
Abstract
With the introduction of performance-based earthquake engineering (PBEE), engineers have strived to relate building performance to different seismic hazard levels. Expected annual loss (EAL) and collapse safety described by mean annual frequency of collapse (MAFC) have become employed more frequently, but tend to be limited to seismic assessment rather than design. This article outlines an integrated performance-based seismic design (IPBSD) method that uses EAL and MAFC as design parameters. With these, as opposed to conventional intensity-based strength and/or drift requirements, IPBSD limits expected monetary losses and maintains a sufficient and quantifiable level of collapse safety in buildings. Through simple procedures, it directly identifies feasible structural solutions without the need for detailed calculations and numerical analysis. This article outlines its implementation alongside other contemporary risk-targeted and code-based approaches. Several case study reinforced concrete frame structures are evaluated using these approaches and the results appraised via verification analysis. The agreement and consistency of the design solutions and the intended targets are evaluated to demonstrate the suitability of each method. The proposed framework is viewed as a stepping stone for seismic design with advanced performance objectives in line with modern PBEE requirements.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Over the years, the earthquake engineering community has worked towards preventing damage of structural and non-structural elements in frequent low-intensity earthquakes and preventing collapse in rare high-intensity earthquakes. After the economic impact of the 1994 Northridge earthquake in the US due to extensive damage and overall disruption, an immediate shift was necessary for building performance definition. Traditional objectives of seismic codes or assessment frameworks, focusing on life safety and collapse prevention of buildings, were not sufficient for complete satisfactory building performance. The change happened with the introduction of performance-based earthquake engineering (PBEE) during the latter half of the 1990s with the Vision 2000 framework (SEAOC 1995). It related desired building performance to various seismic hazard levels via the definition of limit states or performance levels. These were termed fully operational, operational, life-safe, and near-collapse, corresponding to hazard levels of frequent, occasional, rare, and very rare events, respectively. In the early 2000s, FEMA-356 (Emergency and Agency 2000) emerged and established element deformation and force-based acceptability criteria for different performance levels of structural and non-structural elements.
Following the initial interpretations of PBEE, a more robust and powerful probabilistic framework was developed and set the basis for what is known as the Pacific Earthquake Engineering Research (PEER) Centre PBEE methodology (Cornell and Krawinkler 2000). It centres around the idea of probabilistically quantifying the mean annual frequency of exceedance (MAFE), or failure, of a limit state, λf, by integrating the probability of failure for a chosen intensity measure (IM), P[f|IM = im], with the site hazard curve, H(im), as follows (Cornell et al. 2002):
This modernised approach quantifies the building performance in an overall risk sense and is flexible in its definition of failure, allowing consistent consideration across all pertinent limit states (e.g. onset of structural/non-structural damage and collapse). Therefore, the overall performance of the building can be quantified via more meaningful metrics to building owners or stakeholders (e.g. casualties, economic losses, anticipated downtime). Due to the probabilistic nature of the framework and its computationally expensive implementation in certain situations, it has been largely popular within academic research or specialised reports (FEMA 2012; CNR 2014) rather than widespread code implementation for practitioners to use. Furthermore, given the nature of the framework, it has been predominantly developed for the assessment of existing buildings as opposed to the design of new ones.
With the evolution of PBEE concerning new design, this article builds on a framework recently proposed by O’Reilly and Calvi (2019). It utilises collapse risk alongside economic loss control in a simplified manner as the main design inputs and performance objectives remain consistent with the goals of PBEE (Vamvatsikos et al. 2016). This article first reviews risk-targeted design methods proposed in the literature along with current code-based approaches. The proposed framework is introduced and described in a step-by-step manner for the case of reinforced concrete (RC) frame structures. Application of these methods is investigated via several case study frame buildings to assess their ability in satisfying the required performance objectives in an efficient manner suitable for future building codes. This article focuses on the satisfaction of collapse risk requirements facet and these methods’ ability to limit economic losses will be focused on in future work.
2 Seismic design of structures
2.1 Existing design code approaches
Current seismic design codes primarily focus on ensuring the life safety of building occupants by avoiding structural collapse. Additionally, performance at frequent levels of ground shaking is to be checked and verified. These are termed the no-collapse requirement and damage limitation requirement in the current version of Eurocode 8 (EC8) (CEN 2004b) and are implemented at ground shaking return periods of 475 and 95 years, respectively, with possible modifications to account for building importance class. New Zealand’s NZS1170 (NZS 2004) defines two limits states, termed as serviceability and ultimate with design return periods of 25 and 500 years, respectively, with the possibility of modification for different importance classes similar to EC8. A slightly modified approach is outlined in the recently revised design code in the US, ASCE 7-16 (2016), where the building is designed using a fraction of the maximum considered event (MCE) as input, which is determined from a series of risk-targeted hazard maps developed for a target collapse risk of 1% in 50 years.
The design method employed in seismic design codes follows what may be referred to as force-based design (FBD). It calculates a design base shear force from a reduced elastic spectrum using either the equivalent lateral force (ELF) method or response spectrum method of analysis (RSMA). Despite seismic codes having the option to use non-linear numerical models for static pushover (SPO) analysis or non-linear response history analysis (NLRHA) with a set of suitable ground motion records, these approaches may be deemed too computationally expensive at times and not always implemented given the simpler linear-static options available.
While FBD boasts an attractive simplicity, Priestley (2003) and others pointed out several shortcomings. The use of displacement-based design (DBD) was thus advocated, where deformation demands in the individual elements drive the design process, culminating in the development of the direct displacement-based design (DDBD) method (Priestley et al. 2007) and other similar methods (Sullivan et al. 2003). One of the principal arguments by Priestley et al. (2007) was that it was not reasonable to quantify the expected ductility and spectral demand reduction for different structural configurations via unique behaviour factors and proposed employing a ductility and typology-dependant spectral reduction.
Both FBD and DBD methods can be good approximations for the initial seismic design of structures. However, neither explicitly quantify the structural performance in a manner that may be considered as having fully satisfied the goals of modern PBEE (i.e. the PEER PBEE methodology). This means that the actual performance of structures designed using these methods is not expected to be risk-consistent (i.e. the annual probability of it exceeding a certain performance threshold is not accurately known or consistent among different structures), and building performance parameters like collapse risk, expected economic losses and downtime do not feature in the design process. A recent initiative in Italy (Iervolino et al. 2018) has shown that buildings designed according to the Italian national code (NTC 2018), which is similar to EC8, do not exhibit the same level of collapse safety when evaluated extensively, with large variations observed between different structural typologies and configurations. These FBD and DBD methods’ design solutions may be refined and modified to become more in-line with risk-based objectives, as discussed in O’Reilly and Calvi (2020), or the behaviour factors adopted for different structural typologies may be adjusted and refined (Vamvatsikos et al. 2020), for example. Nevertheless, the fundamental issue of modern PBEE not being at the core of these classical methods remains.
2.2 Recent risk-targeted approaches
Over the years, different design methods aimed at risk-targeted have been developed and are widely accepted to eventually be prescribed and recommended in future design codes (Vamvatsikos et al. 2016; Fajfar 2018). The US has already implemented criteria in the seismic design code ASCE 7-16 (2016) and FEMA P-750 (2009b), and the new draft version of EC8 (CEN 2018) will include an informative annex on the probabilistic verification of structures. Any risk-targeted approach aims to control the risk of exceeding a limit state related to the performance of the building. Several methodologies to design structures with sufficient collapse safety are considered and are briefly mentioned before critically reviewed together with the proposed method in Sect. 4.
The concept of risk-targeted behaviour factors (RTBF) was developed based on the works of Kennedy and Short (1994) and Cornell (1996), whereby behaviour factors are adjusted and revamped using more risk-consistent approaches. Procedures like FEMA P695 (ATC 2009a) and recently by Vamvatsikos et al. (2020) outlined such approaches. Luco et al. (2007) introduced the concept of a risk-targeted design spectra to ensure uniform collapse risk for structures in the US. Douglas et al. (2013) and Silva et al. (2016) explored the extension of such an approach to Europe. Vamvatsikos and Aschheim (2016) further developed the yield point spectrum method by Aschheim and Black (2000) and introduced the yield frequency spectra (YFS) as a design aid to link the MAFE of any displacement or ductility-based parameter with the system design strength. Additionally, Žižmond and Dolšek (2019) introduced the risk-targeted seismic action method to be integrated with the current FBD procedures in EC8. Krawinkler et al. (2006) also introduced an iterative approach, where effective structural systems are selected and sized and the performance of structural, non-structural, and content systems is evaluated for each. This approach utilises acceptable loss and collapse risk for decision-making to intuitively aid designers when implementing the PEER PBEE framework in design. These aforementioned studies are not intended to be an exhaustive list of available methods but rather some of the noteworthy proposals to integrate modern PBEE in seismic design.
3 Proposed integrated performance-based seismic design (IPBSD)
3.1 Overview
A novel conceptual seismic design framework that employs expected annual loss (EAL) as a design metric and requires very little building structure information at the design outset was developed by O’Reilly and Calvi (2019) and forms the basis of the proposed approach. It centres around defining a limiting value of EAL and identifying structural solutions through simplified hand calculations. Several assumptions were made to relate the performance objectives to a design solution space, which serves as an initial screening before detailing the structural members. Storey loss functions (SLFs) were used to relate expected loss ratios (ELRs, y) to engineering demand parameters (EDPs). A serviceability limit state (SLS) and ultimate limit state (ULS) were considered to characterise the structure’s elastic and ductile behaviour (Shahnazaryan et al. 2019), respectively, in line with current code prescriptions.
The proposed framework outlined herein uses mean annual frequency of collapse (MAFC), λc, to directly ensure an acceptable level of collapse safety and an EAL limit, λy,limit, to mitigate excessive monetary losses. Both are set by the designer based on the desired building performance. The target MAFC, λc,target, is set and used to limit the actual λc described by:
and the λy,limit limits the λy described by:
This integrated consideration of building performance in a risk-consistent manner represents a positive step for future revisions of design codes in line with the goals of modern PBEE.
3.2 Step-by-step implementation of the proposed IPBSD framework
A step-by-step guide to the proposed IPBSD framework is outlined herein. It is described with reference to an RC frame, although the framework may be extended to other structural typologies. It comprises four phases:
-
1.
Definition of performance objectives (Fig. 1);
-
2.
Identification of feasible initial period range (Fig. 2);
-
3.
Identification of required lateral strength and ductility capacity (Figs. 3, 4);
-
4.
Design and detailing of structural elements (Fig. 5).

