
Abstract
This work presents a prototype landslide early warning system (LEWS) adapted to real-time performance over the region of Catalonia (NE Spain). The system uses high-resolution rainfall information obtained from weather radar observations and susceptibility maps to issue a qualitative warning level at a regional scale. To study the influence of the mapping unit on the LEWS outputs, susceptibility maps obtained for Catalonia based on (i) pixels of different sizes and (ii) hydrological subbasins have been compared. The susceptibility has been derived using a simple fuzzy logic approach combining slope angle and land cover data. The susceptibility maps for the different mapping units have then been employed to run the LEWS for a period of 7 months (warm season of 2010). For each configuration, the performance, interpretability of the warnings, and computational requirements have been compared to assess the suitability of each mapping unit for their use in the LEWS in real time. The configuration using pixels of 30-m resolution as mapping units seems to be the best as a compromise between resolution, performance, and computational cost. However, from an end-user’s real-time perspective, the interpretation of the warnings can be difficult. Therefore, summarizing and visualizing the warnings, which are computed over the high-resolution grid, by subbasins is proposed as the best option.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Rainfall-triggered shallow slides and debris flows represent an important hazard that causes major economic losses and fatalities worldwide (e.g., Jakob and Hungr 2005; Froude and Petley 2018). Although these phenomena are not as widely reported in Catalonia (NE Spain) as they are in other regions, their hazard is still significant (Gallart and Clotet 1988; Portilla et al. 2010a; Hürlimann et al. 2014; Palau et al. 2017). Rainfalls that trigger shallow slides and debris flows are frequently rather short and intense (Guzzetti et al. 2008; Alfieri et al. 2012; Abancó et al. 2016), and its frequency is expected to increase due to climate change (Gariano and Guzzetti 2016). Building reliable early warning systems is of key importance to reduce the risk by increasing awareness and preparedness of communities which may be exposed (Alfieri et al. 2012; UNISDR 2015; Alcántara-Ayala et al. 2017).
In the recent years, regional landslide early warning systems (LEWSs) have been developed covering multiple areas worldwide, e.g., Japan (Osanai et al. 2010), Hong Kong (Lloyd et al. 2001), the Chinese Zhejiang province (Yin et al. 2008), Southern California (Baum and Godt 2010), Rio de Janeiro (Calvello et al. 2014), the Italian regions of Emiglia-Romana and Campania (Piciullo et al. 2017; Segoni et al. 2018), Norway (Krøgli et al. 2018), and the Catalan Pyrenees (Berenguer et al. 2015). These LEWSs frequently use susceptibility maps to depict the landslide-prone areas and assess whether a rainfall event might trigger a landslide by means of rainfall thresholds (Aleotti 2004; Baum and Godt 2010; Papa et al. 2013; Berti et al. 2015; Piciullo et al. 2017; Pan et al. 2018). The quality of both the susceptibility assessment and the rainfall data (as well as the rainfall intensity-duration thresholds) influence significantly the accuracy of the issued warnings.
Generally, the rainfall inputs are obtained from rain-gage measurements (Piciullo et al. 2017; Krøgli et al. 2018; Segoni et al. 2018). But in many cases, the density of rain-gage networks is low, especially in remote mountainous areas, and landslide-triggering rainfalls tend to be underestimated (Marra et al. 2014). For this reason, some large-scale (regional or global) LEWSs use radar rainfall observations (NOAA-USGS Debris Flow Task Force 2005; Chen et al. 2007; Osanai et al. 2010; Berenguer et al. 2015) or satellite rainfall products (Rossi et al. 2017; Kirschbaum and Stanley 2018).
Susceptibility maps describe the spatial distribution of the likelihood of having a landslide (Fell et al. 2008). When implemented into a LEWS, they are used to identify the locations where future events are more likely. Susceptibility maps relate landslide occurrence with a number of variables that control its initiation. However, obtaining high-resolution information of certain geotechnical variables directly related to landslide occurrence at regional scale is very difficult. As a consequence, susceptibility is usually characterized using morphological parameters obtained from digital elevation models (DEMs) and sometimes also includes geological and land cover information (Chevalier et al. 2013; Leopold et al. 2013; Liu et al. 2013; Bregoli et al. 2015; Kirschbaum et al. 2016; Wilde et al. 2018).
Susceptibility zoning is based on the discretization of the study region into homogeneous mapping units (Hansen 1984). Diverse mapping units have been used to report warnings, for example polygons (municipalities, catchments, etc.), lines (roads) or pixels (Lloyd et al. 2001; Liao et al. 2010; Huat et al. 2012; Berenguer et al. 2015; Krøgli et al. 2018; Segoni et al. 2018). Choosing an appropriate mapping unit for LEWS is not straightforward and requires considering several factors such as the resolution, the accuracy of the warnings, end-users’ interpretability of the results, and computational cost. In the past, some authors have studied the effect of using polygon or grid-cell mapping units in the performance of susceptibility assessments (Carrara et al. 2007; Calvello et al. 2013; Hürlimann et al. 2016). However, there is still no study on its influence on the performance of a LEWS.
The aim of this paper is twofold: (i) assessing the influence of the mapping unit on the outputs of a regional LEWS and (ii) selecting the most suitable mapping unit for a regional LEWS for Catalonia adapted to real-time performance. This has required the retrieval of the susceptibility map for Catalonia, which is a secondary goal of the presented work.
Settings
Geographic, Geologic, and Climatic Settings
The region of Catalonia is located at the NE of Spain and covers an area of around 32,000 km2. Its altitude ranges from sea level to 3143 m in the Pyrenees. From a geological point of view, Catalonia is located at the Iberian Plate. Its orography is the result of (i) the collisions of the Iberian Plate, the European Plate, and the African Plate during the Paleogene, forming the Pyrenees, the Catalan Coastal Range, and the Iberian Range; (ii) the deposition of its sediments in the Ebro Basin depressions; and (iii) the reactivation of pre-existing faults in an extensive context during the Miocene, forming a series of horsts and grabens more or less parallel to the actual coastline (Berastegui et al. 2010).
Catalonia’s climate is varied but can be classified as Mediterranean (Mira et al. 2017). Near the coast, the climate is mild and temperate. Inland, the climate is continental, with cold winters and hot summers. The Pyrenees present a high-altitude climate, with abundant snow and temperatures below 0 °C during winter. The rainiest seasons are generally spring and autumn with the exception of the Pyrenees where the rainiest season is summer. The majority of the landslides are triggered by either (i) convective rainfall events with high intensities, which are typical from mid-summer to early autumn, and (ii) long-lasting rainfalls with moderate intensities, common during spring and autumn (Corominas et al. 2002; Abancó et al. 2016).
Datasets used
The majority of LEWS methods use susceptibility and rainfall information. Here, we describe the data that has been used to implement our prototype LEWS. A full description of the method is presented in the section “General methodology.”
