
Abstract
This paper presents numerical results pertaining to the effects of interface curvature on the effective slip behavior of Poiseuille flow through microchannels and microtubes containing superhydrophobic surfaces with transverse ribs and grooves. The effects of interface curvature are systematically investigated for different normalized channel heights or tube diameters, shear-free fractions, and flow Reynolds numbers. The numerical results show that in the low Reynolds number Stokes flow regime, when the channel height or tube diameter (normalized using the groove–rib spacing) is sufficiently large, the critical interface protrusion angle at which the effective slip length becomes zero is θ c ≈ 62°–65°, which is independent of the shear-free fraction, flow geometry (channel and tube), and flow driving mechanism. As the normalized channel height or tube diameter is reduced, for a given shear-free fraction, the critical interface protrusion angle θ c decreases. As inertial effects become increasingly dominant corresponding to an increase in Reynolds number, the effective slip length decreases, with the tube flow exhibiting a more pronounced reduction than the channel flow. In addition, for the same corresponding values of shear-free fraction, normalized groove–rib spacing, and interface protrusion angle, longitudinal grooves are found to be consistently superior to transverse grooves in terms of effective slip performance.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Due to the rapid advancement in microfabrication techniques and processes, numerous microfluidic devices for a diverse range of scientific and engineering applications have been successfully developed. Many of these microfluidic devices contain complex networks of microchannels or microtubes. It is well known that the pressure gradient required for maintaining a fixed volumetric flow rate through a device scales inversely as the fourth power of the characteristic cross-sectional length scale (Lauga and Stone 2003; Davis and Lauga 2009). The pressure drop requirements for maintaining a specified flow rate thus increase appreciably corresponding to a reduction in the cross-sectional dimensions of the microdevices. It is therefore imperative to devise novel techniques for alleviating the excessive pressure drop requirements. One particularly promising technology that has proven to be effective is the use of superhydrophobic surfaces. Such surfaces consist of regular arrangements of microsize features, such as ridges or posts, patterned on a solid substrate, which is subsequently coated with a thin layer of hydrophobic material. The hydrophobicity of the surface prevents the flowing liquid from fully penetrating the cavities in between the microprotrusions. A Cassie state is thus maintained, and pockets of air or vapor become trapped in the cavities, which reduce the effective contact area between the flowing liquid and the solid wall. This results in a concomitant reduction in flow resistance and thus pressure drop requirements.
A considerable amount of theoretical (Philip 1972a, b; Lauga and Stone 2003; Maynes et al. 2007; Sbragaglia and Prosperetti 2007; Teo and Khoo 2009; Ng et al. 2010; Ng and Wang 2011) and numerical studies (Cheng et al. 2009; Martell et al. 2009; Maynes et al. 2007; Priezjev et al. 2005) has previously been carried out to investigate the use of superhydrophobic surfaces for reducing the flow resistance through microchannels and microtubes. Many researchers have assumed undeformed or flat liquid–gas interfaces with shear-free boundary conditions along the liquid–gas interfaces. Philip (1972a, b) and Lauga and Stone (2003) obtained analytical solutions for Stokes flow through superhydrophobic circular tubes patterned with grooves and ribs oriented longitudinally and transversely to the flow direction. Teo and Khoo (2009) systematically investigated Stokes flow through microchannels containing superhydrophobic grooves oriented longitudinally, transversely and at an angle to the applied pressure gradient. Davies et al. (2006) numerically quantified the effective slip behavior of superhydrophobic surfaces containing transverse grooves for a wide range of Reynolds numbers in the laminar flow regime. Experimental studies (Byun et al. 2008; Ou et al. 2004; Ou and Rothstein 2005; Tsai et al. 2009; Watanabe et al. 1999) have also been performed to investigate the application of superhydrophobic surfaces for reducing flow resistance. It will be useful to provide some typical geometric dimensions of the superhydrophobic surfaces employed in these studies. For example, in the work of Ou and Rothstein (2005), microchannels with heights ranging between 76 and 254 µm were employed. The superhydrophobic grooves employed had widths ranging between 20 and 120 µm and were separated by ridges with widths of 20–30 µm. Pressure drop reductions of up to 40 % and effective slip lengths of 20 µm have been reported. The reduction in flow resistance is typically quantified by the effective slip length, which is defined as the imaginary distance below the surface at which the fluid velocity extrapolates to zero. Slip velocities of up to 20 µm/s were measured, which corresponded to 50 % of the average velocity in the microchannel.
Ou et al. (2004) and Ou and Rothstein (2005) measured the pressure drop requirements for the flow of water through a series of microchannels containing superhydrophobic surfaces with well-defined microsized surface roughness elements. Their experimental data agree qualitatively with the analytical predictions of Philip (1972a, b), Lauga and Stone (2003) and Teo and Khoo (2009), thus alluding to the validity of the “flat” liquid–gas interface assumption.
In majority of the previous works performed within the laminar flow regime, researchers have reported a reduction in flow resistance or equivalently, a positive effective slip length, associated with the use of superhydrophobic surfaces. On the contrary, an increase in flow resistance (or negative values of effective slip length) has recently been documented in several experimental (Steinberger et al. 2007), analytical (Davis and Lauga 2009; Ng and Wang 2009, 2011) and computational studies (Steinberger et al. 2007; Hyvaluoma and Harting 2008), involving shear-driven laminar flows. In particular, Davis and Lauga (2009) presented an analytical model for superhydrophobic surfaces containing grooves oriented transversely to the flow direction. The enhancement in flow resistance was attributed to the liquid–gas interface or meniscus (in the shear-free regions) protruding excessively into the liquid phase. Based on the methods of eigenfunction expansion and point collocation, Ng and Wang (2011) have analytically obtained negative values of effective slip length arising from the convex liquid–gas interface for Stokes flow over superhydrophobic surfaces containing 2-D cylindrical or 3-D spherical protrusions. The above findings highlight the importance of correctly accounting for interface protrusion and curvature on the effective slip length and thus flow resistance mitigation capability of superhydrophobic surfaces.
The effects of interface curvature on the flow past superhydrophobic surfaces containing longitudinal grooves have previously been investigated analytically and numerically by Crowdy (2010, 2011a, b), Teo and Khoo (2010) and Wang et al. (2013). Several experimental studies (Byun et al. 2008; Ou et al. 2004; Ou and Rothstein 2005; Tsai et al. 2009) have also documented the presence of interface curvature effects. For instance, Tsai et al. (2009) reported that the air–water interface protruded away from the liquid phase by a distance equivalent to a quarter of the groove width. Apart from methods based on continuum hydrodynamics, particle-based molecular dynamics (MD) or dissipative particle dynamics (DPD) simulations have also been employed to explore the effects of surface heterogeneity on the slip behavior of microflows. For liquid flow over roughness elements in a superhydrophobic state, Cottin-Bizonne et al. (2004) found good agreement between results obtained using MD simulations and continuum hydrodynamics for low pressure differences across the liquid–gas interface. However, for large pressure differences across the interface, it was cautioned that the exact shape of the interface had to be considered.
The objective of this work is to numerically quantify the effects of interface curvature on the effective slip behavior of laminar Poiseuille flow through microchannels containing a periodic alternating array of grooves and ridges arranged transversely to the flow direction. Previous works pertaining to transverse grooves have focused exclusively on unbounded or wall-driven shear flows (Couette flows) (Hyvaluoma and Harting 2008; Steinberger et al. 2007; Davis and Lauga 2009; Ng and Wang 2011). For the case of longitudinal grooves, Teo and Khoo (2010) have demonstrated that for finite ratios of channel height to groove–rib period, interface curvature has a more dominant effect on Poiseuille flows than Couette flows. Results will first be presented for sufficiently large normalized channel heights in the dilute or small shear-free fraction limit for low Reynolds numbers, where analytical results are available for comparison. Subsequently, the infinitesimal shear-free fraction assumption is relaxed, and the effects of finite shear-free fractions are investigated, drawing comparison with the results available for shear-driven flows. Next, the normalized channel height is reduced to investigate the effects of channel wall confinement on the effective slip performance. Numerical simulation results for higher Reynolds numbers will be presented to elucidate the effects of fluid inertia. Finally, computational results pertaining to the effects of interface curvature will also be presented for pressure driven Poiseuille flow through microtubes with circular cross-sections containing transverse superhydrophobic grooves. These results serve to complement the analytical solutions previously obtained by Lauga and Stone (2003) who assumed negligible interface protrusion effects.
2 Numerical methodology
The baseline microchannel flow configuration considered in this work is depicted in Fig. 1. The microchannel consists of a periodic array of alternating superhydrophobic grooves and ribs aligned perpendicularly to the streamwise x-direction. The superhydrophobic surfaces are patterned along both walls of the microchannel of height H. The close-up in Fig. 1 depicts one periodic groove–rib combination of the channel flow, where the horizontal dot-dash line represents the line of symmetry and the two vertical double dot-dash lines indicate the periodic extent of each section. The spatial extent of each periodic groove–rib combination is E. Each groove and rib spans a distance of e and (E − e), respectively, in the x-direction. Assuming the number of periodic groove–rib structures to be sufficiently large, it can be assumed that the flow is periodic across each groove–rib combination in the x-direction. The two salient dimensionless geometric parameters are the shear-free fraction δ = e/E and the normalized groove–rib period L = E/(H/2).

