
Abstract
Between June and December 2005, active and passive acoustic telemetry was used to examine fine scale movements of 13 white sharks (Carcharodon carcharias) (ten passive, three active) at Mossel Bay. A total of 24 active trackings (ranging from 2 h to 103 h in duration) were conducted. Patterns of rate of movement (ROM), swimming linearity (LI), swimming bearing, and instantaneous swimming speed (ISS) were assessed. A conversion quotient (Q) of 1.21 between ISS and ROM (10 min sample interval) was calculated suggesting ROM is a good indicator of white shark activity. The mean ROM for tracked sharks was 0.52 m·s−1, with a greatest sustained ROM of 1.33 m·s−1 (4.8 km·h−1). Sharks displayed greatest LI and ROM during directional travels between the three persistent aggregation sites. The majority of the shark movement was, however, non-linear as the sharks repeat patrolled at the three aggregation sites. Two of these sites were not associated with pinniped presence, and sharks typically patrolled back and forth parallel to the shore line at a comparatively low ROM which suggested resting. The third aggregation site was adjacent to Seal Island, and despite low LI, sharks displayed a high ROM, indicating high activity levels. We propose that the high ROM is related to maximising search area when patrolling to hunt Cape fur seals (Arctocephalus p. pusillus).
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
The white shark (Carcharodon carcharias) is a large marine predator, the movement patterns of which appear to be characterized by periods of fidelity at aggregation sites interspersed by periods of sustained swimming (Boustany et al. 2002; Bonfil et al. 2005; Bruce et al. 2006; Weng et al. 2007). In South Africa, white sharks are conspicuous inhabitants in the coastal waters off the south Western Cape (Kock and Johnson 2006) where, documented aggregation sites are often, but not exclusively, aligned with islands containing rookeries of Cape fur seals (Arctocephalus pusillus pusillus) (Compagno et al. 1997; Kock et al. 2002; Johnson 2003). Documenting the fine scale movement and activity patterns of white sharks within such aggregation sites provides insights into how, and why, they utilize these chosen habitats in time and space.
Active and passive ultrasonic telemetry has been successfully used to describe fine scale movement patterns in various species of sharks (Gruber et al. 1988; Sundström et al. 2001, Voegeli et al. 2001; Rechisky and Wetherbee 2003). Rate of movement (ROM: the distance travelled by an animal over a certain time period, also known as point-to-point swimming speed or speed over the ground), instantaneous swimming speed (ISS: speed of the animal through the water), swimming linearity and swimming orientation have frequently been used as indices to both quantify and qualify how a species interacts with its surrounding environment (Sundström et al. 2001).
Carey et al. (1982) completed the first and only multiple day active track of a white shark, following an individual for 83 h over a distance of 190 km. Despite absence of GPS technology, this study calculated an overall ROM of 3.2 km·h−1 based on obvious landmarks. Strong et al. (1992) tracked seven white sharks at offshore islands in the Lower Spencer Gulf, Australia, which included two continuous tracks of over 24 h. They described three behavioural patterns, including downstream circling in the remnants of a chum slick, island patrolling, and inter island cruising. They also calculated an average ROM of 3.2 km·h−1 (n = 145, 15 min interval), similar to that observed by Carey et al. (1982). Subsequent tracking by Goldman and Anderson (1999) were limited to discrete periods of time during daylight hours at the Farallon Islands, California, where they determined a lower average ROM of 2.3 km·h−1 (std. dev. = 0.6, n = 20, 1 min interval), possibly related to the non-linear nature of the tracks, which were characterized by a combination of along shore sweeps and on-offshore movements. Klimley et al. (2001a) deployed a radio-acoustic positioning setup to passively examine presence and swimming patterns of white sharks adjacent to a pinniped colony (Año Nuevo Island, California). A number (three out of six) of the studied sharks preferred a ‘back and forth’ swimming pattern parallel to the island’s shoreline. Klimley et al. (2001b) documented bursts of speed of 6 m·s−1 and 7 m·s−1, the fasted recorded speeds for a white shark. Bonfil et al. (2005) presented the first swimming speed data of a long distance migration, based on smoothed geolocation positional fixes, by a 360 cm female white shark. While traversing from South Africa to the Australia’s western seaboard, she maintained a mean swimming speed of 4.7 km·h−1.