The rainfall datasets used in this study are radar-based quantitative precipitation estimates (QPEs), specifically 30-min rainfall accumulations with a spatial resolution of 1 km. These maps have been produced with the Integrated Tool for Hydrometeorological Forecasting (EHIMI) (Corral et al. 2009) from the volume scans of the Creu del Vent single-polarization C-band Doppler radar of the Meteorological Service of Catalonia (SMC). The location of the radar is shown in Fig. 1. The EHIMI tool includes a chain of correction and quality control algorithms to generate the QPE products from raw radar observations.

a Overview map of Catalonia. The red rectangles show the areas where landslide inventories exist in (1) NW Catalonia, (2) NC Catalonia, and (3) NE Catalonia. The yellow circle represents the location of the CDV C-band weather radar. R, E, P, and M show respectively the locations of Rebaixader, Erill, Portainé, and Santa Maria, where landslide events were reported during 2010 (see the section “Performance of the LEWS with the different mapping units”). b Inventory of landslide locations in the three areas shown with the red rectangles in panel a
To derive the susceptibility maps, the 5-m-resolution DEM of Catalonia (ICGC 2013) has been used. Additionally, information on land use and land cover (LULC) has been obtained from the Map of Soil Coverage of Catalonia (MCSC-4, CREAF 2009).
Information of historic and recent shallow slides and debris flows contained in the inventories of three zones located in the Pyrenees and the Pre-Pyrenees (Fig. 1b, Table 1) has been used for the susceptibility assessment. The NW Catalonia inventory is the most recent and accurate and consists of 908 events. These events were principally identified by means of interpretation of aerial photos, and both 2D and 3D digital orthophotos (Chevalier 2013; Shu et al. 2019). The NC Catalonia inventory is composed of 1249 landslide events. The majority of these events were triggered by the extraordinary rainfall episode of 7–8 November 1982 and were geolocalized on topographic maps during field surveys and photointerpretation (Gallart and Clotet 1988). The spatial accuracy of this inventory is the lowest. Finally, the NE Catalonia inventory contains 317 landslides. Many of them were triggered by the catastrophic October 1940 rainfall event, and the geolocalization of these landslides was done by analysis of the 1956–1957 aerial photographs taken by the Spanish Army Geographical Service (Portilla Gamboa 2014). Further details about the three inventories and its analysis can be found in Hürlimann et al. (2016).
General methodology
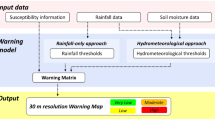
The prototype LEWS applied in this study has been designed with the aim of working in real time and has the purpose of issuing warnings to the authorities in charge of managing the risk. It is based on the scheme developed by Berenguer et al. (2015), which was applied in two study areas in the Catalan Pyrenees. Its inputs are (i) susceptibility information and (ii) gridded rainfall observations. The output of the LEWS is a map showing a qualitative warning level (“very low,” “low,” “moderate,” and “high”) for each mapping unit every time new rainfall observations are available (in this case, every 30 min, see the section “Datasets used”). Figure 2 shows a general scheme of the system. Its components are shown in the sections below.

General flow chart of the prototype LEWS algorithm
Susceptibility analysis
A static susceptibility map is used by the LEWS to distinguish landslide-prone areas. The susceptibility map for Catalonia has been derived combining the slope angle and land cover. The method used for susceptibility mapping (similar to that of Berenguer et al. 2015) is described in detail in the section “Susceptibility map of Catalonia.” It employs the fuzzy logic approach (Mendel 1995) to classify the susceptibility into four categories: very low, low, moderate, and high.
Characterization of the rainfall hazard level
Rainfall intensity-duration (I-D) relationships are widely used in LEWS to assess the hazard posed by a rainfall situation. In Catalonia, no comprehensive I-D thresholds are available, only preliminary rainfall thresholds based on daily rainfall records or thresholds at catchment scale exist (e.g., Corominas 2000; Abancó et al. 2016). Thus, to assess the magnitude of rainfall situations in the analysis domain, we have used the intensity-duration-frequency (IDF) curves of the Fabra meteorological observatory in Barcelona (Casas et al. 2004) as reference. The IDF curves are the base to define four rainfall hazard levels: very low, low, moderate, and high (Fig. 3). The definition of the thresholds has been done empirically with the following criteria: for the high rainfall hazard, the I-D curve for a return period of 5 years has been used. In addition, the two other thresholds (lower limit of hazard levels (moderate and low)) were defined as parallel I-D curves that are below the 2-year return period. Although these thresholds do not directly relate rainfall with landslide occurrence, their slopes are very similar to the ones of local rainfall thresholds obtained for specific sites in Catalonia (e.g., Abancó et al. 2016; Hürlimann et al. 2017).

Rainfall intensity-duration thresholds. The background green, yellow, orange, and red colors represent the four rainfall hazard level classes: “very low,” “low,” “moderate,” and “high,” respectively
Definition of the warning level
Combining the susceptibility of the mapping unit and the magnitude of the rainfall event, the LEWS issues a warning. While susceptibility is considered to be static (it remains constant in time), rainfall inputs are updated every 30 min. The combination of the susceptibility and rainfall hazard is done according to the warning level matrix of Fig. 4. The result for each time step is a qualitative warning level for each mapping unit of one of the following four classes: very low, low, moderate, and high.

Warning level matrix. Rows represent the rainfall hazard level; columns represent the susceptibility degree. “VL,” “L,” “M,” and “H” stand for “very low,” “low,” “moderate,” and “high” warning levels, respectively
Each warning level class aims at assessing the possibility of having a shallow slide or debris flow; i.e., increasing the warning level implies increasing the probability of the expected event.
Susceptibility map of Catalonia
One of the requirements to extend the LEWS to Catalonia is mapping the susceptibility over the entire region. Up to the date, there is no susceptibility assessment spanning the whole region. This section first presents the methodology used to derive the susceptibility map with different mapping units, and next, the different susceptibility maps are evaluated (i) by visual inspection and (ii) from a quantitative point of view in a validation framework.
Susceptibility mapping methodology
Chevalier et al. (2013) analyzed the skill of different morphological parameters obtained from the DEM to assess the susceptibility of shallow slides and debris flows. Their results showed that the most significant governing factor was the terrain slope angle. Though, they did not include information associated with the soil layer in their analysis. Some authors (Nadim et al. 2006; Ciurleo et al. 2016; Wilde et al. 2018) have used information contained in geological maps to assume geotechnical properties of the soil. However, in Catalonia, the geological map mostly lacks information on surficial formations. Thus, a reasonable alternative consists in using LULC information, as proposed by several authors (e.g., Hürlimann et al. 2016; Pisano et al. 2017; Gariano et al. 2018). LULC provide indirect information of sediment availability. In addition, the vegetation plays an important role in slope stability (e.g., evapotranspiration, suction, apparent cohesion given by the plant roots) (Schmidt et al. 2002; Schwarz et al. 2010). The removal of vegetation generally increases susceptibility (Persichillo et al. 2017; Pisano et al. 2017). For these reasons, the susceptibility map of Catalonia presented herein has been derived using slope angle and LULC, which are datasets currently available not only in Catalonia but also in most countries.
