
Abstract
A new electronically tunable current-mode multiphase sinusoidal oscillator based on translinear current conveyors is presented. The proposed oscillator circuit, which employs only one translinear current conveyor and one grounded capacitor for each phase, can generate arbitrary N output current equal-amplitude signals that are equally spaced in phase (N being even or odd), all at high output impedance terminals. The frequency of oscillation and the condition of oscillation can be controlled electronically and independently through the bias current of the translinear current conveyor. The proposed structure also has simple circuitry, low-component count, and is highly suitable for integrated circuit implementation. The theoretical results were verified by PSPICE simulation. In addition, the modification of the N sinusoidal oscillators to construct a programmable multiphase oscillator is also discussed.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
Multiphase sinusoidal oscillators (MSOs) have a wide range of application in communication, signal processing, power controlled systems, instrument control, and measurement system. As a result, a number of MSO circuits based on different design techniques have been developed in the literature [1–13]. The early systems by Kaplan and Bachar [1], Rahman and Haque [2], Ramamurti and Ramaswami [3], and Mikhael and Tu [4] exhibit good performance, but these circuits suffer complex circuitry from using a large of both active and passive components. Simpler circuits are available in the MSO based on the active-R technique [5, 6], but it lacks the electronic tunability. Although the OTA-C realization [7] enjoys electronic tunability, it suffers from limited output voltage swing and temperature sensitivity. Additionally, the voltage-mode OTA-based MSO generally needs buffer to reduce the high output impedance associated with transductance amplifiers which make the circuits limit to OTA that on chip buffers are already available with some OTAs, e.g., LM13600, LM13700. In [8, 9], two MSO circuits, using a second-generation current conveyor (CCII) as an active component, have been proposed. However, a junction field-effect transistor (JFET) and three current conveyors are required for each phase in order to achieve electronically tenability. The current feedback operational amplifier (CFOA)-based MSO circuit is described by Wu et al. [10] exploits the internal pole of the device to operate at relatively high frequencies, but this approach requires access to the amplifier compensation terminal. This requirement is very restrictive since only one such device (AD844) is current available. The techniques to realize a MSO using operational amplifiers (op-amps) have been proposed [11, 12]. However, the drawback of these circuits is the well-know limitations of the op-amps. Moreover, they utilize too many external passive components and a number of them float.
Recently, a new technique for realizing MSO by using second-generation current controlled current conveyors (CCCIIs) is proposed by Abuelma’atti and Al-Qahtani [13]. The circuit exploits the parasitic resistance (Rx) of the CCCIIs which make electronic tunability possible through the bias current. The advantages of this circuit identified by the authors are the following:
-
(1)
The circuit enjoys simple structure which can be easily configured to realize either odd- or even-phase output currents using the minimum number of active and passive components per phase.
-
(2)
The circuit uses grounded capacitors with no externally connected resistors; this would be attractive for integration.
-
(3)
The circuit possesses independent controls of the frequency of oscillation. Thus, the frequency of oscillation can be controlled by adjusting a current without disturbing the condition of oscillation and the condition of oscillation can be controlled without disturbing the frequency of oscillation; this would pave the way for electronic tunability.
-
(4)
The circuit provides high output impedances.
With respect to (1)–(4) above, the circuit of Abuelma’atti and Al-Qahtani [13] is a good current-mode current-controlled MSO circuit for IC fabrication. However, it suffers from two disadvantages. First, the circuit employs two grounded capacitors for each stage. Second, its condition of oscillation is adjusting by tuning the ratio of external grounded capacitors, which is not well controlled. In integrated circuits, controlling the circuit parameters electronically is much easier to realize that changing the values of passive components.
In this paper, we pursue the objective of developing a current-controlled MSO that is suitable for IC fabrication. We propose a new circuit that improves on the advantages of the circuit of Abuelma’atti and Al-Qahtani [13] while overcoming the disadvantages. In particular, the circuit has the following features:
-
(1)
It utilizes a multiple-output CCCII with controlled gain and a grounded capacitor for each stage.
-
(2)
It can realize either odd- or some even-phase output currents using the minimum number of passive components per section.
-
(3)
It provides the condition of oscillation by adjusting the bias currents without disturbing the frequency of oscillation.
-
(4)
It uses grounded capacitor with no externally connected resistors and hence is very suitable for IC fabrication.
-
(5)
The frequency of oscillation can be controlled by adjusting a bias current.
-
(6)
It possesses high output impedance current sources.
2 Circuit description
The CCCII can be used to implement several applications such as amplifiers, filters, oscillators and non-linear circuits. The well-known schematic implementation for CCCII, implemented with bipolar technology is shown in Fig. 1 [14]. According to Fig. 1, it can be seen that CCCII has an unity voltage gain between terminal Y and X, then has an unity current gain between terminal X and Z, and also has an high impedance level between terminal Y and Z that in ideal is equal to infinite, whereas the X terminal has a RX. The parasitic X-input resistance, RX can be obtained as [14]

