
Abstract
In this paper, the lunar gravity assist (LGA) is investigated under the planar circular restricted three-body problem (PCRTBP) and two-body model. In the PCRTBP, the approximate expression of energy of the LGA in a small region of the Moon is derived. The expression uncovers the mechanism and mechanical process of the LGA in the framework of the PCRTBP. Based on the expression, the change of energy during the LGA is obtained and analyzed. To solve the limitation of the expressions and complete the research range of the LGA, a numerical methodology based on the patched-conic model is presented to analyze the LGA in a large region near the Moon. This numerical methodology cannot only obtain the change of energy but also may classify the trajectories before and after the LGA. As an application, we present a method to design a special kind of double LGA orbit. The design method synthesizes the preliminary results in the patched-conic model and the optimization in the PCRTBP. We can quickly obtain abundant double LGA orbits for the Earth–Moon transfer and interplanetary spaceflight.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The gravity assist is an important phenomenon in the multi-body problem. The theory of the gravity assist (or swing-by) based on the patched conics has been established and applied to the space missions for over 50 years, especially the deep space missions. Impressive applications include the Jupiter gravity-assists of the Voyager spacecraft, the multiple gravity-assists of the Galileo spacecraft for the Jupiter exploration, and the multiple gravity-assists of the Rosetta spacecraft for the comet exploration.
Many researchers focused on this field. Sohn (1964, 1966) applied the Venus swing-by modes to the Mars stop-over or fly-by missions with significant reductions in characteristic velocities compared to those of direct Earth–Mars–Earth mission modes. Niehoff (1966) applied the analytical and numerical results of gravity-assisted trajectory to the solar-system target investigations. Some expressions were derived to predict the maximum heliocentric velocity and energy changes from any perturbing mass. Broucke (1988) investigated the celestial mechanics of the gravity assist. Some important preliminary results of the patched-conic model were obtained: there is a loss of energy if the fly-by is in front of the smaller primary, and there is an increase in the energy if the fly-by is behind the smaller primary. Besides, the classification of the gravity-assist orbits was numerically analyzed in the framework of the circular restricted three-body problem (CRTBP). After that, Felipe and Prado (2004) continued this study and classified the two-dimensional swing-by trajectories in detail. An approach to planetary mission design which automates the search for gravity-assist trajectories was introduced by Longuski and Williams (1991). This method found all conic solutions given a range of launch dates, a range of launch energies and a set of target planets. The swing-by trajectories were studied and classified in the elliptic restricted three-body problem (ERTBP) by Prado (1997). Felipe and Prado (1999) investigated and classified the swing-by maneuvers by the three-dimensional restricted three-body problem. Casalino et al. (1999a) considered the low-thrust trajectories to escape from the solar system and searched for the strategy that maximizes the spacecraft energy for assigned payload and engine operating time. Casalino et al. (1999b) carried out a parametric analysis of a single-impulse powered swing-by and provided some suggestions concerning the most convenient position and direction of the velocity impulse. Helton et al. (2002) studied the automated design of the Europa orbiter tour using a series of gravity-assist fly-bys of the Galilean satellites. Strange and Longuski (2002) introduced a new analytical technique, directly related to Tisserand’s criterion, that permits the quick identification of all viable ballistic gravity-assist sequences to a given destination. Yam et al. (2004) incorporated the gravity assists at Venus and Earth to deliver greater mass (to Jupiter, Saturn, Uranus, Neptune and Pluto) than achievable with the Jupiter Icy Moons Orbiter (JIMO) mission engine alone. Zimmer and Ocampo (2005) presented a procedure for calculating the analytical derivatives required to optimize long duration constant specific impulse and multiple gravity-assist trajectories. Chen et al. (2014) investigated the accessibility of main-belt asteroids and the trajectories to reach them via the gravity-assist maneuvers.
Particularly, in the Earth–Moon system, the lunar gravity assist (LGA) has a significant effect on the path of a spacecraft flying close to the Moon. Dunham and Davis (1985) investigated the optimization problem of a multiple lunar assist trajectory sequence. Kawaguchi et al. (1995) studied the use of the LGA in the Lunar-A, Planet-B mission. Using patched-conic analysis and the solution of timing condition, Wilson and Howell (1998) developed the efficient techniques on the multiple LGAs trajectory design. The use of LGA to transfer payloads to Earth centered orbits was investigated in the CRTBP by Ocampo (2003). Using the LGA, the BepiColombo mission to Mercury increased the payload mass into the final orbit (Campagnola et al. 2004). Penzo (1998) summarized the benefits of LGA in: (1) assisting lunar capture, (2) repositioning geosynchronous communications satellites, (3) boosting spacecraft to Earth escape and departure to planets and other solar-system bodies, and (4) allowing small spacecraft to be launched as secondary payloads and released into almost a random orbit from which each may depart and maneuver in space with gravity assists from the Earth and Moon to perform a specific planetary or other mission. Besides, the investigation of the LGA can promote the development of the space missions in the Earth–Moon system, such as Earth-to-Moon transfer (Topputo 2013) and Moon-to-Earth transfer (Shen and Casalino 2014).
