
Abstract
This paper presents a Bayesian methodology for updating the seismic hazard curves. The methodology is based on the comparison of predictive exceedance rates of a fixed acceleration level (given by the seismic hazard curves) and the observed exceedance rates in some selected sites. The application of the methodology needs, firstly, the definition of a prior probabilistic seismic hazard assessment based in a logic tree. Each main branch corresponds to a probabilistic model of calculus of seismic hazard. The method considers that, initially (or a priori), the weights of all branches of the logic tree are equivalent. Secondly, the method needs to compile the observations in the region. They are introduced in a database containing the recorded acceleration data (during the instrumental period). Nevertheless, the instrumental period in stable zones (as France) shows only very low acceleration levels recorded during a short observation period. Then, a method to enlarge the REX (number of observations) is presented taking into account the historical data and defining “synthetic” accelerations in the sites of observation. The synthetic REX allows to expand the period of observation and to increase the acceleration thresholds used in the Bayesian updating process. The application of the Bayesian approach leads to a new and more objective definition of the weights of each branch of the logic tree and, therefore, to new seismic hazard curves (mean and centiles). The Bayesian approach doesn’t change the probabilistic models (seismic hazard curves). It only modifies the weights of each branch of the logic tree.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In recent years, increasing efforts have been devoted to the assessment of the reliability of PSHA results. Different procedures have been tested and many publications have provided useful information on this subject (e.g. Selva and Sandri 2013; Mezcua et al. 2013; Humbert and Viallet 2008). Considering the high uncertainties in probabilistic seismic hazard assessments (PSHA) and the importance of PSHA results for the seismic design, it is pertinent to focus on the issue of consistency-checking of the PSHA results.
This article presents a Bayesian methodology for testing probabilistic seismic hazard analyses (PSHA) and to propose an alternative approach to determine the logic tree weighting scheme. We present a general Bayesian methodology in which the results of different probabilistic models included in a logic tree and the recorded data (which are independent from the data used in the PSHA) are used together to try reducing the uncertainties in a PSHA. In this sense, the main objective is not to develop a new PSHA model, but to allow, through a Bayesian approach, the explicit evaluation and comparison between predictions and observations to offer a rational approach to modify the prior weights of a logic tree.
2 Methodology
The Bayesian approach developed to update the seismic hazard is based on the comparison of the exceedance rates of some acceleration thresholds predicted by the probabilistic models of a logic tree (seismic hazard curves) and the exceedance rates really observed from available records in a set of seismic network stations (recorded data coming from instrumental data or “synthetic” data coming from historical data).
The method uses the Bayes theorem. Following this theorem, the conditional probability of occurrence of an event A, given that other event B was produced, is defined by:
Applying the method to the seismic hazard, we can replace A by the exceedance rate of a fixed acceleration threshold predicted by a probabilistic model (this information is typically provided by the seismic hazard curves) and B by the exceedance rate of the same acceleration threshold following the available observations (called here REX or Return of Experience). Then:
In a logic tree with N branches defining N input models of a seismic hazard calculation, the weight given to each branch of the logic tree is equivalent to the probability of the model, P(Model). The updating method consist on calculating the conditional probability of each model knowing the observations included in the REX, P(Model/Observation), that determines the posterior value of the weight of the logic tree branch.
If the method is initialized considering that the N branches of the logic tree are equivalent (equal probability), then the weight of each logic tree branch (or the probability of a model «i») is:
The objective consists in quantifying the following part of Eq. (2):
P(Observation) is independent on the models and is equivalent to a normalization factor. Then, the sum of P(Modeli/Observation) is equal to 1 (sum of weights a posteriori = 1). Performing the integration of Eq. (2) on the set of N models/branches of the logic tree, we have that:
Therefore,
To define P(Observation/Modeli), the model of earthquakes occurrence is supposed to follow a Poisson distribution with parameters λ and t:
P(n,t) is the probability to observe n earthquakes of magnitude greater than M during a period of observation t, and λ is the annual exceedance rate of these earthquakes.
If the recording stations are supposed to be independent, the probability to observe the exceedance of an acceleration level follows a Poisson distribution law (Beauval et al. 2007).