Phase 1 of the proposed framework, where the loss curve is constructed and SLS performance objectives established to limit EAL

Phase 2 of the proposed framework, where design spectrum and acceptable design limits at SLS are identified, leading towards the establishment of the feasible initial period range

Illustration of the SPO backbone response parameters and the various approaches to identify the design value

Phase 3 of the proposed framework, where the collapse capacity and backbone curve of the solution is identified

Phase 4 of the proposed framework, where the demands on the structural elements are identified and detailing of sections is carried out
3.2.1 Phase 1: definition of performance objectives
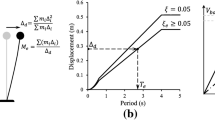
In the first phase of IPBSD, the aim is to identify a suitable loss curve to limit λy. Performance objectives are characterised through an ELR, y, and MAFE, λ, of each limit state shown in Fig. 1. Three limit states utilised are: fully operational limit state (OLS), which represents the onset of damage and monetary loss and is assumed to be yOLS = 1% at a limit state return period of 10 years; SLS, which is where the economic losses will be controlled through the modification of ySLS; collapse limit state (CLS), where complete collapse (i.e. λCLS = λc) and economic loss of the building (i.e. yCLS = 100%) is expected. With both the OLS and CLS known, a ySLS and λSLS are assigned to SLS in Fig. 1 and the loss curve is identified. O’Reilly and Calvi (2019) have shown that the difference in area between the approximate and refined loss curve shown in Fig. 1 could be over 50%, resulting in a large overestimation of EAL. To overcome the overestimation, they suggested a closed-form fit for the refined loss curve as follows:
where c0, c1 and c2 are the fitting coefficients for the three limit state points. The area under the curve (i.e. the red shaded area) is λy given by Eq. (5), where a trapezoidal rule may be applied and is checked against λy,limit defined initially. SLS’s characteristics, namely ySLS and λSLS, are the variables to be adjusted so that λy is not exceeding λy,limit. The value of λSLS should be in line with current code requirements and the value of ySLS be the parameter adjusted to satisfy Eq. (5).
3.2.2 Phase 2: identification of a feasible initial period range
Phase 2 of the proposed framework identifies a range of possible initial structural periods [Tlower, Tupper]. Using the λSLS identified in Sect. 3.2.1, the design spectrum shown in Fig. 2a can be obtained through an appropriate anchoring of a design spectrum, characterised via PGA, that results in SLS exceedance. A second-order hazard model (Vamvatsikos 2013) is used for the peak ground acceleration (PGA) of this spectrum and is given as:
where k0, k1, k2 are the fitting coefficients, and H(s) is the hazard function representing the MAFE of a certain intensity measure (IM), s, equal to PGA in this case, obtained from probabilistic seismic hazard assessment (PSHA). The hazard level corresponding to λSLS, is determined by solving for HSLS in the following expression (Vamvatsikos 2013):
where βSLS is the dispersion anticipated at the SLS, which could be taken as 0.20 and is within the bounds of the recommended values of Appendix F of the recent draft of the revised EC8 (CEN 2018). Knowing the hazard level, the PGA of SLS is calculated by simply inverting Eq. (6) as:
and the uniform hazard spectrum (UHS) for SLS is obtained (Fig. 2a).
Control in the context of economic losses is established by limiting structural demands at the SLS. This means limiting displacement and acceleration demand on the structure for the design SLS spectrum identified. Using storey loss functions, acceptable structural demand limits are identified, as illustrated in Fig. 2b. As further described by O’Reilly and Calvi (2019), relative weights or contributions of different damageable groups to expected loss, Y, at the SLS are required. The ELR at SLS, ySLS, is therefore broken down as:
comprising peak story drift (PSD) sensitive structural, yS,PSD, and non-structural, yNS,PSD, elements, and peak floor acceleration (PFA) sensitive non-structural, yNS,PFA, loss contributions. These may be computed as a product of target ySLS and its relative weighting Y by the following expressions:
By entering the vertical axis in Fig. 2b with the respective value of yS,PSD or yNS,PSD, the more critical maximum PSD, θmax,SLS, and the maximum PFA, amax,SLS are obtained. These multi-degree of freedom (MDOF) demand limits are then converted to single-degree of freedom (SDOF) spectral displacement, Δd,SLS and spectral acceleration, αd,SLS limits. Similar to the approach adopted in DBD (Priestley et al. 2007), the spectral displacement limit is computed as:
where n is the number of storeys, mi is the floor mass and Δi is the first mode-based displaced shape of the RC frame at storey level i, but other typologies can be considered (Priestley et al. 2007), ωθ is the higher mode reduction factor and Hi is the i-th storey’s elevation above the base. Unlike PSD, the maximum PFA along the height, amax, cannot be assumed to be first-mode dominated. Here, a simplified assumption is made, where the transformation coefficient is assumed as 0.6, based on the findings of O’Reilly and Calvi (2019) (Eq. (13)). Further refinements have (Silva 2020) and are being currently been investigated for transformation coefficients of different structural typologies.
Based on these design spectral limits, a period range bounded by the lower, Tlower, and upper, Tupper, limits is identified (Eqs. (14) and (15)), within which the fundamental period of the structure, T1, must be (Fig. 2c). Having a structure whose period falls in this range should ensure that the building is neither too stiff, which would result in excessive floor acceleration-sensitive losses, nor too flexible, which would give excessive drift-sensitive losses, at the SLS. Meeting these conditions aims to ensure that the EAL limits discussed in Phase 1 are respected.
3.2.3 Phase 3: identification of required lateral strength and ductility
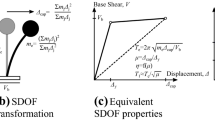
Having identified the feasible initial period range to limit economic loss at SLS, it is equally important to control the risk of structural collapse. Unlike the previous iteration of the framework (O’Reilly and Calvi 2019), the direct consideration of ULS is replaced with CLS, and a MAFC is targeted by Eq. (2). A period between Tlower and Tupper is selected and the expected backbone behaviour and overstrength qs are first trialled by the designer. SPO parameters are assumed, such as the spectral acceleration at yield, Say, the fundamental period T1, hardening and fracturing ductilities, μc and μf, hardening ratio to peak, Kh and post-peak softening ratio, Kpp, and residual strength, r (Fig. 3). For the initial estimation of these parameters, several suggestions from the literature may be employed. For example, μc may be initially estimated based on the behaviour factors given in current codes; μf will depend on the post-peak capping rotation capacity of the RC frame members, which could be based on work by Haselton et al. (2016), for example. An r value of around 10–20% of Say and Kpp could be within a range of 20–30% to start, but both should be based on pushover analysis or experimental testing when available. All of these parameters may be adjusted based on expert judgement by the designer and since they are structural capacity proportions and should not be too challenging to estimate and quickly refine without any excessive analysis being required.
The SPO2IDA tool (Vamvatsikos and Cornell 2005) is used to estimate the collapse fragility function of the structure in terms of median collapse capacity, Sac, and record-to-record (RTR) uncertainty, βRTR, assuming a lognormal distribution. In essence, the SPO2IDA tool offers a quick estimation of the incremental dynamic analysis (IDA) response (i.e. the blue curves in Fig. 3), which represent the intensities required to exceed displacement-based limit-states of a structure characterised by an SDOF system with a quadrilinear SPO curve (i.e. the black backbone curve shown in Fig. 3). It utilises R-μ-T relationship, developed through extensive dynamic analyses on SDOF oscillators (Vamvatsikos and Cornell 2005) and removes the need of performing multiple dynamic analyses on the trialled backbone behaviour. The identified backbone shape in Fig. 3 and a trialled lateral strength Say is used to find the ductility-based force-reduction, qμ and βRTR, using the SPO2IDA tool as:
For proper evaluation of collapse capacity, through square-root-of-sum of squares (SRSS) combination, modelling (and possibly other types) uncertainty needs to be accounted for (Eq. (17)).
qμ is transformed to the spectral acceleration Sa of the actual MDOF system using a transformation factor, Γ, as follows:
where φ is the fundamental mode shape, which can be taken as the normalised displaced shape (Eq. (12)). The collapse fragility function is then integrated with the hazard curve corresponding to the selected T1, H(Sa(T1)), identified from PSHA and λc is computed (Fig. 4a) by Eq. (20). The λc computed from the trialled value of Say and the assumed backbone shape is verified against λc,target. If the condition is met and the value is sufficiently close to the target, the designer may proceed. Otherwise, the trialled yield properties of the frame and/or ductility should be revised. By varying T1 and repeating the process, a capacity curve of uniform collapse risk can be plotted in Sa versus Sd, which identifies where the feasible structural solutions are to be found (shaded in red in Fig. 4b). The red dots in Fig. 4b represent several feasible design solutions within the period range and with a strength capacity that satisfies the collapse safety criterion, meaning that any structure with the T1 in this range and a lateral capacity on the curve should be sufficient.
3.2.4 Phase 4: design and detailing of structural elements
The final phase (Fig. 5) uses the identified required capacity to size the structural elements. Design base shear, Vd, based on the identified Say is given by Eq. (21), which depends on the first-mode effective mass, M* (Eq. (22)) and the assumed value of system overstrength, qs. It is necessary to include a reduction for the anticipated overstrength such that the resulting structure will have and actual yield strength of Say and thus a collapse risk of λc, as anticipated by the performance objectives depicted in Fig. 3.
Based on Vd, the lateral distribution of forces may be obtained and is used to identify demands on structural elements, given as:
At this point, any structural member detailing requirement from seismic design codes may be applied to determine the member dimensions and required reinforcement content. Strength hierarchy and local ductility requirements should be accounted for. Of equal importance are higher mode effects and second-order effects (P-Delta). The former one may be accounted for through a higher mode reduction factor for the possible storey drift amplifications and P-Delta effects may be considered through stability checks similar to EC8 (CEN 2004b), for example. The structural element cross-section and material properties should be selected to remain within a reasonable tolerance of the assumed T1 selected during the collapse safety verification phase. If this condition is met and the structure’ capacity curve matches that of the assumed in Fig. 3, the identified structural configuration may be adopted. Otherwise, the element dimensions and reinforcement ought to be revised. It is noted, however, that any iterations required in IPBSD are limited to spreadsheet adjustments and extensive analysis verifications are not required.
4 Discussion of performance-based seismic design methods
With the brief overview of existing seismic design methods in Sect. 2 and the proposed method in Sect. 3, a critical discussion is provided here. Table 1 shows several designs method with the following abbreviations: IPBSD proposed here; FBD present in many seismic design codes (CEN 2004b; NZS 1170.5: 2004; ASCE 7-16 2016; NTC 2018); DDBD outlined by Priestley et al. (2007); RTBF described by Cornell (1996), amongst others; conceptual performance-based design (CPBD) proposed by Krawinkler et al. (2006) Zareian and Krawinkler (2012); risk-targeted spectra (RTS) proposed by Luco et al. (2007); YFS proposed by Vamvatsikos and Aschheim (2016); and the risk-targeted seismic action (RTSA) method comprising both the direct (D) and indirect (I) approaches by Žižmond and Dolšek (2019). This list is not intended to be exhaustive but instead attempts to give an overview of the prominent methods currently available in research and practice.
The rows of Table 1 list several categories common to each seismic design method. These are abbreviated and described as follows: performance objective(s) (PO), which describe the primary quantity that each design method targets, limits or bases itself upon; seismic hazard (H) definition, meaning how seismicity is characterised in the design process; non-linearity (NL) meaning how ductile structural behaviour is accounted for to adequately determine a suitable set of reduced design forces; relative difficulty and directness (DD) meaning how difficult (i.e. is the method feasible with just a spreadsheet or is extensive NLRHA required?) and direct (i.e. are multiple iterations required to obtain the final solution?) the method is; (PBEE) whether or not the method is risk-consistent; and the flexibility (FLX) of the method meaning how easy is it to tailor the design targets beyond what it has been developed for so far.
