
Abstract
In this paper, we revisit a host–parasite system with multiple parasite strains and superinfection proposed by Nowak and May (Proc R Soc Lond B 255(1342):81–89, 1994), and study its global dynamics when we relax the two strict conditions assumed therein. As for system with two parasite strains, we derive that the basic reproduction number \(R_0\) is the threshold condition for parasite extinction and the invasion reproduction number \(R_i^j\ (i,j=1,2,i\ne j)\) is the subthreshold condition for coexistence of two parasite strains. As for system with three parasite strains, we are surprised to discover the global stability of parasite-free and coexistence equilibrium, which is distinct from the previous result. Furthermore, for system with n strains, we obtain the global asymptotical stability of the parasite-free equilibrium, conjecture a general result on the global stability of coexistence equilibrium and provide two numerical examples to testify our conjecture.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
It is well known that humans, animals and plants can be multiply infected by different genotypes of the same parasite species due to parasite interactions (Read and Taylor 2001; Hood 2003; Stunzenas 2001; Futuyma 2013). Such interactions between multiple parasite strains within the host are complex and may directly affect the transmission success of parasites, implying that these interactions have important effects on epidemiology, such as predicting the persistence and spread of diseases in natural systems. Because of this, mathematical models have been developed to explore the infection dynamics (May and Anderson 1990; Frank 1992).
During the past three decades, many experts have dedicated to understanding multiple infections for their potential effects on the evolution of parasite virulence [which has been defined as the parasite-induced mortality of the host (Bull 1994)], and numerous mathematical models have been proposed to emphasize this point (May and Anderson 1990; Frank 1992; Bremermann and Thieme 1989; Antia et al. 1994). It is argued that a parasite strain with higher virulence may have a competitive advantage over less virulent strains within the host. However, those models in general ignore the possibility of coinfection (implying that hosts may be infected by multiple parasite strains at one time) and superinfection (implying that the second strain can infect hosts already infected by the first strain). Models considering coinfection or superinfection have emerged more complex phenomena than those parasite strains occurring independently (Mosquera and Adler 1998; Pugliese 2002; Martcheva and Thieme 2003; Iannelli et al. 2005; Huijben et al. 2010; Choisy and de Roode 2010; Xu et al. 2012; Denysiuk et al. 2017). For example, Pugliese (2002) found that parasite strains with superinfection can coexist when hosts are density-dependent.
Nowak and May in (1994) discussed the important effects of superinfection on the evolution of parasite virulence by proposing the following multi-strain model.
where x and \(y_i\) denote the uninfected and infected hosts, respectively. All parameters \(k,u,\beta _i,v_i,s\) are positive. k is the constant immigration rate of uninfected hosts, u is their natural mortality, \(\beta _i\) shows the infectivity of parasite strain i and \(v_i\) defines the virulence of strain i, implying the parasite-induced mortality. The parameter s stands for the superinfection rate. In particular, if \(s>1\) then superinfection is more likely to occur than the regular infection while if \(0<s<1\) then superinfection is less likely to occur than the regular infection. If \(s=0\) there is no superinfection. The author provided the simple mathematical analysis based on the following assumptions.
- (i)
Assuming that the immigration of uninfected hosts exactly balances the death of uninfected or infected hosts, that is, \(k=ux+uy+\sum \limits _{i=1}^nv_iy_i\). Without loss of generality, set \(x+y=1\), where \(y=\sum \limits _{i=1}^ny_i\).
- (ii)
Assuming that all parasite strains have the same infectivity \(\beta \) and differ only in their virulence, \(v_i\).
Under the above assumptions, Nowak and May in (1994) constructed a specific equilibrium in a recursive “bottom-up” way. Furthermore, they showed the complex dynamics for cases of \(n=2\) and \(n=3\) via simulations, rather than mathematical analysis.
Note that above assumptions are quite restrictive and even unreasonable. For natural system, the immigration of uninfected hosts does not always exactly balances the death of uninfected or infected hosts. Furthermore, parasite strains with different infectivity are widely found in the natural world and ecosystem. Many papers have pointed out this, see Pugliese (2002), Alizon (2013), Boldin and Diekmann (2008) and Zhang et al. (2007). It is of interest to investigate the model relaxing those strict assumptions (i)–(ii), i.e., k is a positive constant, the total proportion or number of hosts is variable and the infectivity of parasite strains are different. What will happen to the dynamical behaviors of systems with two parasite strains and three parasite strains, respectively?
Motivated by the above ideas, firstly, we analyze the global dynamical behaviors of system (1) with two parasite strains which takes the form as follows.
And then, we investigate the global dynamical behaviors of system (1) with three parasite strains which can be written as
Furthermore, we make some comparisons with the previous phenomena observed in Nowak and May (1994). To the best of our knowledge, no work has been done for system (2) or system (3) without the strict assumptions (i)–(ii).
Lastly, we study the global dynamical behaviors of the full system (1) concerning on the parasite-free and coexistence of n parasite strains equilibria.