As mentioned before, the gravity assist is a special phenomenon in the multi-body problem. Therefore, only in the multi-body problem can we give the complete explanation of this phenomenon. However, in the previous literature, the analytical expressions of the gravity assist were derived in the patched-conic or two-body model. As for the study of the mechanical process of the gravity assist in the multi-body problem, it is not found in the literature (to the best of the authors’ knowledge). To get a thorough understanding of gravity assists, in this paper, we take the Earth–Moon system as an example and try to work out the mechanism of LGA in the Earth–Moon–spacecraft planar circular restricted three-body problem (PCRTBP).
The goal of this paper is to investigate the LGA in the perspective of PCRTBP and two-body problem. First of all, the mechanism of the LGA in the PCRTBP is studied. The approximate expression of the energy of spacecraft during the LGA is derived to describe the mechanical process of the LGA in detail. Then, to solve the limitation of the expression of the energy, a numerical methodology based on the two-body or patched-conic model is presented to analyze the LGA in the large region near the Moon. The change of energy and the classification of LGA orbits are numerically analyzed. These preliminary results of the two-body model contribute to the understanding of LGA in the PCRTBP. Finally, synthesizing the preliminary results of the patched-conic model and the optimization of the PCRTBP, we present a method to design a special kind of double LGA orbit.
According to the above discussion, this paper can be separated into five parts. The PCRTBP is introduced in Sect. 2 as the basic theory of this paper. The mechanism of the LGA in the PCRTBP will be presented in Sect. 3. In Sect. 4, a numerical methodology based on the two-body model is presented to analyze the LGA in the large region near the Moon. In Sect. 5, a design method of the double LGA is introduced. In Sect. 6, we give our conclusions of the paper.
2 Planar circular restricted three-body problem
In this paper, we will use the planar circular restricted three-body problem (PCRTBP). \(m_{1}\), \(m_{2}\) and \(m_{3}\) represent the mass of the Earth, the Moon and the spacecraft, respectively. In the PCR3BP, the mass of the spacecraft \(m_{3}\) is supposed to be negligible, and only the effects of the two primary bodies are considered. Therefore, the motion of the spacecraft is influenced by the attraction of the Moon and the Earth, but the motion of the two primary bodies is assumed not to be affected by the spacecraft. Besides, the motions of two primary bodies are restricted. Specifically, the Earth and the Moon are in circular motion about their barycenter. It is also supposed that the spacecraft moves in the plane of motion of the Earth and the Moon.
The motion of the spacecraft is complicated in the inertial coordinate. For convenience, we study the motion using the Earth–Moon rotating coordinates. The origin is taken at the Earth–Moon barycenter (EMB). The \(x\)-axis is given by the line from the Earth to the Moon. Besides, nondimensionalization is applied to simplify the form of the equations. The unit length is set as \(l_{\mathrm{em}}\), the distance between the Earth and the Moon. The unit time is set as \(T_{\mathrm{EM}} / 2\pi\), where \(T_{\mathrm{EM}}\) is the period of the Earth–Moon system. Hence, the Earth is placed at (\(- \mu, 0\)) and the Moon is placed at (\(1 - \mu, 0\)), where \(\mu = m_{2} / (m_{1} + m_{2}) = 0.01215\).
The equations of motion of the spacecraft in the dimensionless Earth–Moon rotating coordinates can be expressed as (Szebehely 1967)
where
and
The equations of the motion of the spacecraft are independent of the time, and we have the Jacobi constant of the motion
3 Mechanism of the LGA
In this section we investigate the mechanism of the LGA in the PCRTBP.
The total energy of the spacecraft with respect to the EMB inertial coordinate, \(E\), contains two parts, the kinetic energy \(K\) and the gravitational potential energy \(U\), i.e. \(E = K + U\). In this paper, the coordinate positions of the spacecraft in the EMB inertial coordinate and the Earth–Moon rotating coordinates are denoted by (\(X, Y\)) and (\(x, y\)), respectively. The kinetic energy \(K\) can be expressed by
The gravitational potential energy \(U\) can be expressed by
Therefore, we can obtain
According to Eqs. (4) and (5), the relationship between the energy \(E\) and the Jacobi constant \(C\) is
The Jacobi constant \(C\) is the invariant in the PCRTBP; hence, if we take the derivative with respect to \(t\), we get
From Eq. (6), we find that \(\mathrm{d}E / \mathrm{d}t\) is only relevant with the mass ratio \(\mu\) and the position (\(x, y\)). For a fixed position of the spacecraft, when \(\mu\) is 0.5, the absolute value of \(\mathrm{d}E / \mathrm{d}t\) reaches the maximum. That is to say, when the masses of the two primaries are equal, the change of \(E\) with respect to \(t\) will be most significant. In this paper, we only study the LGA of the Earth–Moon system; therefore, \(\mu\) is fixed and known, \(\mu = 0.01215\).
In addition, based on Eq. (6), we find that there exist two situations when \(\mathrm{d}E / \mathrm{d}t = 0\): the first one is \(y = 0\) (the \(x\)-axis), i.e. the spacecraft is located in the Earth–Moon line; the second one is \(r_{1} = r_{2}\) (the line \(x = \frac{1}{2} - \mu\)), i.e. the distances from the spacecraft to the Earth and Moon are equal. According to the two vertical lines \(y = 0\) and \(x = \frac{1}{2} - \mu\), the orbital plane is divided into four regions. The sign of \(\mathrm{d}E / \mathrm{d}t\) in each region is invariant. Figure 1 displays the distribution of \(\mathrm{d}E / \mathrm{d}t\) based on the calculation of Eq. (6). As we can see from the figure, \(\mathrm{d}E / \mathrm{d}t\) is smaller than 0 in the upper right and lower left regions, and \(\mathrm{d}E / \mathrm{d}t\) is larger than 0 in the upper left and lower right regions. Besides, in most of the regions, the absolute value of \(\mathrm{d}E / \mathrm{d}t\) is quite small, approximately 0. Only in the regions near the Earth or the Moon, the absolute values of \(\mathrm{d}E / \mathrm{d}t\) increase dramatically. Therefore, only when the spacecraft approaches the primaries will the energy of the spacecraft be changed remarkably. The significant change of the energy \(E\) is the mechanical reason of the LGA when the spacecraft passes close to the Moon.