Schematic diagram depicting channel flow geometry with superhydrophobic surfaces consisting of alternating grooves and no-slip ribs arranged transversely to the flow direction on both channel walls. The liquid–gas interface is assumed to be shear free and is colored as a blue solid line (color figure online)
A fully-developed, incompressible, steady, laminar and Newtonian flow is assumed. The liquid density, dynamic viscosity and surface tension coefficient are denoted by ρ, µ and σ, respectively. A Cassie or fakir state is also maintained, with the liquid–gas interface or contact line assumed to be pinned at the sharp corners of the ribs. The interface deforms under the influence of a static pressure difference Δp across the interface. The radius of curvature of the interface R is given by the Young–Laplace equation R = σ/Δp. The wetting of the grooves is averted due to surface tension effects. An approximate stability criterion (Quere et al. 2003) for maintaining a dewetted Cassie state is Δp ≤ −2σ cosΦ/(δE), where Φ (>90°) is the liquid–vapor–solid contact angle. As the (δE) product increases, there is a greater likelihood for the stability criterion to be violated for a given value of Δp. According to Gao and Feng (2009) who performed multiphase numerical simulations on the superhydrophobic transverse groove configuration, contact line depinning occurs when the Capillary number (\(Ca = \mu \dot{\gamma }e/\sigma\)) exceeds 0.4, where \(\dot{\gamma }\) denotes the shear rate. For water with µ = 10−3 Pa s, σ = 0.073 N/m and a typical groove width of e = 50 µm, the shear rate should not exceed ~105 s−1 to avoid contact line depinning.
For the numerical simulations, the interface is assumed to have a constant radius of curvature R characterized by a protrusion angle θ, which corresponds to the included angle formed between the tangent line T* of the deformed liquid–gas interface and the channel rib boundary at the pinned corners of ribs. The angle θ is positive when the meniscus bows toward the liquid phase, and is negative when the interface deforms away from the liquid phase. The constant curvature assumption is valid for sufficiently small Capillary and Weber numbers, which physically imply that the viscous shear forces and inertial forces are small, compared to the surface tension forces. The Knudsen number of the liquid is assumed to be sufficiently low, so that rarefied effects can be considered to be negligible, and the liquid can be regarded as a continuum.
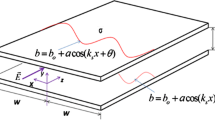
To investigate the effects of flow geometry, the flow through a circular cross-section microtube patterned with superhydrophobic transverse grooves and ribs is also considered in this paper. This configuration has previously been investigated by Philip (1972a, b), and more recently by Lauga and Stone (2003), albeit for a liquid–gas interface in the absence of interface deformation perpendicular to the tube axis. The flow domain considered is depicted in Fig. 2, which shows a series of periodic transverse groove–rib combinations along a tube with radius R. Similar to the microchannel, a close-up view of one periodic extent E is shown, where the two vertical double dot-dash lines represent periodic boundaries and the horizontal dot-dash line represents the axis of symmetry. The axial width of each groove is e, and the dimensionless shear-free fraction and normalized groove–rib periodic spacing are δ = e/E and L = E/R, respectively. The protrusion angle of the deformed interface pinned at the rib corner is still denoted by θ. The other assumptions previously described for the case of the microchannel flow also apply to the circular tube flow.