Susceptibility maps of two main types have been derived: (i) raster grids of different resolutions (5 m, 30 m, 200 m, and 1 km, and (ii) a subdivision of the analysis domain in hydrological subbasins (including 1st, 2nd, and 3rd orders, following the method of Strahler 1957). The mean area and the standard deviation of these subbasins are 2.1 km2 and 1.6 km2, respectively. For the map based on raster grids, the 5-m DEM has been upscaled to obtain the DEMs of lower resolutions and the slope angle of each resulting cell has been computed using GIS tools.
The 241 original land cover classes of the LULC map have been reclassified into 11 classes that were significant in terms of slope stability following the Corine land cover classification (EEA 1990). As the original land cover map was rasterized at a resolution of 5 m, we had to adopt a criterion to upscale the information to 30-m, 100-m, 200-m, and 1-km resolutions and subbasins. Finally, we have chosen to assign the most susceptible land cover class to the larger mapping unit, on the condition that this class is representative enough (it occupies at least 15% of the (larger) terrain unit). This methodology is quite feasible but decreases land cover variability with decreasing resolution and biases it towards more susceptible classes as it can be seen in Fig. 5.

Maps of the NW Catalonia study area. The upper and the bottom rows show respectively the land cover maps and the slope angle maps with pixel resolution of a, d 30-m, b, e 1-km, and c, f hydrological subbasins, respectively
Slope angle and land cover have been combined to retrieve the susceptibility maps using a fuzzy logic classifier (Mendel 1995). Compared to statistical methods, the fuzzy logic approach has the following advantages: (i) it is able to model the nonlinear behavior of the susceptibility input variables, (ii) it uses expert criteria to assess the uncertainty of input parameters and landslide inventories, and (iii) it is simple and can be easily adapted to different regions.
The used fuzzy logic classifier requires a weight for each input variable (slope and land cover) and membership functions for each input variable and each susceptibility class (very low, low, moderate, and high). Membership functions measure how realistic it is that a mapping unit where one variable takes a value x belongs to a certain susceptibility class. Here, similarly as Berenguer et al. (2015), the membership functions and weights for the slope angle and the land cover have been designed by an expert using subjective criteria by taking the information of landslide frequency distributions of a random subset containing half of the points of the landslide inventory as a reference (not shown). Slope angle membership functions have been adapted for all the different mapping units (Fig. 6a–c). In contrast, land cover landslide frequency distributions are very similar for all the mapping units, and thus, the same membership functions set has been adopted for all mapping units (Fig. 6d).

Slope membership functions for pixels with a resolution of a 30-m, b 200-m, and c hydrological catchments. d Land cover membership functions. Green, yellow, orange, and red lines represent the membership functions of “very low,” “low,” “moderate,” and “high” susceptibility
From these membership functions, the membership degree to a susceptibility class (MS) assesses the feasibility that a mapping unit belongs to it. Its value ranges from 0 to 1 and has been computed as follows:
where wsl and wlc are the weights of slope and land cover, respectively; μsl, S is the membership degree for the slope and for a susceptibility class (S); and μlc, S is the land cover membership degree for a susceptibility class (S).
The susceptibility class having the highest membership degree (i.e., higher possibility of having landslides) has been assigned to each terrain unit. That is
where S states for the susceptibility class and MVL, ML, MM, and MH for the membership degree of the classes very low, low, moderate, and high, respectively.
Comparing the different susceptibility maps
The fuzzy logic classifier has been applied to create landslide susceptibility maps covering the region of Catalonia using 5-m, 30-m, 100-m, 200-m, and 1-km grid cells and subbasins as mapping units. The susceptibility map based on 30-m grid cells shows variability, with the areas having higher susceptibility located in the mountainous regions of the Pyrenees and the Catalan Coastal Ranges (Fig. 7). The flat areas of the low Ebro Basin generally present very low susceptibility. The results for the other mapping units (not shown here) are relatively similar.

Susceptibility map of Catalonia using 30-m grid cells as mapping units
The resulting susceptibility maps based on the different mapping units for the NW Catalonia zone are shown in Fig. 8. In this area located in the Axial Pyrenees, the 5-m-, 30-m-, 100-m-, and 200-m-pixel susceptibility maps include large parts of moderate and high susceptibility.

Susceptibility maps of the NW Catalonia study area. a 5-m, b 30-m, c 100-m, d 200-m, and e 1-km grid cells. f Hydrological subbasins
Unlike pixel-based susceptibility maps, the susceptibility map of hydrological subbasins does not cover the entire domain and classifies almost all the mapping units in the NW Catalonia zone as moderate and high susceptibility (Fig. 8f). However, the percentage of area occupied by these two classes is similar to the area occupied by the same two classes in the map that uses pixels of 5-m resolution as mapping units (Table 2). The main difference relies on the percentage of area classified as very low and low susceptibility classes which is much smaller for the map of subbasins. This can be partly explained because the subbasin map covers mainly the upstream parts of the domain where slope is generally steeper, and therefore typically, it corresponds to areas that are more susceptible.
Regarding the three inventory subdomains (presented in the section “Datasets used” and in Fig. 1), the area occupied by moderate and high susceptibility grid cells reduces with decreasing resolution to the point that the map of 1-km pixels classifies more than half as very low and low susceptibility.
Validation of the susceptibility maps
The resulting susceptibility maps have been evaluated using the landslide data that were not used for the calibration (i.e., retrieval of the membership functions and weights). The evaluation has been done with receiver operating characteristic (ROC) curves (Fawcett 2006): For each susceptibility class, the false-positive rate (fpr) and the true-positive rate (tpr) have been computed, and the area under the curve (AUC) is the metric that has been used to assess the model performance. The AUC is a measure of how well a susceptibility classifier can distinguish between mapping units with and without landslide observations. The perfect discriminant is a susceptibility classifier that achieves an AUC equal to 1. The larger the AUC, the better is the classification of the susceptibility map.
Our results show that generally, the AUC of the grid cell susceptibility maps slightly decreases with decreasing resolution. Combining the three inventory zones, its AUC values range from 0.59 to 0.67 (Fig. 9, Table 3). The smallest AUC is obtained for the susceptibility map based on 1-km grid cells. In general, the results in the NC Catalonia zone are the worst, with AUC values ranging from 0.52 to 0.56 (Fig. 9, Table 3). On the other hand, the region with the highest AUC values is the NW Catalonia zone where the most complete and recent inventory is available.

