
Abstract
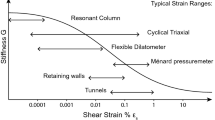
In the last two decades, small strain shear modulus became one of the most important geotechnical parameters to characterize soil stiffness. Finite element analysis have shown that in-situ stiffness of soils and rocks is much higher than what was previously thought and that stress-strain behaviour of these materials is non-linear in most cases with small strain levels, especially in the ground around retaining walls, foundations and tunnels, typically in the order of 10−2 to 10−4 of strain. Although the best approach to estimate shear modulus seems to be based in measuring seismic wave velocities, deriving the parameter through correlations with in-situ tests is usually considered very useful for design practice.The use of Neural Networks for modeling systems has been widespread, in particular within areas where the great amount of available data and the complexity of the systems keeps the problem very unfriendly to treat following traditional data analysis methodologies. In this work, the use of Neural Networks and Support Vector Regression is proposed to estimate small strain shear modulus for sedimentary soils from the basic or intermediate parameters derived from Marchetti Dilatometer Test. The results are discussed and compared with some of the most common available methodologies for this evaluation.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Maximum shear modulus, G 0, has been increasingly introduced in stiffness evaluations for design purposes, for the last 10-15 years. At the present moment, one of the best ways for measuring it is to evaluate compression and shear wave velocities and thus obtain results supported by theoretical interpretations. The advantages of this approach are widely known, mainly because test readings are taken through intact soil in its in-situ stress and saturation levels, thus practically undisturbed, and also dynamic stiffness can be close to operational static values [1, 2]. However, the use of seismic measures implies a specific and more expensive test and so, many atempts have been made to correlate other in-situ test parameters, such as those obtained by Standard Penetration Test (SPT) [3], Piezocone Test (CPTu) [4] or Marchetti Dilatometer Test (DMT) [5–7], with G 0, using cross calibrations (e.g., seismic or triaxial among others).
The DMT is one of the most appropriate tests for this task (although some relations can be settled using SPT or CPTu) since it uses a measurement of a load range related with a specific displacement, which can be used to deduce the highly accurate stress-strain relationship (E D ), supported by the Theory of Elasticity. Moreover, the type of soil can be numerically represented by the DMT Material Index, I D , while in situ density, overconsolidation ratio (OCR) and cementation influences can be represented by the lateral stress index, K D , allowing for high quality calibration of the basic stress-strain relationship [7]. The purpose of this work is to estimate G 0 from the DMT basic and intermediate parameters using neural networks and Support Vector Regression.
The present paper is organized as follows: In Section 2 an overview of the most important correlations used in this subject is reported, in order to get a clear view of the problem context. In Section 3 the data set is presented, as well as the methodology used for the experiments on this subject, its results and subsequent discussion. As usual, the last section will be used for conclusions and final remarks.
2 Maximum shear modulus (G 0) prediction by DMT
Marchetti dilatometer test or flat dilatometer, commonly designated by DMT, has been increasingly used and it is one of the most versatile tools for soil characterization, namely loose to medium compacted granular soils and soft to medium clays, or even stiffer if a good reaction system is provided. The test was developed by Silvano Marchetti [5] and can be seen as a combination of both Piezocone and Pressuremeter tests with some details that really makes it a very interesting test available for modern geotechnical characterization [7]. The main reasons for its usefulness on deriving geotechnical parameters are related to the simplicity (no need of skilled operators) and the speed of execution (testing a 10 m deep profile takes around 1 hour to complete) generating quasi-continuous data profiles with high accuracy and reproducibility.