This paper proceeds as follows. We introduce the basic and invasion reproduction numbers, and make a fully mathematical analysis on the global stability of system (2), and present some numerical simulations showing the effects of superinfection on the dynamics in the next section. In Sect. 3, we are surprised to discover the global stability of parasite-free and coexistence equilibrium for system (3), which is distinct from the previous result. As for the general system (1), in Sect. 4, we show the global stability of parasite-free equilibrium and the existence of coexistence equilibrium, and propose a conjecture on the global stability of coexistence equilibrium, which is illustrated by two numerical examples. Finally, we end this paper with discussions and conclusions in Sect. 5.
2 Dynamical Behaviors of System (2)
We set the initial conditions as \(x(0)>0\) and \(y_i(0)\ge 0\) for \(i=1,2.\) Obviously, solutions of system (2) are defined on \(t\in [0,\infty )\) and remain nonnegative for all \(t\ge 0.\) Let \(n=x+y_1+y_2\) denote the total population size of the hosts. Thus we obtain that
It is easy to check that solutions of system (2) are nonnegative and bounded in the following invariant set
For convenience, we introduce an equivalent Routh-Hurwitz criterion for \(3\times 3\) real matrix. Let J be a \(3\times 3\) real matrix and have the following form
Its second additive compound matrix (Li and Wang 1998; Li et al. 1999) is
We state the following equivalent Routh-Hurwitz theorem.
Lemma 1
(Liu et al. 2011) Jis stable (i.e. each eigenvalue ofJhas negative real part) if and only if\(\mathrm{tr}(J)<0, \det (J)<0\), and\(\det (J^{[2]})<0\).
2.1 The Basic Reproduction Number and Existence of Equilibria
In this subsection, we introduce the basic reproduction number and two invasion reproduction number, and show the existence of equilibria for system (2).
It is easy to obtain that system (2) always exists a parasite-free equilibrium \(E_0(x_0,0,0)\), where \(x_0={k}/{u}\). According to the concept of next generation matrix (Diekmann et al. 1990) and reproduction number presented in van den Driessche and Watmough (2002), it is easy to obtain the basic reproduction number for system (2)
Here, \(R_i\) is the basic reproduction number for strain \(i,\ i=1,2\). \(\beta _i{k}/{u}\) denotes the number of susceptible hosts that will become infected per unit of time. Note that the mean life span of strain i within a host is \({1}/{(u+v_i)}\). Thus, \(R_i\) denotes the number of secondary infections produced by an infected parasite during its lifespan.
From system (2), we can obtain that, besides \(E_0\), the following exclusive equilibria are feasible under the conditions on \(R_i,\ (i=1,2)\). Namely, we have
- (i)
The strain one exclusive equilibrium \(\bar{E}_1(\bar{x}_1,\bar{y}_1,0)\) exists if and only if \(R_1>1\), where \(\bar{x}_1={k}/{(uR_1)}\) and \(\bar{y}_1={u}(R_1-1)/{\beta _1}\).
- (ii)
The strain two exclusive equilibrium \(\bar{E}_2(\bar{x}_2,0,\bar{y}_2)\) exists if and only if \(R_2>1\), where \(\bar{x}_2={k}/{(uR_2)}\) and \(\bar{y}_2={u}(R_2-1)/{\beta _2}\).
Now, we show that system (2) has a unique coexistence equilibrium \(E^*(x^*,y_1^*,y_2^*)\) under some suitable conditions. Two other reproduction numbers, namely, the invasion reproduction numbers \(R_2^1\) and \(R_1^2\), are introduced. The invasion reproduction number of strain one in our case is given by
Obviously, \(R_1^2\) is a decreasing function of s. Thus, superinfection decreases the invasion capability of strain one. \(R_1^2\) has a clear biological interpretation. Consider the case when one infected host with strain one is introduced into a population in which hosts with strain two have sizes \(\bar{x}_2\) and \(\bar{y}_2\). We note that \({\beta _1\bar{x}_2}/{(u+v_1)}\) is the number of secondary infections produced by the uninfected hosts with strain two, and \({s\beta _2\bar{y}_2}/{(u+v_1)}\) denotes the number that one infected host with strain one can be superinfected into the infected hosts with strain two. Thus, \(R_1^2\) denotes the number of secondary infections that one infected individual with strain one will produce in a population in which hosts with strain two is at equilibrium \(\bar{E}_2(\bar{x}_2,0,\bar{y}_2)\).
Analogously, we obtain the invasion reproduction number of strain two as
Obviously, \(R_2^1\) is an increasing function of s. Therefore, superinfection increases the invasion capability of strain two. \(R_2^1\) has a clear biological interpretation and it gives the number of secondary infections that one infected individual with strain two will produce in a population in which hosts with strain one is at equilibrium \(\bar{E}_1(\bar{x}_1,\bar{y}_1,0)\).
For convenience, the invasion reproduction numbers can be rewritten as
Now, we show that those two invasion reproduction numbers determine the existence of coexistence equilibrium \(E^*\). In fact, solving system (2) for non-trivial \(x^*\) and \(y_1^*, y_2^*\), we obtain that \(E^*(x^*,y_1^*,y_2^*)\), where
The coexistence equilibrium \(E^*\) is feasible if and only if \(x^*>0\), \((u+v_2)-\beta _2x^*>0\) and \(\beta _1x^*-(u+v_1)>0\) are satisfied. That is,
Actually, we can check that \(x^*>{(u+v_1)}/{\beta _1}\) is equivalent to the inequality \(R_2^1>1\) while \(x^*<{(u+v_2)}/{\beta _2}\) is equivalent to the inequality \(R_1^2>1\), which are shown in Appendix A. Also, one can see the another method to show the existence of \(E^*\), please refer to Appendix D. From the above discussions, we summarize them in the following theorem.