ROC curves of the 5-m, 30-m, 100-m, 200-m, and 1-km grid cell–based susceptibility maps at a NW Catalonia, b NC Catalonia zone, c NE Catalonia zone, and d all zones. The horizontal axis represents the false-positive rate (fpr), and the vertical axis represents the true-positive rate (tpr)
The comparison of grid cell–based susceptibility maps that cover all the analyzed domains and subbasin-based susceptibility maps that cover only part of it is challenging. To do so, pixel-based maps have been clipped with the catchment polygons. The resulting grid cell susceptibility maps covered the same area as the subbasin susceptibility maps and were validated using ROC analysis.
Consistently, the AUC of the clipped grid cell susceptibility maps decreases with decreasing resolution. The smallest AUCs of the clipped grid cell and the subbasin-based susceptibility maps are obtained in the NC Catalonia domain (Table 3). As it can be seen in Fig. 10 and Table 3, the performance of subbasin-based map is slightly better than the performance of 100-m grid cell susceptibility map and it only achieves a smaller AUC in the NW Catalonia zone.

ROC curves comparing the performance of the susceptibility maps over the area occupied by hydrological catchments. a NW Catalonia. b NC Catalonia. c NE Catalonia. d Three inventory zones. The horizontal axis represents the false-positive rate (fpr), and the vertical axis represents the true-positive rate (tpr)
Therefore, for both the domain defined by grid cells and the domain defined by subbasins, the best susceptibility map is the one based on 5-m-resolution pixels. The poor results obtained in the NC Catalonia zone can be, at least partly, explained by the lower quality of the landslide inventory in this domain (especially in the accuracy of the landslide location). Apart from the map based on 1-km grid cells, the obtained susceptibility maps have an acceptable performance and could therefore be used for LEWS.
Performance of the LEWS with the different mapping units
In this section, the LEWS presented in the section “General methodology” has been run from April to October 2010 to analyze the effect of the mapping units on the landslide warnings over Catalonia. With this aim, the LEWS has been set up using the different mapping units for which the susceptibility maps have been obtained in the section “Susceptibility map of Catalonia.” Specifically, the analyzed mapping units are (i) 30-m grid cells, (ii) 200-m grid cells, and (iii) hydrological subbasins. Running the LEWS using 5-m grid cells is still computationally too expensive, and this configuration has been discarded in this part of the analysis. The LEWS time resolution is 30 min for all the tested setups.
The performance of the LEWS with the different configurations has been analyzed in terms of (i) the number of days with warnings for the different mapping units and (ii) its ability to identify the occurrence of specific events that took place during the studied period and for which the exact or approximate triggering time is known. Finally, some discussion about the computational cost to run the LEWS with the different mapping units is provided.
Number of warnings during the studied period
The total number of days during which moderate or high warning levels were issued at least once for each mapping unit is summarized in Fig. 11. The results show that the areas where these warnings were issued coincide with the zones of high susceptibility mostly located in the Pyrenees and Pre-Pyrenees.

Number of days of the period April–October 2010 during which “moderate” and “high” warning levels were issued (at least for a 30-min time step of the day). a Pixels of 30 m. b Pixels of 200 m. c Subbasins. A zoom into the area enclosed by the black dashed rectangle is portrayed in d, e, and f for the 30-m, 200-m, and subbasin mapping units, respectively
The 30-m grid cell configuration issued a moderate or high warning level during more than 6 days in over 0.09% of Catalonia (Table 4). This percentage of area is higher for the setup using hydrological subbasins (0.36%). On the other hand, the 200-m-resolution grid cell configuration issues moderate or high warning levels only in around 0.01% of Catalonia.
The validation of the results of the LEWS in Catalonia is challenging because the areas with a large number of days with warning are mainly located in highly inaccessible mountainous regions. When an event occurs, it is hardly reported because typically no infrastructures, buildings, or roads are affected, and no multi-temporal landslide inventories are available.
The number of days with warnings is a qualitative result that gives an idea that the number of false positives is reasonable: warnings are generally located in the most susceptible areas that were affected by important rainfall amounts and are issued at most 15 days of the 214 days that comprise the analyzed period. Alternatively, to evaluate the LEWS results using the different mapping units, we have focused on some specific catchments where landslide reports were available during the analyzed period.
Validation in specific sites
The performance of the LEWS with the different setups has been analyzed in two catchments where debris flows have been detected during the analyzed period of 2010. These two monitored catchments (Rebaixader and Erill) are both located in the NW part of Catalonia (Fig. 1).
Although the Rebaixader catchment is relatively small (0.80 km2), it is one of the most active torrents in the Catalan Pyrenees and has been monitored since 2009 (Hürlimann et al. 2014). The debris flow initiation zone is located in a steep scarp in a lateral moraine. The catchment sediment supply is assumed to be almost unlimited. During the analyzed period, the monitoring system recorded the second largest debris flow since 2009 (on 11 July 2010, with an estimated volume of 12,500 m3) and also two debris floods that mobilized smaller volumes (on 21 July and 9 October 2010).
The Erill catchment, with a drainage area of 3.30 km2, is close to the Rebaixader, and the outcropping material is similar. A monitoring station was installed in 2005 (Raïmat Quintana 2018) and detected one debris flow during the studied period (on 22 July 2010).
The LEWS outputs show that the events reported during the 7-month period in the two catchments mentioned above are generally associated with moderate or high warning levels (the results are summarized in Table 5 and Fig. 12).

Site-specific validation of the LEWS. At the Rebaixader monitoring site, a 11 July 2010 debris flow, b 21 July 2010 debris flood, and c 9 October 2010 debris flood. At Erill, d 22 July debris flow, and the two rainfall events that did not turned on the monitoring system, and e 2 July 2010 and f 11 July 2010. The black line represents the 30-min rainfall intensity observed by the weather radar. The horizontal color bars show the maximum warning level time series observed within the catchment for the analyzed mapping units. Green, yellow, orange, and red represent “very low,” “low,” “moderate,” and “high” warning levels, respectively. The red dashed line indicates the time when the debris flow or debris flood was detected by the monitoring station
In the Rebaixader catchment, the three recorded events were triggered by rather intense rainfall episodes. All the LEWS configurations determine moderate or high warning levels, for the 11 July 2010 debris flow and the 9 October 2010 debris flood (Table 5, Fig. 12a, c). However, the LEWS was not able to issue a warning for the 21 July 2010 rainfall event, when a small debris flood was detected (Table 5, Fig. 12b), because the rainfall intensities were just below the very low–low threshold.