Schematic implementation for plus-type CCCII
The RX is an inner resistance of a translinear mixed loop (Q1 to Q4) with grounded resistor equivalent controlled by dc bias current I o, where V T is the thermal voltage. The multiple-output translinear bipolar CCCII with controlled gain can be obtained by modifying the original circuit of the CCCII in Fig. 1 and adding additional current mirror with adjustable gain as shown in Fig. 2 [15] to obtain the required current gain at Z terminal. Also, the multiple-output translinear current conveyor can be obtained by adding additional current mirrors and cross-coupled current mirrors to obtain the required plus and minus type outputs [13]. Figure 3 shows the schematic diagram of the multiple-output tranlinear plus/minus CCCII with controlled current gain. In this figure, a CCCII with controlled current gain has an unity voltage gain between terminals Y and X and tunable k current gain between terminals X and Z. The latter property makes it different from a current conveyor. The schematic of the CCCII with controlled gain in Fig. 3 is characterized by the relationship

Current mirrors with adjustable current gain: a positive-type; b negative-type

Multiple-output plus/minus CCCII with controlled gain: a bipolar implementation; b circuit symbol
The current gain k of the current conveyor can be expressed by [15, 16]
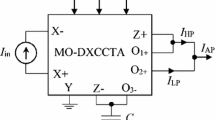
We can note that the signal current is amplified by the factor k and this factor can be varied linearly controlled by varying I a or I b . Figure 4 displays the basic building block of the proposed multiphase oscillator. It consists of one translinear current conveyor and one grounded capacitor. The basic current transfer function of this circuit can be given by

Basic building block of the proposed multiphase oscillator
The proposed odd-order MSO is shown in Fig. 5. The system consists of N cascaded translinear current conveyor-based current-mode lossy integrators of Fig. 4 with the output kZ- of the Nth stage being fed back to the input of the first stage. Each stage uses two minus-type output terminals and one plus-type output terminal of translinear current conveyor, provides an additional 180° phase shift. Using (3)–(4), the loop-gain of the proposed structure in Fig. 5 can be expressed as