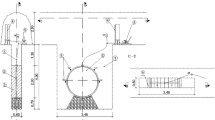
In its essence, dilatometer is a stainless steel flat blade (14 mm thick, 95 mm wide and 220 mm length) with a flexible steel membrane (60 mm in diameter) in one of its faces. The blade is connected to a control unit on the ground surface by a pneumatic-electrical cable that goes inside the position rods, ensuring electric continuity and the transmission of the gas pressure required to expand the membrane. The gas is supplied by a connected tank/bottle and flows through the pneumatic cable to the control unit equipped with a pressure regulator, pressure gauges, an audio-visual signal and vent valves. The equipment is pushed (most preferable) or driven into the ground, by means of a CPTu rig or similar, and the expansion test is performed every 20 cm. The (basic) pressures required for lift-off the diaphragm (P 0), to deflect 1.1 mm the centre of the membrane (P 1) and at which the diaphragm returns to its initial position (P 2 or closing pressure) are recorded. Due to the balance of zero pressure measurement method (null method), DMT readings are highly accurate even in extremely soft soils and, at the same time the blade is robust enough to penetrate soft rock or gravel (in the latter, pressure readings are not possible), supporting safely 250 KN of pushing force. The test is found especially suitable for sands, silts and clays where the grains are smaller (typically \(\frac {1}{10}\) to \(\frac {1}{5}\)) compared to the membrane dimension [8].
Four intermediate parameters, Material Index (I D ), Dilatometer Modulus (E D ), Horizontal Stress Index (K D ) and Pore Pressure Index (U D ), are deduced from the basic pressures P 0, P 1 and P 2, having some recognizable physical meaning and some engineering usefulness [5], as it will be discussed below. The deduction of current geotechnical soil parameters is obtained from these intermediate parameters covering a wide range of possibilities. In the context of the present work, besides the basic pressures, only E D , I D and K D have a physical meaning on the determination of G 0, so they will be succinctly described as follows [7]:
-
1.
Material Index, I D : Marchetti [5] defined Material Index, I D , as the difference between P 1 and P 0, basic measured pressures normalized in terms of the effective lift-off pressure. The I D parameter is one of the most valuable indexes deduced from DMT due to its ability to identify soils throughout a numerical value that can be easily introduced in specific formulae for deriving geotechnical parameters. In a simple form, it could be said that I D is a “fine-content-influence meter”[7], providing the interesting possibility of defining dominant behaviours in mixed soils, usually very difficult to interpret when only grain size is available, thus it may be associated to an index reflecting an engineering behaviour.
-
2.
Horizontal Stress Index, K D : The horizontal stress index [5] was defined to be comparable to the at rest earth pressure coefficient, K 0, and thus its determination is obtained by the effective lift-off pressure (P 0) normalized by the in-situ effective vertical stress. K D is a very versatile parameter since it provides the basis to assess several soil parameters such as those related with state of stress, stress history and strength, and shows dependency on several factors namely cementation and ageing, relative density, stress cycles and natural overconsolidation resulting from superficial removal, among others. The parameter can be regarded as a K 0 amplified by penetration effects [5] and displays a typical profile very similar in shape to OCR profiles, giving useful information not only about stress history but also on the presence of cementation structures [7]. Since undrained shear strength of fine soils can be related and obtained via OCR and the relation between K 0 and the angle of shearing resistance is well stated by soil mechanics theories, this parameter is also used with success in deriving shear strength.
-
3.
Dilatometer Modulus, E D : Stiffness behaviour of soils is generally represented by soil moduli, and thus the base for in-situ data reduction. Theory of Elasticity is used to derive dilatometer modulus, E D [5] , by considering that membrane expansion into the surrounding soil can be associated to the loading of a flexible circular area of an elastic half-space, and thus the outward movement of the membrane centre under a normal pressure (P 1−P 0) can be calculated. In short, E D is a parameter that includes both Young modulus (E) and Poisson’s coefficient (ν) and can be expressed as follows:
$$ E_{D}=\frac{E}{1-\nu^{2}}=34.7(P_{1}-P_{0}) $$(1)Generally speaking, soil moduli depend on stress history, stress and strain levels drainage conditions and stress paths. The more commonly used moduli are constrained modulus (M), drained and undrained compressive Young modulus (E 0 and E u ) and small-strain shear modulus (G 0), this latter being assumed as purely elastic and associated to dynamic low energy loading.
Maximum shear modulus, G 0, is indicated by several investigators [2, 7, 9] as the fundamental parameter of the ground. If properly normalized, with respect to void ratio and effective stress, it could be seen as independent of the type of loading, number of loading cycles, strain rate and stress/strain history [9]. It can be accurately deduced through shear wave velocities, \(G_{0}=\rho {v_{s}^{2}}\), where ρ stands for density and v s for shear wave velocity.