Schematic diagram depicting the tube flow geometry with superhydrophobic surfaces consisting of alternating grooves and no-slip ribs arranged transversely to the flow direction. The shear-free liquid–gas interface is colored as a blue solid line (color figure online)
For the microchannel flow, the two nonzero components of the velocity vector in the Cartesian x- and y-directions are u and v, respectively. The governing equations are the continuity and momentum equations. The former is written as
The x- and y-components of the momentum equation are, respectively, written as
Furthermore, the imposed boundary conditions are described as follows. Referring to Fig. 1, the flow is symmetric about y = 0:
A stick–slip boundary condition is imposed along the superhydrophobic walls patterned with transverse ribs and grooves. The flow is assumed to satisfy the no-slip condition along the ribs:
The flow is assumed to be shear free along the curved liquid–gas interface extending over the grooves:
where \(\hat{t}\) and \(\hat{n}\) are the local unit tangent and normal vectors to the liquid–gas interface, respectively, and \(\overline{\overline{\tau }}\) corresponds to the stress tensor. Furthermore, the liquid–gas interface corresponds to a streamline, as it is assumed that no flow penetrates through the interface. Hence,
where \(\vec{V}\) corresponds to the velocity vector. In addition, periodic boundary conditions are specified at the upstream and downstream locations of each streamwise periodic computational domain. Corresponding locations at these boundaries are specified to have the same values of velocity and velocity gradient.
In a similar fashion, for axisymmetric flow through a microtube illustrated in Fig. 2, the governing equations are described using cylindrical coordinates and boundary conditions identical to those prescribed for the microchannel are imposed.
The flow Reynolds number is defined as \(Re = \rho \overline{u} D_{\text{H}} /\mu,\) where ρ and µ are, respectively, the liquid density and dynamic viscosity, \(\overline{u}\) denotes the bulk velocity along the streamwise direction and D H corresponds to the hydraulic diameter. For the channel flow, D H = 2H, whereas for the tube flow, D H = 2R. Corresponding to a fixed volumetric flow rate, and thus flow Reynolds number, the Darcy friction factor is given via the required streamwise pressure gradient ΔP/E as
For the classical 2-D Poiseuille flow through a channel with no-slip boundary conditions, the friction factor–Reynolds number product is a constant, i.e., fRe = 96. For the flow through a microchannel containing superhydrophobic surfaces depicted in Fig. 1, the normalized effective slip length and the fRe product are related via (Davies et al. 2006)
Likewise, for the flow through a microtube containing superhydrophobic surfaces shown in Fig. 2, the normalized effective slip length and the fRe product are related via
which is consistent with the result fRe = 64 for the classical Poiseuille flow through a microtube with no-slip boundary conditions. For a fixed Reynolds number, the pressure drop is obtained to deduce the effective slip length, which depends on the liquid–gas interface profile, shear-free fraction and normalized groove–rib spacing.
In view of the nonlinearity of the Navier–Stokes equations, the commercial computational fluid dynamics (CFD) software Fluent (Fluent, Inc., NH, USA) is employed to solve the governing equations using the finite volume method. For the coupling of velocity and pressure, the SIMPLE algorithm is chosen. Discretization of the momentum equations is performed using a second-order upwind scheme. To ascertain the accuracy of the results obtained from the numerical simulations, grid independence studies have to be performed. An adaptive grid refinement scheme has been employed. In order to achieve a well-localized grid refinement on the curved boundary and in its vicinity, the hanging-node scheme is used to subdivide the cells into smaller ones after the 2-D flow domain was meshed with a relatively coarse grid and converged results were obtained using the coarse grid. The residues for continuity, x-momentum and y-momentum were 10−15, 10−10 and 10−12, respectively. The mesh was repeatedly refined until the pressure drop varied <0.5 % between successive grid refinements.
3 Results and discussion
3.1 Numerical validation
In order to ascertain that our numerical solutions are independent of the mesh size and the numerical methods employed, computations are first performed and checked against analytical results available in the literature for low Reynolds number Stokes flow past superhydrophobic transverse grooves. In the asymptotic limit when the channel height H or tube radius R becomes infinitely large as compared to the groove–rib periodic spacing E, i.e., L → 0, it has been shown that in the absence of interface curvature (θ = 0°), the normalized effective slip length is given by (Philip 1972a, b; Lauga and Stone 2003; Teo and Khoo 2009)
Numerical results for the normalized effective slip length are shown in Fig. 3 for the channel and tube flows corresponding to L = E/(H/2) = E/R = 0.125 and shear-free fractions δ = 0.25, 0.5 and 0.75. The Reynolds number for the channel and tube flows has been fixed at 0.1, which is in the Stokes flow regime. As can be observed from Fig. 3, there is favorable agreement between the numerical results and the analytical expression given by Eq. (11), thus indicating the accuracy of the computational schemes.

3.2 Channel flow results for small values of L, δ and Re
Davis and Lauga (2009) have previously proposed an analytical model for the dependence of the normalized effective slip length on the interface protrusion angle θ corresponding to Stokes shear flow past superhydrophobic transverse grooves with small values of δ and L. They did not specify the upper bound of δ for which their model is accurate, most probably due to the dearth of numerical solutions or reliable experimental results for the curved interface configurations. However, their analytical model should also be valid for the flat interface case (θ = 0°), provided δ and L are sufficiently small. Their analytical solution is compared against the exact analytical solution (11) in Fig. 3 for θ = 0°. Although their analytical model is strictly valid for \(\delta \ll 1\), Fig. 3 shows that for a flat interface, the difference between the exact analytical solution and their analytical model does not exceed 10 % for δ < 0.47. For a curved interface (θ ≠ 0°), no such comparison is available, although they have assumed the validity of their analytical model up to δ = 0.68 in their work.
To further assess the validity of our numerical results, shown in Fig. 4 are the numerical results for the normalized effective slip length for various interface protrusion angles θ corresponding to Poiseuille flow through a microchannel containing superhydrophobic transverse grooves. The normalized groove–rib periodic spacing L = E/(H/2) was 0.125, and the shear-free fraction δ was 0.25 (solid blue squares). The Reynolds number Re of the flow was fixed at 0.1 corresponding to the Stokes flow regime where inertial effects are small compared to viscous effects. Also, plotted on Fig. 4 are the analytical results of Davis and Lauga (2009). It is evident that there is reasonably good agreement between the analytical and numerical results for low Re flow. Slight discrepancies may arise due to the nonzero values of δ, L and Re used in the numerical simulations. In particular, the numerical results are capable of predicting the critical interface protrusion angle θ c of approximately 62° when the effective slip length approaches zero and becomes negative for θ > θ c. According to the analytical model of Davis and Lauga (2009), for asymptotically small values of δ, L and Re, the normalized effective slip length λ/(δe) is only a function of θ. Furthermore, θ c remains constant and is independent of δ, L and Re. In the subsequent sections, the small δ, L and Re assumptions will be gradually relaxed.