Nevertheless, if the occurrence of an earthquake of magnitude M implies the exceedance of an acceleration level at some stations, then there is a correlation among the different stations. The exceedance of an acceleration level follows, in this case, a more general distribution, the negative binomial distribution (Woo 1999):
-
Ai is the number of exceedances of an acceleration level, A*, predicted by the probabilistic model «i» on the global set of sites of stations of REX:
$$\text{A}_{i} = \sum\limits_{j = 1}^{L} {\uplambda_{\rm ij} \left( {\text{A}^{*} } \right)} \times \text{T}_{\rm j}$$(9) -
L is the number of selected stations of REX, Tj is the cumulative number of years of observation at station «j» , and λij (A*) is the annual exceedance rate of acceleration level A* fixed by the seismic hazard curve calculated at the site of station «j» following the probabilistic model «i».
-
The parameter k is indicative of the correlation among stations of the REX. If k tends to 1, the negative binomial distribution goes towards a Poisson distribution. The parameter k is the average number of sites impacted by one earthquake. This parameter can be defined, for example, using synthetic catalogues, a reference GMPE and calculating the number of stations that exceeds the threshold of acceleration selected. However, the use of non-correlated stations (considering a certain distance among stations) is preferred (although not always possible).
-
NREX is the number of total exceedances of the acceleration level A* observed (recorded) at L stations of REX.
We obtain finally that:
And P(Modeli/Observation) represents the weight of the model i in the logic tree.
The updating method of the seismic hazard modifies the “a priori” weight or probability of each probabilistic model P(Modeli) = 1/N with the “a posteriori” weight defined by Eq. (10). These updated or posterior weights are adopted to weigh the results and to calculate a new seismic hazard (median, mean and centiles 15 and 85%).
Therefore, the updating method of the seismic hazard doesn’t affect the individual calculation of the exceedance rates of the acceleration levels predicted by the prior probabilistic seismic hazard curves. It only adjusts the weights associated with each probabilistic model. Thus, the updating method only changes the final mean, median and centiles seismic hazard curves. These statistical values (seismic hazard curves) are affected by the weights assigned to the individual seismic hazard curves of the individual models.
The updating is performed using a comparison of probabilistic predictions with recorded and/or estimated observations (REX) at L stations. From this comparison we obtain new weights (or probabilities) of the N branches of the probabilistic logic tree. After the definition of the N posterior weights, the probabilistic results are post-processed considering the new weighting scheme, to calculate new seismic hazard curves at the same observation points of the REX.
The choice of the stations for the analysis of the REX could have a significant impact on the posterior weights of the branches. The final seismic hazard curves could vary depending on the stations selected to build the REX.
For this reason, the selection of the REX is an important part of the updating method. The considered REX must be representative of the study region and, preferably, it should cover the largest possible period of observation.
3 Prior model used
With the objective to apply the described methodology to a case study, we adopted the logic tree developed during the initial phases of the SIGMA project (www.projet-sigma.com).
The logic tree contains: 24 main logic tree branches associated with three seismotectonic models (Carbon et al. 2012), four GMPEs or attenuation relations (Akkar and Bommer 2010; Atkinson and Boore 2011; Zhao et al. 2006; Berge-Thierry et al. 2003) and two seismic catalogues. The combination of these hypothesis leads to the definition of 3 × 4 × 2 = 24 main branches.
As the purpose of the analyses is to verify the applicability of the Bayesian update, we decided to use only the main logic tree branches (24 main branches). Then, we didn’t consider the secondary branches associated to other uncertainties (as λ and β of the Gutenberg-Richter law, maximum magnitude, Mmax, and thickness of the seismogenic crust, H). This choice was made to simplify the analysis of the results. Nevertheless, the Bayesian method can be applied to any more complex logic tree.
The minimum magnitude considered in the PSHA used for the test is Mw = 4.5. For this reason, the REX (number of observations at the selected sites) should take into account only events with magnitudes greater than 4.5.
4 Definition of the REX database
The instrumental REX file including the acceleration records of the French seismic network (Réseau Accélérométrique Permanent, RAP) contains 970 acceleration records. 232 records come from earthquakes with magnitudes equal or greater than 4.5. The maximum PGA recorded (SAOF station) was 117 cm/s2 and only 71 records have a PGA greater than 10 cm/s2.
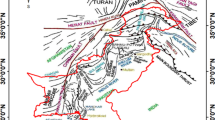
The French seismic network is composed by 84 stations across the entire French territory (Fig. 1). The majority of the stations are located in the most active seismic areas of France: the Alps and the Pyrenees.