However, the use of a specific seismic test imply an extra cost, since it can only supply this geotechnical parameter, leaving strength and insitu state of stress information dependent on other tests. Therefore, several attempts to model the maximum shear modulus as a function of DMT intermediate parameters for sedimentary soils have been made in the last decade. Hryciw [10] proposed a methodology for all types of sedimentary soils, developed from indirect method of Hardin & Blandford [11]. Despite its theoretical base, references on this method are scarce and in general it is not applied for practical analysis due to some scatter around the determination, as illustrated by the results obtained in Portuguese normally consolidated clays [6]. The reasons for this scatter may be related to an expectable deviation of K 0 due to the important disturbance effects generated by penetration. On the other hand, this methodology ignores dilatometer modulus, E D , commonly recognized as a highly accurate stress-strain evaluation, and also lateral stress index, K D , and material index, I D , which are the main reasons for the accuracy in stiffness evaluation offered by DMT tests [6]. Being so, the most common approaches [12–14] with reasonable results concentrated in correlating directly G 0 with E D or M D M T (constrained modulus), which have revealed linear correlations with slopes controlled by the type of soil. In 2006, Cruz [6] proposed a generalization of this approach, trying to model the ratio \(R_{G} \equiv \frac {G_{0}}{E_{D}}\) as a function of I D . In 2008, Marchetti [15] using the commonly accepted fact that maximum shear modulus is influenced by initial density and considering that this is well represented by K D , studied the evolution of both R G and G 0/ M D M T with K D and found different but parallel trends as a function of the type of soil (that is I D ), recommending the second ratio to be used in deriving G 0 from DMT, as consequence of a lower scatter. In 2010, using the Theory of Elasticity, Cruz [7] approximate G 0 as a non-linear function of I D , E D and K D , from where a promising median of relative errors close to 21 % with a mean(std) around 0.29 %(0.28 %) were obtained. It is worth mentioning that comparing with the previous approach - R G - this approximation, using the same data, lowered the mean and median of relative errors in more than 0.05 maintaining the standard deviation (Table 2).
In this work, to infer about the results quality it will use some of the same indicators used by Hryciw, Cruz and others that are: the median, the arithmetic mean and standard deviation of the relative errors
where \(\widetilde {G_{0}}(i)\) stands for the predicted value and G 0(i) for the measured value given by seismic wave velocities (which is assumed to be correct). A final remark to point out that since in this work the no-intercept regression is sometimes used, the R 2 values will not be presented as they may not be meaningful in this case [16]. It is also worth to remark that in the context of DMT and from the engineering point of view, the median is the parameter of choice for assessing the model quality [7] since the final value for maximum shear modulus relies on all set of results obtained in each geotechnical unit or layer. For this reason, we will use the median to compare the performance of the different algorithms.
3 Data sets, experiments and results
3.1 Data sets
The WDS data set will be used in the forthcoming experiments. This data set is the same used in the development of the non-linear G 0 approximation done by Cruz in [7], resulting from 860 DMT measurements performed in Portugal by Cruz and world wide by Marchetti et al. [15] (data kindly granted by Marchetti for the work presented in [7]), which included data obtained in all kinds of sedimentary soils, namely clays, silty clays, clayey silts, silts, sandy silts, silty sands and sands. Since the Marchetti data does not include the record of the basic parameters, P 0, P 1 and u 0, only the Portuguese subset - denoted by PsS and consisting of 92 DMT measurements - of WDS will be used when trying to predict G 0 from these parameters.
The WDS main statistical measures with respect to I D , E D , K D and G 0 parameters are given in Table 1 (in parenthesis the same measures for PsS). Figures 1 and 2, where data from WDS and PsS, respectively, is represented using MatLab function plotmatrix, aims a clear view of variables dispersion. As one can see, PsS has the additional parameters P 0, P 1 and u 0.