Similarly, in the Erill catchment, the recorded debris flow was triggered by intense rainfall. The LEWS results show that both grid cell configurations identify the event with a high warning level and the subbasin configuration identifies it with a moderate warning level (Fig. 12d, Table 5).
The number of recorded events at Rebaixader and Erill has been compared with the number of days that achieved a maximum warning level of moderate or high classes (Table 6). The LEWS performance at these two specific catchments has been assessed by calculating the true positives, false positives, and misses, using the subbasin where the sensors were installed as the mapping unit for evaluation. True positives are defined as the number of rainfall events during which the monitoring systems detect a debris flow or debris flood and the LEWS issues a moderate or high warning level within the catchment. False positives are rainfall events with a moderate or high warning level within the catchment, but during which, no landslide event is detected. Misses are rainfall events during which the monitoring systems record a debris flow or debris flood, but the LEWS is not switching into a moderate or high warning level in any mapping unit.
In the analyzed catchments, all the tested configurations have the same number of true positives and misses. However, the number of false positives seems to increase with the resolution of the mapping unit, particularly in Erill (Table 6). The difference in the number of false positives between both 30-m and 200-m grid cell mapping units are due to the larger area classified as “highly” susceptible in the 30-m grid cell map at the Erill catchment (Fig. 13a, b).

Analysis of false-positive warning issues at Erill. The top panel displays the susceptibility map based on a 30-m and b 200-m grid cells and c subbasin mapping units. The middle panel shows the maximum warning level for the three mapping units at Erill during the 2 July 2010 rainfall event. The bottom panel presents the maximum warning level for the three configurations during the 11 July 2010 rainfall. See text for detailed explanations
The false positives at Erill have been further examined. Our analysis shows that the significance of the false positives depends on the area (number of pixels) of the subbasin where a moderate or high warning level is issued and its location. Since the monitoring station is located at the catchment outlet, small landslides or debris flows happening near the headwaters and traveling short distances are perhaps not detected. Therefore, false positives due to a few headwaters’ pixels with moderate or high warnings are not very significant. In contrast, a false positive is more relevant if pixels with moderate or high warnings are located close to the outlet or affect a large portion of the catchment.
During the analyzed period, a false positive with low significance was issued for the 11 July 2010 event by the 30-m grid cell configuration at the Erill (Fig. 12f), when a moderate warning was released. However, the moderate warning was caused by a very small area (4% of the entire basin) located in the highest part of the catchment, where the radar recorded larger amounts of rain (Fig. 13g). In addition, the grid cell configurations issued another false positive that affected a portion of the Erill catchment near the outlet (Fig. 13d, e) during the 2 July 2010 event. However, the area over which both configurations issued the warning was different. On the one hand, the 200-m grid cell setup issued moderate warnings over only 1.3% of the catchment area; therefore, its significance was low. On the other hand, the 30-m grid cell setup issued moderate warnings over a larger area (4.8% of the subbasin); therefore, its significance was larger.
Additionally, the outputs of the three LEWS configurations have also been checked for the reported events in two supplementary unmonitored catchments, where three events were reported: Portainé and Santa Maria (Fig. 1). The Portainé catchment has an area of 2.50 km2. Two debris flow events affected a secondary road and a small dam located downstream: one occurred on 22 July 2010 with a mobilized volume of 25,000 m3 and a smaller one on 12 August 2010 (Palau et al. 2017). Santa Maria is a 1.70-km2 catchment located in the mountain of Montserrat. Shallow slides and debris flows were reported there by road and railway–managing authorities during the night of 10 October 2010.
The 30-m gridded setup was able to correctly issue a moderate or high warning level coinciding with the approximate time of the events in Portainé and Santa Maria (Table 7). On the other hand, the 200-m setup failed to issue a warning for the Portainé 22 July 2010 debris flow, and the subbasin setup missed both events at Portainé. The computation of the total number of true positives, false positives, and misses has not been possible for these two sites because only the events that affected important infrastructures were reported.
In summary, the results obtained with the different configurations of the LEWS are quite similar and show coherence. The main difference is the lower number of false positives obtained with the subbasin setup. However, the 200-m grid cell and the subbasin configurations also present additional misses at Portainé (Table 7). It is worth noticing though that one of the 30-m grid cell configuration false positives is issued over a very small area at the catchment headwaters, and therefore, its significance is low.
Computational requirements
One of the criteria that strongly influence the feasibility to apply the LEWS in real time at regional scale is the computational cost, which should allow us to update the warning level every time new rainfall observations are available within a short time. Herein, we have analyzed the computational cost to run one time step over Catalonia with the different configurations analyzed in the section “Performance of the LEWS with the different mapping units.”
To fulfill the computations, we have used a server with two 12-core 3.5 GHz CPUs and 48 GB of RAM. With the current version of the code, the time needed to fulfill one time step over the entire Catalonia is around 1.5 min, 2.9 s, and 0.7 s for the case of 30-m grid cells, 200-m grid cells, and subbasins, respectively. The computational cost increases with the area of the domain covered by rain. In either case, the three mapping units could be used to compute warnings operationally. In the section “Susceptibility map of Catalonia,” we have decided that it is not yet feasible to run the 5-m grid over Catalonia because with the current version of the codes completing the calculation of one time step through Catalonia requires around 50 min, still far from real-time requirements.
Discussion and conclusions
This study assesses the influence of the mapping unit into the outputs of a regional-scale LEWS with the aim of selecting the most suitable mapping unit for a real-time LEWS for Catalonia. Susceptibility maps covering Catalonia have been obtained, combining the maps of slope and land cover with a fuzzy logic approach. This simple methodology has been applied to obtain and compare susceptibility maps based on different mapping units (pixels of several resolutions and hydrological subbasins), which have been applied to run a LEWS method in the region of Catalonia during 7 months of 2010.
The evaluation of the susceptibility maps has been done using part of the inventory available in three subdomains in the Catalan Pyrenees and Pre-Pyrenees. The results show that for the gridded susceptibility maps, its quality decreases with resolution, whereas the one obtained on a subbasin division performs slightly better than the map based on pixels of 100-m resolution.
The analysis of the performance of the LEWS with the studied mapping units shows that landslide warnings were generally located at susceptible areas affected by large rainfall amounts. Results show that the area where the warnings were issued increases with the mapping unit resolution for the grid cell setups but is higher for the subbasin configuration. Due to the lack of systematic landslide reports, the evaluation of the performance remains a challenge and has been done for specific locations with reported shallow slides and debris flow events. The subbasin setup has failed to issue a warning for three landslides that were recorded at the selected sites. The number of misses decreases with the resolution. While the 200-m grid cell configuration misses two landslide events, the 30-m grid cell setup misses only a debris flood but has an additional false positive. However, its significance is rather low.
Regarding the computational cost, as expected, the high-resolution configurations are more demanding than the coarser configurations. Regardless of that, with the exception of 5-m grid cells, all the studied configurations could be applied in real time.