The first comparative point concerns the POs. Beginning with FBD, the PO is related to the expected (or average) values of displacement, D, and lateral resistance, R, at specified return period, TR, intensities. This requires a designer to ensure sufficient lateral strength at very rare TR events, whilst limiting the expected displacement at frequent TR events. DDBD follows a similar approach whereby the expected level of displacement demand at multiple TR levels is used. This is quite typical of design codes, whereby a series of intensity-based checks with corresponding limit states are stipulated for practitioners to follow and verify. This essentially stemmed from the early interpretation of PBEE in Vision 2000 (SEAOC 1995).
As research grew on probabilistic-related aspects, it became clear that such an intensity-based approach may not be entirely appropriate for modern PBEE (Günay and Mosalam 2013) and structures designed this way did not provide the consistent level of safety they were perceived to have (Iervolino et al. 2018). This led to developments on how these approaches may be improved but maintaining the same intensity-based approach familiar to practitioners. RTS, RTBF and RTSA-I are examples of such developments, where some behind the scenes adjustments are made to maintain the familiar intensity-based approach via a UHS while seeking to maintain risk-consistency among designs. They typically have collapse safety as their PO but differ slightly in their definitions of it. For example, to identify suitable behaviour factors to reduce the UHS in design, FEMA P-695 (ATC 2009a) employs a collapse margin ratio (CMR, see Fig. 3), whereas a recent proposal by Vamvatsikos et al. (2020) for Europe employed λc.
YFS provides a way to identify structures that can limit the MAFE of deformation-based quantities like storey drift, θ, or ductility, μ. CPBD was a proposal that was in some ways ahead of its time as many of the tools needed to feasibly implement it were either not available, or yet to be developed. It discussed using an array of POs in its formulation and made an effort to illustrate these quantities for designers to understand. Further development of this approach by Zareian and Krawinkler (2012) utilised a storey-based approach with POs being defined as expected losses and collapse probabilities at specified intensities. This is one of the few methods that has attempted to directly incorporate economic losses into its formulation, although the manner in which it was framed appeared rather tough to practically implement at the time. The last is the proposed IPBSD approach where the POs are the λc and the λy to target a certain collapse risk but also to limit the expected economic losses over all intensities, as initially proposed by O’Reilly and Calvi (2019). It is seen that the collapse risk objective is in line with other methods but the relatively simple integration of EAL as a design variable makes it an attractive option. This was a key point highlighted by Krawinkler et al. (2006), stating that performance-based designs are not readily condensable to a single design parameter but multiple parameters that affect different facets of response; for example, should the building possess insufficient strength and ductility, its collapse safety may be inadequate, whereas should it be too flexible, it may accumulate excessive drift-sensitive loss at low TR events, but at the same time potentially accumulate too much acceleration-sensitive if too stiff. It was for this reason that O’Reilly and Calvi (2019) introduced the restriction of the initial period range and the subsequent identification of sufficient lateral strength and ductility.
The next broad comparison is the manner in which they define seismic hazard. Traditional methods like FBD and DDBD rely on the use of a UHS at specified TR levels. These UHS are anchored to some level of ground shaking computed using PSHA. In the case of EC8, PGA on rock is used and a predefined shape for all other periods at that TR is fitted. It should be noted that while the use of specific TR levels may not be ideal, neither is anchoring the shape of the entire design spectrum to a single parameter like PGA, as recently discussed by Calvi et al. (2018). The main problem with using a UHS is that in order to make the resulting design solutions risk-consistent, they need to either have some modifications made in how they are utilised or how they are defined. For example, RTS attempts to define the anchoring value of a UHS whereas RTSA-I instead modifies how the force reduction is introduced. Alternatively, there is the use of seismic hazard curves determined from suitable PSHA, and are generically defined as H(IM), noting that different IMs may be used. The most common hazard curve definition is at the first mode period of vibration of the structure, H(Sa(T1)), which is employed by YFS, RTSA-D, RTSA-I and also IPBSD. The proposed method utilises several hazard curves defined within a range of feasible periods of vibration and not one specific value giving a degree of flexibility of final structural configuration when identified and sized. Other methods focus on the identification of a singular T1 assumption for design which needs to be then iterated should the actual value not match. It is also noted how the RTBF quantification approach described by Vamvatsikos et al. (2020) for Europe utilises a more advanced IM definition of average spectral acceleration (Eads et al. 2015), H(AvgSa), to characterise suitable behaviour factors.
In terms of how each method deals with non-linearity, FBD uses the traditional approach of behaviour factors for each structural system whereas other methods like RTBF have attempted to correct the definition of these to be more risk-consistent. However, the underlying assumption of a single force reduction factor for certain typologies remains. RTS as defined in ASCE 7-16 (2016) also utilises force reduction factors but as pointed out by Gkimprixis et al. (2019), this use of traditional behaviour factors means that the risk-consistency breaks down in this implementation of RTS. The RTBF approach attempts to rectify this inconsistency through appropriate behaviour factor calibration. DDBD utilises the concept of equivalent viscous damping, which is somewhat similar to behaviour factors but different because the spectral reduction is a function of the expected ductility demand rather than a fixed value. CPBD utilised a rather strenuous approach of multiple NLRHA for identification of suitable designs. The RTSA methods proposed by Žižmond and Dolšek (2019) account for non-linearity by assuming a set of values for the expected ductility capacity at near collapse, μNC, and overstrength of the structure, rs, which are later verified for the subsequent design and iterated if needed. An additional C1 parameter is also computed via an IDA analysis on an equivalent SDOF oscillator. It is worth noting that for the RTSA-I method, Žižmond and Dolšek (2019) describe how an equivalent risk-consistent behaviour factor may be identified, highlighting the link between it and other methods discussed here. To circumvent the use of assumed values for force reduction and subsequent verification, YFS and the proposed IPBSD method both utilise the SPO2IDA tool (Vamvatsikos and Cornell 2005) to compute the force reduction distribution directly. This tool relates the distribution of dynamic behaviour to the expected backbone shape of the structure using an extensive library of empirical coefficients calibrated using NLRHA. This has the advantage of allowing the dynamic behaviour to be estimated with a high degree of accuracy prior to designing the structure without any numerical analysis.
Regarding the relative difficulty and directness of each method, a generic ranking has been provided based on the authors’ subjective opinion. Due to their direct nature and no essential requirement to iterate design solutions or conduct extensive dynamic verifications, the FBD, DDBD, RTBF and RTS methods are ranked as easy methods to implement. The CPBD method is ranked as very extensive due to the sheer amount of analysis required to implement it. The YFS and IPBSD methods are ranked as moderate as they do not require any dynamic analysis to implement. If the designer is confident in SPO2IDA tool’s ability to characterise the dynamic behaviour of the structure then no great difficulty is encountered. Small iterations may be needed to refine the solution, with some being refined to a spreadsheet whereas others require pushover analysis of numerical models. The RTSA methods are denoted as extensive by requiring an IDA on an SDOF oscillator to determine one of the design parameters. Designs may take a few iterations, with full numerical models being required. The authors of this approach have, to their credit, provided ample parametric studies and practical guidance for designers (Sinković et al. 2016) on how to tackle this aspect and good initial assumptions can easily be made, still making it an attractive option.
In terms of flexibility of tailoring the design targets, the methods using behaviour factors (FBD and RTBF) are relatively limited since their performance is inherently linked to the assumption made in the derivation of the behaviour factor and no end-control is left to the designer. DDBD’s use of equivalent viscous damping makes it somewhat more flexible as it allows designers to tailor their intensity-based drift limitations. The assumptions needed to derive RTS have been discussed by Gkimprixis et al. (2019) to not be without their difficulties as to how the general method ought to be employed and the spectra derived with different studies advocating different anchoring values of the parameter X (Douglas et al. 2013; Silva et al. 2016). All other methods are deemed as flexible as they let designers choose and tailor their specific design targets, increasing their appeal.
Lastly, Table 1 categorises the different methods as being PBEE-compliant or not. While this is not a new discussion (e.g. Vamvatsikos et al. 2016), it is included here for completeness. Unsurprisingly, neither FBD nor DDBD meet modern PBEE goals, at least without some additional verifications (e.g. O’Reilly and Calvi 2020). Again, RTS fails this categorisation not because of a conceptual flaw but rather in how it has come to be implemented, as discussed by Gkimprixis et al. (2019). The other methods, including the proposed IPBSD, are all seen to be PBEE-compliant as their formulations directly incorporate the use of risk-oriented metrics implemented consistently.
5 Case study application
5.1 Definition of case study buildings
To assess the performance of the existing methods compared to the proposed one, several case study applications were carried out. Ten archetypical buildings were examined and are described in Table 2. The designs vary in terms of number of storeys, number of bays, storey heights and bay widths, in addition to design targets. Office occupancy was assumed for each and the SLFs provided by Ramirez and Miranda (2009) for this occupancy type were selected.
The value of λy was selected to a rating higher than “A” as classified by Cosenza et al. (2018) with values lower than 1%. As pointed out by Cook et al. (2019), damage in high-rise structures tends to concentrate on just a few storeys, greatly reducing the loss with respect to the total building value. In contrast, damage in shorter structures tends to be more spread across all storeys. Additionally, Ramirez et al. (2012) and Calvi et al. (2014) noted a trend whereby increasing building height results in decreasing normalised loss ratios and EAL. From this, one could argue that for taller structures, the λy is expected to reduce, hence the reduction of the limiting value for the taller case studies examined here. With regards to the selection of λc,target, there is yet to be a widespread consensus on which value should be used in new design. For example, ASCE 7-16 (2016) has an acceptable national risk of 1% in 50 years (λc = 2.0 × 10−4), while several studies from the literature (e.g. Duckett 2004; Goulet et al. 2007; Fajfar and Dolšek 2012) note values of around λc = 1.0 × 10−5 as reasonable. Furthermore, Silva et al. (2016) utilised λc = 5.0 × 10−5 whilst discussing the development of risk-targeted hazard maps for Europe and a review by Dolšek et al. (2017) noted typical limits are between λc = 10−4 and 10−5. Using these values from the literature, and also to highlight the possibility of easily tailoring the design performance objectives in the proposed method, two λc,target values of 5.0 × 10−4 and 1.0 × 10−4 were adopted.
Typical plan and elevation illustrations are shown in Fig. 6. The gravity loads, including imposed and dead loads, were assumed 6 kN/m2 and 5 kN/m2 at the general floor and roof level, respectively. A stiff clay site according to EC8’s site classification (CEN 2004b) located in L’Aquila, Italy was chosen for all design cases. The structural system was a RC moment-resisting frame. The material properties used in the design and detailing were 25 MPa for the concrete compressive strength and 415 MPa for the steel yield strength. No plan or elevation irregularities were considered. 2D planar models were used given the symmetric structures with no irregularities. Alternatively, the framework should be applied in both directions of the structure bearing in mind that some considerations need to be applied for calculation of losses, which are not addressed herein. For simplicity, one direction of seismic action was considered.