Sample WDS: values for I D ,E D ,K D and G 0

Sample PsS: values for P 0,P 1,u 0,I D ,E D ,K D and G 0
3.2 Maximum shear modulus (G 0) prediction by DMT intermediate parameters
In this subsection it is reported the search for a fitting of G 0, using the DMT intermediate parameters E D , I D and K D . The dataset used in this task is the WDS, as explained in Section 3.1. Several types of neural networks (NN), from the Ian Nabney’s Netlab toolbox for Matlab [17], were used in order to improve the results obtained with traditional approaches and to achieve the best results with this kind of tool. The purpose was to find the best NN algorithm for the DMT problem. This process started by performing some experiments with traditional Multi Layer Perceptrons (MLP’s) with different learning algorithms, namely Quasinewton, Conjugated Gradient and Scaled Conjugated Gradient (SCG) but, as it will be shown later, the results were not as good as expected (with one exception), and so Radial Basis Function (RBF), Bayesian and Fitting neural networks were applied. The results obtained with these neural networks were not better than those obtained with MLP’s and so the last approach was to use Support Vector Regression in order to try to improve the results obtained with NNs.
For all the experiments we follow a training/test procedure using the well known 10-fold cross validation method and performed 30 repetitions of each experiment to guarantee a better statistical significance. This is the most common and widely accepted methodology to obtain a good generalization [18].
For each algorithm, a huge set of experiments was performed, varying the involved parameters such as the number of neurons in the MLP hidden layer, the number of epochs or the minimum error for stopping criteria. The results presented in Tables 4 to 7 are therefore the best ones for each regression algorithm and represent the mean and standard deviations (std) of the 10×30 performed tests for each best configuration. It is important to stress the fact that, when compared to traditional approaches where all the data is used to build the model, this methodology tends to produce higher standard deviations since in each experiment only a fraction of the available data is used to evaluate the model. As this fact may bias the comparison between these algorithms and the traditional approaches in terms of some direct comparisons, we revaluate the results concerning the regression functions obtained in previous works (as Table 2), and updated that results using cross validation in the same manner as described above.
As we are now using 10-fold cross validation in every method, the following procedure was used to evaluate each method. For each fold we compute the median of relative errors in the test set. Then we took the mean out of that (10) medians. As we repeat this experiment 30 times, saving the mean for each of that repetitions, we will have a sample of size 30 for the error of each method. What we present on each table is therefore the mean and standard deviation of those samples.
Comparing Table 3 with Table 2 one can seen the effect of using the method here described with a simpler one where the only measure computed was the median, mean and standard deviation of errors when all the data was used to determinate the fitness function.
Table 4 shows the best results for the experiments performed with common MLP regression using three different learning algorithms: Quasinewton, Conjugated Gradient and SCG and with Bayesian, RBF’s (with thin plate spline activation function) and Fitting neural networks regression, by applying several combinations for the number of iterations in RBF’s or the number of inner and outer loops for the Bayesian NN’s.
The results are not significantly better (statistical tests are presented later) than those obtained with tradicional non-linear regression (Table 3), with the exception of the neural network trained with conjugated gradient that shows a significant improvement when compared with the other algorithms.
An attempt to improve the quality of results was carried out by using Support Vector Regression (SVR). Support Vector Machines [19] are based on the statistical learning theory from Vapnik and are specially suited for classification. However, there are also algorithms based in the same approach for regression problems known as Support Vector Regression (SVR). The performed experiments with SVRs were carried out using LIBSVM [20] for Matlab. Two different kinds of SVR algorithms: 𝜖-SVR, from Vapnik [21] and ν-SVR from Schölkopf [22] were applied, which differ in the fact that ν-SVR uses an extra parameter ν∈(0,1] to control the number of support vectors. Preliminary experiments were performed with the four available kernels: linear, polynomial, radial basis function and sigmoid, using different values for the involved parameters. Since the best results were obtained with the radial basis function kernel, more exhaustive experiments were performed using this one. For these experiments a search for the best results was made in the C, 𝜖 (ν) space and so different values for the parameter C (cost) and for parameters 𝜖 and ν were used.