At present, the swimming and activity patterns of white sharks have been described from acoustic and satellite telemetry at either (a) offshore pinniped islands (Strong et al. 1992; Goldman and Anderson 1999; Klimley et al. 2001a) or (b) offshore localities not associated with landmasses (Carey et al. 1982; Bonfil et al. 2005). No published information on the fine scale swimming patterns of white sharks at near shore (mainland) coastal localities (<2,000 m), or within South Africa is available. The aim of this study is to address this lack of information by describing near shore swimming patterns of white sharks at Mossel Bay, South Africa, a known coastal aggregation site.
Materials and methods
Study site
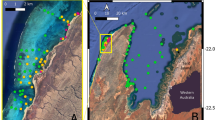
Mossel Bay (34°08′S, 22°07′E) is a semi-closed bay situated on the south western coast of South Africa (Fig. 1). White sharks in this area have been studied since 2001, although a commercial cage-diving operator has kept records of white shark sightings since 1995. There is also an island (Seal Island) in the bay, located 800 m from the shore, on which ca 4,000 Cape fur seals live. Topographically, the bay is shallow (the 20 m depth contour is reached between 1,230 m and 2,760 m offshore) with a flat bottom consisting either of exposed reef or sand. A peninsula protects the inner bay on the south western side from the prevailing weather. The result is a calm protected bay, rare on this part of South Africa’s exposed coastline (Fig. 1).

Mossel Bay study site showing major features and bathymetry. Included are three tracking periods illustrating the seven distinct behavioural activity patterns (SI Patrol, travel 1, patrol 1, travel 2, patrol 2, chum vessel and roam) exhibited by tracked white sharks during study. Inset illustrates position of Mossel Bay on South Africa’s coastline
Telemetry
Telemetry equipment used in this study were frequency specific VEMCO V16 continuous acoustic transmitters (continuous pingers) and V16 RCODE acoustic transmitters (coded pingers). Real-time manual tracking of sharks fitted with continuous pingers was conducted using a boat-mounted VEMCO VR60 acoustic receiver and directional hydrophone, whilst VEMCO VR2 data logging receivers (VR2 receivers) were placed on the bottom of the ocean to detect and archive the presence of sharks tagged with coded pingers (Voegeli et al. 2001; Heupel et al. 2006). The VR2 receivers were serviced (data downloaded, receiver cleaned, battery changed) every 3–6 months.
White sharks were lured to an anchored vessel by using chum and bait (for detail see Kock and Johnson 2006) for viewing, photographing and tagging purposes. Between June and December 2005, three white sharks were fitted externally with continuous pingers using a standard tagging pole. Following tagging, chumming ceased and tracking commenced. Standard tracking protocols (see below) were initiated once the subject shark ceased downstream circling (Strong et al. 1992) in the remnant of the vessel’s chum slick (ca 10–30 min).
One of the following three standard tracking protocols was then initiated. Protocol 1 involved obtaining a positional fix of the tagged shark at 10 min intervals using a Magellan GPS device. The next step was to cut the boat’s engines, and whilst drifting, to submerge a VR2 receiver to one meter to determine if any sharks tagged with coded pingers were nearby. At the same time environmental data, such as, light intensity (day, sunset, dusk, night, dawn, sunrise) were recorded. Other data, such as, bottom structure (reef, mixed, sand), water temperature (°C) and water depth (m) were collected using the boat’s echo-sounder. Between 2 min and 5 min (depending on signal strength) prior to the next required positional fix, submerged instrumentation was removed and a single engine was used to reposition the vessel. A second tracking protocol (protocol 2) of obtaining positional fixes at ca 5 min intervals was followed when the shark was near (ca 500 m) Seal Island. Protocol 2 enabled us to maintain contact with the shark despite the island causing depletion in signal strength, and to ensure that any attempted attack on a pinniped was witnessed. A third opportunistic tracking protocol (protocol 3) was adopted when a shark swam at the surface for a prolonged period of time. This involved maintaining the tracking vessel ca 20 m behind the shark and taking positional fixes every min. This tracking distance from the shark was determined based on observational investigations that revealed approaches within ca 5 m of the shark would occasionally result in disturbed behaviour (e.g. diving and altering course). As no disturbed behaviour was observed at a following distance of 20 m or more, a decision was made to maintain a tracking distance of at least 20 m from the shark to prevent the boat presence from influencing the behaviour and movements of the shark.