Seismic stations of the French seismic network, RAP (green dots) and earthquakes included in the instrumental REX (yellow dots). The pink triangles correspond to the selected RAP stations in the SIGMA region
The historical REX, developed to enlarge the period of observation of instrumental period, was created using the Sisfrance database. It contains 1700 intensity records from year 463 to end of 1961. 1141 records have an epicentral intensity equal or greater than V (Fig. 2). Intensities lower than V were removed.

Seismic stations of the French seismic network, RAP (green dots) and earthquakes included in the historical REX (yellow dots). The pink triangles correspond to the selected RAP stations in the SIGMA region
The objective of the historical REX is to calculate the hypothetical or synthetic acceleration values probably generated at the stations of the REX during the historical events. The generation of synthetic accelerations has been performed as follows:
-
Calculation of epicentral distance from the earthquake epicenters to the recording station.
-
Calculation of peak ground acceleration (PGA) values that would have been probably generated at the stations. The acceleration values can be obtained using 2 methods:
-
Calculation of punctual (or site) intensities at the stations using intensity prediction equations defined in terms of epicentral intensities and epicentral distances (i.e. Mezcua et al. 2004; Martin et al. 2008; Carbon et al. 2007). Then, acceleration values are calculated using the punctual intensity and appropriate intensity-PGA relations. (i.e. Gómez Capera et al. 2007; Faccioli and Cauzzi 2006; Panza et al. 1997; Decanini et al. 1995; PS92 règles 1995; Atkinson and Kaka 2007). Therefore, the historical REX could be calculated using different relations, giving a range of predicted PGAs. Then, the uncertainty associated to the relation selected could be used in the updating approach. For example, an updating could be performed with each PGA-intensity relation and, then, a “mean” posterior weight for each branch of the logic tree can be calculated (as done in Viallet et al. 2017).
-
Calculation of acceleration values using GMPE’s. We used the GMPE specially developed for France during the SIGMA project (Drouet and Cotton 2015), and Cauzzi and Faccioli (2008).
-
The historical REX database only retained those records with an epicentral distance lower than 150 km. For larger distances, the intensity and the peak ground acceleration at the site is too low to be considered for an updating process.
The final historical REX contains 12,549 synthetic PGA records. These synthetic records correspond to the hypothetical recorded data at the RAP seismic stations located less than 150 km from the epicenter.
The analysis and filtering of the instrumental and historical REX lead to the definition of the number of observations. For example, analyzing the REX, we could find the number of observations in a selected set of stations, associated to earthquakes with magnitude greater than a defined threshold and exceeding a minimum PGA level.
5 Application of the Bayesian updating of a PSHA in the South-East of France
To test the application of the Bayesian update to the seismic hazard and to assess its relevance, we performed a series of sensitivity tests to analyze the effects of the different input data in the updating process. For example, we analyzed the effect of the correlation among stations, the effect of the duration of the observation period in the updating process, the effect of the selection of a single site or a set of sites, the effect of the acceleration threshold and the effect of the use of instrumental and historical data, etc. The complete set of tests performed are described in Secannel and Martin (2014).
To perform these tests, we used the simplified logic tree composed of 24 branches and different REX (PGA observations) defined considering different hypothesis: instrumental or historical data, several acceleration thresholds, different equation to estimate accelerations from intensities, etc.
The interpretation of the tests is performed comparing the specific REX developed for the test (observations during a period of time) and the exceedance rates of an acceleration threshold at the selected stations (i.e. Fig. 3). The exceedance rates at the selected stations are obtained as follows: (i) multiplying the seismic hazard curve of each station by the number of years of observation and (ii) adding the results of each station.

Comparison of exceedance rate during the working period of the selected stations and the historical REX. Set of 11 stations. Acceleration threshold = 50 cm/s2
For example, the Fig. 3 shows the prior mean exceedance rate (bold blue line) predicted by 24 branches of the logic tree compared with the exceedance rates derived from the observations (REX red dot). The test of the figure was performed considering 11 stations, with a period of completeness of each station of 112 years (events occurred from 1850 to 1962) and a historical REX generated using an intensity-PGA relation and considering an acceleration threshold of 50 cm/s2.
The updated mean exceedance rate (bold red line, Fig. 3) shows that the mean posterior exceedance rates are closer to observations (biggest red point, situated at axis value equal to 50 cm/s2) than the mean prior exceedance rate. In this case, the posterior exceedance rates are higher than the prior exceedance rates. It means that the updating of the seismic hazard lead to an increase of the seismic hazard.