Distribution of \(\mathrm{d}E / \mathrm{d}t\) in the Earth–Moon rotating coordinates
Figure 2 shows a LGA trajectory in the PCRTBP: (a) the trajectory in the Earth–Moon rotating coordinates, (b) the trajectory in the dimensionless EMB inertial coordinate. The initial condition of the LGA trajectory is \((x,y,\dot{x},\dot{y}) = ( - 0.8896,0.2511, - 0.2346,0.6169)\). As we can see, the spacecraft, successively, flies by the Earth and Moon. An apparent change of the shape of the trajectory occurs after the lunar fly-by, from the near-Earth elliptic orbit to the big elliptic orbit. The plot of \(E\) versus \(t\) for the LGA orbit is shown in Fig. 2(c). Most of the time, \(E\) almost keeps unchanged except for two dramatic fluctuations. Actually, the two fluctuations, successively, correspond to the Earth fly-by and the lunar fly-by. The second one (lunar fly-by) is particularly significant: the energy falls and rises in a short period of time. This phenomenon is consistent with our analysis of the distribution of \(\mathrm{d}E / \mathrm{d}t\).

LGA example: (a) orbit described in the Earth–Moon rotating coordinates; (b) orbit described in the EMB inertial coordinate; (c) plot of \(E\) versus \(t\)
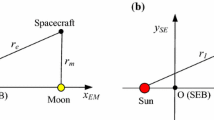
For convenience, Eq. (6) can be expressed in the Moon-centered polar coordinates (see Fig. 3): \(r_{1} = \sqrt{1 + r_{2}^{2} + 2r_{2}\cos \psi}\) and \(y = r_{2}\sin \psi\), therefore,

Moon-centered polar coordinate
Figure 4 illustrates the distribution of \(\mathrm{d}E / \mathrm{d}t\) near the Moon in the Earth–Moon rotating coordinates based on the calculation of Eq. (7). In this figure, the change of \(E\) is more significant in the closer region to the Moon. In the upper region of the \(x\)-axis, \(\mathrm{d}E / \mathrm{d}t\) is smaller than 0; in the lower region of the \(x\)-axis, \(\mathrm{d}E / \mathrm{d}t\) is larger than 0. Then, when the spacecraft passes through behind the Moon, the energy \(E\) will increase. On the contrary, when the spacecraft passes through in front of the Moon, the energy \(E\) will decrease. This analytical result is consistent with the conclusion of Broucke (1988). But, different from the patched-conic model adopted by Broucke, our discussion is completely based on the PCRTBP. Of particular note is that the above analytical result is just qualitative. Next, a quantitative result will be derived.

Distribution of \(\mathrm{d}E / \mathrm{d}t\) near the Moon
Based on Eq. (7), the integration over the time \(t\) is a direct method to calculate the change of \(E\). Unfortunately, this method is difficult to perform for the arbitrary LGA orbit, since the orbital variables \(r_{1}\), \(r_{2}\) and \(\psi\) are unknown functions of \(t\). Finally, we inevitably need to calculate the orbit using numerical integration. In this section, we try to derive some analytical equations to describe and analyze the LGA. In the derivation, first of all, we use the following relationship:
to substitute the derivative of \(E\) with respect to \(\psi\) for the derivative of \(E\) with respect to \(t\). In this relationship, \(\omega\) and \(v_{u}\) denote the angular velocity and the magnitude of the tangential velocity of the spacecraft with respect to the Moon in the rotating coordinates (see Fig. 3), respectively. When the motion of the spacecraft with respect to the Moon is prograde (counterclockwise), the sign of the right side of the above relationship is designated as “+”; otherwise, it is designated as “−”. Therefore, Eq. (7) can be rewritten
The distance between the perilune and the center of the Moon is denoted by \(D\). The angle between the perilune and the Earth–Moon line is denoted by \(\psi_{0}\), counterclockwise measured. The instantaneous eccentricity of the spacecraft with respect to the Moon at the perilune is denoted by \(e\), which describes the magnitude of the velocity at the perilune. If the direction of motion is known, the state of the spacecraft at perilune can be determined by the variables \(D\), \(\psi_{0}\) and \(e\). In our derivation, we assume that the state of the perilune is given, i.e. the variables \(D\), \(\psi_{0}\) and \(e\) are fixed.
Equation (8) will be available to calculate the change of \(E\) if we can derive the relationships between \(r_{1}\), \(r_{2}\), \(v_{u}\) and the angle \(\psi\). However, those relationships are still quite complicated. Hence, some simplifications will be introduced in the derivation. The simplifications are based on the following two hypotheses:
-
(1)
The LGA occurs in a small neighborhood of the Moon, therefore, \(r_{2} \ll 1\) and \(r_{1} \approx 1\).
-
(2)
The LGA occurs in a short period of time, therefore, the trajectory near the Moon in the rotating coordinates can be approximated by a conic orbit of the inertial coordinates.
Based on the hypothesis (1),
The magnitude of velocity of the spacecraft in the rotating coordinates can be obtained by
where \(\tilde{D}\) is the distance between the perilune and the center of the Earth, \(\tilde{D} \approx r_{1} \approx 1\). \(v_{0}\) is the magnitude of the velocity at the perilune in the rotating coordinates, which can be determined by the velocity at the perilune in the inertial coordinates,
and the relationship
where the prograde motion corresponds to the “−” sign, and the retrograde motion corresponds to the “+” sign.
According to the hypothesis (2), the conic orbit with the eccentricity \(e\) and perilune distance \(D\) can approximate the real orbit in the neighborhood of the Moon. Then
where \(f\) is the true anomaly of the conic orbit. The relationship between \(f\) and \(\psi\) is \(\psi = \psi_{0} \pm f\), where the prograde and retrograde motions correspond to “+” and “−” sign, respectively. Besides, to guarantee the hypothesis (2), we require \(e\) to be larger than 1 in the derivation, i.e., the instantaneous orbit with respect to the Moon at the perilune is a hyperbolic orbit.
From the hypothesis (2), we can also obtain the magnitude of tangential velocity of the spacecraft with respect to the Moon in the rotating coordinates:
Synthesizing the above equations, we derive
A prograde LGA orbit near the Moon in the Earth–Moon rotating coordinates is shown in Fig. 5. The red line denotes the orbit in the rotating coordinate, integrated in the PCRTBP. The blue line denotes the fitting curve (hyperbolic orbit) based on the hypothesis. By looking at the orbits in Fig. 5, it can be seen that the conic curve can well be fitted to the authentic orbit. Using Eq. (8), when the spacecraft passes though the circular neighborhood with radius \(R\) (see Fig. 5), the change of \(E\) can be obtained:
where \(\psi_{1} = \psi_{0} + f_{1}\) and \(\psi_{2} = \psi_{0} + f_{2}\).