Tracking was conducted by teams of two to four persons working 12–24 h shifts. On most occasions, assistance provided by the local tourism operators, or the presence of a second research vessel, allowed tracking to continue uninterrupted when changing shifts. However, occasionally the tracking boat had to return to the harbour to change crews, unavoidably creating data gaps of 40–70 min in the continuous track.
VR2 receivers continuously archived the date and time when any RCODE tagged white shark was nearby a given VR2 receiver (environmental conditions had a major impact on VR2 detection field, average range determined at 300 m). Such data archived by four VR2 receivers situated at two widely spaced localities (Grootbrak and Hartenbos, Fig. 1) was used to examine ROM by RCODE tagged sharks swimming along the coast.
Data analysis
Data generated during tracking protocols ‘2’ and ‘3’ (5 min and 1 min sampling intervals respectively) were aggregated to increase the sampling interval to ca 10 min for standardization purposes. All recorded tracks of shark movements were then plotted onto a digital chart of Mossel Bay using Arcview 3.2 and assessed using the animal movement analysis extension (AMAE: Hooge and Eichenlaub 2000). ROM was then calculated by dividing this displacement distance with the corresponding sample interval. Although ROM does not represent swimming speeds, it does give insight into relative activity. To examine if ROM patterns were dependent on time of day, measurements collected were pooled into (a) four categories (i.e. daylight, dusk (±1 h from sunset), night and dawn (±1 h from sunrise)) and (b) hourly, then tested using ANOVA and Tukey’s HSD test. A second estimate of ROM used time intervals of RCODE tagged sharks that travelled between widely spaced (>10 km) VR2 receivers at Grootbrak and Hartenbos. To calculate the distances between receivers, locations were plotted on a digital chart, with 600 m subtracted from each measurement (~300 m detection field for each receiver) to determine a more accurate estimate of distance between receiver detection fields.
The overall swimming linearity of each track was calculated using AMAE, with the resultant statistic termed ‘angular concentration’ (r). Angular concentration ranges from 0 (completely non-linear swimming) to 1 (straight line swimming) (Batschelet 1981). Rayleigh’s z-test was used to test for significant linearity in swimming pathways for individual tracks. Variation in ROM may be caused by change in ISS, but also may result from variation in swimming linearity, current strength or vertical movement. During successive sample intervals, an index of swimming linearity (LI) was calculated using the following equation developed by Bell and Kramer (1979):
where Fn = the third position taken, F1 = the first position taken, D = the total distance travelled during the interval.
Swim bearings between consecutive positions were established using standard trigonometry techniques (cosine rule). Calculated bearings were pooled into 12 intervals (30° range) with 0° representing due north. Data was separated into ‘shark activity’ groupings, and bearing frequency was examined for randomness using chi square analysis.
Data recorded during tracking protocol 3 (1 min sample interval) was used to (a) calculate the approximate ISS of a shark, as well as, (b) compare ISS with ROM. ROM calculated at one-min intervals was assumed to reflect ISS of the shark for that period. Comparable ROM measurements were established by aggregating this protocol 3 data to increase the sample interval to 10 min. To establish a conversion quotient (Q) between ROM and ISS the following calculation was made Q = ISSmean / ROMmean.
