
Abstract
Early Warning Systems (EWS) are efficient tools for preventing and mitigating the risks associated to landslides occurrence. In this paper, an integrated methodology for landslides’ analysis is presented and described. Such methodology is aimed at the creation of early warning systems and is based on the integration between a modern monitoring technique, such as the Ground-Based Interferometric Synthetic Aperture Radar (GBInSAR), along with advanced numerical modelling. The paper also shows the application of the proposed methodology to the case study of a rockslide in central Italy. The integration between monitoring data, thanks to a GBInSAR survey and advanced numerical simulations with the combined Finite-Discrete Elements Method (FDEM), allowed for the definition of a set of surface velocity thresholds to be adopted for the long-term monitoring of the landslide and for the creation of an effective EWS.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
The global climatic changes and the continuing increase in the land use are causing a remarkable increase of the frequency and the intensity of landslides. Damages to properties, production systems and infrastructures, as well as the loss of human lives caused by slope failures, has increased accordingly. As a consequence, the necessity to improve the strategies for landslides’ analysis and risk mitigation has become more and more important. Early Warning Systems (EWS) are nowadays a valid alternative for landslide management (Popescu 2002). According to the definition of the United Nations International Strategy for Disaster Reduction (United Nations International Strategy for Disaster Reduction UNISDR 2009), an early warning system is defined as “the set of capacities needed to generate and disseminate timely and meaningful warning information to enable individuals, communities and organizations threatened by a hazard to prepare and to act appropriately and in sufficient time to reduce the possibility of harm or loss.” This is a general definition that can be applicable to any hazard and does not contain any direct reference to landslides. Whatever the definition and the hazard considered, EWSs are used to mitigate risk by acting on the exposure reduction of the elements at risk. The main concept beyond every landslide EWSs is to keep such elements at risk, especially people, away from the dangerous area with a sufficient lead-time in case of expectation of an imminent collapse. An efficient and effective EWS should therefore comprise four main sets of actions (Di Biagio and Kjekstad 2007):
-
Monitoring activities, i.e. data acquisition, transmission and maintenance of the instruments;
-
Analysis and modelling of the phenomenon;
-
Warning, i.e. the dissemination of simple and understandable information to the exposed elements;
-
Effective response of the elements exposed to risk and risk’s knowledge.
The key to a successful EWS lies in the ability to identify and measure in real time limited but significant indicators, called precursors, which precede a landslide catastrophic failure. Recent advances in the development of monitoring instrumentation (e.g. radar interferometry, both space-borne or ground-based, LiDAR, total station, GPS and photogrammetric techniques) has increased the potential to obtain high reliable measurements of different quantities which can be subsequently adopted to detect the activity preceding a slope failure (Teza et al 2007; Monserrat and Crosetto 2008; Abellán et al. 2009; Barla et al. 2010a, 2013; Casagli et al. 2010; Barla and Antolini 2012; Intrieri et al. 2012; Antolini 2014).
For rock landslides, the use of surface displacements recorded over time, which are then analyzed in order to highlight acceleration/deceleration phases, is able to provide useful information about the activity of the slope and its possible time of failure (Crosta and Agliardi 2003). Such measurements are commonly used as a form of EWSs and may cover a variety of scales from that of a crackmeter spanning an open tension crack to a system of geodetic measuring points covering an entire slope (Eberarhardt 2006). A careful examination of the velocity and displacement vectors and their variation in time and space therefore provides a valuable insight into the mechanism of failure of a landslide (Hoek and Bray 1981).
It is indeed clear that whenever the mechanics and the mechanism of the instability are ignored, it can be difficult or simply impossible to rely solely on the analysis based on the measure of surface displacements and velocities. Further rock landslides precursors have been therefore used in literature for early warning purposes. Among them, it is worth mentioning the acoustic emissions count rate, which can be related to the generation and the propagation of fractures inside rock masses (Dixon and Spriggs 2007), and the displacement measured at depth, inside the landslide body, by means of inclinometers or Time Domain Reflectometry (Mikkelsen 1996; O’Connor and Dowding 2000).
Since EWSs are time-sensitive or stochastic in their components, it is necessary to develop a design methodology that defines the integration of the monitoring information sources, the identification of potential warning thresholds and the assessment of the associated risk within an explicit causal analysis. Since both the relevant precursor and the exposed elements may vary depending on the type of landslide and its location (urban, rural or mountainous areas), every EWS may be designed in details for each specific site.
In this paper, a new integrated methodology for landslides’ analysis based on the use of Ground-Based Interferometric Synthetic Aperture Radar (GBInSAR) and the combined Finite-Discrete Element Method (FDEM) numerical modelling is presented. This EWS is based on real-time monitoring of the landslides surface displacements and velocities and on realistic numerical prediction of their behaviour which are both provided by the use of the two mentioned techniques. An example of the application of the proposed methodology to the Torgiovannetto di Assisi rockslide in central Italy is also described.