Choosing the most appropriate mapping unit for operational LEWS purposes is not trivial. It must include a compromise between performance, resolution, and computational cost, whereas it must also consider the end-users’ interpretability of the warnings. In this sense, at a regional scale, the interpretation of the warnings is much easier for the subbasin configuration. However, grid cell configurations have a higher resolution and display the possible landslide initiation zones with more detail.
Based on the results obtained for the analyzed period and monitored sites (a more extensive evaluation over longer periods of time and with a larger number of landslide reports would be required to make the results more conclusive), the best option may be working with 30-m grid cells to compute the warnings and present them in subbasins displaying the maximum warning level of the enclosed pixels. This approach simplifies the assessment at regional scale without losing the extra information contained in the pixel data. If a warning is issued for a given catchment, detailed information on the possible landslide-triggering areas can be displayed when zooming into it. Thus, this solution enhances the understanding of the situation and enables to allocate the available resources in the most problematic places. A similar solution has been adopted in the SIGMA model (Segoni et al. 2018) where three types of mapping units are used (alert zones, municipalities, and 100-m grid cells).
One aspect that is fundamental to guarantee the performance of the LEWS is the quality of the rainfall inputs. In this regard, the use of radar QPE has clear advantages (i.e., good depiction of the variability of the rainfall field at high spatiotemporal resolutions), but it also needs careful processing of radar observations to guarantee the quantitative value of the rainfall products (e.g., Zawadzki 1984; Corral et al. 2009; Borga et al. 2014), since global or local biases of the rainfall field have a direct effect on the performance of the LEWS (it may lead to false positives and misses). It is also worth noting that the spatial resolution of the rainfall inputs (1 km) is much coarser than that of the LEWS (which matches the resolution of the susceptibility map). This difference, which can be seen in Fig. 13, implies that the small-scale variability of the rainfall field cannot be resolved and adds uncertainty in the performance of the LEWS.
A limitation of the current LEWS methodology is the lack of well-established rainfall thresholds in Catalonia. Therefore, IDF curves of a meteorological station were used to determine the rainfall hazard level. However, future advances on critical rainfall conditions in Catalonia would certainly improve the performance of the LEWS. An additional drawback is that the current thresholds account for neither the antecedent rainfall nor the soil moisture conditions. Using regional rainfall thresholds for landslides, as well as including antecedent rainfall or soil moisture information, could help reduce the number of false positives and therefore improve the performance of the LEWS (Mirus et al. 2018; Bogaard and Greco 2018).
Another important factor that could help improve the performance of the LEWS would be the distinction between weathering-limited and sediment-unlimited catchments. Weathering-limited catchments require a certain period between debris flow events to recharge the available sediment. Currently, the input susceptibility maps are static, and therefore, this condition is not considered by the LEWS.
Additionally, since most shallow slides and debris flows happen during or shortly after the triggering rainfall event to issue effective early warnings, the presented methodology should be implemented in real time using rainfall forecasts (Alfieri et al. 2012), for instance based on radar nowcasts (e.g., Berenguer et al. 2011) or high-resolution numerical weather prediction.
References
Abancó C, Hürlimann M, Moya J, Berenguer M (2016) Critical rainfall conditions for the initiation of torrential flows. Results from the Rebaixader catchment (Central Pyrenees). J Hydrol 541:218–229. https://doi.org/10.1016/j.jhydrol.2016.01.019
Alcántara-Ayala I, Murray V, Daniels P, McBean G (2017) International Council for Science (ICSU)-on the future challanges for the integration of science into international policy developement for landlide disaster risk reduction. Adv Cult Living Landslides 5:1–557. https://doi.org/10.1007/978-3-319-53483-1
Aleotti P (2004) A warning system for rainfall-induced shallow failures. Eng Geol 73:247–265
Alfieri L, Salamon P, Pappenberger F, Wetterhall F, Thielen J (2012) Operational early warning systems for water-related hazards in Europe. Environ Sci Pol 21:35–49. https://doi.org/10.1016/j.envsci.2012.01.008
Baum RL, Godt JW (2010) Early warning of rainfall-induced shallow landslides and debris flows in the USA. Landslides 7:259–272. https://doi.org/10.1007/s10346-009-0177-0
Berastegui X, Casas JM, Liesa M, Losantos M, Martínez A, Muñoz JA, Roca E (2010) Històtria geològica de Catalunya. Atles geològic de Catalunya:68–77
Berenguer M, Sempere-Torres D, Pegram GGS (2011) SBMcast - an ensemble nowcasting technique to assess the uncertainty in rainfall forecasts by Lagrangian extrapolation. J Hydrol 404:226–240. https://doi.org/10.1016/j.jhydrol.2011.04.033
Berenguer M, Sempere-Torres D, Hürlimann M (2015) Debris-flow forecasting at regional scale by combining susceptibility mapping and radar rainfall. Nat Hazards Earth Syst Sci 15:587–602. https://doi.org/10.5194/nhess-15-587-2015
Berti M, Martina MLV, Franceschini S, Pignone S, Simoni A, Pizziolo M (2015) Implementation of a probabilistic model of landslide occurrence on a civil protection alert system at regional scale. In: Engineering geology for society and territory - volume 2: landslide processes, pp 659–662
Bogaard T, Greco R (2018) Invited perspectives: hydrological perspectives on precipitation intensity-duration thresholds for landslide initiation: proposing hydro-meteorological thresholds. Nat Hazards Earth Syst Sci 18:31–39. https://doi.org/10.5194/nhess-18-31-2018
Borga M, Stoffel M, Marchi L, Marra F, Jakob M (2014) Hydrogeomorphic response to extreme rainfall in headwater systems: flash floods and debris flows. J Hydrol 518:194–205. https://doi.org/10.1016/j.jhydrol.2014.05.022