Figure 4 shows the comparison between the observed exceedances of 50 cm/s2 in the 11 selected stations during the 112 years of observations and the 24 predictions associated to the 24 branches of the logic tree. The observed exceedances were calculated using historical information. We considered that for a threshold of 50 cm/s2, the period of completeness is 112 years. Figure 5 shows the a posteriori weights defined by the Bayesian update for the 24 branches of the logic tree. It can be observed that the branches of the logic tree that shows a prediction closer to the observed number of exceedances (13) have a higher posterior weight than the branches that predicts a number of exceedances further from the observations. For example, the branch 24 predicts 3.085 exceedances of 50 cm/s2 and the associated weight is 0.001. This is one of the branches that predicts a lower number of global exceedances. On the contrary, the branch 1 that predicts a global number of 5.643 exceedances (one of the highest predicted number of exceedances) and it has a posteriori weight equal to 0.156. None of the 24 branches of the logic tree is able to predict the 13 observed exceedances. This fact can be explained by the reduced logic tree used (only 24 main branches of the logic tree), by the relative short period of observation (112 years) or also by a non-adequate predictive model. In a real case, we could expect that the observations could be predicted by some of the branches of a complex logic tree (with thousands of branches or more).

Comparison of PGA = 50 cm/s2 exceedance rates predicted by 24 branches of the logic tree during the working period of the selected stations and the historical REX (13). Set of 11 stations. Acceleration threshold = 50 cm/s2

A posteriori weights predicted by the Bayesian update methodology after comparison of observations and predictions (24 a priori weights were equivalent). Set of 11 stations. Acceleration threshold = 50 cm/s2. Historical REX
Figure 6 shows the same type of test considering 11 stations and the instrumental REX obtained considering an acceleration threshold of 5 cm/s2 (and considering the operational period of each station) (Fig. 7).

Comparison of exceedance rate during the complete period of the stations and the instrumental REX. Set of 11 stations. Acceleration threshold = 5 cm/s2

Comparison of PGA = 5 cm/s2 exceedance rates predicted by 24 branches of the logic tree during the working period of the selected stations and the instrumental REX (1). Set of 11 stations
The updated mean exceedance rate (bold red line, Fig. 4) shows that the mean posterior exceedance rates are also closer to observations. However, in this case, the posterior exceedance rates are lower than the prior exceedance rates. Therefore, the updated seismic hazard is lower than the prior seismic hazard (Fig. 8).

A posteriori weights predicted by the Bayesian update methodology after comparison of observations and predictions (24 a priori weights were equivalent). Set of 11 stations. Acceleration threshold = 5 cm/s2. Instrumental REX
A battery of tests (similar to the previously presented) was performed. They allow defining some basic rules to envision an application of the Bayesian updating method to the PSHA. The main rules (even if some of them seem obvious) to take into account during the application of the Bayesian updating method are the following:
-
Logic tree: The logic tree should represent an exhaustive and mutually exclusive set of alternatives. In an ideal case, the observed or estimated REX should be into the range of predictions of the probabilistic models.
-
Number of sites: The use of more than one site of observation in the updating process increases the number of observations. Nevertheless, the effects of the updating process could not be equivalent at all sites because of the different shape of the seismic hazard curves in different sites. For engineering applications, even if the hazard function is normally needed only in one site, it is preferable to consider more observation sites (around the calculation site) in order to increase the number of possible comparisons observation-prediction.
-
REX: The number of observations (exceedances of a fixed acceleration level during a period of time) is important. Preferably, it should be highest as possible because the updating process is more effective.
-
Period of observations: It was observed that greater the period of observation, higher the effect of the updating method. This rule indicates that historical REX should be used (if possible) in order to enlarge the number of observations.
-
The threshold of acceleration used for the updating process: The updating process is always performed using a pre-defined acceleration threshold. Then, the results of the updating process are well defined for the accelerations of the seismic hazard curve near to the considered acceleration threshold. The level of the acceleration thresholds used should preferably be in agreement with the accelerations associated to the return periods of analysis.
We insist that the a posteriori (or updated) weights affecting to each seismic hazard curves of a logic tree don’t change the prior seismic hazard curves. Only the weight associated to each seismic hazard curve is modified or affected by the updating process. The a posteriori weights give a more objective estimation of the weight (or confidence) of the predictive model according to the available data.