Illustration of plan layout and elevation of archetypical RC frames in a discussion (tributary area of gravity loads on seismic frames shaded grey)
5.2 Numerical modelling
For each design method and case study archetype, numerical models of the systems were generated using OpenSees (McKenna et al. 2010; Mazzoni et al. 2006) for subsequent design verification. SPO and NLRHA were performed to assess the seismic performance of each case. The masses were lumped at each floor and the nodes were constrained in the horizontal direction to mimic a rigid diaphragm behaviour (Fig. 7a). Non-linear element behaviour was considered through a concentrated plasticity approach developed by Ibarra et al. (2005) (Fig. 7b). P-Delta effects were accounted for through gravity columns, and the columns of the lateral force-resisting system were fixed at the base. Rayleigh damping was implemented with 5% of critical damping assigned to the first and third modes. For the plastic hinge models, element moment–curvature relationships were attained through Response-2000 sectional analysis program (Bentz 2015), which followed the concrete and reinforcement material properties of EC2 (European Committee for Standardization (CEN) 2004a). The backbone curve used is described by the parameters: elastic stiffness defined through the elastic slope, ae,ϕ, yield strength, My, yield curvature, ϕy, strain-hardening stiffness through hardening slope, ap,ϕ, capping curvature, ϕp, defined through hardening ductility, μc,ϕ, which corresponds to the peak strength, Mp, of the load-deformation curve. The softening branch is defined by the post-capping stiffness defined through softening slope, ac. Finally, a residual strength, r, of the component is defined, which is preserved once a given deterioration threshold, ϕr, is achieved. The fracturing ductility, μf,ϕ, is used to identify a point of fracturing identifying a curvature capacity of the model. Essentially, the backbone curve was fit to the moment–curvature relationship of the element, where μc was selected based on the peak behaviour of the element and r was taken as 20% of My. The softening slope of the backbone curve was selected, so that the post-capping chord rotation capacity did not exceed 0.10, as per Haselton et al. (2016); the post-capping curvature capacity, ϕpc, may be obtained by taking the ratio of this to the anticipated plastic hinge length, Lp, calculated as per (Priestley et al. 2007), for example.

Illustration of the numerical modelling approach, where (left) shows the layout of elements and beam-column connection modelling and (right) denotes the hysteretic model adopted for each hinge location
5.3 Site hazard and ground motions
PSHA was performed using OpenQuake (Pagani et al. 2014) with the SHARE hazard model (Woessner and Wiemer 2005). To characterise the structural response with increasing intensity for each design case, a set of 30 ground motion records were selected from the NGA West-2 database (Ancheta et al. 2014) with each record’s soil type being consistent with that of the site. PSHA disaggregation results at the 2475 years return period and at a period of 0.7 s, around which the majority of the case study RC frames’ T1 fell, were used to select the records. Hazard curves obtained from PSHA were used in each design procedure under consideration. For the proposed framework, the initial definition of a target loss curve and identification of a suitable PGA value for the SLS was needed. Furthermore, once the acceptable period range for the structure was identified, λc,target was verified by integrating the collapse fragility with the seismic hazard based on an IM of Sa(T1) for a range of T1 values. Žižmond and Dolšek (2019), on the other hand, use a 1st order fit of Sa(T1) using the return periods of 475 and 10,000 years. The slope of the first-order model in the log–log domain was used to calculate the collapse intensity and the risk-targeted design spectral acceleration. For EC8 and DDBD cases, an elastic design spectrum was used. To be consistent with the seismic hazard used for the other methods, the Sa(T1) value of the elastic design spectrum defined was scaled to match that obtained from PSHA. This essentially meant that the EC8 design spectrum was anchored to a hazard consistent value of Sa(T1) rather than PGA on rock, as is typically recommended. The seismic hazard corresponding to a period of 0.7 s and 1.0 s are presented in Fig. 8. For the 2nd order hazard, least-squares fitting was used with higher weight given to medium to higher intensities, i.e. larger than Sa(T) = 0.1 g, where the collapse behaviour is more relevant for capturing λc, while for PGA intensity, higher weight was given to lower to medium intensities, where λy calculation is more relevant.