Theorem 1
For system (2),
- (i)
there always exists a parasite-free equilibrium\(E_0\);
- (ii)
the strain one exclusive equilibrium\(\bar{E}_1\)exists if and only if\(R_1>1\);
- (iii)
the strain two exclusive equilibrium\(\bar{E}_2\)exists if and only if\(R_2>1\);
- (iv)
the unique coexistence equilibrium\(E^*\)exists if and only if\(R_1^2>1\)and\(R_2^1>1\).
Remark 1
Nowak and May in (1994) only analyzed the existence of parasite-free equilibrium and two boundary equilibria. Here, we introduced two invasion reproduction numbers and pointed out the existence of coexistence equilibrium.
2.2 Stability of Equilibria
In this subsection, we concern on the local and global stability of all possible equilibria by employing more modern matrix stability and Lyapunov functions.
Concerning on the local stability of all possible equilibria, we have the following results.
Theorem 2
The parasite-free equilibrium\(E_0\)is locally asymptotically stable if\(R_0<1\), and it is unstable if\(R_0>1\).
For the proof of Theorem 2, please see Appendix B.
Theorem 3
Assume that\(R_1>1\). Then\(\bar{E}_1\)is locally asymptotically stable if\(R_2^1<1\), and it is unstable if\(R_2^1>1\), where\(R_2^1\)is defined in (5).
For the proof of Theorem 3, please see Appendix C. Similarly, we have the conclusion on the local stability of \(\bar{E}_2\).
Theorem 4
Assume that\(R_2>1\). Then\(\bar{E}_2\)is locally asymptotically stable if\(R_1^2<1\), and it is unstable if\(R_1^2>1\), where\(R_1^2\)is defined in (4).
Theorem 5
Assume that\(R_1^2>1\)and\(R_2^1>1\). Then the coexistence equilibrium\({E}^*\)is locally asymptotically stable.
Proof
The Jacobian matrix at \({E}^*\) for the right hand side of system (2) is given by
and its second additive compound matrix is
Then, we have
which imply that \(J(E^*)\) is stable according to Lemma 2.1. Thus, \(E^*\) is locally asymptotically stable whenever it exists. This completes the proof of Theorem 5. \(\square \)
Concerning on the global stability of all possible equilibria, we have the following results.
Theorem 6
The parasite-free equilibrium\(E_0\)is globally asymptotically stable if\(R_0<1\).
By considering the Lyapunov function as \(V_0=y_1+y_2\) and using Lyapunov–LaSalle theorem, Theorem 6 follows.
Theorem 7
Assume that\(R_1>1\). Then\(\bar{E}_1\)is globally asymptotically stable if\(R_2^1<1\).
Theorem 7 is proved by defining the Lyapunov function as \(V_1=(x-\bar{x}_1-\bar{x}_1\ln x)+(y_1-\bar{y}_1-\bar{y}_1\ln y_1)+y_2\) and using Lyapunov–LaSalle theorem. Similarly, we have the conclusion concerning on the global stability of \(\bar{E}_2\).
Theorem 8
Assume that\(R_2>1\). Then\(\bar{E}_2\)is globally asymptotically stable if\(R_1^2<1\).
Theorem 9
Assume that\(R_1^2>1\)and\(R_2^1>1\). Then the coexistence equilibrium\({E}^*\)is globally asymptotically stable.
Proof
Since \(E^*\) is the solution of system (2) and then satisfies the following equations.
Then system (2) can be rewritten as
Now, we define a Lyapunov function as follows.
Its derivative along the solutions of system (8) is
Furthermore, \(V'=0\) holds if and only if \(x=x^*\). We set
Next, it would like to show the largest positively invariant subset of L. The set L is a two dimensional plane whose projection on \(y_1\)-\(y_2\) plane is the straight line
or in this form
Obviously, we observe that
Restricting system (8) on the set L, we obtain the following two-dimensional system
Following the relation (9), system (10) has the following form.
Thus, the derivative of \(Q_0\) along with the solutions of system (11) is
which holds if and only if \(y_1=y_1^*\). When \(x=x^*\) and \(y_1=y_1^*\), we have \(y_2=y_2^*\). Thus, \(M=\{E^*\}\) is the largest positively invariant subset of \(\{(x,y_1,y_2): V'=0\}\). By Lyapunov–LaSalle theorem, solutions with positive initial conditions will approach to \(E^*\). Thus, \(E^*\) is globally asymptotically stable whenever it exists. This finishes the proof of Theorem 9. \(\square \)
Remark 2
Nowak and May in (1994) only proposed the stability of parasite-free and two boundary equilibria. Here, we investigated the effects of the invasion reproduction numbers on the local and global stability of coexistence equilibrium.