Others authors used Bayesian approaches to modify prior weights to the different branches of a logic tree. For example, Woo and Aspinall (2015) performed a Bayesian updating of existing PSHA in UK. They showed how their Bayesian updating process provides a systematic means for modifying inputs according to empirical data observations acquired post hoc. If the original model parameters were on the side of conservatism, the updating may output reduced hazard results. Woo and Aspinall (2015) introduced a zoneless model in the updating process and the updated weights suggested a reasonable weight for a zoneless model.
In our logic tree, no zoneless methods were used. Nevertheless, zoneless models could be used because these models, based on past seismicity, could provide better predictions of seismic hazard. The use of zoneless models could provide a more exhaustive and mutually exclusive prior logic tree.
If the updating method is used with the complete logic tree, the posterior weights of the logic tree can be directly used to define a more likely median seismic hazard curve. Moreover, the updating method could be used also considering only the main branches of a logic tree (using the best-estimate seismic parameters of seismic sources). Then, the weights of the main branches of the logic tree could be used to define a more objective weights of the main branches of the logic tree (i.e. branches associated with a seismotectonic model or with a GMPE) based on their likelihood, in a similar way than the Sherbaum method (Scherbaum et al. 2009) give a quantitative weight for each GMPE used. Some other similar approaches were also developed in OECD (2015).
6 Conclusions
The method is justified from the mathematical point of view. It provides an objective way to define the weights of the different branches of the logic tree instead of using the common and subjective methodology based on expert judgment. The method can be applied in all cases and there are no mathematical constraints. The application of the method offers the possibility to use the data specific to the region and to decrease the uncertainties. This study will be complemented in the future through an extensive use of historical observation as described in Viallet et al. (2017). Moreover, zoneless models will be introduced in the logic tree to provide a more exhaustive and mutually exclusive set of alternatives in the logic tree.
Globally, the effect of the Bayesian updating method is to give a higher weight to the probabilistic models that predicts exceedance rates closer to the observed data (REX) and a lower weight to the probabilistic models predicting exceedance rates far from the observed data.
Therefore, the global effect of the Bayesian updating process is to bring closer the predictive probabilistic model to the actual observations.
There are, however, limitations in its application and we have to keep in mind constraints due to each context in which it is intended to be applied.
Some main rules to be taken into account during the application of the Bayesian updating method were defined. They are associated mainly to the definition of the prior logic tree, to the definition of the REX (number of observations) and to the definition of the threshold of acceleration used in the updating process.
The updating method can be used to update the weights of the complete logic tree and to obtain more likely median and centiles seismic hazard curves. Besides, it could be used to define more objective weights of the main branches of the logic tree. These weights could be compared to the weights of branches of the logic tree obtained using other existing methods (Scherbaum et al. 2009; OECD 2015). Such approaches will contribute to reduce epistemic uncertainties in PSHA that could not be addressed through expert’s judgments.
References
Akkar S, Bommer JJ (2010) Empirical equations for the prediction of pga, pgv and spectral accelerations in europe, the mediterranean region and the middle east. Seismol Res Lett 81(2):195–206
Atkinson GM, Boore DM (2011) Modifications to existing ground-motion prediction equations in light of new data. Bull Seismol Soc Am 101(3):1121–1135. doi:10.1785/0120100270
Atkinson G, Kaka S (2007) Relationships between felt intensity and instrumental ground motion in the Central United States and California. Bull Seismol Soc Am 97(2):497–510. doi:10.1785/0120060154
Berge-Thierry C, Griot-Pommera DA, Cotton F, Fukushima Y (2003) New empirical response spectral attenuation laws for moderate European earthquakes. J Earthquake Eng 7(2):193–222