Seismic hazard with 1st and 2nd order fits corresponding to a spectral acceleration at a period of 0.7 s, 1.0 s and PGA
6 Design of case study structures
The study aims to examine different methodologies for designing structures described in Sect. 5.1. In this section, the proposed IPBSD was implemented in addition to FBD as outlined in EC8, RTSA-D and RTSA-I by Žižmond and Dolšek (2019); the RTS approach by Luco et al. (2007) and DDBD as per Priestley et al. (2007). The RTBF, CPBD and YFS approaches were not applied here mainly in the interests of space but also for the following reasons. RTBF represents a general approach to update and correct behaviour factors used in design and to the authors’ knowledge, none have been formally proposed for RC frame structures in Europe which would have allowed implementation here, although the studies previously discussed in Sect. 4 have indicated how they may be computed in future studies. CPBD was not studied here due to the sheer amount of analysis and iteration required to apply it. It was noted in Sect. 4 that one difficulty of CPBD was that it lacked the simplified tools to practically implement it. In this regard, the proposed IPBSD may be seen as a successor to this method, as the design objectives are similar but much of the heavy analysis work has been substituted with appropriate simplifications and tools for a more expedite design process. Lastly, YFS was also not considered because, if its performance objectives were changed from exceedance rates of multiple drift- and ductility-based conditions to the global collapse condition, the results would closely resemble those from Phase 3 of the proposed IPBSD method.
The objective was to examine contemporary methods of risk-consistent design in addition to code-based formulations. The RTS and DDBD approaches were examined up to the point of establishing a design strength and how it varies with respect to the other methods in the interest of space limitations. The same general approach to design was followed for each structure with the required lateral design strength identified and designed for. The case study structures were subsequently detailed and sized following the EC8 and EC2 member detailing requirements and a numerical model was built using the approach described in Sect. 5.2, to be evaluated in Sect. 7.
6.1 FBD according to EC8
The archetypical RC frames described in Table 2 were designed following the EC8 provisions. The design response spectrum provided by EC8 was used and scaled to match the Sa(T1) value from the PSHA at the no-collapse return period of 475 years. Since EC8 does not utilise λc in its design formulation, the values of λc,target specified in Table 2 were not considered directly. To distinguish between buildings with differing levels of safety, EC8’s importance classes were utilised. Therefore, buildings with λc,target = 5.0 × 10−4 and 1.0 × 10−4 were taken here approximately corresponding to importance classes II and III and the design spectrum was subsequently scaled by 1.0 and 1.2 to account for this, respectively.
The ELF method of analysis was employed to determine the demands on the structural elements and two sets of designs were considered: with and without the consideration of the gravity load combination. This was done to clearly identify the level of safety strictly provided by the ELF method’s design resistance. Lateral drift limitations and P-Delta effects were satisfied and the member reinforcement content and dimensions were selected to be within the recommended local ductility limits for ductility class medium (DCM) frames. Cracked cross-section properties (i.e. 50% of gross) were used to identify the demands and design the structural elements. Adequate strength hierarchy (i.e. capacity design) requirements were also met. The period of the frames was identified via an iterative design procedure, where an initial T1 = 0.7 s to match the period of the hazard curve was used. If this assumption was not satisfied and element cross-section properties needed revisions, T1 was updated. The final design values are listed in Table 3.
6.2 DDBD
The design cases of Table 2 were designed using DDBD (Priestley et al. 2007) and are presented in Table 4. The aim was to have a comparative basis among the design spectral accelerations between different methods of design. Similar to FBD, the values of λc,target specified in Table 2 were not directly incorporated and EC8 importance classes were considered instead.
The same elastic spectrum was utilised and scaled to match the Sa(T1) of the seismic hazard. ASCE 7-16 (2016), for example, provides drift limit of 4% to 5% depending on the number of storeys, while Gokkaya et al. (2016) suggest a more stringent value of 3% at MCE intensity level. Taking into consideration the TR of 2475 years of MCE and TR of 475 years used here, the drift limit was assumed to be 2.5%. The Sad values in Table 4 appeared slightly higher to the ones obtained via the FBD approach in Table 3. The design μ, were generally lower than the ones used when designing the EC8 cases. Consequently, this will have compensating effects towards slightly higher Sad.
6.3 RTSA method
The next approach considered was the RTSA method proposed by Žižmond and Dolšek (2019) and both RTSA-D and RTSA-I formulations were employed. Since the approach is risk-targeted, it is more in line with design objectives (e.g. λc,target). Following the method’s step-by-step formulation, the risk-targeted design spectral acceleration, Sad, was estimated.
Scenarios following the RTSA-D formulation were subdivided into two subcases based on the assumption of the rs and μNC to the no-collapse (NC) limit state, which are illustrated in Fig. 3. Cases A considered rs = 1 and μNC = 3, whereas cases B considered rs = 2 and μNC = 6; the latter pair correspond to those used in the design example by Žižmond and Dolšek (2019). Case A values were selected to be more in line with the structural capacity in the absence of any additional gravity load consideration or significant overstrength. Additionally, an initial choice of T1 is needed for both formulations. Where this assumed period substantially differed to the numerical model, it was updated and the design recomputed for all RTSA-D cases but only some RTSA-I cases. These different combinations are listed in Table 5.
For both formulations, λc,target, was set and the seismic hazard described in Sect. 5.3 was used depending on T1. The value of design spectral acceleration, Sad (Fig. 3), was determined by setting βRTR to the suggested value of 0.4 and identifying a median collapse intensity, SaC, that satisfied λc,target when integrating in Eq. (2). An acceptable median spectral acceleration for the NC limit state, SaNC, was calculated as the ratio between SaC and the limit-state reduction factor, γls, taken from Dolšek et al. (2017) as 1.15. Sad was determined using the reduction factor, rNC, as illustrated in Fig. 3, where rNC was determined by:
where C1 is the inelastic deformation ratio relating the inelastic and elastic deformation at SaNC. To compute C1, an SDOF oscillator model with equivalent period and first mode mass was required and analysed with the aforementioned set of ground motions using IDA, as suggested by Žižmond and Dolšek (2019).
RTSA-I cases use a risk-targeted safety factor, γim, (Dolšek et al. 2017) given by:
where k is the slope of the 1st order hazard function in the log–log domain (Fig. 8). The risk-targeted reduction factor, qa, used in this formulation was then computed from:
For the reference seismic design action, Saref, a return period of 475 years was assumed and the Sa(T1) was divided by qa to give Sad. The design spectrum was then obtained by normalising the EC8 elastic spectrum to Sad to implement the RMSA. Both formulations involved an iteration based on the modification of T1 and cross-sections and re-running of the SDOF model to identify the C1 ratio.
Contrary to RTSA-I cases, where results were generally consistent, the design solutions obtained for the RTSA-D cases exhibited some atypical values (Table 5). This was particularly true for the increase in the assumed values of rs and μNC in cases B, which resulted in lower design demands on the structural elements. These high rs and μNC values led to a higher value of rNC, as per Eq. (24), which resulted in much lower Sad, as illustrated in Fig. 3. Conducting elastic analysis on a structural model with this lower design demand led to subsequent iterations of structural element dimension reductions in order to meet the local member ductility requirements. This in turn increased the T1 of the structure, as seen for cases 9 and 10 of RTSA-D TB, for example. This highlights the importance not only of strength and ductility in design but also of sufficient stiffness for lateral systems.
6.4 Proposed IPBSD formulation
The proposed IPBSD framework presented in Sect. 3.2 was implemented and detailed following the EC8 and EC2 provisions. To illustrate, a single design scenario (Case 4) was selected and is described step-by-step herein. It is recalled that λc,target and λy,limit were 1.0 × 10−4 and 0.65%, respectively.
The first phase of the framework involved the definition of performance objectives following Sect. 3.2.1. The y values of OLS and CLS were fixed to yOLS = 1% and yCLS = 100%, respectively, and λOLS was set as to correspond to a limit state return period of 10 years and λCLS = λc,target, respectively. The SLS parameters were then identified by first setting the ySLS = 6%, and trialling λSLS = 2.07 × 10–2. With these limit state values and resulting loss curve shown in Fig. 9a, the λy was calculated from the refined loss curve using Eq. (5) as 0.65%, corresponding to the limiting value. This choice of SLS parameters requires dedicated attention and further refinement beyond the scope of this work.

a Loss curve and b design spectrum at SLS of design case 4
In phase 2, using λSLS the design spectrum at SLS was identified as per Sect. 3.2.2. βSLS was defined as 0.2 and the hazard fitting coefficients were k0 = 365 × 10–6, k1 = 2.043, k2 = 0.155. The PGA was identified as 0.136 g using Eqs. (6)–(8), based on which a design spectrum at SLS was identified (Fig. 9b) for the identification of a feasible initial period range. Then, the structural and non-structural loss contributions associated with each EDP were examined and limited based on the ySLS previously identified. The SLFs proposed by Ramirez and Miranda (2009), assuming office occupancy for mid-rise structures were adopted (Fig. 10). For simplicity, the loss was assumed to be equally distributed along the height of the building and the relative contributions of the different loss groups, Y, were taken from the relative contributions of each SLF shown in Fig. 10. Given that the summation of each contribution exceeds 100% (Eq. (27)), the ELR associated with the element groups were normalised as shown in Sect. 3.2.2.

Utilisation of the SLFs adopted from Ramirez and Miranda (2009)
Figure 10 presents how limiting EDPs were evaluated. For the PSD-sensitive elements, the most critical one was identified as the non-structural elements with a θmax = 0.42% (Fig. 10b). For the PFA-sensitive non-structural elements, amax was calculated as 0.49 g (Fig. 10c). Following Sect. 3.2.2, the spectral limits for PSD and PFA were computed as Δd,SLS = 3.2 cm and αd,SLS = 0.29 g from Eqs. (11) and (13), respectively. Sdα and SaΔ were retrieved from the SLS spectrum (Fig. 9b) corresponding to the design spectral values and the period range bounds were calculated based on Eq. (14) and (15) as follows:
A T1 = 0.9 s, within the identified period range, was selected as the initial target period of the structure. By ensuring the structure has an initial period in this range, the EAL is expected to be lower than the predefined EAL limit. It is noted that the period range is relatively large, and is due to the level of hazard and limiting loss at SLS not being critical with respect to each other. Had a stricter EAL limit been imposed, the spectral limits would have reduced and the feasible period range would have tightened; likewise, had the seismicity increased and the SLS spectra ‘grown’ outwards, the period range would also have tightened. Future research will explore this aspect further.
The third phase of the formulation involved controlling collapse safety. Several assumptions were needed to utilise the SPO2IDA tool (Vamvatsikos and Cornell 2005) regarding the structural system’s expected SPO behaviour. Following the suggestions outlined in Sect. 3.2.3, the values shown in Fig. 11 were adopted. For the sake of comparison with other presented formulations, only βRTR was considered for what concerns uncertainty. The collapse fragility was calculated based on the 50th percentile as the median and the βRTR based on the percentile values shown. Following Eqs. (16)–(20), the Say was optimised to 0.37 g for the case 4 structure, meaning that λc equated λc,target.

SPO and IDA curves attained via the SPO2IDA tool
Following Sect. 3.2.4, with the identified Say, assuming an initial overstrength qs of 1.0, the design base shear was calculated with Eq. (21). The design lateral forces were obtained using Eq. (23) and the ELF method was performed to compute member design forces. Strength hierarchy, local ductility requirements and P-Delta effects were all accounted for following the EC8 (CEN 2004b) recommendations and structural elements were verified via their moment–curvature relationships using Response-2000 (Bentz 2015) and EC2 (European Committee for Standardization (CEN) 2004a) material properties. It is important to note, that in the event of the actual SPO of the structure changing, the SPO curve in Fig. 11 and qs need to be verified and potentially updated to reflect the actual structural properties. The final design solutions in terms of the T1 and Sad are shown in Table 6.
6.5 RTS approach
The approach proposed by Luco et al. (2007) for risk-targeted spectra relies heavily on the underlying assumptions regarding the choice of the probability of collapse, X, and λc,target with respect to the reference hazard, Href (i.e. 1/475 years), as discussed by Gkimprixis et al. (2019). Here, the risk-targeted spectral acceleration, Sac,X, was computed and then reduced by the code behaviour factor, q, corresponding to EC8’s DCM, to obtain Sad. Table 7 lists the variation of Sac,X depending on λc,target and the assumption of X. It shows high sensitivity towards the underlying assumptions and is noted to be insensitive to the choice of other structural parameters (e.g. typology, number of storeys). The values are more in line with those attained in the previous section when X = 1.0 × 10–1. This was particularly interesting, since λc,target do not correspond to the recommended values of 2.0 × 10−4 and 1.0 × 10−5 of ASCE 7-16 (2016) and Eurocode 0 (EC0) (European Committee for Standardization (CEN) 2012), respectively. These observations are possibly due to the indirect assumption of Href, where Gkimprixis et al. (2019) showed a high sensitivity of the Href to λc,target ratio to values of X, dispersion, βRTR, and seismic hazard slope. In other words, depending on which λc,target and Href the designer is using, the recommended values should have also been made using those same values. Following the suggestions of Douglas et al. (2013), Sac,X were recomputed and a large difference was noted. The EC0 assumption of λc is stricter, hence the much higher Sad. The value from ASCE 7-16, where q = 3/2R = 4.5, assuming R equal to 3 for ordinary RC moment frames (ASCE 7-16 2016), is of a similar magnitude. If one were to follow the results of RTS, the RC frame designed for 0.07 g would most likely not meet the collapse safety condition, as the results presented in Sect. 7.1 will later imply. The designs consistent with EC0 and ASCE 7-16 are more reasonable, and much higher than the values of EC8 obtained in Tables 5 and 6, due to the stricter λc,target. Of importance is the fact that the λc,target corresponding to ASCE 7-16 is more lenient as opposed to EC0, and is of similar level with respect to previously attained values through risk-targeted approaches. However, the lack of design flexibility and disregard towards other characteristics of the building (i.e. number of storeys, typology etc.) should not be neglected.
6.6 Summary
For a brief comparison of the case study designs in the previous sections, the Sad values obtained from each method are presented in Table 8. A disparity is apparent among the risk-targeted and non-targeted approaches. These latter cases tend to be an order of magnitude higher, albeit with shorter periods. A notable exception is the RTS approach (X of 1.0 × 10−5, β of 0.5, q of 3.9 and T1 taken as the FBD cases), which is lower than the others and is most likely due to the inconsistencies in assumptions made while applying the method here, as mentioned above. It is noted that the DDBD and RTS design solutions are not examined further in the interest of space limitations. It is envisaged that due to their relative similarity in terms of Sad and T1 with the FBD solutions, that the range of collapse risk values found for these will be generally applicable to each of these methods. Further analysis showed that this was indeed the case. Of note are the low values of Sad associated with methods like EC8 and RTS for some cases when compared to other methods. This is a reflection of the corresponding high T1 values of these cases, where the design lateral demands reduced due to the higher flexibility of these structures. It is important to note that for EC8, for example, the design T1 was a parameter that was initially estimated and refined without any constraints. This meant that structures could end up very flexible but still respect the seismic design requirements set out, as was the case here. However, it is important to note that design methods such as EC8 would also have other requirements such as wind and snow loads, amongst others, to take into consideration and would likely affect the final stiffness of the building. These were not considered here in order to isolate and examine the specific outcomes of the seismic design approach without any other non-seismic constraints masking the results obtained.
7 Analysis results
Each case study design was modelled as described in Sect. 5.2 and IDA was performed to characterise the structural behaviour up to lateral collapse using the ground motions described in Sect. 5.3. With this, the actual λc with respect to the λc,target is assessed to evaluate each method in delivering sufficiently safe and uniform risk design solutions. The λc values were computed with Eq. (20) using the hazard described in Sect. 5.3 and are shown in Table 9, illustrated in Fig. 12 and discussed below.