Bregoli F, Medina V, Chevalier G, Hürlimann M, Bateman A (2015) Debris-flow susceptibility assessment at regional scale: validation on an alpine environment. Landslides 12:437–454. https://doi.org/10.1007/s10346-014-0493-x
Calvello M, Cascini L, Mastroianni S (2013) Landslide zoning over large areas from a sample inventory by means of scale-dependent terrain units. Geomorphology 182:33–48. https://doi.org/10.1016/j.geomorph.2012.10.026
Calvello M, d’Orsi RN, Piciullo L, Paes N, Magalhaes M, Lacerda WA (2014) The Rio de Janeiro early warning system for rainfall-induced landslides: analysis of performance for the years 2010-2013. Int J Disaster Risk Reduct 12:3–15. https://doi.org/10.1016/j.ijdrr.2014.10.005
Carrara A, Crosta G, Frattini P (2007) Comparing models of debris-flow susceptibility in the alpine environment. Geomorphology 94:353–378. https://doi.org/10.1016/j.geomorph.2006.10.033
Casas MC, Codina B, Redano A, Lorente J (2004) A methodology to classify extreme rainfall events in the western mediterranean area. Theor Appl Climatol 77:139–150. https://doi.org/10.1007/s00704-003-0003-x
Chen C, Lin LL, Yu F, Lee C, Tseng TC, Wang AW, Kei-wai C (2007) Improving debris flow monitoring in Taiwan by using high-resolution rainfall products from QPESUMS. Nat Hazards 40:447–461. https://doi.org/10.1007/s11069-006-9004-2
Chevalier GG (2013) Assessing debris-flow hazard focusing on statistical morpho-fluvial susceptibility models and magnitude-frequency relationships: application to the Central-Eastern Pyrenees. TDX (Tesis Dr en Xarxa)
Chevalier G, Medina V, Hürlimann M, Bateman A (2013) Debris-flow susceptibility analysis using fluvio-morphological parameters: application to the Central-Eastern Pyrenees. Nat Hazards 67:213–238. DOI. https://doi.org/10.1007/s11069-013-0568-3
Ciurleo M, Calvello M, Cascini L (2016) Susceptibility zoning of shallow landslides in fine grained soils by statistical methods. Catena 139:250–264. https://doi.org/10.1016/j.catena.2015.12.017
Corominas C (2000) Landslides and climate. 8th Int Symp Landslides 1–33
Corominas J, Moya J, Hürlimann M (2002) Landslide rainfall triggers in the Spanish Eastern Pyrenees. In: 4th EGS Plinius Conference “Mediterranean storms”. Editrice, Mallorca, pp 1–4
Corral C, Velasco D, Forcadell D, Sempere-Torres D, Velasco E (2009) Advances in radar-based flood warning systems. The EHIMI system and the experience in the Besòs flash-flood pilot basin. Flood Risk Manag Res Pract Ext Abstr Vol 332 Pages Full Pap CDROM 1772 Pages 1295–1303
CREAF (2009) Mapa de Cobertes del Sòl de Catalunya (MSC-4), V4 edn
EEA (1990) CORINE land cover - contents. CORINE L Cover 1–163
Fawcett T (2006) An introduction to ROC analysis. Pattern Recogn Lett 27:861–874
Fell R, Corominas J, Bonnard C, Cascini L, Leroi E, Savage WZ, on behalf of the JTC-1 Joint Technical Committee on Landslides and Engineered Slopes (2008) Guidelines for landslide susceptibility, hazard and risk zoning for land use planning. Eng Geol 102:85–98
Froude MJ, Petley DN (2018) Global fatal landslide occurrence from 2004 to 2016. Nat Hazards Earth Syst Sci 18:2161–2181. https://doi.org/10.5194/nhess-18-2161-2018
Gallart F, Clotet N (1988) Some aspects of the geomorphic processes triggered by an extreme rainfall event: the November 1982 flood in Eastern Pyrenees. Catena Suppl 79–95
Gariano SL, Guzzetti F (2016) Landslides in a changing climate. Earth Sci Rev 162:227–252. https://doi.org/10.1016/j.earscirev.2016.08.011
Gariano SL, Petrucci O, Rianna G, Santini M, Guzzetti F (2018) Impacts of past and future land changes on landslides in Southern Italy. Reg Environ Chang 18:437–449. https://doi.org/10.1007/s10113-017-1210-9
Guzzetti F, Peruccacci S, Rossi M, Stark CP (2008) The rainfall intensity–duration control of shallow landslides and debris flows: an update. Landslides 5:3–17. https://doi.org/10.1007/s10346-007-0112-1
Hansen MJ (1984) Strategies for classification of landslides. In: Brunsden D (ed) Slope instability. John Wiley, Chichester, pp 1–25
Huat LT, Ali F, Osman AR, Rahman NA (2012) Web based real time monitoring system along North-South Expressway, Malaysia. Electron J Geotech Eng 17:623–632
Hürlimann M, Abancó C, Moya J, Vilajosana I (2014) Results and experiences gathered at the Rebaixader debris-flow monitoring site, Central Pyrenees, Spain. Landslides 11:939–953
Hürlimann M, Lantada N, Gonzalez M, Pinyol J (2016) Susceptibility assessment of rainfall-triggered flows and slides in the Central-Eastern Pyrenees. In: Aversa S, Cascini L, Picarelli L, Scavia C (eds) XII Int. symposium on landslides and engineered slopes. CRC, Naples, pp 1129–1136
Hürlimann M, Palau RM, Berenguer M, Pinyol J (2017) Analysis of the rainfall conditions inducing torrential activity in the Portainé catchment (Eastern Pyrenees, Spain). Geophys Res Abstr 19:12494
ICGC (2013) Model d’Elevacions del Terreny de Catalunya 5x5metres v1.0 (MET-5 v1.0). ICGC
Jakob M, Hungr O (2005) Debris flow hazards and related phenomena. Springer, Berlin
Kirschbaum D, Stanley T (2018) Satellite-based assessment of rainfall-triggered landslide hazard for situational awareness. Earth’s Future 6:505–523. https://doi.org/10.1002/2017EF000715
Kirschbaum D, Stanley T, Yatheendradas S (2016) Modeling landslide susceptibility over large regions with fuzzy overlay. Landslides 13:485–496. https://doi.org/10.1007/s10346-015-0577-2
Krøgli IK, Devoli G, Colleuille H, Boje S, Sund M, Engen IK (2018) The Norwegian forecasting and warning service for rainfall- and snowmelt-induced landslides. Nat Hazards Earth Syst Sci 18:1427–1450. https://doi.org/10.5194/nhess-18-1427-2018
Leopold P, Heiss G, Petschko H, Bell R, Glade T (2013) Susceptibility maps for landslides using different modelling approaches. Landslide Sci Pract 1:353–356. https://doi.org/10.1007/978-3-642-31325-7-46
Liao Z, Hong Y, Wang J, Fukuoka H, Sassa K, Karnawati D, Fathani F (2010) Prototyping an experimental early warning system for rainfall-induced landslides in Indonesia using satellite remote sensing and geospatial datasets. Landslides 7:317–324. https://doi.org/10.1007/s10346-010-0219-7
Liu C, Li W, Wu H, Lu P, Sang K, Sun W, Chen W, Hong Y, Li R (2013) Susceptibility evaluation and mapping of China’s landslides based on multi-source data. Nat Hazards 69:1477–1495. https://doi.org/10.1007/s11069-013-0759-y