Comparison of analytical solutions of Davis and Lauga (2009) (blue solid line) and Ng and Wang (2011) (red dashed line), analytical solution (11) (black hollow stars) and numerical results for the effects of interface protrusion angle θ on the normalized effective slip length for Poiseuille channel flow corresponding to δ = 0.25 and 0.50 at L = 0.125 and Re = 0.1 (color figure online)
3.3 Effects of shear-free fraction δ for small values of L and Re
Using semi-analytical methods, Ng and Wang (2011) quantified the effective slip length for simple shear flow arising from a far field unity velocity gradient applied over a surface patterned with periodic 2-D or 3-D protrusions. Their results show excellent agreement with the results of Davis and Lauga (2009), which are valid for the small shear-free fraction limit. Ng and Wang (2011) also demonstrated that the critical interface protrusion angle was approximately 65° and was independent of shear-free fraction. Furthermore, phenomenological equations have been derived for the interface protrusion angles yielding the maximum effective slip length for several surface configurations. In this section, we investigate the effects of shear-free fraction δ on the normalized effective slip length corresponding to Poiseuille flow through a microchannel patterned with superhydrophobic transverse grooves. Detailed comparisons will be made with the effective slip length obtained by Ng and Wang (2011) for a simple shear flow at a moderate shear-free fraction δ of 0.5 and a large interface protrusion angle θ of 90°.
For Poiseuille flow through microchannels containing superhydrophobic transverse grooves, the normalized groove–rib periodic spacing L = E/(H/2) has been held constant at a relatively small value of 0.125, and a flow Reynolds number Re of 0.1 has been maintained. Figure 4 also presents the normalized effective slip length as a function of interface protrusion angle θ at the moderate shear-free fraction δ of 0.5 (red solid triangles) in the Stokes flow regime. From Fig. 4, it is evident that our numerical predictions of effective slip length are in good agreement with the semi-analytical results of Ng and Wang (2011) for small L and Reynolds numbers at moderate shear-free fractions. The normalized effective slip length is numerically predicted to reach a maximum at θ ≈ 10°, which is also consistent with the results of Ng and Wang (2011). Moreover, for an interface protrusion angle θ of 90°, Ng and Wang (2011) have derived a phenomenological equation for the normalized effective slip length as a function of shear-free fraction:
For Poiseuille flow through microchannels containing superhydrophobic transverse grooves with L = 0.125, Re = 0.1 and interface protrusion angle θ = 90°, the normalized effective slip length is numerically quantified for shear-free fractions δ = 0.25, 0.5 and 0.75. Figure 5 compares the effective slip length values calculated using Eq. (12) with the numerical results obtained in this work. There is good agreement between both sets of results, thus providing further confidence to the validity of our computational approach. Minor discrepancies might result from the finite value of L used in the numerical predictions.

Comparison of semi-analytical solution of Ng and Wang (2011) (blue solid line) in Eq. (12) with numerical results (red squares) for the effects of shear-free fraction δ on the normalized effective slip length for Poiseuille channel flow corresponding to θ = 90°, L = 0.125 and Re = 0.1 (color figure online)
In addition, for Poiseuille flow through microchannels containing superhydrophobic transverse grooves with L = 0.125 and Re = 0.1, numerical results for the normalized effective slip length λ/(δe) are plotted against the interface protrusion angle θ in Fig. 6a for various shear-free fractions δ ranging between 0.25 and 0.75. It is evident that λ/(δe) depends on both θ and δ at sufficiently small values of L for Poiseuille flow. One remarkable observation is that the critical interface protrusion angle θ c remains at approximately 62°–65° as δ varies, which is consistent with the results of Ng and Wang (2011) for simple shear flow. At this junction, we may conclude that the critical interface protrusion angle θ c approaches 62°–65°, which is independent of the shear-free fraction and flow driving mechanism for infinitesimal L in the low Reynolds number Stokes flow regime. At all other values of θ, λ/λ(δe).(δe) exhibits an increasing trend corresponding to an increase in the value of δ.

a The normalized effective slip length for various shear-free fractions δ corresponding to superhydrophobic transverse groove configuration with L = 0.125 at Re = 0.1. b The normalized effective slip length for various shear-free fractions δ corresponding to superhydrophobic longitudinal groove configuration with L = 0.04 (Wang et al. 2013). The analytical results of Crowdy (2010) in the limit as δ → 0 are also shown (dash line). c Ratio of normalized effective slip length corresponding to longitudinal versus transverse groove configuration at Re = 0.1 for various δ and interface protrusion angles θ. Analytical results obtained by combining the results of Crowdy (2010) and Davis and Lauga (2009) are also shown (empty squares)
Figure 6b presents the results for λ/(δe) obtained for superhydrophobic longitudinal grooves corresponding to L = 0.04 for various values of θ and δ. These results have been reproduced from the previous work of Wang et al. (2013), where the effective slip lengths have been evaluated using a finite element solver. In contrast to transverse grooves, a critical interface protrusion angle does not exist for longitudinal grooves with small values of L, and λ/(δe) shows a monotonic increase with θ for all values of δ. For a flat liquid–gas interface, various researchers (Lauga and Stone 2003; Philip 1972a, b; Teo and Khoo 2009) have shown that as L → 0, the ratio of the effective slip lengths \(\lambda^{||} /\lambda^{ \bot } = 2\), where the superscripts “||” and “\(\bot\)” denote the longitudinal and transverse groove configurations, respectively. The values of \(\lambda^{||} /\lambda^{ \bot }\) corresponding to L → 0 are shown in Fig. 6c for various values of θ and δ, which manifest that \(\lambda^{||} /\lambda^{ \bot }\) deviates from 2 for θ ≠ 0°, becomes unbounded at θ = θ c and becomes negative for θ > θ c. It can thus be deduced that for small values of L, longitudinal grooves exhibit superior effective slip performance than transverse grooves when both θ and δ are kept constant. As explained by Hyvaluoma and Harting (2008), for longitudinal grooves, the streamlines are straight and parallel, and the flow does not perceive any roughness. However, for transverse grooves, the protruding transverse bubble mattresses serve as roughness elements which enhance the flow resistance as the liquid experiences spatially periodic accelerations and decelerations when it flows past the transverse grooves.
Also, plotted on Fig. 6b are the analytical results derived by Crowdy (2010) for L → 0 in the dilute shear-free fraction limit as δ → 0. Similarly, analytical results for \(\lambda^{||} /\lambda^{ \bot }\) in the limit as L → 0 and δ → 0 are shown on Fig. 6c, where λ || and \(\lambda^{ \bot }\) have been obtained from Crowdy (2010) and Davis and Lauga (2009), respectively. As anticipated, the analytical results compare favorably to the computational results obtained for L = 0.125 and δ = 0.25.
3.4 Effects of δ and L for small values of Re
In this section, we further relax the assumption of small L made in the previous sections to elucidate the effects of both L and δ on the effective slip length for the flow through microchannels containing superhydrophobic transverse grooves. The Reynolds number Re is still kept constant at 0.1 in the Stokes flow regime. It is worth noting that an increase in L = E/(H/2) may be interpreted as enhanced channel wall confinement or interference effects arising from a decrease in channel height H for the same groove–rib periodic spacing E.
Figure 7a presents the normalized effective slip length corresponding to a shear-free fraction δ of 0.25 for various values of L ranging between 0.125 and 4. It is interesting to note that as L increases, the critical interface protrusion angle θ c no longer remains constant at approximately 62°–65°, but exhibits a decreasing trend corresponding to an increase in L. In other words, enhanced channel wall confinement effects culminate in a decrease in θ c for the same shear-free fraction δ. For L = 4 and δ = 0.25, the critical interface protrusion angle θ c has decreased to approximately 56°. For large negative values of θ, enhanced channel wall interference effects corresponding to an increase in L yield larger normalized effective slip lengths λ/(δe) for the same value of θ. However, this trend reverses for large positive values of θ, where larger values of L culminate in deterioration in effective slip performance. This could be explained from the observation that for large values of L, a significant reduction in flow cross-sectional area arises for large positive values of θ, thus resulting in enhanced flow blockage effects which reduces the bulk flow for the same applied streamwise pressure gradient. The opposite trend occurs for large negative values of θ, where the effective flow cross-sectional area is increased remarkably, thus reducing the effective flow resistance.