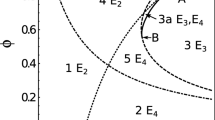
The dynamics of system (2) are summarized, based on \(R_1\) and \(R_2\), in Fig. 1, where stability regions corresponding to different equilibria are shown in \(R_1\)-\(R_2\) plane. We divide the \(R_1\)-\(R_2\) plane into four regions. In region I, \(R_1<1\) and \(R_2<1\), the parasite-free equilibrium, \(E_0\), is the only equilibrium which is globally asymptotically stable. In regions II and III, two exclusive equilibria, \(\bar{E}_1\) and \(\bar{E}_2\), are globally asymptotically stable, respectively. The unique coexistence equilibrium, \(E^*\), exists in the region IV and is globally asymptotically stable in this region.

Schematic illustrations of the global stability regions for equilibria of system (3). The parasite-free equilibrium exists in the whole \(R_1\)–\(R_2\) plane and is global asymptotically stable in region I. Two exclusive equilibria \(\bar{E}_1\) and \(\bar{E}_2\) are global asymptotically stable, respectively, in region II and III. The unique coexistence equilibrium exists and is globally asymptotically stable in region IV
2.3 Numerical Simulations
In this subsection, we devote to investigating the effects of superinfection on the dynamical behaviors of two parasite strains.
Firstly, we study the effect of superinfection on the existence of coexistence for two parasite strains. If we set the superinfection rate to be zero, that is, \(s=0\), then it follows from (6) that the invasion reproduction numbers \(R_2^1\) and \(R_1^2\) are
Therefore, the strain one exclusive equilibrium \(\bar{E}_1\) (\(\bar{E}_1\) exists when \(R_1>1\)) is stable if \(R_2<R_1\) and unstable if \(R_2>R_1\). A symmetric result holds for the strain two exclusive equilibrium \(\bar{E}_2\). Thus, the coexistence of two parasite strains is impossible. Fig. 2 shows this point clearly. Thus, superinfection ensures the coexistence of two parasite strains.

Time plots and their corresponding phase portraits of the infected hosts \(y_1\) and \(y_2\) showing that strain i with a larger value of \(R_i\) excludes strain \(j(i\ne j)\). It shows that strain one excludes strain two (see a1, b1) for \(R_2<R_1\) and strain two excludes strain one (see a2, b2) for \(R_2>R_1\). Here, \(k=10, u=0.5, v_1=0.4, v_2=0.9\) and different \(\beta _i, i=1,2\). In a1, b1, \(\beta _1=0.1\) and \(\beta _2=0.12\), corresponding to \(R_2=1.71<2.22=R_1\) while \(\beta _1=0.1\) and \(\beta _2=0.18\) in a2, b2, \(R_2=2.57>2.22= R_1\)
Furthermore, we consider how superinfection influences the basic reproduction number and invasion reproduction numbers. Obviously, system (2) has a unique coexistence equilibrium for two parasite strains when \(R_1^2>1, R_2^1>1\). It is interesting to study whether the unique coexistence equilibrium exists or not when \(R_2<1\). The answer is definitively true. It follows from (6) that \(R_1^2>1\) always holds when \(R_2<1\) and \(R_1>1\), while \(R_2^1>1\) can hold according to larger superinfection. Figure 3 implies that superinfection increases the competitive ability of parasite strain two.
Finally, we examine how the invasion reproduction numbers and coexistence regions depend on the superinfection rate. In Fig. 4, we plot \(R_1^2\) and \(R_2^1\) as a function of \(v_1\) and \(v_2\). Compared Fig. 4b and c, it is obvious that the coexistence region is wider for the case of larger superinfection rate and coexistence is more likely to occur when the virulence of parasite strains are large.

Time plots of the infected hosts \(y_1\) and \(y_2\) for the case when \(R_2<1\). It shows that coexistence is impossible when \(R_2^1=0.93<1\) for \(s=0.3\) (see a), while it turns out possible when \(R_2^1=1.14>1\) for \(s=0.7\) (see b). Here, \(k=10, u=0.5, v_1=0.4, v_2=0.9, \beta _1=0.1,\beta _2=0.12\)

Plots of \(R_1^2\) and \(R_2^1\) as the functions of \((v_1,v_2)\). It shows that there is no coexistence region when \(s=0\) (see a). The coexistence region appears and expands when s increases (compared b, c). The shadow region of \(R_1^2>1\) and \(R_2^1>1\) provides the coexistence region for two parasite strains. Here, \(k=10, u=0.5, v_1=0.4, v_2=0.9, \beta _1=0.1,\beta _2=0.12\) and different s
3 Dynamical Behaviors of System (3)
In this section, we investigate the global stability of system (3). Based on the analysis in Sect. 2, it is obvious that all possible equilibria are globally asymptotically stable if they are locally asymptotically stable for system (2). Here, we only focus our attention on the global stability of parasite-free equilibrium and coexistence equilibrium of three parasite strains.