Carbon D, Martin C, Secanell R (2007) Evaluation probabiliste de l’aléa sismique en intensité à l’échelle nationale. Lois d’atténuation en intensité, tests des modèles et confrontation au Rex. Rapport GEOTER—Ref n° GTR/EDF/0707-396
Carbon D, Drouet S, Gomes C, Leon A, Martin C, Secanell R (2012). Initial probabilistic seismic hazard model for France’s southeast 1/4. Inputs to sigma project for tests and improvements. Technical Report Ref: SIGMA-2012-D4-41, Seismic, 150 pages
Cauzzi C, Faccioli E (2008) Broadband (0.05 to 20 s) prediction of displacement response spectra based on worldwide digital records. J Seismolog 12(4):453–475
Decanini L, Gavarini C, Mollaioli F (1995) Proposta di definizione delle relazioni tra intensita’macrosismica e parametri de1 moto de1 suolo. In: Atti del 7′ Convegno Anidis 1, Siena, Italy 25–28 Sep 1995, pp. 63–72
Drouet S, Cotton F (2015) Regional stochastic GMPEs in low-seismicity areas: scaling and aleatory variability analysis—application to the French Alps. Bull Seismol Soc Am. doi:10.1785/0120140240
Faccioli E, Cauzzi C (2006) Macroseismic intensities for seismic scenarios estimated from instrumentally based correlations. In: Proceedings of first European conference on earthquake engineering and seismology, p 569
Gómez Capera AA, Albarello D, Gasperini P (2007) Aggiornamento relazioni fra l’intensità macrosismica e PGA. Progetto DPC-INGV S1, http://esse1.mi.ingv.it/d11.html
Humbert N, Viallet E (2008) A method for comparison of recent PSHA on the French territory with experimental feedback. In: Proceedings of the 14th world conference on earthquake engineering, Beijing, China, 12–17 Oct 2008
Martin Ch, Secanell R, Viallet E, Humbert N (2008) Consistency of PSHA models in acceleration and intensity by confrontation of predictive models to available observations in France. Working group on integrity of components and structures (IAGE) recent findings and developments in probabilistic seismic hazards analysis (PSHA) Methodologies and Applications, 7–9 Apr 2008, Lyon, France
Mezcua J, Ruedar J, Blanco RMG (2004) Re-evaluation of historic earthquakes in Spain. Seismol Res Lett 75:75–81
Mezcua J, Rueda J, García Blanco RM (2013) Observed and calculated intensities as a test of a probabilistic seismic-hazard analysis of Spain. Seismol Res Lett. doi:10.1785/0220130020
OECD (2015) In: Workshop on testing probabilistic seismic hazard analysis results and the benefits of Bayesian techniques, OECD/NEA/CSNI Wokshop, Pavia, Italy, 4–6 Feb 2015 (https://www.oecd-nea.org/nsd/docs/2015/csni-r2015-15.pdf)
Panza GF, Cazzaro R, Vaccari EF (1997) Correlation between macroseismic intensities and seismic ground motion parameters. Ann Geophys XL 5:1371–1382
Beauval C, Bard PY, Hainzl S, Gueguin Ph (2007) Aléa sismique probabiliste: les limites d’une comparaison entre estimations et observations. 7ème Colloque National AFPS 2007 – Ecole Centrale Paris
PS92 règles de construction parasismique (1995) AFNOR NF P 06-013. (https://www.icab.fr/guide/ps92/) Déc 1995
Secannel R, Martin CH (2014): Methodological exercise for testing a statistical approach to update a probabilistic seismic hazard assessment, Ref: SIGMA-2013-D4-139, web site in progress
Scherbaum F, Delavaud E, Riggelsen C (2009) Model selection in seismic hazard analysis: an information-theoretic perspective. Bull Seismol Soc Am 99(6):3234–3247
Selva JU, Sandri L (2013) Probabilistic Seismic hazard assessment: combining cornell-like approaches and data at sites through bayesian inference. Bull Seismol Soc Am 103(3):1709–1722103. doi:10.1785/0120120091
Viallet E, Humbert N, Mottier P (2017) Updating of a PSHA based on Bayesian inference with historical macroseismc intensities. In: 16th world conference on earthquake engineering, 16WCEE 2017, Santiago Chile, 9–13 Jan 2017
Woo G (1999) The mathematics of natural catastrophes. Published by Imperial College, London. ISBN 1-86094-182-6
Woo G, Aspinall WP (2015) Thirty-year Bayesian updating of PSHA for Hinkley Point NPP. In: CSNI workshop on testing PSHA results and benefit of bayesian techniques for seismic hazard assessment, Eucentre Foundation, Pavia, 4–6 Feb 2015
Zhao JX, Zhang J, Asano A, Ohno Y, Oouchi T, Takahashi T, Ogawa H, Irikura K, Thio HK, Somerville PG, Fukushima Y, Fukushima Y (2006) Attenuation relations of strong ground motion in japan using site classification based on predominant period. Bull Seismol Soc Am 96(3):898–913
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Secanell, R., Martin, C., Viallet, E. et al. A Bayesian methodology to update the probabilistic seismic hazard assessment. Bull Earthquake Eng 16, 2513–2527 (2018). https://doi.org/10.1007/s10518-017-0137-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10518-017-0137-3