Prograde LGA orbit near the Moon. The red line denotes the orbit in the rotating coordinates. The blue line denotes the hyperbolic orbit based on the hypothesis
Considering the simplified Eq. (9), Eq. (10) can be rewritten
It is noted that Eq. (11) is just applicable to the prograde motion. For the retrograde orbit, we can derive
In the circular neighborhood with the radius \(R\), \(f_{1} = -f_{2}\), \(f_{2} = \arccos (\frac{D(1 + e)}{eR} - \frac{1}{e})\). So, the change of the value of \(E\) can be expressed by
This equation can be applied to both prograde and retrograde motion.
Since \(0 < f_{2} < \pi\), \(\sin f_{2} > 0\). Then the sign of \(\Delta E\) depends on \(\psi_{0}\) in Eq. (13). When \(\psi_{0} = 0^{\mathrm{o}}\) or \(180^{\mathrm{o}}\), \(\Delta E = 0\); when \(0^{\mathrm{o}} < \psi_{0} < 180^{\mathrm{o}}\), \(\Delta E < 0\); when \(180^{\mathrm{o}} < \psi_{0} < 360^{\mathrm{o}}\), \(\Delta E > 0\). Hence, when the perilune is located behind the Moon, \(E\) increases; when the perilune is located in front of the Moon, \(E\) decreases. Besides, when \(\psi_{0} = 90^{\mathrm{o}}\) and \(270^{\mathrm{o}}\), \(\Delta E\) reaches its minimum and maximum, respectively. These conclusions are consistent with the results of Broucke (1988). But different from the patched-conic model adopted by the latter, our results are obtained from the perspective of PCRTBP. From Eq. (13), we find that the smaller \(D\), the larger \(\Delta E\) is. Therefore, if we desire to give a full play to the LGA, the altitude of the perilune should be as small as possible. It is interesting that based on Eq. (13), the larger \(v_{0}\), the smaller \(\Delta E\) is. That is to say, the fly-by speed should be small if the LGA is to play its full role.
According to the hypotheses, only in the neighborhood of the Moon will Eq. (13) be available. Therefore, the radius of the circular region, \(R\), cannot have a large value. According to Fig. 4, in the region where \(R\) is larger than 0.06 (unit length), \(\vert \mathrm{d}E / \mathrm{d}t \vert \) is smaller than 5, which can be regarded as a small value relative to the values near the Moon. Therefore, \(R\) is set to 0.06, approximately 23 000 km. Based on Eq. (13), Fig. 6 shows the distribution of \(\Delta E\) for different perilunes and motions when \(e = 1.3\). The figure is described in the Earth–Moon rotating coordinates. To avoid a Moon collision, the range of \(D\) is from 0.0045 (approximately 1738 km, the radius of the Moon) to 0.03 (approximately 11 500 km). As we can see from the figure, the numerical results are in accordance with our analysis above.

Distribution of \(\Delta E\) for different perilunes and motions when \(e = 1.3\)
To testify the availability of Eq. (13), a comparison with the integration results is displayed in Fig. 7. In this figure, we obtain the plots of \(\Delta E\) versus \(\psi_{0}\) for the prograde motion and different \(D\). The blue lines denote the integration results, and the red lines denote the results of Eq. (13). Comparing the curves in Fig. 7, we find that the results of Eq. (13) are very close to the integration results. Figure 8 shows the differences of the numerical integrations with respect to the equation results in Fig. 7. As we can see, the differences of \(\Delta E\) depend on \(D\), and the maximum difference for different \(D\) is smaller than 0.025. The errors with respect to the integration results are less than 5.3 %, which proves the high fidelity of our derivation. Besides, the maximum error occurs when \(\psi_{0} = 90^{\mathrm{o}}\) and \(270^{\mathrm{o}}\). When \(D\) equals about 0.03, the differences of \(\Delta E\) reach the minimum.

Comparison between the results of Eq. (13) and the integration results for the prograde motion when \(e = 1.5\)

Differences of the numerical integrations with respect to the equation results in Fig. 7
According to Broucke (1988), the gain in energy of the LGA given by the “patched-conics” model was obtained by
where the quantity \(V_{\infty}\) can be related to \(V_{0}\) by the conservation of energy in the two-body dynamics: \(V_{\infty}^{2} = V_{0}^{2} - \frac{2\mu}{D}\).
Figure 9 displays the three kinds of plots of \(\Delta E\) versus \(\psi_{0}\) for the prograde motion when \(e = 1.5\) and \(D = 0.01\). The blue line is the numerical integration result, the red line denotes the result calculated by Eq. (13), and the black dash line is the result of Eq. (14). In this figure, the result of Eq. (13) is closer to the integration results than Broucke’s result. Actually, Broucke’s theory is based on the patched-conic approach. Therefore, it is more applicable to a large region around the Moon. But for a small neighborhood of the Moon, our equation is more accurate. Of particular note is that, from Fig. 9, we cannot conclude that our results are better than Broucke’s results under any circumstances, because the application conditions of the two methods are different. When we research the energy change in the larger region of the Moon, the two important assumptions will be inapplicable and our equations will also be invalid. But the patched-conic method can well address this problem.