Results
Three female white sharks were tracked 24 times between June 2005 and December 2005 for a combined period of 477 h (Table 1), during which a total of 2,531 positional fixes (mean interval 10.3 min, range 3.0–68.0 min) were obtained from which 2409 ROM measurements and 2029 LI recordings were calculated. The mean ROM of the three white sharks was 0.52 m·s−1 (range 0.00–1.98 m·s−1), whilst mean ROM between the three sharks differed significantly (ANOVA, F (2, 2405) = 39.4, P < 0.01). Pairwise analysis revealed that the mean ROM of GWS-001 was significantly less than that of GWS-002 (Tukey’s HSD test, GWS-002 ≠ GWS-001), although the small sample size (n = 3) restricts the evaluation of this finding’s biological importance (Tables 1 and 2).
The angular concentration (r) of the 24 tracks showed that the majority of tracks (87.5%) were non-linear, indicating a high degree of habitat re-use in the study site (Table 1). Three tracks (20, 21 and 22) showed significant linearity in terms of their overall angular concentration (Table 1). These tracks were unique in that the shark swam in a sustained northeast direction from the Hartenbos to the Grootbrak site (e.g. 13 October track, Fig. 1).
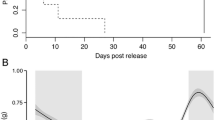
ROM was significantly affected by light conditions (F(3, 2404) =26.635, p < 0.01). with the highest values during dusk and dawn (Tukey’s HSD test, Dusk = Dawn ≠ Night ≠ Day). LI was also affected significantly by light levels (ANOVA, F(3,2271) = 3.201, p < 0.05, S) peaking at dusk (Tukeys HSD test, Dusk ≠ Night = Day = Dawn). However, hourly observations indicated that the crepuscular peaks of ROM were not mirrored by LI patterns (Fig. 2).

Mean ROM (± standard error) and LI (± standard error) of white sharks grouped hourly. Shaded area represents approximate period of darkness
Amongst the five natural behaviours (excluding activities related to the cage diving operation i.e. ‘roam’ and ‘chum vessel’), the mean ROM differed significantly (ANOVA F(4, 2344) = 206.0, p < 0.01). Pairwise comparison identified four distinct groupings (Tukey’s HSD test, Travel 2 = Travel 1 ≠ SI Patrol ≠ Patrol 2 ≠ Patrol 1) with the greatest ROM measured as sharks travelled between the patrolling localities (SI patrol, Patrol 1, Patrol 2). In addition, ROM was higher whilst patrolling Seal Island than patrolling at the other localities (Fig. 3). Furthermore, a significant interaction effect was observed with respect to shark activity and light levels with respect to ROM (F(11, 2200) =3.3216, p < .01). Graphically, this significant interaction effect derives from the sharks displaying a greater ROM whilst hunting in daylight as opposed to other light conditions.

Relationship between natural behavioural activities (as defined in Table 2) and the mean ROM (± standard error) and swimming linearity LI (± standard error) of the manually tracked white sharks
Swimming LI was also significantly influenced by shark activity (ANOVA F(4, 1977) = 53.24, p < 0.01). Pairwise analysis revealed three distinct groups (Tukey’s HSD test, Travel 2 = Travel 1 ≠ Patrol 2 ≠ Patrol 1 = SI Patrol), with LI greatest as sharks travelled between patrolling localities (Fig. 3). No interaction effect existed between light levels and shark activity with respect to LI, (MANOVA, F(11,2204) =1.51, p = 0.12).