Illustration of the λc values for each case study structure and design approach considered, where for each group of designs the target value is denoted by the vertical text at the top of the plot
7.1 FBD according to EC8
All EC8 design solutions showed similar performance in terms of collapse safety with some scatter among the values. Values ranged from 0.8 to 25.5 × 10−4 for the cases without gravity load considerations and from 1.5 to 6.5 × 10−4 for the cases with gravity load considerations. These are comparable with other values observed in past studies for similar typologies in Italy; Iervolino et al. (2018) examined several structural typologies designed using the Italian building code (NTC) (NTC 2018) and computed λc values for RC frames in the order of 10–3 and 10−4, which were also similar to the findings for perimeter RC frames of Haselton and Deierlein (2007, chapter 6). As shown in Fig. 12, less than 50% of the case study frames met the λc,target. This was not a surprising result given that λc did not directly feature as a design input in the FBD method.
The importance class was anticipated to provide an additional degree of collapse safety, although no notable reduction in λc was observed. As shown in Table 9, λc for some of the importance class II cases were lower compared to importance class III cases, which was an unexpected result. This was due to the difference in provided ductility capacity. For a fixed T1 and higher design spectral acceleration in importance class III cases (Table 3), the member reinforcement ratios tended to be higher meaning the member curvature ductility capacities decreased. This translated to an overall lower system ductility, meaning the λc of structures with higher importance class tending to be higher. This observation highlights the careful balance between strength, stiffness and ductility in seismic design and illustrates that increasing the strength and stiffness of structural members in the name of improved collapse safety is not always an effective solution.
To better visualise this observation, a general trend may be observed via Fig. 13. Using Response-2000 (Bentz 2015), moment–curvature relationships were attained and the variation of curvature ductility capacity, μϕ, is plotted with respect to cross-section effective area, Aeff, and tensile reinforcement ratio, ρ. For a fixed value of ρ, taken as a rough proxy for the lateral resistance of a structure, an increase in Aeff is needed to increase μϕ. Additionally, μϕ can be increased by reducing ρ for a fixed value of Aeff. Therefore, by reducing Aeff of importance class II frames, one would essentially increase ρ resulting in decreased μϕ. With the same logic, the resulting λc of those frames would be expected to increase.

Interaction of curvature ductility capacity, μϕ, with respect to cross-section effective area, Aeff, and tensile reinforcement ratio, ρ, as per EC2 for square columns with symmetric B500C reinforcement, C25/30 concrete, with μϕ computed as the ratio of curvatures at peak and yield moment
By adding gravity loads, the collapse safety of the frames did not improve significantly. For example, the best performing structure showed a λc = 7.5 × 10−5, which was meeting the λc,target of 5.0 × 10−5, with the addition of gravity loads during design failing to meet the target. The reasons for such a scenario are likely related to similar conclusions made for the consideration of higher importance class, since by increasing the resistance, the performance of the frame is not necessarily improved. Through the inclusion of gravity loads during design, not only did the demands on the elements increase but also the overstrength factors by an average of 35%, which is in a way akin to having a higher importance class. Since there is no direct control to meet λc,target values, one may argue that the FBD method currently prescribed by EC8 is not suitable for uniform risk solutions. It must be stated that the aim here was not to diminish current code provisions, but rather highlight the absence of risk-targeted procedures which should be the focus of future development.
7.2 RTSA method
For the RTSA method, it is noted from Fig. 12 that both formulations tended to provide the desired collapse safety by meeting λc,target due to the inherent risk-targeted of the formulation. A fair degree of scatter among results and conservatism is noted for some cases. Structures designed following both formulations generally performed well with the exception of the RTSA-D TB cases. These discrepancies were mainly as a result of the assumptions made for the overstrength and ductility capacity at the no-collapse limit state. Of importance are also the assumptions regarding the conversion factors needed to move from the collapse to no-collapse limit state (i.e. rs, μNC and γls), where if incorrectly assumed, disagreement may be anticipated. The design cases presented here were iterated for T1 only, which for RTSA-I cases seemed to have little impact. Any additional iteration required via SPO analysis or NLRHA to further refine the assumptions of rs, μNC and γls were not performed, which is important to bear in mind. To this end, the assumed values of rs, μNC, γls and βRTR were checked against the true behaviour of the frames and how much discrepancy existed.
Figure 14a compares the observed γls values against those proposed by Dolšek et al. (2017), where large differences can be observed in some cases but without any consistent trend. This parameter has a notable impact when estimating the actual collapse capacity. Likewise, Fig. 14b compares the dispersions from the model proposed by Dolšek et al. (2017) to those observed here. The observed βRTR values follow the proposed model trend to a certain extent but the values tend to stabilise later at around T1 = 0.9 s, as opposed to 0.6 s as suggested. Relatively few cases had βRTR > 0.4, while the majority had slightly lower values. This, in addition to an underestimated γls, contributed to a decrease in the observed λc of the frames and helps explain the conservative nature of some of the results shown in Fig. 12. In any case, the assumption of βRTR = 0.4 is still a reasonable first estimate for most design cases but some instances where validation and possible design iteration would be needed were noted. Additionally, the assumption of equal βRTR for both the CLS and NC limit state (denoted as NCLS in Fig. 14), which is an inherent assumption of the RTSA methods, does not always appear to be a valid one. They are generally close but a notable difference could have a significant impact in the definition of collapse capacity fragility (Fig. 14b). This observation just concerns the record-to-record variability in response but is noted to be only one of many pertinent sources of uncertainty in seismic response.

Comparison of the Dolšek et al. model values for a γls and b βRTR as a function of T1 provided by Dolšek et al. (2017) with the actual values computed from IDA upon designing and detailing
To evaluate the assumptions of rs and μNC used in the RTSA methods, Fig. 15 plots the values obtained from an SPO analysis of the finalised designs. Observing Fig. 15a, the actual values were relatively independent of the initial design assumption and were observed to be between the trialled values of rs = 1 and 2, which is in line with the findings of Haselton and Deierlein (2007, chapter 6), where the overstrength of the perimeter RC frames, defined as the ratio of ultimate base shear to design base shear, was between 1.5 and 1.8, meaning that the overstrength defined herein as the base shear at yield to design base shear should be generally lower. In contrast, the overstrength of space frames had a trend with the number of storeys. It is important to note, that no consideration was given to the hardening slope of the backbone behaviour (i.e. elastic-perfectly plastic idealisation was assumed) of the structures of RTSA, which is important for identifying the collapse safety of the structure (Vamvatsikos et al. 2009). Based on the evidence here displayed, the values of overstrength are hard to identify as they depend on parameters like perimeter/space frame, number of storeys and the hardening behaviour of the structure. The under- and overestimation of rs was seen to have contributed largely to the conservativeness observed for some of the RTSA cases in Fig. 12. Figure 15b, on the other hand, does not show any trend or consistency in the μNC values with most conservatively exceeding the design assumption with the exception of D-TB cases. Unlike the parameters evaluated in Fig. 14, the assumptions of rs and μNC may be evaluated and checked using the results of SPO analysis, possibly requiring multiple design iterations.

Comparison of the assumed values for a rs and b μNC ratios, with the actual values computed from SPO upon designing and detailing, where the notation A refers to D-TA and I-A cases, and A/B refers to I-TA/D-TB cases
7.3 Proposed IPBSD formulation
For what concerns the proposed IPBSD formulation, consistent results were obtained in each case, as shown in Fig. 12. The actual λc computed from IDA met the λc,target set within a relatively narrow tolerance and without any case of excessive overdesign. This result demonstrated the proposed IPBSD’s efficiency in obtaining risk-targeted design solutions. Furthermore, the median values of collapse capacity observed in IDA matched those identified during design very well and were seen to be independent of any structural characteristics. Figure 16 gives the medians, η, and the βRTR of the collapse capacities of the design cases. The βRTR values established from IDA were first compared to the ones assumed via SPO2IDA during the design process. Similar to RTSA in Fig. 14b, some conservatism of design assumptions of βRTR may be observed in Fig. 16a, but still quite close to actual values and within acceptable bounds; possible iterations could be performed for more refined accuracy. The η used in design were slightly conservative compared to the actual model values (Fig. 16b), possibly due to slight overstrength or ductility in the structures, or due to the approximate nature of the SPO2IDA tool, but were nonetheless found to be sufficiently accurate to result in suitable and efficient design solutions.