Effects of interface protrusion angle on normalized effective slip length for various values of L corresponding to a shear-free fraction δ of 0.25. a Transverse groove configuration. b Longitudinal groove configuration (Wang et al. 2013)
Figures 8a and 9a illustrate the dependence of the effective slip length on L for various values of θ corresponding to shear-free fractions δ of 0.5 and 0.75, respectively. Similar salient trends can be observed at these two larger shear-free fractions. For large values of L at the same shear-free fraction, θ c no longer remains constant, but displays a continuously decreasing trend as L increases. However, for the same value of L, θ c decreases more rapidly for cases with larger shear-free fractions. For example, corresponding to L = 4, θ c decreases from approximately 50° for δ = 0.5 to approximately 43° for δ = 0.75. This is in stark contrast to the results shown in Fig. 6a for L = 0.125, where θ c apparently remains invariant at 62°–65° as δ is varied from 0.25 to 0.75.

Effects of interface protrusion angle on normalized effective slip length for various values of L corresponding to a shear-free fraction δ of 0.5. a Transverse groove configuration. b Longitudinal groove configuration (Wang et al. 2013)

Effects of interface protrusion angle on normalized effective slip length for various values of L corresponding to a shear-free fraction δ of 0.75. a Transverse groove configuration. b Longitudinal groove configuration (Wang et al. 2013)
For the same shear-free fraction δ, microchannels with larger values of L yield enhanced effective slip performance for large negative values of θ and inferior effective slip behavior for large positive θ values. This may again be explained by the fact that when δ is held constant, larger values of L (signifying decreasing channel height H for the same groove–rib period E) result in larger fractional changes in the flow cross-sectional area (relative to the flat interface case). For positive values of θ, the interface protrudes by a distance (normalized using H/2) of 0.5Lδ (1/sinθ − 1/tanθ) into the channel. For δ = 0.75 and L = 4, θ c ≈ 43°, thus implying that the interface protrudes substantially into the channel by a normalized distance of 0.59. Furthermore, for the same value of δ, corresponding to a reduction in L, the maximum magnitude for the normalized effective slip length λ/(δe) increases and occurs at higher values of θ.
In order to obtain an intuitive visualization of the flow field associated with the shear-free liquid–gas interface corresponding to various interface protrusion angles θ, the normalized streamwise velocity magnitude and wall shear stress distributions along the channel wall (ribs) and the shear-free interface are shown in Fig. 10a, b, respectively, for three interface protrusion angles θ of 0°, 45° and 75° corresponding to a shear-free fraction δ of 0.5, large L of 4 and Re of 0.1. The streamwise coordinate has been normalized by the groove–rib periodic spacing E, the streamwise velocity magnitude has been normalized by the streamwise bulk velocity \(\overline{u}\), and the wall shear stress has been normalized using \(\mu \bar{u}/E\). From Fig. 10a, b, it is evident that the distributions of the normalized streamwise velocity and wall shear stress, especially in the vicinity of the groove–rib junction, are strongly dependent on the interface protrusion angle θ. Corresponding to an increase in θ, there is an increase in the magnitude of the streamwise velocity along the interface near the center of the groove, presumably due to the enhanced flow blockage effects arising from larger values of θ. Referring to Fig. 10b, there is a general decrease in normalized wall shear stress corresponding to an increase in θ, especially near the groove–rib junction. This signifies that the wall shear stress contribution to the overall flow resistance decreases as θ increases. This seems counter-intuitive, as the effective slip length is positive when θ = 0°, but becomes negative when θ = 75°. However, this is reconciled when the effects of flow resistance arising from the static pressure difference across the curved interface are taken into account. The static pressure distributions (normalized using \(\mu \bar{u}/E\)) along the shear-free interface are plotted in Fig. 10c for θ values of 45° and 75°. It is noted that the overall static pressure along the forward half of the interface is higher than that along the aft portion of the interface. For a curved interface protruding into the liquid, the horizontal component of the force arising from this pressure difference also contributes to the overall flow resistance (Fig. 10c does not include results for the θ = 0° case, as the static pressure variation along the flat interface does not contribute to the overall flow resistance). When θ = 45°, the flow resistance arising from pressure differences between the front and rear halves of the interface constitutes 24 % of the overall flow resistance (the remaining 76 % is due to wall shear stress). When θ is further increased to 75o, the flow resistance arising from interface pressure differences increases significantly to 79 % of the total flow resistance. As θ increases from 0o to 75o, the component of the flow resistance due to pressure differences increasingly dominates the component due to wall shear stress. The magnitude of the flow resistance due to pressure differences ahead and behind the interface increases precipitously with increasing θ, thus culminating in negative values of effective slip length for θ > θ c. This observation substantiates the explanation previously put forth by Hyvaluoma and Harting (2008) that the over-protruding transverse bubble mattresses act like roughness elements which enhance the flow resistance, in contrast to the decrease in flow resistance arising from longitudinal grooves.