The basic reproduction number of system (3), denoted by \(\widetilde{R}_{0}\), can be written as
where \(R_i={\beta _i k}/{(u+v_i)u}\) denotes the basic reproduction number of parasite strain i. It is easy to check that system (3) always exists a parasite-free equilibrium \(\widetilde{E}_{0}(\widetilde{x}_{0},0,0,0)\), where \(\widetilde{x}_{0}={k}/{u}\), and admits a unique coexistence equilibrium (positive solution) \(\widetilde{E}^*\) denoted by \(\widetilde{E}^*=(\widetilde{{x}}^*,\widetilde{y}_{1}^*, \widetilde{y}_{2}^*,\widetilde{y}_{3}^*)\). The existence of \(\widetilde{E}^*\) is shown in Appendix E, we omit it here.
For the global stability of \(\widetilde{E}_{0}\), we have the following result.
Theorem 10
The parasite-free equilibrium\(\widetilde{{E}}_{0}\)of system (3) is globally asymptotically stable if\(\widetilde{R}_{0}<1\).
By considering Lyapunov function \(\widetilde{V}_{0}=y_1+y_2+y_3\), Theorem 10 follows.
Now, we are in the position to prove the global stability of \(\widetilde{E}^*\) when it exists.
Theorem 11
The coexistence equilibrium\(\widetilde{E}^*\)of system (3) is globally asymptotically stable when it exists.
Proof
Since \(\widetilde{E}^*\) is the solution of system (3) and hence satisfies the following equations
Then, system (3) can be rewritten as
Consider a Lyapunov function
Its derivative along the solutions of system (13) yields
Moreover, \(\widetilde{V}'=0\) holds if and only if \(x=\widetilde{x}^*\). We set
We would like to check the largest positively invariant subset of \(\widetilde{L}\). The set \(\widetilde{L}\) is a three dimensional hyperplane as the form
or in this form
Restricting system (13) on the set \(\widetilde{L}\), we obtain the following three-dimensional system.
Furthermore, using the relation of (14), one has
Now, we show that \(\{\widetilde{E}^*\}\) is the largest positively invariant subset of \(\widetilde{L}\) based on system (15). Denote \(\widetilde{L}_0\) be the positively invariant subset of \(\widetilde{L}\). For any \((y_1^0,y_2^0,y_3^0)\in \widetilde{L}_0\), the orbit through \((y_1^0,y_2^0,y_3^0)\) is denoted as \((y_1,y_2,y_3)\in \widetilde{L}_0\).
In the following, we will show that \(y_1^0=\widetilde{y}_1^*\) by the way of finding contradiction if not so. Assuming that \(y_1^0\ne \widetilde{y}_1^*\) holds, then we can make the following discussions. Solving the first equation of (15) yields
If \(y_1^0>y_1^*\), then there exists a finite time \(t_1^c={1}/{(s\beta _1\widetilde{y}_1^*)}\ln {y_1^0}/{(y_1^0-\widetilde{{y}}^*_1)}>0\) such that \(y_1\) is unbounded as t approaches \(t_1^c\).
If \(y_1^0<\widetilde{y}_1^*\), then \(y_1\rightarrow 0\) as \(t\rightarrow \infty \). Thus, the limiting system of (15) is
Define
Thus, the first equation of (16) can be rewritten as
which, together with the initial condition \(y_2^0\), yields
If \(y_2^0>y_2^c\), then there exists a finite time \(t_2^c={1}/{(s\beta _2y_2^c)}\ln {{y}_2^0}/{(y_2^0-{y}^c_2)}>0\) such that \(y_2\) bursts at \(t=t_2^c\). If \(y_2^0<y_2^c\), then \(y_2\rightarrow 0\) as \(t\rightarrow \infty \). Thus, the limiting system of (16) is
Obviously, \(y_3\rightarrow 0\) as \(t\rightarrow \infty \). Thus, one has
which contradicts to \(Q(t)\equiv 0\). If \(y_2^0=y_2^c\), then system (16) can be rewritten as
If \(y_3^0\ne 0\), then \(y_3\rightarrow \infty \) as \(t\rightarrow \infty \). If \(y_3^0=0\), then it follows from (18) that \(y_3\equiv 0\). Thus, one has
which contradicts to \(Q(t)\equiv 0\).
Summarizing the above discussions, we have \(y_1^0=\widetilde{y}_1^*\), then \(y_1\equiv \widetilde{y}_1^*\). Furthermore, we get a subsystem of (15) as
Similar to the discussions on (16)–(18), one has \(y_2=\widetilde{y}_2^*\). Then we have \(y_3= \widetilde{y}_3^*\) from the relation of (14). That is, \(\widetilde{L}_0=\{\widetilde{E}^*\}\). Thus, \(M=\{\widetilde{E}^*\}\) is the largest positively invariant subset of \(\{(x,y_1,y_2,y_3): \widetilde{V}'=0\}\). By Lyapunov–LaSalle theorem, solutions of system (3) with positive initial conditions will approach to \(\widetilde{E}^*\), thus, \(\widetilde{E}^*\) is globally asymptotically stable when it exists. This finishes the proof of Theorem 11. \(\square \)
Example 1
Fixing the parameter values of system (3), we can verify that solutions of system (3) ultimately tend towards a global steady state (see Fig. 5).