The best results obtained with both 𝜖-SVR and ν-SVR with the radial basis function kernel are shown in Table 5 reveling slightly better results when compared with those obtained with the conjugated gradient neural network and better than those obtained with the other MLP’s and the traditional regression algorithms.
In the previous experiments we tried to estimate G 0 as a function of I D , E D and K D . Following the same strategy as Cruz [7], other experiments were performed and the results are presented in Table 6. In these experiments, G 0 was estimated only as a function of two of the three available variables. As last option E D was used as a single input variable but the results were worst than those obtained using more input variables (due to lack of space they are not shown here). In these experiments only SVR’s were used, as they presented the best results in the previous experiments.
After the last set of experiments it can be seen that the best results are still those presented in Table 5, the ones that were obtained by using the three available parameters K D , I D and E D .
Additional experiments with the intermediate parameters were conducted splitting I D values in coherent groups, namely those related with clay, silt and sandy soils, respectively represented by the following I D intervals: I D <0.6, 0.6≤I D <1.8 and I D ≥1.8. This operation makes a partition of the original 860 data set elements in subsets with 449, 259 and 152 elements respectively. Experiments with these data sets (subsets) were performed using only SVR algorithms. Results are presented in Table 7.
Although these results can be pointed as very interesting, specially with 𝜖-SVR, it can not be concluded that these are better than those obtained with the complete data set (Table 5) since there is one larger subset with a result slightly higher and two smaller subsets with a slightly lower result (remember I D -values distribution in Fig. 1). This indicates that the methodology can produce interesting results in some particular cases, deserving a more detailed study. Nevertheless from a geotechnical point of view it may be considered a very promising result.
3.3 Maximum shear modulus (G 0) prediction by DMT basic parameters
Despite all the work reviewed in Section 2 (a more exhaustive review is available in Cruz [7]), it hasn’t been already tried to model G 0 as a straightforward function of the basic parameters P 0, P 1 and P 2. In addition to this the promising results presented in Section 3.2 lead the authors to go further and try to estimate G 0 using only the DMT basic parameters. However, there are some difficulties in the interpretation of P 2 values, since it can represent very distinctive situations in different type of soils, as explained below:
-
In sands, due to its permeable behavior, the penetration and the first two measurements taken when the membrane is inflating do not generate significant pore pressures and so, the parameter can be roughly compared to the pore pressure resulting from the hydrostatic level, in equilibrium. In fact, during inflation the membrane displaces the sandy particles away from the blade while during deflation they tend to remain in the displaced position and, therefore, the pressure on the membrane is that of the water in the pores.
-
In clays, since they tend to rebound and thus, contribute equally to pressurize the blade, P 2 parameter represents a mixed of both water and soil pressures, and thus it should only be used qualitatively, as sustained by Marchetti [15].
-
Furthermore, in soils with intermediate behaviors (silts, sandy clays or clayey sands) the problem is even worse than with clays, since it reveals a mixed behavior between fully drained (sands) and fully undrained (clays), creating some important problem for a reasonable interpretation [7].
As a consequence of these, it was considered more appropriate to work with equilibrium pore-pressures (u 0), calculated from the position of water level externally obtained, instead of P 2. Thus, in the next experiments the objective is to model G 0 as function of P 0, P 1 and u 0 parameters, avoiding the need for special interpretations, which turns to be much more efficient to include in mathematical operations. As stated before, for that purpose, only subset PsS is used. With the characterization pointed on Table 1 and Fig. 2 it can be seen that this subset is comparable to the WDS in terms of variables distribution and limits in exception of the G 0 parameter where the available data is restricted to the range 12-110, where in WDS it goes 6-530. This is relevant, as the conclusions about this experiments must take this into account.
Concerning the G 0 prediction using the (P 0,P 1,u 0) parameters, the schema was similar to the one described in the previous subsection for the intermediate parameters. A traditional regression approach was first used and then the Neural Network and Support Vector Regression experiments were made. Two sets of input parameters were used: one using P 0, P 1 and u 0 and other neglecting u 0.
Regarding traditional regression, the least squares method returned some interesting results which can be seen in Table 8. Those results are the best when considering all the possible combinations of the transformations exponential, square root, logarithmic and square to the dependent and independent variables.