Comparison between the result of Eq. (13), the integration result, and Broucke’s result
The previous literature about the gravity assist focused on the change of energy or velocity before and after the gravity assist, but one did not investigate its specific process (Niehoff 1966; Broucke 1988; Ocampo 2003). Based on our derivation, we cannot only obtain the value of \(\Delta E\), but we also describe the process of the gravity assist in the PCRTBP.
According to Eqs. (11) and (12), in the neighborhood of the Moon, the approximate expression of the energy \(E\) with \(t\) can be written
In the above equation, \(f\) is the true anomaly of the fitting conic orbit and the function \(f(t)\) can be obtained by the classical formulas of the two-body model. When \(t = 0\), the spacecraft is located at the perilune and the energy equals \(E_{0}\), which can be obtained from the state of the perilune via Eq. (5). Besides, in Eq. (15), the prograde motion corresponds to the “+” sign, and the retrograde motion corresponds to the “−” sign.
Figure 10 displays the change curves of \(E\) versus \(t\) for the four different LGA orbits. The blue line is the result of numerical integration in the PCRTBP, whereas the red line is the result of Eq. (15). Figure 10(a) corresponds to the plot of \(E\) versus \(t\) for the LGA orbit in Fig. 2. Of particular note is that, limited by the hypotheses, the result of Eq. (15) is available only in the neighborhood of the Moon. Table 1 lists the state variables of the perilunes and the maximum errors between the results of the equation and the numerical integration in Fig. 10. In Table 1, P and R represent the prograde and retrograde motion of the perilunes, respectively.

Plot of \(E\) versus \(t\) for the LGA orbits
From above figures and the maximum errors in the table, we find that the change curves of Eq. (15) may well approximate the numerical result of the PCRTBP, which testifies the adequacy of our derivation. Using this expression, we unveil the mechanical process of the LGA in detail. Our investigation fills the research gap of the LGA in a small region near the Moon.
4 Numerical analysis of the LGA
In the last section, we investigate the mechanism of LGA in the PCRTBP and derive the expressions of energy \(E\). However, the limitation of the expression should be noted, i.e., only in the neighborhood of the Moon is it available. If the research range enlarges, the hypotheses supporting the derivation will be invalid. From a practical perspective, the LGA cannot be limited in a small neighborhood of the Moon. To solve this problem and complete the research range of the LGA, we present a numerical methodology based on the two-body or patched-conic model to analyze the LGA in a large region near the Moon. The preliminary results of the two-body model are conducive to the investigation of the LGA in the PCRTBP.
The method synthesizes the techniques of the orbital kinematics and the coordinate transformation. The idea of the method is as follows:
-
(1)
Transform the state of the perilune in the Earth–Moon rotating coordinates, \(\boldsymbol{x}_{p}\), into the Moon-centered inertial coordinates, then we can obtain the state of the perilune in the Moon-centered inertial coordinates, \(\boldsymbol{X}_{p}^{\mathrm{moon}}\).
-
(2)
Using the state \(\boldsymbol{X}_{p}^{\mathrm{moon}}\) and the classical orbital kinematics of the Moon-centered two-body model, we can derive the states of the spacecraft entering and escaping the sphere of lunar influence in the Moon-centered inertial coordinates, denoted by \(\boldsymbol{X}_{1}^{\mathrm{moon}}\) and \(\boldsymbol{X}_{2}^{\mathrm{moon}}\), respectively. The radius of the sphere of lunar influence is 66 280 km, as adopted by Chobotov (2002).
-
(3)
Transform the states of the enter point and the escape point, \(\boldsymbol{X}_{1}^{\mathrm{moon}}\) and \(\boldsymbol{X}_{2}^{\mathrm{moon}}\), into the Earth–Moon rotating coordinates, then we can obtain the corresponding states in the rotating coordinates, \(\boldsymbol{x}_{1}\) and \(\boldsymbol{x}_{2}\), respectively.
-
(4)
Putting \(\boldsymbol{x}_{1}\) and \(\boldsymbol{x}_{2}\) into Eq. (5), we can calculate the corresponding values of energy at the enter point and escape point in the sphere of lunar influence, denoted by \(E_{1}\) and \(E_{2}\), respectively. The change of \(E\) during the LGA can be expressed by \(\Delta E = E_{2} - E_{1}\).
Based on the above methodology, the distributions of \(\Delta E\) are displayed in Fig. 11. These figures are described in the Earth–Moon rotating coordinates. \(e\) denotes the instantaneous eccentricity of the spacecraft with respect to the Moon at the perilune. The range of \(D\) is from 0.0045 (approximately 1738 km, the radius of the Moon) to 0.06 (approximately 23 000 km). Similar to the results in the last section, when \(180^{\mathrm{o}} < \psi_{0} < 360^{\mathrm{o}}\), \(\Delta E > 0\); when \(0^{\mathrm{o}} < \psi_{0} < 180^{\mathrm{o}}\), \(\Delta E < 0\). By inspection of the figures it can be seen that for the same \(e\) and perilune, \(\vert \Delta E \vert \) of the prograde motion is larger than that of the retrograde motion. Besides, \(\vert \Delta E \vert \) decreases with the increase of \(e\), both for the prograde and retrograde motion. These results are consistent with the results of Broucke (1988).