Plots of the infected hosts \(y_1\), \(y_2\) and \(y_3\) for system (3). It shows that there exists a unique coexistence equilibrium. a Implies that time plots of the infected hosts \(y_1\), \(y_2\) and \(y_3\) tend towards a steady state. b The phase portrait of three parasite strains. Here, \(k=10, u=0.5, v_1=0.2, v_2=0.6, v_3=0.9, \beta _1=0.1, \beta _2=0.12, \beta _3=0.13\) and \(s=0.4\)
4 Dynamical Behaviors of System (1)
In this section, based on the analysis of Sects. 2 and 3, we investigate the global dynamical behaviors of system (1) and concern on the parasite-free and coexistence of n parasite strains equilibria.
Similar to system (2), we can define the basic reproduction number of system (1), denoted by \(R_{0n}\), which can be written as
where \(R_i={\beta _ik}/{(u+v_i)u}\) represents the basic reproduction number of parasite strain i. It is easy to check that system (1) always exists a parasite-free equilibrium \(E_0^{n}(x_{0n},0,\ldots ,0)\), where \(x_{0n}={k}/{u}\), and admits a unique coexistence equilibrium \(E_0^n\) under suitable conditions.
The global stability of \(E_0^{n}\) can be verified via the following theorem.
Theorem 12
The parasite-free equilibrium\(E_0^{n}\)of system (1) is globally asymptotically stable when\(R_{0n}<1\).
In fact, we can consider a Lyapunov function
and show the global stability of \(E_0^n\) via the Lyapunov–LaSalle theorem. Here, we omit the proof for brevity.
Let us investigate the existence of coexistence equilibrium (positive equilibrium) for system (1), denoted by \(E_n^*(x^*,y_1^*,\ldots ,y_n^*)\). Setting the right hands of all equations for system (1) be zero and summing them, one gets
Here, \(y^*=\sum _{j=1}^{n}y^*_j\). That is
Then, the second equation of system (1) can be rewritten as
which has the following form
where
Thus, we have a specific positive solution of system (1)
if \(f_i>0\). Note that the value of each \(y^*_i\) depends on \(x^*\), \(y^*\) and \(y_j^*\ (j>i)\). According to a recursive ‘top-down’ way, we get each \(y_i^*\) in terms of \(x^*\) and \(y^*\), and then substitute each \(y^*_i\) into (20), and finally get the first relation of \(x^*\) and \(y^*\). If the other relation of \(x^*\) and \(y^*\) can be derived, then there is possible to obtain such a specific positive equilibrium of system (1). It should be noticed that this method is somewhat similar to that in Nowak and May (1994), but vary in the condition for the existence of positive equilibrium. To be specific, the existence of positive equilibrium depends on the another relation of \(x^*\) and \(y^*\), rather than directly assuming that \(y^*\) is known.
The unique coexistence equilibrium \(E^*\) for system (2) and \(\widetilde{E}^*\) for system (3) can be solved via (20)–(22). For the proof of existence of \(E^*\) and \(\widetilde{E}^*\), one can see Appendices D and E. Note that the other relation of \(x^*\) and \(y^*\) can be obtained, i.e., (25) in Appendix D and (29) in Appendix E. Hence, the existence of \(E^*_n\) depends on not only \(f_i>0\) defined in (21), but also the other relation of \(x^*\) and \(y^*\).
Now, we analyze the global stability of \(E_n^*\) of system (1). Since \(E_n^*\) is the solution of system (1) and then satisfies the following equations
Consider a Lyapunov function
Its derivative along the solutions of system (1) gets
Moreover, \(V'_{n}=0\) holds if and only if \(x=x^*\). We set
We would like to show the largest positively invariant subset of \(L_n\). According to the analysis of Theorems 9 and 11, if we can show that \(\{E_n^*\}\) is the largest positively invariant subset of \(L_n\), then the global stability of \({E}_n^*\) can be determined, however, it is not as easy as those for system (2) and system (3).
Combining the above discussions, we guess that
Conjecture 1
The coexistence equilibrium\(E_n^*\) of system (1) is globally asymptotically stable whenever it exists.
Now, we give two numerical examples to testify Conjecture 1. Concerning system (1) with \(n=4\) and \(n=5\), respectively, we fix the parameter values of two systems. Numerical results show that solutions of two systems ultimately tend towards a global steady state (see Fig. 6).

Plots of the infected hosts for system (1) with \(n=4\) and \(n=5\). a The case for system (1) with \(n=4\). Here, \(k=10, u=0.5, v_1=0.1, v_2=0.27, v_3=0.54, v_4=0.8, \beta _1=0.11, \beta _2=0.12, \beta _3=0.13, \beta _4=0.14\) and \(s=0.4\); b The case for system (1) with \(n=5\). Here, \(v_5=1.1, \beta _5=0.17\) and the other parameters are the same with (a)
5 Discussions and Conclusions
In this paper, we analyzed the global stability of system (2) in details, gave some numerical simulations to reveal the important effects of superinfection on the dynamical behaviors of two parasite strains, furthermore, investigated the global stability of system (3) and system (1), and made some comparisons with the results in Nowak and May (1994). Then, the existence and global stability of system (3) were shown and the corresponding numerical simulation was provided. Finally, we explored the general results on the existence and stability for system (1).
