}^{\pm },a\in \mathrm{A},x\in \mathrm{X},s\in {\mathrm{S}}_t \)—quantity of hazardous substances allocated between authorized treatment facility a and specialized recovery facility x under ELV availability level s in period t
\( D{Q}_{sat}^{\pm },a\in \mathrm{A},s\in {\mathrm{S}}_t \)—quantity of depolluted ELVs in authorized treatment facility a under ELV availability level s in period t
\( DP{Q}_{sat}^{\pm },a\in \mathrm{A},s\in {\mathrm{S}}_t \)—quantity of reusable parts and components dismantled from depolluted ELVs in authorized treatment facility a under ELV availability level s in period t
\( AP{Q}_{sadt}^{\pm },a\in \mathrm{A},d\in \mathrm{D},s\in {\mathrm{S}}_t \)—quantity of dismantled reusable parts and components allocated between authorized treatment facility a and dealer d under ELV availability level s in period t
\( B{Q}_{sat}^{\pm },a\in \mathrm{A},s\in {\mathrm{S}}_t \)—quantity of depolluted, dismantled, and flattened ELVs in authorized treatment facility a under ELV availability level s in period t
\( V{Q}_{savt}^{\pm },a\in \mathrm{A},v\in \mathrm{V},s\in {\mathrm{S}}_t \)—quantity of depolluted, dismantled, and flattened ELVs allocated between authorized treatment facility a and vehicle recycling factory v under ELV availability level s in period t
\( U{Q}_{sit}^{\pm },i\in \mathrm{I},s\in {\mathrm{S}}_t \)—quantity of depolluted, dismantled, and flattened ELVs imported from the international secondary metal market and delivered to import center i under ELV availability level s in period t
\( UI{Q}_{sivt}^{\pm },i\in \mathrm{I},v\in \mathrm{V},s\in {\mathrm{S}}_t \)—quantity of imported depolluted, dismantled, and flattened ELVs allocated between import center i and vehicle recycling factory v under ELV availability level s in period t
\( {O}_{sct}^{\pm },\mathrm{c}\in \mathrm{C},s\in {\mathrm{S}}_t \)—weight of ELVs piled up in collection center c at the end of period t under ELV availability level s
\( {\varXi}_{sat}^{\pm },a\in \mathrm{A},s\in {\mathrm{S}}_t \)—weight of hazardous substances in storage tanks of authorized treatment facility a at the end of period t under ELV availability level s
\( {\varOmega}_{sat}^{\pm },a\in \mathrm{A},s\in {\mathrm{S}}_t \)—weight of reusable parts and components dismantled from depolluted ELVs and stored in authorized treatment facility a at the end of period t under ELV availability level s
\( {H}_{sat}^{\pm },a\in \mathrm{A},s\in {\mathrm{S}}_t \)—weight of depolluted, dismantled, and flattened ELVs piled up in storage area of authorized treatment facility a at the end of period t under ELV availability level s
\( {\varPsi}_{sit}^{\pm },i\in \mathrm{I},s\in {\mathrm{S}}_t \)—weight of depolluted, dismantled, and flattened ELVs piled up in import center i at the end of period t under ELV availability level s
Rights and permissions
About this article

Cite this article
Simic, V. Interval-Parameter Conditional Value-at-Risk Two-Stage Stochastic Programming Model for Management of End-of-Life Vehicles. Environ Model Assess 24, 547–567 (2019). https://doi.org/10.1007/s10666-018-9648-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10666-018-9648-9