Proposed N-phase sinusoidal oscillator
The system can be set to provide a sinusoidal oscillation, if the loop gain is unity [17]:
That is
Equation 7 is the characteristic equation for an Nth-order (N = odd integer) multiphase sinusoidal. By rearranging (7) and equating the imaginary and real parts to be zero, the frequency of oscillation and the condition of oscillation will have a solution only if the value of N is odd (N ≥ 3). The results are obtained in Table 1. Using (4) and the results of Table 1, it is easy to show that the outputs at each of the sections of the scheme are symmetrical at the frequency of oscillation, i.e. equal in amplitude and equally spaced in phase at the oscillating frequency [5]. According to Table 1, it can be seen that the frequency of oscillation and the condition of oscillation can be orthogonally controlled. The condition of oscillation can be adjusted the bias currents I a or I b while the frequency of oscillation can be varied by the resistors RX through the bias currents I o . The use of multiple-output CCCII provides an inverted version of the output current, hence there are 2N = 6, 10, 14,…, even-phase available output currents. This shows that the scheme in Fig. 5 can generate odd-phase and some even-phase MSO into a single circuit. Since the output impedances of the CCCIIs are very high, the MSO current outputs can be directly connected to the next stage without requiring the additional current follower circuits. Furthermore, it can note that the proposed MSO can also be realized even/odd order multiphase oscillator in a single system as same as recent work [13]. It is formed of an odd-order of basic building blocks. While the transfer function of the CCCII3 block, which uses three minus-type Z-outputs and one plus-type Z-output, provides an addition 180° phase shift, the other blocks are identical, with each block using two plus-type Z-outputs and one minus-type Z-output. Namely, the new system consists of one inverting lossy integrator and N-1 non-inverting lossy integrators. From the realization of the system explained, using (4), the loop-gain for Nth order can be expressed by
The system can be set to provide a sinusoidal oscillation, if the loop gain is unity [17]:
or
Equation 10 is the characteristic equation for an Nth-order (N = even/odd integer) MSO. By rearranging (10) and equating the imaginary and real parts to zero, the frequency of oscillation and the condition of oscillation can be obtained. The results are shown in Table 2. It clears that the multiphase oscillator for odd-number and/or even-number of phase can be achieved into a single system. The use of multiple-output CCCII provides an inverted version of the output current as the same the system of Fig. 5. Typically of oscillator circuit, two characteristics must be considered. The first is the condition of oscillation and second one is the frequency of oscillation. From Tables 1 and 2, one finds that the proposed multiphase oscillators use the output current gain of CCCII to control the condition of oscillation and the R X to vary the frequency of oscillation. From (3), it shows that the current gain of CCCII also is independent of temperature. This means that the varying of temperature can not change the condition of oscillation. Again, from (1) it can be seen that the value of R X is the ratio between V T and 2I o , where V T is the thermal voltage. The thermal voltage is the temperature-dependent parameter of bipolar junction transistor (BJT). Thus, the thermal voltage of BJTs directly affects to its frequency of oscillation. However, this problem may be improved by using the method in [18].
3 Effect of CCCII non-idealities
The previous realization has been based on the assumptions that the CCCIIs have ideal characteristics. However, in a practical realization, the non-ideal current transfer and voltage transfer that contribute to error from the ideal performance are presented. Taking into account the non-idealities of a CCCII, Eq. 2 can be modified as
where α = 1 − ε, |ε| ≪ 1 represents the voltage tracking error, β = 1 − δ, |δ| ≪ 1 represents the current tracking error. The non-ideal current transfer function for the circuit of Fig. 5 becomes
The non-ideal loop gain for the circuit of Fig. 5 becomes
or
From Eq. 14, it implies that the CCCII non-idealities will affect only the condition of oscillation. This problem can be easily improved by increasing the current gain of CCCII.
4 Programmable MSO
From the realization of the N-phase (N = odd/even integer) sinusoidal oscillator discussed in Sect. 3, the N-phase sinusoidal oscillator can be easily extend to the realization a programmable MSO. Figure 6 shows the programmable N-phase (N = odd/even integer) sinusoidal oscillator. The programmable oscillator uses the switches to select the phase and the condition of oscillation. It can see that the number of phase and the condition of oscillation can be programmed by SW1 to SW7, where 1 indicates a closed switch and 0 indicates an open switch. The operation of programmable MSO is summarized in Table 3. Figure 6a shows a current-scaling programmable current source. Each reference current is established by following each the condition of oscillations of oscillator. Let I b is a constant current source. Starting from the SW1, the reference current should be more than 2 times of I b . The current mirrors put out a current equal to the reference value for bias the CCCIIs. Moving to the SW N , the reference current should be more than θ times of I b and mirrored by current mirror to bias the CCCIIs.

Programmable MSO: a N-phase (N = even/odd integer) oscillator, b a current-scaling programmable current source
5 Simulation results
To the theoretical analysis of the proposed MSO, a three-phase sinusoidal oscillator design example has been simulated through PSPICE simulation program. The PSPICE model parameters for NPN and PNP transistors are simulated that be taken from AT&T ALA 400-CBIC-R [19] as listed in Table 4. The CCCII with controlled current gain as shown in Fig. 3 is simulated using the BJT. The power supply is V CC = −2.5 V, V EE = 2.5 V. The proposed method was simulated for N = 3 and N = 5 with C = 5 nF and I o = 50 μA. Figure 7 presents the simulation results of a three-phase sinusoidal oscillator (N = 3) with I a = 220 μA, I b = 100 μA where I a was designed to be larger than 2 times of I b to ensure the oscillation will start. The design frequency using these values for N = 3 is 220.5 kHz while the results obtained simulations show a frequency of 210 kHz. Figure 8 shows sinusoidal waveform for six-phase sinusoidal oscillator. Figure 9 presents the simulation results of a five-phase sinusoidal oscillator (N = 5) with I a = 150 μA and I b = 100 μA. The design frequency using these values is 92.69 kHz. The results obtained simulations show a frequency of 95 kHz. Figure 10 shows sinusoidal waveform for ten-phase sinusoidal oscillator. It can be confirmed from Figs. 8 and 10 that the multiple-output plus/minus CCCII-based MSO can provide 2N-phase output currents.