a The normalized streamwise velocity magnitude along the shear-free interface. b The normalized wall shear stress along the transverse ribs. c The normalized pressure distribution along the shear-free interface for interface protrusion angles θ = 0°, 45° and 75° with shear-free fraction δ = 0.5, L = 4 and Re = 0.1
For the purpose of comparison, Figs. 7b, 8b and 9b display the influence of interface protrusion on the effective slip length for channel flow corresponding to superhydrophobic longitudinal grooves with shear-free fractions δ of 0.25, 0.5 and 0.75, respectively (Wang et al. 2013). From Figs. 7, 8 and 9, it can be observed that the influence due to interface curvature is qualitatively and quantitatively different for longitudinal and transverse superhydrophobic grooves. For longitudinal grooves, keeping the shear-free fraction δ fixed, the effective slip length generally increases with increasing θ for small values of L, but decreases with increasing θ for large values of L. As discussed at length in Teo and Khoo (2010), in the presence of interface curvature, two opposing effects come into play: the modification of the velocity field and the modification in the effective flow cross-sectional area. The former effect is dominant for small values of L, which culminates in an increase in effective slip length for increasing θ. The later effect dominates for large values of L, which leads to decreasing values of effective slip length for increasing θ. Negative values of effective slip length (corresponding to an increase in flow resistance relative to the baseline no-slip microchannel) are liable to be encountered for large values of L and large positive values of θ. However, for the same corresponding values of L, δ and θ, longitudinal grooves are found to be consistently superior to transverse grooves in terms of effective slip performance. Furthermore, for longitudinal grooves, it is interesting to note that there appears to be a value of θ for which the normalized effective slip length λ/(δe) is almost independent of L and shear-free fraction δ. All the plots corresponding to different values of L and δ appear to intersect at θ ≈ 3°.
3.5 Effects of flow geometry for small values of Re
The previous sections have focused exclusively on the flow through microchannels. In this section, in order to assess the effects of bulk flow geometry, the effective slip performance of the flow through microchannels and microtubes containing superhydrophobic transverse grooves will be compared.
Figure 11 illustrates the dependence of the normalized effective slip length λ/(δe) on the interface protrusion angle θ for both the microchannel and microtube flows corresponding to shear-free fractions δ of 0.5 and 0.75. The Reynolds number Re is fixed at 0.1, and the relative groove–rib periodic spacing L (L = E/(H/2) for channel flow; L = E/R for pipe flow) has been held constant at a relatively small value of 0.125. For each shear-free fraction δ, results for the effective slip length versus interface protrusion angle θ show almost perfect agreement for both the channel and tube flows. This substantiates the notion that for sufficiently small values of L, where the periodic spacing between the superhydrophobic features is small compared to the characteristic length scale of the bulk flow geometry, the effective slip behavior is independent of L, but only depends on the details of the geometry associated with the superhydrophobic features. Hence, for the case of transverse grooves, for small values of L, the normalized effective slip length λ/(δe) is only a function of δ and θ, but is independent of L and bulk flow geometry. In addition, in the light of the work of Davis and Lauga (2009) and Ng and Wang (2011), for small values of L and θ, λ/(δe) is solely a function of θ, but is independent of δ, L, flow type and bulk flow geometry. For small values of L, the critical interface protrusion angle θ c remains almost invariant at approximately 62°–65° for both the channel and tube flows over a wide range of shear-free fractions δ.

The normalized effective slip length plotted against the interface protrusion angle θ for both tube (symbols) and channel flows (lines) for L = 0.125. The analytical solutions given by Eq. (11) (black hollow stars) corresponding to θ = 0° and δ values of 0.5 and 0.75 are also shown
The dependence of the effective slip length on θ for the tube flow is shown in Fig. 12 for a shear-free fraction δ of 0.5 for a range of L values. Similar to the channel flow depicted in Fig. 8a, the critical interface protrusion angle θ c exhibits a monotonic reduction corresponding to an increase in L. However, for sufficiently large values of L, the effective slip performance is no longer independent of the bulk flow geometry. For example, corresponding to L = 4 and δ = 0.5, θ c ≈ 44° and 50° for the tube flow and channel flow, respectively.

The normalized effective slip length plotted against the interface protrusion angle θ for various values of L corresponding to a shear-free fraction of 0.5 for the tube flow. The analytical solution given by Eq. (11) (black hollow star) corresponding to θ = 0° and δ = 0.5 has also been shown
3.6 Effects of δ, Re and flow geometry for small L and flat interface
In this section, the effects of Reynolds number Re on the effective slip behavior of two flow geometries with a flat shear-free interface (θ = 0°) for various values of δ at L = 0.125 will be explored. Figure 13 shows that for sufficiently small values of L and Re, corresponding to a fixed value of δ, the normalized effective slip length λ/(δe) asymptotes to a constant value, which is independent of flow geometry. This conclusion has previously been documented in previous studies (Philip 1972a, b; Lauga and Stone 2003; Teo and Khoo 2009). Departing from the Stokes flow regime (\(Re \ll 1\)), the effective slip length λ/(δe) decreases with increasing Reynolds number Re, regardless of the flow geometry. The reduction in λ/(δe) is marginal for small shear-free fractions (δ = 0.25), but becomes substantial for large shear-free fractions (δ = 0.75) when Re exceeds 100. Furthermore, it should be noted that the decrease in λ/(δe) is stronger for the tube flow geometry than the channel flow geometry.

The normalized effective slip length plotted against the Reynolds number Re for both channel and tube flows corresponding to shear-free fractions δ = 0.25, 0.5 and 0.75 with L = 0.125 and θ = 0°
To provide further insights regarding the effects of Re on the flow field for the tube flow, Fig. 14 shows the normalized streamwise velocity along the shear-free interface and wall shear stress distributions along the no-slip ribs for L = 0.125, δ = 0.5 and Re = 0.1, 100 and 1,000. In the low Re Stokes flow regime (Re = 0.1), the flow is kinematically reversible, and thus, the interface streamwise velocity and wall shear stress distributions are symmetric about the groove center (x = 0). In contrast, when Re = 1,000, there is substantial asymmetry in the interface streamwise velocity and wall shear stress distributions about the groove center. This asymmetry is presumably due to enhanced flow inertial effects as Re increases. The asymmetry in wall shear stress is manifested as a substantial increase in the wall shear stress magnitude along the ribs immediately downstream of the shear-free grooves, and a reduction in the wall shear stress magnitude along the ribs immediately upstream of the grooves. The increase in wall shear stress downstream of the grooves outweighs the reduction upstream, thus culminating in a gradual reduction in effective slip length as Re increases.