It should be noted that in Table 8, δ≈0.448, which combined with the range of values for u 0 (roughly say, [0,0.2] ) results on a multiplicative effect in the prediction \(\widetilde {G_{0}}\) - that is e δu0×f(P 0,P 1) - of approximately [1,1.1]. Thus, it was expectable that the introduction of the u 0 parameter didn’t bring too much improvement to our previous result as it happened.
Regarding the Neural Network approaches, as explained in the previous subsection, several exploratory experiments were performed with different kinds of MLPs and SVRs. Results from these preliminary experiments show that the best ones were also obtained with SVRs with the radial basis function kernel and for that reason we focus on more detailed experiments using this combination. Results from the SVRs with radial basis function kernel are presented in Tables 9 and 10, where the u 0 parameter also seem to be negligible in terms of G 0 prediction (Fig. 3).

Boxplot for G 0 relative errors vs different methods concerning DMT intermediate parameters
4 Statistical tests
In order to have a strong support to some of the claims made in previous sections, we made some statistical tests. As some of the hypothesis need to use parametric tests were not verified, we relied on the Kruskal-Wallis [23] test to draw the conclusions. As it is well know, this may lead to let some differences between models not detected by the test, but it makes the results more robust. We set α=0.05 as default significance level, and used Matlab to compute the following results. As explained before, for each method we used a 30 elements sample, that result from the experiences made with the repetitions of the cross validation procedure.
We run two different tests: One regarding the samples obtained in Section 3.2 - related with DMT intermediate parameters - and other with the (P 0,P 1,u 0) set as explained in Section 3.3.
In Table 11 we present the differences between methods in terms of the G 0 prediction that are considered statistically significant by the Kruskal-Wallis method. In that table, the several methods are sorted with respect to the variable of interest (less error on top and worst prediction below). If the comparison between a pair of methods (i,j) is considered statistically significant we mark the intersection with a plus sign. The resulting matrix is obviously symmetric and, as so, we just filled the upper triangular part. For sake of brevity we do not present the full values for the hypothesis testing, but a multcompare plot is presented on Figs. 4 and 5 for each of the tests.

Multiple comparison plot for G 0 relative errors vs different methods concerning DMT intermediate parameters

Boxplot for G 0 relative errors vs different methods concerning DMT basic parameters

Multiple comparison plot for G 0 relative errors vs different methods concerning DMT basic parameters
Figure 3 reinforces the results from Kruskal-Wallis test and, together with the previous sections lead to conclude that, for the same method, the usage of the 3 parameters (I D ,E D ,K D ) is better than any combination of them. Note, that statistically that does not apply to the (P 0,P 1,u 0) set, where the only significant diference is between the 𝜖-SVR with two input variable (P 0,P 1) and the ν-SVR with three input variables (Fig. 6).
Another important conclusion is that, for the same number of used parameters, the traditional regression give poorest results than the usage of SVR in terms of relative error.
As final remark, it should be notice that we didn’t apply these tests to results given by the I D partition (7) as the data is rather unbalanced between the different subsets and it probably bias the conclusions.
5 Conclusions
Figure 7 summarizes the results presented in the previous sections and represents the quality parameters of some of the best results.

Some Results: values for mean and std of \(median(\frac {|G_{0} - \widetilde {G_{0}}|}{G_{0}})\) in experiments
It emphasizes the good results of the new approach that was applied to predict maximum shear modulus by DMT using Neural Networks and Support Vector Machines. Based on the performed experiments and supported by the non-parametric statistical tests it is possible to outline the following considerations:
-
Concerning the prediction with DMT intermediate parameters,
-
Neural Networks and Support Vector Machines improve the current state-of-the-art in terms of G 0 prediction.
-
The results show that, in general, NNs and SVRs lead us to much smaller medians, when compared to traditional approaches.
-
Regarding the problem characteristics, the SVR approach gives the best results considering the median as the main quality measure as discussed earlier.
-
The unbalanced data distribution, regarding the I D partition, postpone a final conclusion about the improvement of the model quality to the availability of a more balanced sample.