The results concerning system (2) show that the basic reproduction number \(R_0\) and the invasion reproduction numbers \(R_1^2, R_2^1\) can be considered as the threshold condition for parasite extinction and the subthreshold condition for coexistence of two parasite strains, respectively. According to Theorems 2–9, all possible equilibria of system (2) are globally asymptotically stable when they are locally asymptotically stable. These results are consistent with those in Nowak and May (1994). Furthermore, we provide the fully mathematical analysis which are not shown in the previous paper. Remarks 2.1–2.2 show that some comparisons between our results and those in Nowak and May (1994) for two parasite strains. We introduce two invasion reproduction numbers which further help us understand the global dynamical behaviors for system (2). Furthermore, numerical simulations reveal the significant effects of superinfection on the coexistence and coexistence region of two parasite strains.
The results concerning on system (3) show that the basic reproduction number \(\widetilde{R}_0\) determines whether the parasite strains can be eradicated or not. It follows from Theorem 11 that the coexistence equilibrium of three parasite strains must be globally asymptotically stable if it exists. This result is distinct from the previous phenomenon observed in Nowak and May (1994). Nowak and May in (1994) points out that for three or more parasite strains, there exists oscillations with increasing amplitude and period and forms a heterocyclic cycle. Furthermore, for small values of s, one observes that system with three parasite strains can exclude chaos. However, in our present paper, when we relax all the strict assumptions on system (3), those complex phenomena such as the heterocyclic cycle and chaos disappear and system ultimately tends towards a global steady state so long as it exists (see Theorem 11). Figure 4 exactly reflects this fact. For example, we see that the complex dynamics, like cycles, could come from the fact that Nowak and May make assumption (i) in order to reduce the dimensionality of the system which then gives a Lotka–Volterra system of equations, and these are known to give limit cycles (and chaos in higher dimensions). A more thorough analysis of why these two systems exhibit different dynamic behaviours would be our future work.
References
Alizon S (2013) Co-infection and super-infection models in evolutionary. Interface Focus 3(6):20130,031
Antia R, Levin BR, May RM (1994) Within-host population dynamics and the evolution and maintenance of microparasite virulence. Am Nat 144(3):457–472
Boldin B, Diekmann O (2008) Superinfections can induce evolutionarily stable coexistence of pathogens. J Math Biol 56(5):635–672
Bremermann HJ, Thieme H (1989) A competitive exclusion principle for pathogen virulence. J Math Biol 27(2):179–190
Bull J (1994) Perspective: virulence. Evolution 48(5):1423–1437
Choisy M, de Roode JC (2010) Mixed infections and the evolution of virulence: effects of resource competition, parasite plasticity, and impaired host immunity. Am Nat 175(5):E105–E118
Denysiuk R, Silva CJ, Torres DFM (2017) Multiobjective optimization to a TB–HIV/AIDS coinfection optimal control problem. Comp Appl Math 3:1–17
Diekmann O, Heesterbeek J, Metz JA (1990) On the definition and the computation of the basic reproduction ratio \({R_0}\) in models for infectious diseases in heterogeneous populations. J Math Biol 28(4):365–382
van den Driessche P, Watmough J (2002) Reproduction numbers and sub-threshold endemic equilibria for compartmental models of disease transmission. Math Biosci 180(1):29–48
Frank SA (1992) A kin selection model for the evolution of virulence. Proc R Soc Lond B 250(1329):195–197
Futuyma DJ (2013) The evolution of evolutionary ecology. Isr J Ecol Evol 59(4):172–180
Hood M (2003) Dynamics of multiple infection and within-host competition by the anther-smut pathogen. Am Nat 162(1):122–133
Huijben S, Nelson WA, Wargo AR, Sim DG, Drew DR, Read AF (2010) Chemotherapy, within-host ecology and the fitness of drug-resistant malaria parasites. Evolution 64(10):2952–2968
Iannelli M, Martcheva M, Li X (2005) Strain replacement in an epidemic model with super-infection and perfect vaccination. Math Biosci 195(1):23–46
Li MY, Wang L (1998) A criterion for stability of matrices. J Math Anal Appl 225(1):249–264
Li MY, Graef JR, Wang L, Karsai J (1999) Global dynamics of a SEIR model with varying total population size. Math Biosci 160(2):191–213
Liu X, Chen X, Takeuchi Y (2011) Dynamics of an SIQS epidemic model with transport-related infection and exit-entry screenings. J Theor Biol 285(1):25–35
Martcheva M, Thieme HR (2003) Progression age enhanced backward bifurcation in an epidemic model with super-infection. J Math Biol 46(5):385–424
May RM, Anderson RM (1990) Parasite–host coevolution. Parasitology 100(S1):S89–S101