Distributions of \(\Delta E\) for different \(e\) and motions
The methodology we presented cannot only calculate \(\Delta E\) but also it may obtain the values of the energy in the boundary of the sphere of influence, \(E_{1}\) and \(E_{2}\). Therefore, we can classify the trajectories before and after the LGA according to the values of energy. There are two types of orbits: the first one is the closed elliptic orbit with a negative value of the energy; the second one is the open hyperbolic or parabolic orbit with a non-negative value of the energy. Combining the two types of orbits, we can obtain four classes of LGA trajectories: the class I denotes the trajectory from an elliptic orbit to an open orbit via the LGA; the class II denotes the trajectory which remains elliptic before and after the LGA; the class III denotes the trajectory from an open orbit to an elliptic orbit via the LGA; the class IV denotes the trajectory which remains open before and after the LGA.
Figure 12 shows the distributions of the four classes of LGA in the rotating coordinates for different \(e\) and motions. The range of \(D\) is from 0.0045 to 0.06. According to Fig. 12, we find that the difference between the results of the prograde and retrograde motion is quite remarkable, even for the same \(e\). For the prograde motion, the classes I, II, and III are distributed at the far-Earth side, whereas the class IV generally is located at the near-Earth side; conversely, for the retrograde motion, the classes I, II and III are distributed at the near-Earth side, whereas the class IV generally is located at the far-Earth side. For both the prograde and the retrograde motion, the class I and the class III are, respectively, distributed in the lower and upper regions of the \(x\)-axis, which can easily be explained by the change of energy. When \(e\) increases, for the prograde motion, the area of the class II will extend, while the areas of the classes I and III will shrink; for the retrograde motion, the areas of the classes I, II and III will all extend, especially for the class II, but the area of class IV will shrink dramatically. In addition, we find that the distribution of the classes of LGA in the ascending order of Roman numerals from I to IV is consistent with the direction of motion. For example, when \(e\) is set to 2.5, the distribution of the classes of the prograde LGA from I to IV is prograde (counterclockwise); conversely, the distribution of the classes of the retrograde LGA from I to IV is retrograde (clockwise).

Distribution of four classes LGA for different \(e\) and motions
Based on the above distribution, we can choose the perilunes of different classes of LGA as the initial points of the numerical integration. Via the forward and backward integration in the PCRTBP, four classes of LGA orbits can be obtained. Figure 13 displays four classes of LGA trajectories in the EMB inertial coordinate for the prograde and retrograde motion when \(e = 1.5\). As we can see, the preliminary analysis of the two-body model can efficiently guide us to find and analyze the four classes of LGA orbits.

Four classes of LGA trajectories in the EMB inertial coordinate
5 Double LGA
The previous literature demonstrates that the LGA can efficiently save fuel cost and has been utilized in many space missions, such as the Earth–Moon transfer, interplanetary spaceflight, and prober capture (Helton et al. 2002; Sohn 1964, 1966; Chen et al. 2014). In Sects. 3 and 4, we investigate the LGA in the PCRTBP and patched-conic model, respectively. In this section, furthermore, we develop a method to design the double LGA in the PCRTBP.
In most space missions, the beginning of the trajectory is located in the neighborhood of the Earth. Therefore, from a practical angle, we investigate a special type of double LGA, whose start point is positioned on the low Earth parking orbit. For this kind of double LGA, there are two restricted conditions: the first one is that the perigee of the orbit before the first LGA must be located in neighborhood of the Earth; the second one is that the orbit after the first LGA must be elliptic in the EMB inertial coordinate to achieve the second LGA. Obviously, the first LGA is the key in the design of this kind of double LGA. Therefore, the design problem can be transformed into searching the appropriate perilune of the first LGA under two restricted conditions.
For the first constraint condition, our solution is presented as follows. Using the numerical methodology presented in Sect. 4, we can obtain the state of the enter point in the Earth–Moon rotating coordinates, \(\boldsymbol{x}_{1}\). Then the state \(\boldsymbol{x}_{1}\) can be transformed into the state of the EMB inertial coordinate, \(\boldsymbol{X}_{1}\). Hence, the semi-major axis \(a_{1}\) and eccentricity \(e_{1}\) can be calculated and regarded as the orbital elements of the orbit before the first LGA. The distance between the periapsis and the barycenter can be expressed by \(D_{1} = \vert a_{1}(e_{1} - 1) \vert \). Of particular note is that the distance \(D_{1}\) is not the distance between the perigee and the Earth’s center. Actually, the EMB is located inside the Earth. Therefore, we think that the difference between the two distances is small. \(\bar{R} = \mu l_{\mathrm{em}}\) is the distance from the EMB to the Earth center and \(R_{e}\) denotes the radius of the Earth. So the altitude of the perigee \(h\) should be in the range of the closed interval [\(D_{1} - R_{e} - \bar{R}, D_{1} - R_{e} + \bar{R}\)]. If we require the altitude of the perigee \(h\) is 500 km, \(D_{1}\) should satisfy \(R_{e} - \bar{R} + 500~\mbox{km} \le D_{1} \le R_{e} + \bar{R} + 500~\mbox{km}\). This is the constraint of \(D_{1}\).
For the second constraint condition, our solution is relatively simple. Using the numerical methodology presented in Sect. 4, we can obtain the energy of the escape point, \(E_{2}\). The regions where \(E_{2} \ge 0\) are the infeasible regions. This is the constraint of the perilune of the first LGA.
Figure 14 displays the distribution of \(D_{1}\) for different \(e\) and motions using the numerical methodology of Sect. 4. These figures are described in Earth–Moon rotating coordinates. The range of \(D\) is from 0.0045 to 0.06. The region of the perilune where \(E_{2} \ge 0\) is marked by the blue color. The red regions are the feasible regions of the perilune satisfying the condition of \(D_{1}\). According to the above analysis, only the red regions outside the blue region are possible for the double LGA. As we can see from the figures, for the same \(e\), it seems that the possible regions of the prograde and retrograde motions are symmetric about the line \(x = 1 - \mu\). With the increase of \(e\), the possible regions enlarge, both for the prograde and the retrograde motions.