-
-
Concerning the prediction with DMT basic parameters,
-
The results show that the basic input parameters (P 0,P 1) do not improve the fitness of G 0, when compared with the one given by intermediate parameters.
-
In addition to the previous, the inclusion of u 0 as input parameter does not seem to improve the fitness when compared to the one that considers only the two basic pressions P 0 and P 1. As so, future work should considered other auxiliar data, mainly measured depth, depth of water level, and/or P 2.
-
The available unbalanced data, regarding G 0 distribution, suggests that more tests should be made using G 0 values of higher magnitude (>110).
-
References
Clayton C, Heymann G (2001) Stiffness of geomaterials at very small strains. Géotechnique 51(3):245–255
Fahey M (2001) Soil stiffness values for foundation settlement analysis. In: Balkema L (ed) Proceedings 2nd international conference on pre-failure deformation characteristics of geomaterials, vol 2, pp 1325–1332
Peck R, Hanson W, Thornburn T (1974) Foundation engineering, 2nd edn. Wiley
Lunne T, Robertson P, Powell J (1997) Cone penetration testing in geotechnical practice. Spon E & F N
Marchetti S (1980) In-situ tests by flat dilatometer. J Geotechn Eng Div 106 (GT3):299–321
Cruz N, Devincenzi M, Viana da Fonseca A (2006) Dmt experience in iberian transported soils. In: Proceedings 2nd international flat dilatometer conference, pp 198–204
Cruz N (2010) Modelling geomechanics of residual soils by DMT tests, PhD thesis, Universidade do Porto
Marchetti S (1997) The flat dilatometer: design applications. In: Third geotechnical engineering conference Cairo University
Mayne P (2006) Interrelationships of dmt and cpt in soft clays. In: Proceedings 2nd international flat dilatometer conference, pp 231–236
Hryciw R (1990) Small-strain-shear modulus of soil by dilatometer. J Geotech Eng ASCE 116(11):1700–1716
Hardin B, Blandford G (1989) Elasticity of particulate materials. J Geotech Eng Div 115(GT6):788–805
Jamiolkowski B, Ladd C, Jermaine J, Lancelota R (1985) New developments in field and laboratory testing of soilsladd, c.c. In: XI ISCMFE, vol 1, pp 57–153
Sully J, Campanella R (1989) Correlation of maximum shear modulus with dmt test results in sand. In: Proceedings XII ICSMFE, pp 339–343
Tanaka H, Tanaka M (1998) Characterization of sandy soils using CPT and DMT. Soils Found 38(3):55–65
Marchetti S, Monaco P, Totani G, Marchetti D (2008) From research to practice in geotechnical engineering D.K. Crapps, volume 180, chapter In -situ tests by seismic dilatometer (SDMT). ASCE Geotech Spec. Publ., pp 292–311
Huang Y, Draper N (2003) Transformations, regression geometry and R2. Comput Stat Data Anal 42 (4):647–664
Netlab. http://www1.aston.ac.uk/eas/research/groups/ncrg/resources/netlab/ Accessed 11 Oct 2013
Bishop C (1996) Neural networks for pattern recognition. Oxford university Press
Cortes C, Vapnik V (1995) Support-vector Networks. J Mach Learn 20(3):273–297
Chang C, Lin C (2011) LIBSVM: a library for support vector machines. ACM Trans Intell Syst Technol:2:27:1–27:27
Vapnik V (1998) Statistical learning theory. Wiley, New York
Schölkopf B, Smola A, Williamson R, Bartlett P (2000) New support vector algorithms. Neural Comput 12:1207–1245
Hollander M, Wolfe DA (1973) Nonparametric statistical methods. Wiley, New York
Acknowledgment
The authors would like to thanks the anonymous reviewers for their valuable comments and suggestions to improve the quality of the paper.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Cruz, M., Santos, J.M. & Cruz, N. Using neural networks and support vector regression to relate marchetti dilatometer test parameters and maximum shear modulus. Appl Intell 42, 135–146 (2015). https://doi.org/10.1007/s10489-014-0576-3
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10489-014-0576-3