a The normalized streamwise velocity magnitude along the shear-free interface. b–d The normalized wall shear stress along the transverse ribs for interface protrusion angle θ = 0° with shear-free fraction δ = 0.5, L = 0.125 and Re = 0.1 (b), 100 (c), 1,000 (d)
3.7 Effects of Re and flow geometry for large L and curved interface
In the previous section, it has been shown that for a flat liquid–gas interface (θ = 0°), an increase in Re results in a concomitant decrease in the normalized effective slip length for fixed values of δ and small L. In this section, the consequences of interface curvature and Re on the effective slip performance are investigated. Numerical simulations are performed for both the channel and tube flows over the allowable θ range at Re = 0.1 and 100, δ = 0.5 and L = 4, the results of which are summarized in Fig. 15. It can be seen that when θ < 30°, the normalized effective slip length decreases corresponding to an increase in Re for both the channel and tube flow geometries. However, when θ > 30°, variations in Re do not appear to have a significant effect on the normalized effective slip length. At Re = 100, the critical interface protrusion angle θ c for the channel and tube flows is 50° and 44°, respectively. These are almost identical to their corresponding values at Re = 0.1. A series of numerical simulations involving similar conditions as those adopted in Fig. 15 has also been performed, except that L was decreased to a small value of 0.125. Results for the normalized effective slip length corresponding to L = 0.125 have previously been presented in Fig. 11 for Re = 0.1. It has been found that the results remain invariant when Re increases from 0.1 to 100. This also implies that over this range of Re, the critical interface protrusion angle θ c remains approximately constant at 62°–65° for small values of L.