During the three overall linear tracks, LI measurements confirmed that sharks utilized a near straight line swimming pattern parallel to the coastline (Track 20: 0.998, Track 21: 0.992, Track 22: 0.995). The mean ROM during these three tracks (Track 20: 1.05, Track 21: 0.93, Track 22: 0.89 m·s−1) differed significantly amongst one another (ANOVA, F(2, 54) = 7.098, p < 0.01), but likely resembled ISS. VR2 listening stations placed at Grootbrak and Hartenbos closely resembled the start and finish positions of the straight line swimming portions of the three tracks. Ten white sharks fitted with RCODE transmitters made a total of 239 swims between these widely spaced receivers. The quickest swim was made by a 350 cm male (RCODE-532) that completed the 11.23 km swim in 02h20, at a sustained ROM of 1.33 m·s−1 (4.8 km·h−1). Significant difference in ROM between Hartenbos and Grootbrak existed with respect to shark total length (Kruskal-Wallis, H (4,239) = 63.69, p < 0.01), with larger sharks moving between the receivers more quickly than their smaller conspecifics (Fig. 4). Pair wise analysis revealed two significant groupings, namely sharks greater or less than 325 cm TL (Multiple comparison ‘p’ values, 350 = 400 ≠ 300 = 250 = 200).

ROM of 10 RCODE tagged white sharks swimming between the VR2 receivers at Hartenbos and Grootbrak against estimated shark total length
The swim orientation of the sharks appeared to be closely aligned with shoreline topography during four of the five shark activities (Fig. 5a–e). Sharks patrolling at Grootbrak (Patrol 2, χ 2(0.05, 11) = 211.7, p < 0.01) and Hartenbos (Patrol 1, χ 2(0.05, 11) = 706.3, p < 0.01) preferred to swim back and forth parallel to the coastline rather than perpendicular to it (Fig. 5c, d). As expected, the swim bearings between the three patrolling sites also consisted of swimming mainly parallel to the coastline (Travel 1, χ 2(0.05, 11) = 209.7, p < 0.01; Travel 2, χ 2(0.05, 11) = 204.7, p < 0.01) (Fig. 5b, e). Swim patterns adjacent to Seal Island were directionally more random than during other activities, but a significant preference for swimming perpendicular to Seal Island (towards or away from) was calculated (SI patrol χ 2(0.05, 11) = 37.3, p < 0.01) (Fig. 5a).

a–e Combined circular plots of the movement bearing concentration of three white sharks manually tracked at Mossel Bay (Fig. 5a: SI Patrol, 5b: Travel 1, 5c: Patrol 1, 5d: Patrol 2, 5e: Travel 2). Bearing concentrations are separated by shark activity and examined for randomness using χ2 analysis. Individual bearings are pooled into 30’ intervals. Light gray shapes represent position of landmass(s) with respect to approximate geographic positions
On 11 occasions (Tracks: 12a–f, 23a–e), sharks persistently swam at the surface thereby enabling the ‘protocol 3’ tracking procedure to be followed. During these tracks, the quotient between mean ISS and mean ROM (sample interval 10 min) was 1.21 (n = 55, range 1.01–3.19).
Discussions and conclusions
The results in this paper are derived from three actively tracked sharks, and ten passively monitored sharks. Whilst the resultant data illustrates pertinent trends in swimming behaviour of these sharks, the small sample size necessitates caution in population level extrapolation. This study’s mean ROM of 0.52 m·s−1 is noticeably lower than previous findings both from areas adjacent to pinniped colonies (0.64 m·s−1; Goldman and Anderson 1999) and during open water movements (0.89 m·s−1, Carey et al. 1982; 0.89 m·s−1, Strong et al. 1992; 1.31 m·s−1, Bonfil et al. 2005). However, when assessing ROM in relation to a shark’s specific behavioural activity the results display some consistency with previous works. At Mossel Bay, the ROM of sharks patrolling adjacent to Seal Island was comparable to studies located adjacent to pinniped colonies (Goldman and Anderson 1999). It is also of note that whilst ROM is greater while patrolling Seal Island than at either of the two other patrolling localities, swimming linearity was comparable. This suggests that the sharks increased their swimming speed whilst patrolling around Seal Island. This makes biological sense, as increased swimming speed would increase patrol coverage, and thus increase the probability of encountering a traversing pinniped. Alternatively, ROM may be reduced during other activities (Patrol 1 and Patrol 2) to conserve energy, particularly if sharks are not hunting for non-pinniped prey. Klimley et al. (2001b) reported that most sharks utilized a ‘back and forth’ patrol pattern when swimming adjacent to Año Nuevo Island, whilst Goldman and Anderson (1999) observed both ‘back and forth’ and an ‘on-offshore’ pattern at the Farallon Islands, California. Adjacent to Seal Island, at Mossel Bay, white sharks most frequently used an ‘on-offshore’ patrol pattern. Cape fur seals consistently use a narrow pathway when traversing between Seal Island and offshore feeding grounds (Johnson et al. In prep.). Patrolling in parallel beneath these pathways may maximize the spatial overlap and increase encounter probability.