Comparison of computed and assumed values of a βRTR and b η at CLS
The assumed and calculated overstrength values of qs (Fig. 3) from SPO analysis are presented in Fig. 17. As one may notice, the actual values of qs are not that different from the initial design assumption. For case study frames 5, 7, 9, the design qs was updated as an additional iteration was required to increase the accuracy of the method. After the initial design of those frames, notable overstrength were inherent due to strong-column weak-beam requirement and local ductility requirement of EC8. To satisfy the demands of ELF, the required longitudinal reinforcement ratio was below the limit value, hence, it was increased to match the demands of the code, thus resulting in relatively high overstrength of the overall structure. For the other frames, where overstrength was relatively negligible, no iteration was performed and was found to have negligible effects on the results. However, as already pointed out in Sect. 7.2, iterations might be necessary for the accurate estimation of qs, specifically when gravity loads are involved in design, and a certain level of overstrength is expected when any seismic code provisions are utilised.

Comparison of computed and design values of qs
7.4 Refined estimate of collapse risk
One of the assumptions of the proposed IPBSD method (and all others evaluated here) was that using Sa(T1) as an IM and IDA with the ground motions identified in Sect. 5.3 was a suitable strategy for estimating collapse risk. Research in recent years has indicated that this may not be the most robust approach and other IM definitions may be more suitable (e.g. the spectral acceleration at some multiple of T1 or averaged range around it) and other ground motion selection techniques (Baker 2011) may be more suitable. Eads et al. (2015) have shown that spectral acceleration averaged over a period range around T1, AvgSa, is a more efficient IM in collapse risk estimation. Ideally, this IM would be used here but given the simplicity and physical meaning of Sa(T1) in relation to the design base shear, this simpler option was preferred. Nevertheless, the question remains as to whether using Sa(T1) as the IM in an IDA with a single set of ground motion records still meets the collapse risk when characterised using more refined, but cumbersome, methods of collapse risk quantification? To shed some light on this, the λc of the IPBSD case frames was recomputed to verify that it was in fact slightly conservative when using AvgSa. For what concerns the use of a single ground motion record set, Eads et al. (2015) have shown that λc estimates were relatively insensitive to different sets when using AvgSa. Therefore, if it can be shown that the AvgSa-based λc values are at least as low as the Sa(T1)-based ones, the design results may be deemed suitable.
To do this, the IDA results previously established were reprocessed for all structures in terms of AvgSa, defined within a period range of 0.35 s and 3.55 s with a 0.10 s step for all structures. The distribution of collapse intensities was identified and integrated with the hazard curve associated with AvgSa to estimate λc. This hazard curve was computed from the same hazard model described in Sect. 5.3. Similar to Eads et al. (2015), collapse dispersions using AvgSa were lower and the overall λc was on the conservative side. Figure 18 illustrates the results with reference to original values computed and verified in Sect. 7.3. In short, the more refined AvgSa-based λc values are indeed lower than the Sa(T1)-based ones indicating that the designs established using Sa(T1) are slightly conservative. All methods evaluated here would be expected to show the same trend so it is not envisaged to be a drawback to the specific design method proposed per se, but rather a convenience choice for design. It is worth noting that for their implementation of RTBF (Sect. 4), Vamvatsikos et al. (2020) used AvgSa as their IM to address the issue discussed.