Lloyd DM, Wilkinson PL, Othman AM, Anderson MG (2001) Predicting landslides: assessment of an automated rainfall based landslide warning system. In: Ho KKS, Li KS (eds) 14th South East Asia geotechnical conference. Balkema, Hong Kong, pp 135–139
Marra F, Nikolopoulos EI, Creutin JD, Borga M (2014) Radar rainfall estimation for the identification of debris-flow occurrence thresholds. J Hydrol 519:1607–1619. https://doi.org/10.1016/j.jhydrol.2014.09.039
Mendel JM (1995) Fuzzy logic systems for engineering: a tutorial. Proc IEEE 83:345–377. https://doi.org/10.1109/5.364485
Mira M, Ninyerola M, Batalla M, Pesquer L, Pons X (2017) Improving mean minimum and maximum month-to-month air temperature surfaces using satellite-derived land surface temperature. Remote Sens 9(12):1313
Mirus B, Morphew M, Smith J (2018) Developing hydro-meteorological thresholds for shallow landslide initiation and early warning. Water 10:1274. https://doi.org/10.3390/w10091274
Nadim F, Kjekstad O, Peduzzi P, Herold C, Jaedicke C (2006) Global landslide and avalanche hotspots. Landslides 3:159–173. https://doi.org/10.1007/s10346-006-0036-1
NOAA-USGS Debris Flow Task Force (2005) NOAA-USGS debris-flow warning system - final report
Osanai N, Shimizu T, Kuramoto K, Kojima S, Noro T (2010) Japanese early-warning for debris flows and slope failures using rainfall indices with radial basis function network. Landslides 7:325–338. https://doi.org/10.1007/s10346-010-0229-5
Palau RM, Hürlimann M, Pinyol J, Moya J, Victoriano A, Génova M, Puig-Polo C (2017) Recent debris flows in the Portainé catchment (Eastern Pyrenees, Spain): analysis of monitoring and field data focussing on the 2015 event. Landslides 14:1161–1170. https://doi.org/10.1007/s10346-017-0832-9
Pan HL, Jiang YJ, Wang J, Ou GQ (2018) Rainfall threshold calculation for debris flow early warning in areas with scarcity of data. Nat Hazards Earth Syst Sci 18:1395–1409. https://doi.org/10.5194/nhess-18-1395-2018
Papa MN, Medina V, Ciervo F, Bateman A (2013) Derivation of critical rainfall thresholds for shallow landslides as a tool for debris flow early warning systems. Hydrol Earth Syst Sci 17:4095–4107. https://doi.org/10.5194/hess-17-4095-2013
Persichillo MG, Bordoni M, Meisina C (2017) The role of land use changes in the distribution of shallow landslides. Sci Total Environ 574:924–937. https://doi.org/10.1016/j.scitotenv.2016.09.125
Piciullo L, Gariano SL, Melillo M, Brunetti MT, Peruccacci S, Guzzetti F, Calvello M (2017) Definition and performance of a threshold-based regional early warning model for rainfall-induced landslides. Landslides 14:995–1008. https://doi.org/10.1007/s10346-016-0750-2
Pisano L, Zumpano V, Malek, Rosskopf CM, Parise M (2017) Variations in the susceptibility to landslides, as a consequence of land cover changes: a look to the past, and another towards the future. Sci Total Environ 601–602:1147–1159. https://doi.org/10.1016/j.scitotenv.2017.05.231
Portilla Gamboa ME (2014) Reconstrucción y análisis de ocurrencias regionales de múltiples eventos de movimientos en masa generados por lluvias históricas en los Pirineos. Tesi Dr
Portilla M, Chevalier G, Hürlimann M (2010a) Description and analysis of major mass movements occurred during 2008 in the Eastern Pyrenees. Nat Hazards Earth Syst Sci 10:1635–1645. https://doi.org/10.5194/nhess-10-1635-2010
Raïmat Quintana C (2018) Dinámica y peligrosidad de las corrientes de derrubios : aplicación en el barranco de Erill, Pirineo catalán. TDX (Tesis Dr en Xarxa)
Rossi M, Luciani S, Valigi D, Kirschbaum D, Brunetti MT, Peruccacci S, Guzzetti F (2017) Statistical approaches for the definition of landslide rainfall thresholds and their uncertainty using rain gauge and satellite data. Geomorphology 285:16–27. https://doi.org/10.1016/j.geomorph.2017.02.001
Schmidt KM, Roering JJ, Stock JD, Dietrich WE, Montgomery DR, Schaub T (2002) The variability of root cohesion as an influence on shallow landslide susceptibility in the Oregon Coast Range. Can Geotech J 38:995–1024. https://doi.org/10.1139/cgj-38-5-995
Schwarz M, Preti F, Giadrossich F, Lehmann P, Or D (2010) Quantifying the role of vegetation in slope stability: a case study in Tuscany (Italy). Ecol Eng 36:285–291. https://doi.org/10.1016/j.ecoleng.2009.06.014
Segoni S, Rosi A, Fanti R, Gallucci A, Monni A, Casagli N (2018) A regional-scale landslide warning system based on 20 years of operational experience:1–17. https://doi.org/10.3390/w10101297
Shu H, Hürlimann M, Molowny-Horas R, González M, Pinyol J, Ma J (2019) Relation between land cover and landslide susceptibility in Val d’Aran, Pyrenees (Spain): historical aspects, present situation and forward prediction. Sci Total Environ 133557
Strahler AN (1957) Quantitative analysis of watershed geomorphology. EOS Trans Am Geophys Union 38:913–920. https://doi.org/10.1029/tr038i006p00913
UNISDR (2015) Sendai framework for disaster risk reduction. In: Third United Nations world conference on disaster risk reduction. pp 1–25
Wilde M, Günther A, Reichenbach P, Malet J-P, Hervás J (2018) Pan-European landslide susceptibility mapping: ELSUS version 2. J Maps 14:97–104. https://doi.org/10.1080/17445647.2018.1432511
Yin K, Chen L, Zhang G (2008) Regional landslide hazard warning and risk assessment. Earth Sci Front 14:85–93. https://doi.org/10.1016/s1872-5791(08)60005-6
Zawadzki I (1984) Factors affecting the precision of radar measurements of rain. In: 22nd conference on radar meteorology. American Meteorological Society, Zurich, pp 251–256
Acknowledgments
The authors acknowledge the Meteorological Service of Catalonia (SMC) for providing the radar data.
Funding
This work has been partially funded by the EC H2020 project ANYWHERE (DRS-01-2015-700099) and the Spanish project SMuCPhy (BIA 2015-67500-R). Also, the first author is supported by a grant from the Secretariat of Universities and Research of the Ministry of Business and Knowledge of the Generalitat de Catalunya.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Palau, R.M., Hürlimann, M., Berenguer, M. et al. Influence of the mapping unit for regional landslide early warning systems: comparison between pixels and polygons in Catalonia (NE Spain). Landslides 17, 2067–2083 (2020). https://doi.org/10.1007/s10346-020-01425-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10346-020-01425-3