The swimming behaviour of white sharks at coastal aggregation sites without pinniped presence (Patrol 1 and Patrol 2) has not been reported previously. This activity pattern was typically defined by low ROM (0.42 m·s−1 and 0.51 m·s−1) and non-linear swimming (LI: 0.69 and 0.81). This pattern was particularly evident at Hartenbos, a habitat particularly used by white sharks during hiatuses between morning and evening patrolling bouts at Seal Island. Such characteristics appear consistent with high degree of meandering that could be explained by either resting or aggregating for social purposes. The ROM and LI at the Grootbrak patrolling locality were higher than at Hartenbos. Such a pattern may result if, in addition to resting and social purposes, white sharks are attracted to this habitat because of teleost and elasmobranch prey availability, as Grootbrak represents a popular fishing site for kob species (Argyrosomus japonicus and/or A. indorus) (personal obvservations). Increased ROM and LI may arise if sharks are actively searching for this and/or other fish prey. White sharks at both Hartenbos and Grootbrak typically utilized a ‘back and forth’ patrol pattern parallel to the coastline. Adoption of this pattern may be related to navigational and orientation clues or restricting movements to within preferred depth contours.
When our data was restricted to ‘travelling’ behaviours (Travel 1, Travel 2), white sharks at Mossel Bay displayed similar ROM to the findings of both the Carey et al. (1982) and Strong et al. (1992), whose subjects’ movements was frequently characterized by near linear swimming. This indicates a degree of consistency between widely separated studies. The fastest sustained ROM we recorded (1.33 m·s−1) was similar to the previous fastest of 1.31 m·s−1, reported by Bonfil et al. (2005). These ROMs may approximate the top end of white sharks’ swimming speed when not actively chasing prey. When examining the ROM of sharks during sustained travel, larger sharks (>325 cm TL) appeared to swim quicker than smaller conspecifics, thereby suggesting sustained swimming speed may be a function of body length. This may have implications in terms of the ability to conduct long distance migrations for the first time, such as those observed previously (Boustany et al. 2002; Bonfil et al. 2005; Weng et al. 2007). In addition, larger sharks could possess greater navigation and orientation experience, enabling them to move between sites quickly. As expected, LI and ROM during ‘travelling’ behaviour were high. The pattern of high ROM and LI may be explained if the areas traversed represented poor quality habitats that lacked attractive resources for white sharks (e.g. food). Adopting near linear swim patterns offers efficient movement through such areas, whilst remaining near to shore offers a conspicuous sensory cue for orientation and navigation purposes. Such a pattern is similar to the ‘island patrolling’ pattern observed by Strong et al. (1992), in which it was hypothesized that subject sharks swam in a near linear pattern between islands potentially hosting pinniped food resources.
Frequently, ROM has been used to elicit information on a species’ diel activity patterns. As such, constant (whale shark, Rhincodon typus, (Gunn et al. 1999), nocturnal (blue shark, Prionace glauca, Sciarrotta and Nelson 1977), diurnal (tiger shark, Galeocerdo cuvier, Tricas et al. 1981) and crepuscular (lemon shark, Negaprion brevirostris, Gruber et al. 1988) patterns have been reported in shark species, although intraspecific variation exists (Sundström et al. 2001). Within this study, both sharks (GWS-1 and GWS-2) displayed crepuscular patterns of activity, with ROM greatest during dawn and dusk. This pattern appears to be generated by the fact that the ‘Travel 1’ and ‘SI Patrolling’ activities are typically associated with dawn and dusk when white sharks swim to Seal Island and patrol for traversing pinnipeds. These temporal windows for patrolling Seal Island may be related to either optimal environmental conditions for hunting (e.g. light condition favourable for detecting prey) or prey behaviour (e.g. highly abundant and accessible). No multiple day tracks at Grootbrak (Patrol 2) were carried out during this study. The reported crepuscular diel pattern may differ markedly at Grootbrak where white sharks there are not targeting pinniped prey, but possibly fish prey.