Distributions of \(D_{1}\) and possible regions for different \(e\) and motions
Using the above numerical results, we can choose the appropriate perilune of the first LGA from the possible regions. Once the position of the perilune is chosen, the state of the perilune \(\boldsymbol{x}_{p}\) can be determined for the given \(e\) and direction of motion. Via the forward and backward integration in the PCRTBP, the complete orbit can be calculated from the initial point (perilune). It is noted that the possible regions in Fig. 14 are obtained in the patched-conic model and just satisfy the necessary condition of the perilune. The orbit corresponding to the chosen perilune may not belong to the special double LGA we require. Therefore, it is necessary to optimize the preliminary perilune in the PCRTBP. The optimization method is described as follows.
(1) Determine the variables of the optimization. Fixed \(e\) and the direction of motion of the perilune are taken, while the position of the perilune is variable. Hence, the parameters describing the position of the perilune, (\(D, \psi_{0}\)), need to be optimized. In addition, the forward integration time \(t_{2}\) determines the time-of-flight between the two LGAs, which can influence the shape of the double LGA. So \(t_{2}\) is another variable of the optimization. As for the backward integration time \(t_{1}\), it can be obtained by setting the first perigee as the terminal condition of integration. In summary, the variables of the optimization are (\(D, \psi_{0}, t_{2}\)).
(2) Determine the objective function of the optimization. For the double LGA we require, the altitude of the initial Earth orbit \(h_{1}\) is 500 km, and the altitude of the perilune of the second LGA \(h_{2}\) cannot exceed 30 000 km. Therefore, the optimization problem can be expressed by
(3) Determine the initial values of the variables of optimization. The initial values of (\(D, \psi_{0}\)) can be obtained from the possible regions of the perilune. As for the initial value of \(t_{2}\), we can use the period of the elliptic orbit after the first LGA, \(T_{2}\), to assess it. According to the numerical calculation in Sect. 4, the semi-major axis \(a_{2}\) of the elliptic orbit after the first LGA can be obtained. Then \(T_{2}\) can be calculated by \(T_{2} = 2\pi \sqrt{a_{2}^{3}}\). If we require the number of turns around the EMB between two LGAs to be less than \(n\) (\(n > 0\)), the initial value of \(t_{2}\) can be set to \(kT_{2}\), \(k = 1,2, \ldots,n\).
(4) Finally, we can use the initial values of the variables in Step (3) and perform the optimization algorithm to solve the optimization problem (16).
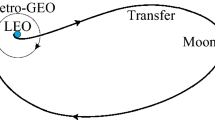
The double LGA trajectories for different \(e\) and motions are displayed in Fig. 15. These orbits are described in the EMB inertial coordinates.