Illustration of collapse risks using Sa(T1) or AvgSa as the IM
8 Summary and conclusions
The ability to design structures following a simplified performance-based earthquake engineering (PBEE)-based methodology has been one of the many focusses of the earthquake engineering community. Current design methods, such as those founds in many design codes, deal with design without adequately accounting for the probabilistic nature of both seismic design input and structural response. In the disciplinary discourse of risk-consistent seismic design approaches, there is a tendency to balance the ease of implementation for practitioners with flexibility and accuracy in identifying risk-consistent design solutions.
This article proposed the integrated performance-based seismic design (IPBSD) framework, allowing the identification of feasible design solutions that limit expected monetary losses and target a given collapse safety. It was described via a step-by-step implementation and tested for several case study RC frame structures. Other existing design code approaches and risk-targeted approaches were described and critically reviewed by comparing some common categories, such as performance objectives, seismic hazard definition, non-linear behaviour treatment, risk-consistency and the flexibility of each method. Many of these methods were also tested for the case study structures examined in order to have a broad and thorough comparison of different approaches. Following a full design of each structure’s members, numerical models were developed and non-linear response history analysis was performed through an application of incremental dynamic analysis (IDA). Integrating this IDA response of each structure allowed the actual collapse safety to be quantified and compared with the initial limit targeted in design. The main conclusions of this study are as follows:
-
Half of the case study frames following Eurocode 8 met the MAFC condition, which was not surprising given the nature of the non-risk targeted approaches. Even though two importance classes were considered, no significant degree of increased collapse safety was consistently obtained. In fact, some of the importance class II frames performed better than the III ones since, for a fixed fundamental period, the member reinforcement ratios tended to reduce and led to increased member ductility capacities. This offsets the lower strength to provide a higher collapse capacity via increased ductility. Hence, a careful balance between strength, stiffness and ductility in seismic design is vital and simple increasing the strength and stiffness of structural members in the name of improved collapse safety is not always an effective solution;
-
The addition of gravity loads in the design process improved the collapse safety via additional overstrength. However, no consistent trend was observed pointing towards a need for its explicit consideration in design;
-
The apparent lack of design flexibility and heavy dependence on the design reference values in current implementations of risk-targeted spectra (RTS) means that underlying assumptions need subsequent modifications to result in widespread adaptation;
-
Design and validation of cases following the risk-targeted seismic action (RTSA) method demonstrated the advantages of risk-targeted approaches, as the majority of cases met the MAFC condition. It was found that assumptions regarding design input parameters had a significant impact when targeting a specific collapse safety. Several design cases initially reported collapse risk values much lower than the design target and was found to be as a result of conservative design input parameters, which could be refined through repeated design iterations;
-
Many of the assumptions needed for the RTSA method and the proposed IPBSD method require further quantification studies and experimentation for suitable initial design input parameters and targets; specifically, the anticipated collapse capacity uncertainty βRTR, or on how to quantify the expected ductility capacity and the post-capping strength of structural elements. Some research exists on these issues but much more could be done to consolidate the understanding and render them useful in design practice;
-
The proposed IPBSD approach demonstrated consistent results in terms of meeting the collapse safety targets for each case study frames. The targets were met with relatively narrow conservatism and without any case of excessive overdesign or requiring multiple design iterations.
-
The structures’ collapse capacities from IDA (i.e. median and dispersion) were slightly conservative, possibly due to supplementary ductility in the structure or the approximate nature of the SPO2IDA tool (Vamvatsikos and Cornell 2005); however, it was found to be sufficiently accurate to result in suitable and efficient design solutions.
In summary, methods following a risk-targeted approach performed reasonably well, while the cases designed following other traditional approaches, such as Eurocode 8, failed the target collapse safety condition. The beauty of the proposed IPBSD approach is in its flexibility and simplicity, as it combines the advantages of different methods in the literature, including code-based provisions, to give risk-consistent design solutions. It is envisaged that this approach, following further research and refinements, should form a part of the next-generation seismic design approaches aiming to achieve the goals of PBEE.
References
Ancheta TD, Darragh RB, Stewart JP, Seyhan E, Silva WJ, Chiou BSJ et al (2014) NGA-West2 database. Earthq Spectra 30(3):989–1005. https://doi.org/10.1193/070913EQS197M
ASCE 7-16 (2016) Minimum design loads for buildings and other structures. ASCE, Reston, VA, USA
Aschheim M, Black EF (2000) Yield point spectra for seismic design and rehabilitation. Earthq Spectra 16(2):317–335. https://doi.org/10.1193/1.1586115
Baker JW (2011) Conditional mean spectrum: tool for ground-motion selection. J Struct Eng 137(3):322–331. https://doi.org/10.1061/(ASCE)ST.1943-541X.0000215
Bentz E (2015) Appendix A: program manuals from sectional analysis of reinforced concrete members by: Graduate Department of Civil Engineering University of Toronto, Canada
Calvi GM, Sullivan TJ, Welch DP (2014) A seismic performance classification framework to provide increased seismic resilience. Geotech Geol Earthq Eng. https://doi.org/10.1007/978-3-319-07118-3_11
Calvi GM, Rodrigues D, Silva V (2018) Introducing new design spectra derived from Italian recorded ground motions 1972 to 2017. Earthq Eng Struct Dyn 47(13):2644–2660. https://doi.org/10.1002/eqe.3102
CEN (2004a) Eurocode 2: Design of concrete structures—part 1-1: general ruels and rules for buildings (EN 1992-1-1). CEN, Brussels, Belgium
CEN (2004b) Eurocode 8: Design of structures for earthquake resistance—part 1: general rules, seismic actions and rules for buildings (EN 1998-1:2004). CEN, Brussels, Belgium
CEN (2012) Eurocode 0: Eurocode-basis of structural design (EN 1990:2002 + A1). CEN, Brussels, Belgium
CEN (2018) Eurocode 8: Design of structures for earthquake resistance (draft)—part 1: general rules, seismic actions and rules for buildings (EN 1998–1:2018). CEN, Brussels, Belgium
CNR (2014) Istruzioni per la Valutazione Affidabilistica della Sicurezza Sismica di Edifici Esistenti. CNR - Commissione di Studio per la Predisposizione e l’Analisi di Norme Tecniche Relative Alle Costruzioni, Rome, Italy (in Italian)
Cook D, Liel AB, Luco N, Almeter E, Haselton C (2019) Implications of seismic design values for economic losses. In: 13th international conference on applications of statistics and probability in civil engineering, ICASP 2019, Seoul, South Korea
Cornell CA (1996) Calculating building seismic performance reliability: a basis for multi-level design norms. In: 11th World Conference on Earthquake Engineering (11WCEE), Acapulco, Mexico
Cornell CA, Krawinkler H (2000) Progress and challenges in seismic performance assessment. PEER Center News 3(2):1–2
Cornell CA, Jalayer F, Hamburger RO, Foutch DA (2002) Management agency steel moment frame guidelines. J Struct Eng 128:526–533. https://doi.org/10.1061/(ASCE)0733-9445(2002)128:4(526)
Cosenza E, Del Vecchio C, Di Ludovico M, Dolce M, Moroni C, Prota A et al (2018) The Italian guidelines for seismic risk classification of constructions: technical principles and validation, vol 16. Springer, Dordrecht. https://doi.org/10.1007/s10518-018-0431-8
Dolšek M, Lazar Sinković N, Žižmond J (2017) IM-based and EDP-based decision models for the verification of the seismic collapse safety of buildings. Earthq Eng Struct Dyn 46(15):2665–2682. https://doi.org/10.1002/eqe.2923
Douglas J, Ulrich T, Negulescu C (2013) Risk-targeted seismic design maps for mainland France. Nat Hazards 65(3):1999–2013. https://doi.org/10.1007/s11069-012-0460-6
Duckett W (2004) Risk analysis and the acceptable probability of failure. Struct Eng 83:1–5
Eads L, Miranda E, Lignos DG (2015) Average spectral acceleration as an intensity measure for collapse risk assessment. Earthq Eng Struct Dyn 44(12):2057–2073. https://doi.org/10.1002/eqe.2575
Fajfar P (2018) Analysis in seismic provisions for buildings: past, present and future: the fifth Prof. Nicholas Ambraseys lecture, vol 16. Springer, Dordrecht. https://doi.org/10.1007/s10518-017-0290-8
Fajfar P, Dolšek M (2012) A practice-oriented estimation of the failure probability of building structures. Earthq Eng Struct Dyn 41:531–547. https://doi.org/10.1002/eqe
FEMA (2000) Prestandard and commentary for the seismic rehabilitation of buildings. FEMA 356, Reston, VA, USA
FEMA (2009a) Quantification of building seismic performance factors. FEMA P695, Washington, USA
FEMA (2009b) NEHRP recommended seismic provisions. FEMA P-750, Reston, VA, USA
FEMA (2012) FEMA P-58-1: seismic performance assessment of buildings: methodology, vol 1. FEMA, Washington, DC
Gkimprixis A, Tubaldi E, Douglas J (2019) Comparison of methods to develop risk-targeted seismic design maps. Bull Earthq Eng 17(7):3727–3752. https://doi.org/10.1007/s10518-019-00629-w
Gokkaya BU, Baker JW, Deierlein GG (2016) Quantifying the impacts of modeling uncertainties on the seismic drift demands and collapse risk of buildings with implications on seismic design checks. Earthq Eng Struct Dyn 45(10):1661–1683. https://doi.org/10.1002/eqe.2740
Goulet CA, Haselton CB, Mitrani-reiser J, Beck JL, Deierlein GG, Porter KA et al (2007) Evaluation of the seismic performance of a code-conforming reinforced-concrete frame building—from seismic hazard to collapse safety and economic losses. Earthq Eng Struct Dyn 36:1973–1997. https://doi.org/10.1002/eqe.694
Günay S, Mosalam KM (2013) PEER performance-based earthquake engineering methodology, revisited. J Earthq Eng 17(6):829–858. https://doi.org/10.1080/13632469.2013.787377
Haselton CB, Deierlein GG (2007) Assessing seismic collapse safety of modern reinforced concrete moment frame buildings. PEER Report 2007/08, Berkeley, USA
Haselton CB, Liel AB, Taylor-Lange SC, Deierlein GG (2016) Calibration of model to simulate response of reinforced concrete beam-columns to collapse. ACI Struct J 113(6):1141–1152. https://doi.org/10.14359/51689245
Ibarra LF, Medina RA, Krawinkler H (2005) Hysteretic models that incorporate strength and stiffness deterioration. Earthq Eng Struct Dyn 34(12):1489–1511. https://doi.org/10.1002/eqe.495
Iervolino I, Spillatura A, Bazzurro P (2018) Seismic reliability of code-conforming italian buildings. J Earthq Eng 22(sup2):5–27. https://doi.org/10.1080/13632469.2018.1540372
Kennedy RC, Short SA (1994) Basis for seismic provisions of DOE-STD-1020. Livermore, California
Krawinkler H, Zareian F, Medina RA, Ibarra LF (2006) Decision support for conceptual performance-based design. Earthq Eng Struct Dyn 35(1):115–133. https://doi.org/10.1002/eqe.536
Luco N, Ellingwood BR, Hamburger RO, Hooper JD, Kimball JK, Kircher CA (2007) Risk-targeted versus current seismic design maps for the conterminous United States. In: SEAOC 2007 convention proceedings, Squaw Creek, CA
McKenna F, Scott MH, Fenves GL (2010) Nonlinear finite-element analysis software architecture using object composition. J Comput Civil Eng 24(1):95–107. https://doi.org/10.1061/(ASCE)CP.1943-5487.0000002
NTC (2018) Norme Tecniche per le Costruzioni (NTC18). Rome, Italy (in Italian)
NZS 1170.5:2004 (2004) Structural design actions part 5: earthquake actions. Wellington, New Zealand
O’Reilly GJ, Calvi GM (2019) Conceptual seismic design in performance-based earthquake engineering. Earthq Eng Struct Dyn 48(4):389–411. https://doi.org/10.1002/eqe.3141
O’Reilly GJ, Calvi GM (2020) Quantifying seismic risk in structures via simplified demand-intensity models. Bull Earthq Eng 18(5):2003–2022. https://doi.org/10.1007/s10518-019-00776-0
Pagani M, Monelli D, Weatherill G, Danciu L, Crowley H, Henshaw P et al (2014) OpenQuake engine: an open hazard (and risk) software for the global earthquake model. Seismol Res Lett 85:692–702. https://doi.org/10.1785/0220130087
Priestley MJN (2003) Myths and fallacies in earthquake engineering, revisited. In: The 9th Mallet Milne lecture. IUSS Press, Pavia, Italy
Priestley MJN, Calvi GM, Kowalsky MJ (2007) Displacement-based seismic design of structures. IUSS Press, Pavia, Italy
Ramirez CM, Miranda E (2009) Building specific loss estimation methods & tools for simplified performance-based earthquake engineering. Blume Center Report No. 171, Stanford, USA
Ramirez CM, Liel AB, Mitrani-Reiser J, Haselton CB, Spear AD, Steiner J et al (2012) Expected earthquake damage and repair costs in reinforced concrete frame buildings. Earthq Eng Struct Dyn 41(11):1455–1475. https://doi.org/10.1002/eqe.2216
SEAOC (1995) Vision 2000: performance-based seismic engineering of buildings. Sacramento, California
Shahnazaryan D, O’Reilly GJ, Monteiro R (2019) Using direct economic losses and collapse risk for seismic design of RC buildings. In: COMPDYN 2019—7th international conference on computational methods in structural dynamics and earthquake engineering, Crete Island, Greece. https://doi.org/10.7712/120119.7281.19516.
Silva A (2020) Implications of Earthquake-induced loss control in seismic design provisions. PhD thesis, IUSS Pavia, Italy
Silva V, Crowley H, Bazzurro P (2016) Exploring risk-targeted hazard maps for Europe. Earthq Spectra 32(2):1165–1186. https://doi.org/10.1193/112514EQS198M
Sinković NL, Brozovič M, Dolšek M (2016) Risk-based seismic design for collapse safety. Earthq Eng Struct Dyn 45(9):1451–1471. https://doi.org/10.1002/eqe.2717
Sullivan TJ, Calvi GM, Priestley MJN, Kowalsky MJ (2003) The limitations and performances of different displacement based design methods. J Earthq Eng 7:201–241. https://doi.org/10.1080/13632460309350478
Vamvatsikos D (2013) Derivation of new SAC/FEMA performance evaluation solutions with second-order hazard approximation. Earthq Eng Struct Dyn 42(8):1171–1188. https://doi.org/10.1002/eqe.2265
Vamvatsikos D, Aschheim MA (2016) Performance-based seismic design via yield frequency spectra. Earthq Eng Struct Dyn 45(11):1759–1778. https://doi.org/10.1002/eqe.2727
Vamvatsikos D, Cornell CA (2005) Direct estimation of seismic demand and capacity of multidegree-of-freedom systems through incremental dynamic analysis of single degree of freedom approximation. J Struct Eng 131(4):589–599. https://doi.org/10.1061/(ASCE)0733-9445(2005)131:4(589)
Vamvatsikos D, Akkar SD, Miranda E (2009) Strength reduction factors for the dynamic instability of oscillators with non-trivial backbones. In: COMPDYN 2009—ECCOMAS thematic conference on computational methods in structural dynamics and earthquake engineering,. Rhodes Island, Greece
Vamvatsikos D, Kazantzi AK, Aschheim MA (2016) Performance-based seismic design: avant-garde and code-compatible approaches. ASCE-ASME J Risk Uncertain Eng Syst Part A Civ Eng. https://doi.org/10.1061/AJRUA6.0000853
Vamvatsikos D, Bakalis K, Kohrangi M, Pyrza S, Castiglioni CA, Kanyilmaz A et al (2020) A risk-consistent approach to determine EN1998 behaviour factors for lateral load resisting systems. Soil Dyn Earthq Eng. https://doi.org/10.1016/j.soildyn.2019.106008
Woessner J, Wiemer S (2005) Assessing the quality of earthquake catalogues: estimating the magnitude of completeness and its uncertainty. Bull Seismol Soc Am 95(2):684–698. https://doi.org/10.1785/0120040007
Zareian F, Krawinkler H (2012) Conceptual performance-based seismic design using building-level and story-level decision support system. Earthq Eng Struct Dyn 41(11):1439–1453. https://doi.org/10.1002/eqe.2218
Žižmond J, Dolšek M (2019) Formulation of risk-targeted seismic action for the force-based seismic design of structures. Earthq Eng Struct Dyn. https://doi.org/10.1002/eqe.3206
Funding
The work presented in this paper has been developed within the framework of the project “Dipartimenti di Eccellenza”, funded by the Italian Ministry of Education, University and Research at IUSS Pavia.
Author information
Authors and Affiliations
Contributions
DS: Analysis; Software; Validation; Writing—Initial drafting. GJOR: Conceptualisation; Validation; Supervision; Writing—Initial drafting, editing and reviewing.
Corresponding author
Ethics declarations
Conflict of interest
The authors declare to have no conflicts of or competing interests.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Shahnazaryan, D., O’Reilly, G.J. Integrating expected loss and collapse risk in performance-based seismic design of structures. Bull Earthquake Eng 19, 987–1025 (2021). https://doi.org/10.1007/s10518-020-01003-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10518-020-01003-x