ROM is occasionally incorrectly thought to represent ISS (Sundström et al. 2001). Reduction in swimming linearity and increasing the sample interval will cause ROM to increasingly underestimate ISS. As such, differences in published ROM of white sharks may have been generated in part by different tracking protocols rather than biological differences in swimming speed. The use of a combination of techniques has enabled the relationship between ROM and ISS to be established for three species of shark. For the lemon shark (Q = 1.67) (Sundström et al. 2001) and blue shark (Prionace glauca) (Q = 1.08 (daytime), 1.56 (night time)) (Sciarrotta and Nelson 1977) ISS was up to 50% greater than ROM, whilst the ISS for the scalloped hammerhead (Sphyrna lewini) was reported as 2.3 (ISS = 1.5 km·h−1, ROM = 0.66 km·h−1) times higher than its corresponding ROM (Lowe et al. 1998). The present study suggests ISS is in the order of 1.21 times higher than the equivalent ROM for white sharks in Mossel Bay. Such a value supports the assumption that variations in presented ROM are likely to indicate variation in swimming speed and activity, particularly when information on swimming linearity is available. It remains clear, however, that greater consistency in tracking protocols between studies would enable more robust inter- and intra-specific comparisons.
References
Batschelet E (1981) Circular statistics in biology. Academic, London
Bell WJ, Kramer E (1979) Search and anemotactic orientation of cockroaches. J Insect Physiol 25:631–640. doi:10.1016/0022-1910(79)90112-4
Bonfil R, Meyër MA, Scholl MC, Johnson RL, O’Brian S, Oosthuizen WH, Swanson S, Kotze D, Patterson M (2005) Transoceanic migration, spatial dynamics, and population linkages of white sharks. Science 310:100–103. doi:10.1126/science.1114898
Boustany AM, Davis SF, Pyle P, Anderson SD, Le Boeuf BJ, Block BA (2002) Satellite tagging: expanded niche for white sharks. Nature 412(6867):35–36. doi:10.1038/415035b
Bruce BD, Stevens JD, Malcolm H (2006) Movements and swimming behaviour of white shark (Carcharodon carcharias) in Australian waters. Mar Biol (Berl) 150:161–172. doi:10.1007/s00227-006-0325-1
Carey FG, Kanwisher JW, Brazier O, Gabrielson G, Casey JG, Pratt H (1982) Temperature and activities of a white shark (Carcharodon carcharias). Copeia 2:254–260. doi:10.2307/1444603
Compagno LJV, Marks MA, Fergusson IK (1997) Threatened fishes of the world—Carcharodon carcharias (Linnaeus, 1758) (Lamnidae). Environ Biol Fishes 50:61–62. doi:10.1023/A:1007308406137
Goldman KJ, Anderson S (1999) Space utilisation and swimming depth of white shark (Carcharodon carcharias) at the South Farallon Islands, central California. Environ Biol Fishes 56:351–364. doi:10.1023/A:1007520931105
Gruber SH, Nelson DR, Morrissey JF (1988) Patterns of activity and space utilization of lemon sharks, Negaprion brevirostris, in a shallow Bahamian lagoon. Bull Mar Sci 43(1):61–76
Gunn JS, Stevens JD, Davis TLO, Norman BM (1999) Observation of the short-term movements and behaviour of whale sharks (Rhincodon typus) at Ningaloo Reef, Western Australia. Mar Biol (Berl) 135:553–559. doi:10.1007/s002270050656
Heupel MR, Semmens JM, Hobday AJ (2006) Automated acoustic tracking of aquatic animals: scales, design and deployment of listening station arrays. Mar Freshw Res 57:1–13. doi:10.1071/MF05091