Double LGA trajectories in the EMB inertial coordinate
As we can see from Fig. 15(a) and (c) are the single-circle double LGA trajectories, and (b) and (d) are the multi-circle double LGA trajectories. After the first LGA, the orbit is changed from a near-Earth elliptic orbit to a big elliptic orbit. After the second LGA, the energy increases, and the orbit is changed into the hyperbolic orbit and escape from the Earth–Moon system.
Table 2 displays the performance of the double LGA orbits in Fig. 15. \(E_{\mathrm{earth}}\) is the energy with respect to the Earth after the second LGA. \(\Delta v\) is the impulse required in the low Earth circular orbit for the double LGA. Without the double LGA, the impulse required to reach the same \(E_{\mathrm{earth}}\), \(\Delta \tilde{v}\), is also shown in this table. The difference between \(\Delta v\) and \(\Delta \tilde{v}\) is the fuel-saving magnitude, showing the contribution of the double LGA. As we can see from the table, the fuel savings are larger than \(100~\mbox{m}/\mbox{s}\). Using the technique of the double LGA, we can perform a relatively small impulse maneuver near the Earth to achieve the deep space mission. Therefore, this way can efficiently save fuel cost. Besides, the double LGA orbits can be regarded as the initial orbits of the Earth–Moon transfer. How to optimize these double LGA orbits in the Sun–Earth–Moon restricted four-body problem will be investigated in the future.
The design method of the double LGA we present synthesizes the preliminary results in the patched-conic model and the optimization in the PCRTBP. We can quickly obtain abundant double LGA orbits by this method.
6 Conclusion
In this paper we investigated the LGA in the perspective of the PCRTBP and the two-body model. In the PCRTBP, we derived the approximate expressions of energy \(E\) of the LGA in the neighborhood of the Moon. The expressions uncovered the mechanism and mechanical process of the LGA in the small region around the Moon from the perspective of PCRTBP. The analysis of the expressions displayed that the position of the perilune of the LGA orbit can significantly influence the LGA: when the perilune is located behind the Moon, \(E\) increases; when the perilune is located in front of the Moon, \(E\) decreases. These conclusions are consistent with the results of the patched-conic model derived by Broucke (1988). Besides, the analysis also showed that if we desire to give a full play to the LGA, the altitude of perilune and the lunar fly-by speed should be as small as possible. Compared to the numerical integrations, the errors of the equation we derived are less than 5.3 %, testifying the adequacy of our derivation. However, the limitation of the expressions should be noted, i.e., only in a small region of the Moon is it available. If the study area enlarges, the hypotheses supporting the derivation will be invalid.
To solve the limitation of the approximate expressions and complete the research range of the LGA, a numerical methodology based on the two-body or the patched-conic model was presented to analyze the LGA in a large region near the Moon. This numerical methodology cannot only obtain the change of energy, but it also helps us to classify the trajectories before and after the LGA. Based on the numerical calculation, the relationship between the perilune and the change of energy in the large region near the Moon is similar with that in the small neighborhood of the Moon. Besides, four classes of LGA orbits were defined and discussed. The velocity (as regards the direction of motion and the magnitude) of the perilune can significantly influence the distribution of the four classes of LGA. The preliminary results of the two-body model can efficiently guide us to find and analyze the four classes of LGA orbits in the PCRTBP.
As an application, we presented a method to design a special kind of double LGA orbit. First of all, the numerical results of the two-body model provided the possible region for the preliminary perilune of the first LGA. Then the optimization was applied to find the double LGA orbit we demanded in the PCRTBP. We can quickly obtain abundant double LGA orbits using this method. Numerical examples displayed that the technique of the double LGA can efficiently save fuel cost in the Earth escape. The double LGA orbits we designed can be regarded as the initial orbits for the Earth–Moon transfer and the interplanetary spaceflight.
The methods and results presented in this paper are concerned with the Earth–Moon system, but actually they can also be valid for any planar circular restricted three-body system. Finally, we should point out that the eccentricity of the Earth–Moon system is discarded in the PCR3BP. A more accurate model, the elliptic restricted three-body problem (ERTBP), can solve this problem. LGA research in the ERTBP will be our future work.
References
Broucke, R.A.: The celestial mechanics of the gravity assist. In: Proceedings of the AIAA/AAS Astrodynamics Conference, Minneapolis, pp. 83–85. AIAA, Washington, DC (1988)
Campagnola, S., Jehn, R., Van Damme, C.C.: Design of lunar gravity assist for the BepiColombo mission to Mercury. In: 14th AAS/AIAA Space Flight Mechanics Conference, Maui, Hawaii, Feb (2004). Paper AAS 04-130
Casalino, L., Colasurdo, G., Pasttrone, D.: Optimal low-thrust escape trajectories using gravity assist. J. Guid. Control Dyn. 22(5), 637–642 (1999a)
Casalino, L., Colasurdo, G., Pastrone, D.: Simple strategy for powered swingby. J. Guid. Control Dyn. 22(1), 156–159 (1999b)
Chen, Y., Baoyin, H.X., Li, J.F.: Accessibility of main-belt asteroids via gravity assists. J. Guid. Control Dyn. 37(2), 623–632 (2014)
Chobotov, V.A.: Orbital Mechanics. AIAA, Reston (2002)
Dunham, D., Davis, S.: Optimization of a multiple lunar-swingby trajectory sequence. J. Astronaut. Sci. 33(3), 275–288 (1985)
Felipe, G., Prado, A.F.B.A.: Classification of out of plane swing-by trajectories. J. Guid. Control Dyn. 22(5), 643–649 (1999)
Felipe, G., Prado, A.F.B.A.: Trajectories selection for a spacecraft performing a two-dimensional swingby. Adv. Space Res. 34(1), 2256–2261 (2004)
Helton, A.F., Strange, N.J., Longuski, J.M.: Automated Design of the Europa Orbiter Tour. J. Spacecr. Rockets 39(1), 17–22 (2002)
Kawaguchi, J., Yamakawa, H., Uesugi, T., Matsuo, H.: On making use of lunar and solar gravity assists in Lunar-A, Planet-B missions. Acta Astronaut. 35(9–11), 633–642 (1995)
Longuski, J.M., Williams, S.N.: Automated design of gravity-assist trajectories to Mars and the outer planets. Celest. Mech. Dyn. Astron. 52, 207–220 (1991)
Niehoff, J.C.: Gravity-assisted trajectories to solar-system. J. Spacecr. Rockets 3(9), 1351–1356 (1966)
Ocampo, C.A.: Transfers to Earth centered orbits via lunar gravity assist. Acta Astronaut. 52, 173–179 (2003)
Penzo, P.A.: A Survey and Recent Development of Lunar Gravity Assist. Space Studies Institute, Princeton University, Princeton (1998)
Prado, A.F.B.A.: Close-approach trajectories in the elliptic restricted problem. J. Guid. Control Dyn. 20(4), 797–802 (1997)
Shen, H.X., Casalino, L.: Indirect optimization of three-dimensional multiple-impulse Moon-to-Earth transfers. J. Astronaut. Sci. (2014). doi:10.1007/s40295-014-0018-9
Sohn, R.: Venus swingby mode for manned Mars missions. J. Spacecr. Rockets 1, 565–567 (1964)
Sohn, R.: Manned mars trips using Venus flyby modes. J. Spacecr. Rockets 3(2), 161–169 (1966)
Strange, N.J., Longuski, J.M.: Graphical method for gravity-assist trajectory design. J. Spacecr. Rockets 39(1), 9–16 (2002)
Szebehely, V.: Theory of Orbits. Academic Press, New York (1967)
Topputo, F.: On optimal two-impulse Earth–Moon transfers in a four-body model. Celest. Mech. Dyn. Astron. 117, 279–313 (2013)
Wilson, R.S., Howell, K.C.: Trajectory design in the Sun–Earth–Moon system using lunar gravity assists. J. Spacecr. Rockets 35(2), 191–198 (1998)
Yam, C.H., McConaghy, T.T., Chen, K.J., Longuski, J.M.: Design of low-thrust gravity-assist trajectories to the outer planets. In: International Astronautical Congress, Sep–Oct (2004). Paper IAC.04.A.6.02
Zimmer, S., Ocampo, C.: Analytical gradients for gravity assist trajectories using constant specific impulse engines. J. Guid. Control Dyn. 28(4), 753–760 (2005)
Acknowledgements
This work was supported by the State Key Program of National Natural Science Foundation of China under Grant 11432001 and the National Natural Science Foundation of China under Grant 11402021. The authors also thank the Innovation Foundation of BUAA for Ph.D. Graduates and the China Scholarship Council (CSC) for fellowship support.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Qi, Y., Xu, S. Mechanical analysis of lunar gravity assist in the Earth–Moon system. Astrophys Space Sci 360, 55 (2015). https://doi.org/10.1007/s10509-015-2571-5
Received:
Accepted:
Published:
DOI: https://doi.org/10.1007/s10509-015-2571-5