Simulated output waveforms of three-phase oscillator

Simulated output waveforms of six-phase oscillator

Simulated output waveforms of five-phase oscillator

Simulated output waveforms of ten-phase oscillator
6 Conclusions
In this paper, a new electronically tunable MSO circuit has been presented. The proposed MSO has a simple configuration which uses a CCCII with controlled current gain and a grounded capacitor per phase. The MSO circuit can be configured to provide an arbitrary number of N with equal-amplitude equally special in-phase output current by digital controlled switches. The condition of oscillation and the frequency of oscillation are independent controlled. The proposed MSO enjoys simple structure, an electronically tunable and suitable for IC implementation. The proposed rectifier yields advantages as following:
-
(1)
The proposed oscillator using the number of active devices is roughly equal to the MSOs from Abuelma’atti and Al-Qahtani [13]. However, the proposed MSO uses one grounded capacitor whereas the previous MSO uses two grounded capacitors, therefore the proposed MSO is more suitable for IC fabrication than the MSO in [13].
-
(2)
The proposed MSO is more easily control the condition of oscillation than the MSO in [13].
-
(3)
The proposed MSO is more suitable for IC fabrication and easier control the condition of oscillation when compared with the other electronically tunable MSOs, e.g., OTAs-based structure in [7], CCIIs-based structures in [8, 9].
Simulation results are also used to confirm the characteristics of the proposed circuits. Finally, the extension of the MSO structure to implement a programmable MSO structure is also discussed.
References
Kaplan, B. Z., & Bachar, S. T. (1979). A versatile voltage controlled three phase oscillator. IEEE Transactions on Industrial Electronics and Control Instrumentation, 26, 192–195.
Rahman, A., & Haque, S. E. (1982). A simple three-phase variable-frequency oscillation. International Journal of Electronics, 53, 83–89.
Ramamurti, V. P., & Ramaswami, B. (1982). A novel three-phase reference sinewave generator for PWM inverter. IEEE Transactions on Industrial Electronics, 29, 235–240.
Mikhael, W. B., & Tu, S. (1984). Continuous and switched-capacitor multiphase oscillators. IEEE Transactions on Circuits and Systems, 31, 280–293.
Abuelma’atti, M. T., & Almansoury, W. A. (1987). Active-R multiphase oscillator. IEE Proceeding, Part G, 134, 292–293.
Stiurca, D. (1994). On the multiphase symmetrical active-R oscillators. IEEE Transactions on Circuits and Systems II: Analog and Digital Signal Processing, 41, 156–158.
Khan, I. A., Ahmed, M. T., & Minhaj, N. (1992). Tunable OTA-based multiphase sinusoidal oscillators. International Journal of Electronics, 72, 443–450.
Hou, C., & Shen, B. (1995). Second-generation current conveyor-based multiphase sinusoidal oscillators. International Journal of Electronics, 78, 317–325.
Wu, D.-S., Liu, S.-I., Hwang, Y.-S., & Wu, Y.-P. (1995). Multiphase sinusoidal oscillator using second-generation current conveyors. International Journal of Electronics, 78, 645–651.
Wu, D.-S., Liu, S.-I., Hwang, Y.-S., & Wu, Y.-P. (1995). Multiphase sinusoidal oscillator using the CFOA pole. IEE Proceeding on Circuits Devices and Systems, 142, 37–40.
Gift, S. J. G. (1997). Multiphase sinusoidal oscillator system using operational amplifiers. International Journal of Electronics, 83, 61–67.
Gift, S. J. G. (1998). Multiphase sinusoidal oscillator using inverting-mode operational amplifiers. IEEE Transactions on Instrumentation and Measurement, 47, 986–991.
Abuelma’atti, M. T., & Al-Qahani, M. A. (1998). A new current-controlled multiphase sinusoidal oscillator using translinear current conveyor. IEEE Transactions on Circuits and Systems-II: Analog and Digital Signal Processing, 45, 881–885.
Fabre, A., Saaid, O., Wiest, F., & Boucheron, C. (1996). High Frequency applications based on a new current controlled conveyor. IEEE Transactions on Circuit and Systems-I, 43, 82–91.
Toumazou, C., Lidgey, F. J., & Haig, D. G. (1990). Analogue IC design: The current-mode approach. London: Peter Peregrinus.
Fabre, A., & Mimeche, N. (1996). Class A/AB second generation current conveyor with controlled current gain. Electronics Letters, 43, 82–91.
Sedra, A. S., & Smith, K. C. (1987). Microelectronic circuits. New York: Holt Rinehart and Winston, Inc.
Surakampontorn, W., Riewruja, V., Kumwachara, K., & Fongsamut, C. (1998). Temperature compensation of translinear current conveyor and OTA. Electronics Letters, 34, 707–709.
Frey, D. R. (1993). Log domain filter: An approach to current mode filtering. IEE Proceedings Part G of Circuits, Devices and Systems, 140, 406–416.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Kumngern, M., Chanwutitum, J. & Dejhan, K. Electronically tunable multiphase sinusoidal oscillator using translinear current conveyors. Analog Integr Circ Sig Process 65, 327–334 (2010). https://doi.org/10.1007/s10470-010-9470-z
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10470-010-9470-z