Hooge PN, Eichenlaub B (2000) Animal movement extension to Arcview. ver. 2.0. Alaska Science Center—Biological Science Office, U.S. Geological Survey, Anchorage, AK, USA
Johnson RL (2003) Behavioural ecology of the white shark (Carcharodon carcharias) at Dyer Island, South Africa. MSc Thesis, University of Pretoria, Pretoria, South Africa
Klimley PA, Le Boeuf BJ, Cantara KM, Richert JE, Davis SF, Van Sommeran S (2001a) Radio acoustic positioning tool for studying site-specific behaviour of white sharks and other large marine species. Mar Biol (Berl) 138:429–446. doi:10.1007/s002270000394
Klimley PA, Le Boeuf BJ, Cantara KM, Richert JE, Davis SF, Van Sommeran S, Kelly JT (2001b) The hunting strategy of white sharks (Carcharodon carcharias) near a seal colony. Mar Biol (Berl) 138:617–636. doi:10.1007/s002270000489
Kock A, Johnson R (2006) White shark abundance: Not a causative factor in numbers of shark bite incidences. In: Nel DC, Peschak TP (eds) Finding a balance: White shark conservation and recreational safety in inshore waters of Cape Town, South Africa: Proceedings of a specialist workshop. WWF South Africa report series—2006/Marine/001, pp 1–19
Kock AA, Fallows CG, Griffiths CL (2002) Predatory activity of great white sharks (Carcharodon carcharias) around a Cape fur seal colony. BSc Thesis, Percy Fitzpatrick Institute, University of Cape Town, South Africa
Lowe CG, Holland KN, Wolcott TG (1998) A new acoustic tail beat transmitters for fishes. Fish Res 36:275–283. doi:10.1016/S0165-7836(98)00109-X
Rechisky EL, Wetherbee BM (2003) Short-term movements of juvenile and neonate sandbar sharks, Carcharhinus plumbeus, on their nursery grounds in Delaware Bay. Environ Biol Fishes 68:113–128. doi:10.1023/B:EBFI.0000003820.62411.cb
Sciarrotta TC, Nelson DR (1977) Diel behaviour of the blue shark, Prionace glauca, near Santa Catalina Island, California. US Fish Bull 75:519–528
Sundström LF, Gruber SH, Clermont SM, Correia JPS, de Marignac JRC (2001) Review of elasmobranch behavioural studies using ultrasonic telemetry with special reference to the lemon shark, Negaprion brevirostris, around Bimini Islands, Bahamas. Environ Biol Fishes 60:225–250. doi:10.1023/A:1007657505099
Strong WR, Murphy RC, Bruce BD, Nelson DR (1992) Movements and associated observations of bait attracted white sharks (Carcharodon carcharias): a preliminary report. Aust J Mar Freshwater Res 43:13–20. doi:10.1071/MF9920013
Tricas TC, Taylor LR, Naftel G (1981) Diel behaviour of the tiger shark, Galeocerdo cuvier, at French Frigate Shoals, Hawaiian Islands. Copeia 1981:904–908. doi:10.2307/1444199
Voegeli FA, Smale MJ, Webber DM, Andrade A, O’Dor RK (2001) Ultrasonic telemetry, tracking and automated monitoring technology for sharks. Environ Biol Fishes 60:267–281. doi:10.1023/A:1007682304720
Weng KC, Boustany AM, Pyle P, Anderson SD, Brown A, Block BA (2007) Migration and habitat of white sharks (Carcharodon carcharias) in the eastern Pacific Ocean. Mar Biol (Berl) 152(4):877–894. doi:10.1007/s00227-007-0739-4
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Johnson, R., Bester, M.N., Dudley, S.F.J. et al. Coastal swimming patterns of white sharks (Carcharodon carcharias) at Mossel Bay, South Africa. Environ Biol Fish 85, 189–200 (2009). https://doi.org/10.1007/s10641-009-9477-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10641-009-9477-4