Mosquera J, Adler FR (1998) Evolution of virulence: a unified framework for coinfection and superinfection. J Theor Biol 195(3):293–313
Nowak MA, May RM (1994) Superinfection and the evolution of parasite virulence. Proc R Soc Lond B 255(1342):81–89
Pugliese A (2002) On the evolutionary coexistence of parasite strains. Math Biosci 177:355–375
Read AF, Taylor LH (2001) The ecology of genetically diverse infections. Science 292(5519):1099–1102
Stunzenas V (2001) Parasite–host interaction: a new point of view on immune regulation. Acta Zool Lituanica 11(4):405–416
Xu D, Sandland GJ, Minchella DJ, Feng Z (2012) Interactions among virulence, coinfection and drug resistance in a complex life-cycle parasite. J Theor Biol 304:197–210
Zhang P, Sandland GJ, Feng Z, Xu D, Minchella DJ (2007) Evolutionary implications for interactions between multiple strains of host and parasite. J Theor Biol 248(2):225–240
Acknowledgements
We are grateful to the editors and the anonymous referees for their careful reading and helpful comments which led to an improvement of our manuscript. L. Liu is supported by the National Natural Science Foundation of China (11601239) and Scientific and Technologial Innovation Programs of Higher Education Institutions in Shanxi (ISTP). X. Liu is supported by the National Natural Science Foundation of China (11671327). X. Ren is supported by the National Natural Science Foundation of China (11901477).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendices
Appendix A: Equivalency of Inequality (7)
Proof
Firstly, we show that \(R_1^2>1\) implies that \(x^*>0\). Note that \(R_1^2>1\) can be rewritten as \(\left[\frac{R_1}{R_2}>1+\frac{su(R_2-1)}{u+v_1}\right]\), which yields that \(\left[R_1-R_2>\frac{su(R_2-1)}{u+v_1}\cdot \frac{\beta_2 k}{u(u+v_2)}\right]\). Thus, we have \(\left[\frac{u}{k}(u+v_1)(u+v_2)(R_1-R_2)+us{\beta_2}>su{\beta_2} R_2>0\right]\), which can guarantee that \(x^*>0\).
Next, we show the conclusion holds under the condition \(x^*>0\). We now show that \(x^*>{(u+v_1)}/{\beta _1}\) is equivalent to the inequality \(R_2^1>1\). It follows from \(x^*>{(u+v_1)}/{\beta _1}\) that we have
which can be rewritten as
That is,
Thus, one has
Therefore, we have
Similarly, \(x^*<{(u+v_2)}/{\beta _2}\) is equivalent to \(R_1^2>1\). \(\square \)
Appendix B: Proof of Theorem 2
Proof
The Jacobian matrix at \(E_0\) for the right hand side of system (2) is given by
It is easy to see that the eigenvalues of \(J(E_0)\) are \(\lambda _1=-u,\lambda _2=(u+v_1)(R_1-1),\lambda _3=(u+v_2)(R_2-1)\). Noting that \(R_0<1\), we can conclude that all eigenvalues of \(J(E_0)\) are negative. When \(R_0>1\), \(J(E_0)\) has at least one positive eigenvalue. Hence, the parasite-free equilibrium \(E_0\) is locally asymptotically stable if \(R_0<1\) and is unstable if \(R_0>1\). This completes the proof. \(\square \)
Appendix C: Proof of Theorem 3
Proof
The Jacobian matrix at \(\bar{E}_1\) for the right hand side of system (2) is given by
and its second additive compound matrix is
Then, one has
hold if \(R_2^1<1\). Thus, it follows from Lemma 2.1 that \(J(\bar{E}_1)\) is stable when \(R_2^1<1\). When \(R_2^1>1\), \(J(\bar{E}_1)\) has at least one positive eigenvalue. Thus, \(\bar{E}_1\) is locally asymptotically stable if \(R_2^1<1\) and it is unstable if \(R_2^1>1\). This finishes the proof of Theorem 3. \(\square \)
Appendix D: Proof of Existence of \({E}^*\)
Proof
By using (22), one has
if \(h_2>0\). Furthermore, we have
if \(h_1>0\). Substituting (23) and (24) into (20) yields the first relation of \(x^*\) and \(y^*\).
It follows from system (2) that we obtain
which is derived according to the subtracting between the second and third equations. Thus, we have the other relation of \(x^*\) and \(y^*\). Combining those two relations, we can solve the positive solution \(E^*\) of system (2) in this specific way.
Appendix E: Proof of Existence of \(\widetilde{E}^*\)
Proof
It follows from (22) that we have
if \(H_3>0\). Furthermore, we have
if \(H_2>0\) and
if \(H_1>0\). Substituting (26)–(28) into (20) yields the first relation of \(\widetilde{x}^*\) and \(\widetilde{y}^*\).
It is easy to derive that
Here, the second equation is derived from the subtracting between the fourth and third equations. Combining the above two equations, we can solve
if \(H_0>0\). Substituting (29) into the first relation of \(\widetilde{x}^*\) and \(\widetilde{y}^*\) yields that
where
Thus, there exists a unique positive \(\widetilde{y}^*\) if and only if \(A\ne 0\), \(AB>0\) and \(H_i>0, i=0,1,2,3,4\). \(\square \)
Rights and permissions
About this article

Cite this article
Liu, L., Ren, X. & Liu, X. A Host–Parasite System with Multiple Parasite Strains and Superinfection Revisited: The Global Dynamics. Acta Biotheor 68, 201–225 (2020). https://doi.org/10.1007/s10441-019-09359-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10441-019-09359-7