The normalized effective slip length plotted against the interface protrusion angle θ for both channel and tube flows corresponding to a shear-free fraction δ of 0.5, L of 4 and Reynolds number Re of 0.1 and 100
3.8 Comparison with experiments and limitations
To investigate the effects of liquid–gas interface curvature on the effective slip behavior, it is essential to draw comparisons between our numerical results and the corresponding experimental investigations mentioned in the Introduction. Using microparticle image velocimetry (micro-PIV), Byun et al. (2008) directly measured the velocity profiles of the microchannel flow over superhydrophobic surfaces containing transverse grooves and ribs. In addition to visualizing the transition from a Cassie state to a Wenzel state, they estimated the effective slip length by extrapolating the measured velocity profile of the flow in the near-wall region. For shear-free fractions δ ranging between 0.60 and 0.857, and L ranging between 0.125 and 0.7, they obtained effective slip length values ranging from 0.4 to 5.4 µm, which were smaller than the values obtained using the analytical solution for infinitesimal L in the absence of interface curvature (Eq. 11). Owing to the uncertainties arising from the use of extrapolation, they concluded that there was a limitation in the accuracy of their estimated effective slip lengths. Moreover, no information was provided regarding the detailed profiles of the curved interface and the extrapolation procedure. The lack of information thus renders it challenging to make systematic comparisons between their experimental results and the numerical results presented in this work.
Moreover, some crucial physical mechanisms which may exist in experiments have been excluded in our numerical modeling, thus potentially contributing to differences between experimental results and numerical predictions. For instance, Truesdell et al. (2006) and Choi and Kim (2006) reported that the effective slip length obtained from their experiments was at least an order of magnitude higher than predictions based on continuum mechanics. They suggested that the entrainment of air between the flowing liquid and the superhydrophobic surface might be responsible for the large effective slip lengths observed. Other aspects, such as impurities, wetting properties, surface charges, electrical properties, pressure (Lauga et al. 2007) and shear rates (Zhu and Granick 2001; Lauga and Brenner 2004), may also play roles in the effective slip behavior. All these physical mechanisms have not been accounted for in the present numerical work. On the other hand, several key assumptions have been made for the computational studies presented in this work. The first assumption involves the pinning of the contact line. Significant effects on the effective slip performance may result due to contact line depinning (Gao and Feng 2009). The second assumption involves the existence of a Cassie state. Byun et al. (2008) have previously documented and visualized the transition from a dewetted Cassie state to a wetted Wenzel state. Additionally, the viscous dissipation arising from the vapor flow inside the grooves culminates in a reduction in effective slip length (Maynes et al. 2007). This effect has also been excluded in the numerical modeling.
In addition, the effective slip behavior also strongly depends on the phase shift between the superhydrophobic patterns on both walls of the microchannel. In this paper, the transverse superhydrophobic grooves have been assumed to be arranged in-phase. It is conjectured that Reynolds number may have a stronger decreasing effect on the effective slip length if the grooves are patterned out of phase. Such phase shift effects incorporating the effects of interface curvature may be pursued in subsequent studies.
4 Conclusions
This paper investigated the effects of interface curvature on Poiseuille flow through microchannels and microtubes employing superhydrophobic surfaces with transverse grooves and ribs. The effects of shear-free fraction δ, normalized groove–rib periodic spacing L [L = E/(H/2) or E/R], bulk flow geometry (rectangular channel or circular tube), geometric configuration of superhydrophobic surface (transverse or longitudinal grooves) and Reynolds number on the effective slip behavior for various values of interface protrusion angle θ have been discussed in detail. From these discussions, several conclusions can be made:
-
(a)
The critical interface protrusion angle θ c for which the effective slip length becomes zero approaches 62°–65°, which is independent of the shear-free fraction δ, flow driving mechanism and flow geometry (channel and tube) in the low Reynolds number Stokes flow regime when L → 0.
-
(b)
Relaxing the infinitesimal L assumption, the critical interface protrusion angle θ c decreases with increasing L. For the same L and shear-free fraction δ, θ c is smaller for the tube flow than for the channel flow.
-
(c)
As the Reynolds number increases, the normalized effective slip length decreases. The decrease is more prominent for the tube flow than the channel flow.
-
(d)
Corresponding to a constant (large) L of 4 and a constant δ of 0.5, when the Reynolds numbers Re is increased from 0.1 to 100, the normalized effective slip length decreases noticeably when the interface protrusion angle is <30° for both the channel and tube flows. The critical interface protrusion angle θ c remains almost invariant.
-
(e)
For the same corresponding values of L, δ, and θ, longitudinal grooves are found to be consistently superior to transverse grooves in terms of effective slip performance.
References
Byun D, Kim J, Ko HS, Park HC (2008) Direct measurement of slip flows in superhydrophobic microchannels with transverse grooves. Phys Fluids 20(11). doi:10.1063/1.3026609
Cheng YP, Teo CJ, Khoo BC (2009) Microchannel flows with superhydrophobic surfaces: effects of Reynolds number and pattern width to channel height ratio. Phys Fluids 21(12). doi:10.1063/1.3281130
Choi CH, Kim CJ (2006) Large slip of aqueous liquid flow over a nanoengineered superhydrophobic surface. Phys Rev Lett 96(6). doi:10.1103/Physrevlett.96.066001
Cottin-Bizonne C, Barentin C, Charlaix E, Bocquet L, Barrat JL (2004) Dynamics of simple liquids at heterogeneous surfaces: molecular-dynamics simulations and hydrodynamic description. Eur Phys J E 15(4):427–438. doi:10.1140/epje/i2004-10061-9
Crowdy D (2010) Slip length for longitudinal shear flow over a dilute periodic mattress of protruding bubbles. Phys Fluids 22(12). doi:10.1063/1.3531683
Crowdy D (2011a) Frictional slip lengths for unidirectional superhydrophobic grooved surfaces. Phys Fluids 23(7). doi:10.1063/1.3605575
Crowdy D (2011b) Frictional slip lengths and blockage coefficients. Phys Fluids 23(9). doi:10.1063/1.3642621
Davies J, Maynes D, Webb BW, Woolford B (2006) Laminar flow in a microchannel with superhydrophobic walls exhibiting transverse ribs. Phys Fluids 18(8). doi:10.1063/1.2336453
Davis AMJ, Lauga E (2009) Geometric transition in friction for flow over a bubble mattress. Phys Fluids 21(1). doi:10.1063/1.3067833
Gao P, Feng JJ (2009) Enhanced slip on a patterned substrate due to depinning of contact line. Phys Fluids 21(10). doi:10.1063/1.3254253
Hyvaluoma J, Harting J (2008) Slip flow over structured surfaces with entrapped microbubbles. Phys Rev Lett 100(24). doi:10.1103/Physrevlett.100.246001
Lauga E, Brenner MP (2004) Dynamic mechanisms for apparent slip on hydrophobic surfaces. Phys Rev E 70:026311. doi:10.1103/PhysRevE.70.026311
Lauga E, Stone HA (2003) Effective slip in pressure-driven Stokes flow. J Fluid Mech 489:55–77. doi:10.1017/S0022112003004695
Lauga E, Brenner M, Stone H (2007) Microfluidics: the no-slip boundary condition. In: Tropea C, Yarin AL, Foss JF (eds) Handbook of experimental fluid dynamics, chap 15. Springer, New York. doi:10.1007/978-3-540-30299-5
Martell MB, Perot JB, Rothstein JP (2009) Direct numerical simulations of turbulent flows over superhydrophobic surfaces. J Fluid Mech 620:31–41. doi:10.1017/S0022112008004916
Maynes D, Jeffs K, Woolford B, Webb BW (2007) Laminar flow in a microchannel with hydrophobic surface patterned microribs oriented parallel to the flow direction. Phys Fluids 19(9). doi:10.1063/1.2772880
Ng CO, Wang CY (2009) Stokes shear flow over a grating: implications for superhydrophobic slip. Phys Fluids 21(1). doi:10.1063/1.3068384
Ng CO, Wang CY (2011) Effective slip for Stokes flow over a surface patterned with two- or three-dimensional protrusions. Fluid Dyn Res 43(6). doi:10.1088/0169-5983/43/6/065504
Ng CO, Chu HCW, Wang CY (2010) On the effects of liquid-gas interfacial shear on slip flow through a parallel-plate channel with superhydrophobic grooved walls. Phys Fluids 22(10). doi:10.1063/1.3493641
Ou J, Rothstein JP (2005) Direct velocity measurements of the flow past drag-reducing ultrahydrophobic surfaces. Phys Fluids 17(10). doi:10.1063/1.2109867
Ou J, Perot B, Rothstein JP (2004) Laminar drag reduction in microchannels using ultrahydrophobic surfaces. Phys Fluids 16(12):4635–4643. doi:10.1063/1.1812011
Philip JR (1972a) Flows satisfying mixed no-slip and no-shear conditions. Z Angew Math Phys 23(3):353–372. doi:10.1007/Bf01595477
Philip JR (1972b) Integral properties of flows satisfying mixed no-slip and no-shear conditions. Z Angew Math Phys 23(6):960–968. doi:10.1007/Bf01596223
Priezjev NV, Darhuber AA, Troian SM (2005) Slip behavior in liquid films on surfaces of patterned wettability: comparison between continuum and molecular dynamics simulations. Phys Rev E 71(4). doi:10.1103/Physreve.71.041608
Quere D, Lafuma A, Bico J (2003) Slippy and sticky microtextured solids. Nanotechnology 14:1109–1112. doi:10.1088/0957-4484/14/10/307
Sbragaglia M, Prosperetti A (2007) A note on the effective slip properties for microchannel flows with ultrahydrophobic surfaces. Phys Fluids 19(4). doi:10.1063/1.2716438
Steinberger A, Cottin-Bizonne C, Kleimann P, Charlaix E (2007) High friction on a bubble mattress. Nat Mater 6(9):665–668. doi:10.1038/Nmat1962
Teo CJ, Khoo BC (2009) Analysis of Stokes flow in microchannels with superhydrophobic surfaces containing a periodic array of micro-grooves. Microfluid Nanofluid 7(3):353–382. doi:10.1007/s10404-008-0387-0
Teo CJ, Khoo BC (2010) Flow past superhydrophobic surfaces containing longitudinal grooves: effects of interface curvature. Microfluid Nanofluid 9(2–3):499–511. doi:10.1007/s10404-010-0566-7
Truesdell R, Mammoli A, Vorobieff P, van Swol F, Brinker CJ (2006) Drag reduction on a patterned superhydrophobic surface. Phys Rev Lett 97(4). doi:10.1103/Physrevlett.97.044504
Tsai PC, Peters AM, Pirat C, Wessling M, Lammertink RGH, Lohse D (2009) Quantifying effective slip length over micropatterned hydrophobic surfaces. Phys Fluids 21(11). doi:10.1063/1.3266505
Wang LP, Teo CJ, Khoo BC (2013) Effects of interface deformation on flow through microtubes containing superhydrophobic surfaces with longitudinal ribs and grooves. Microfluid Nanofluid 1–12. doi:10.1007/s10404-013-1201-1
Watanabe K, Yanuar HM, Watanabe K (1999) Drag reduction of Newtonian fluid in a circular pipe with a highly water-repellent wall. J Fluid Mech 381:225–238. doi:10.1017/S0022112098003747
Zhu Y, Granick S (2001) Rate-dependent slip of Newtonian liquid at smooth surfaces. Phys Rev Lett 87:096105. doi:10.1103/PhysRevLett.87.096105
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Teo, C.J., Khoo, B.C. Effects of interface curvature on Poiseuille flow through microchannels and microtubes containing superhydrophobic surfaces with transverse grooves and ribs. Microfluid Nanofluid 17, 891–905 (2014). https://doi.org/10.1007/s10404-014-1367-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10404-014-1367-1