The proposed integrated methodology
The proposed integrated methodology consists of four main components, called “modules,” as shown in the flow chart of Fig. 1. Each module carries out specific functions. Surface displacements and velocities are here selected as precursors, even though the architecture of the methodology was designed to be compatible with a wide range of precursors, to be used for different types of landslides.

Flow chart of the integrated methodology for early warning systems of rock landslides
The four main elements of the methodology are the following:
-
1.
Radar monitoring module;
-
2.
Conventional monitoring module;
-
3.
Characterization and modelling module;
-
4.
Verification module.
Modules 1 to 3 are the source of input data for the decisional algorithm of the process (i.e. the orange dashed box at the bottom of the flow chart). The algorithm allows for the continuous assessment of the warning levels and determines the respective actions to be undertaken in order to assure the adequate level of safety for the elements exposed to risk.
Figure 1 also shows a time scale (t 0, t 1, t 2 and t 3) that should be intended as follows:
-
t 0: can be considered the initial reference time. For a first-time failure, this is the time of landslide occurrence while, for a dormant or potential landslide, this represents the time of reactivation;
-
t 1: from the time immediately next to t 0 to approximately the following 3 days;
-
t 2: from 3 to approximately 20 days following t 0;
-
t 3: more than 20 days from t 0.
Module 1 (radar monitoring) is the first to be started and can lead to the set-up of an EWS in t 1 time when critical conditions call for an immediate activation of a warning system. The modules 2 and 3 (conventional monitoring and characterization/modelling) can start simultaneously but necessarily need longer time to provide outputs useful to optimize the EWS. Despite the fact that the three analysis modules are parallel, some of the phases are in fact closely related to each other as will be described later. A further detailed description of each module is given in the following.
Radar monitoring module
Given a generic rock slope (natural or engineered) affected by an instability activated as a first-time failure, reactivated after a dormant phase or just showing morphological evidences of instability, the first step in the proposed methodology is the installation of a GBInSAR system. The capabilities of radar to measure the displacement and velocity field with a millimetric accuracy over the entire slope (or an open pit mine face), near real time with an acquisition frequency of a few minutes and in almost any weather conditions without the need to install any contact sensor on the slope, make this tool unique among all slope monitoring systems (Pieraccini et al. 2003; Atzeni et al. 2015). These features allow for obtaining displacement and velocity maps of the monitored scenario few hours after the system installation (t 1).
After the installation of a GBInSAR system, it is possible to obtain a nearly continuous displacement field of the observed area in less than 1 h, if the processing implies the estimation of the displacement only from the interferograms, or in less than 4 h, if a Persistent Scatterers (PS) processing technique (Ferretti et al. 2001) is adopted. The possibility to obtain a displacement map updated every 10 min or less fully satisfies the requirements for a real time monitoring system and especially during emergency conditions represents an important added value to the monitoring system.
The installation of the GBInSAR can be achieved by the construction of a specific concrete basement, recommended for long-term surveys, or by a rapid installation and repositioning system, consisting of portable concrete blocks equipped with support rods, for short time or emergency installations, as shown in Fig. 2. The radar system can also be equipped with photovoltaic modules in addition to the pre-existing batteries package. With this configuration and given the sufficient solar radiation conditions, the radar system can operate in a stand-alone working modality nearly continuously.

Example of GBInSAR installation systems: concrete base (a); rapid installation and repositioning system (b)
The software GRAPeS (Aresys 2007) is used for data processing based on the PS technique. It was optimized for real-time monitoring purposes, by means of a separation of the different processing phases between the local machine (called transmitting section—TX) and the remote one (called receiving section—RX), as shown in Table 1. For each radar image acquired, data are automatically processed in order to obtain the real time updated displacement map of the monitored scenario. On the TX section, the raw SAR images are focused, the PS are selected and extracted from each focused image. The PS information is subsequently transferred via FTP to a remote machine where the processing is completed. Therefore, by adding the last updated displacement and velocity map, it is possible to reconstruct the time history of every selected pixel along the slope. This can be done using either a fixed master image as a reference (incremental methods) or changing it for each subsequent image pairs (rolling method) or combining the two approaches in order to obtain a maximum redundancy pattern. At the end of processing, the maps are automatically saved and converted in the appropriate format to be used in the decisional algorithm.
Conventional monitoring module
Within the conventional monitoring module are all the operations connected to the installation, data acquisition and processing of the in situ geotechnical instrumentation (piezometers, inclinometers, extensometers, crack meters, etc.) and of further remote sensing equipment which can be adopted for landslide monitoring (i.e. terrestrial laser scanner, total stations, photogrammetric techniques, etc.).
When dealing with a first-time failure, the data availability from in situ instrumentation is highly influenced by the time required for the installation of the monitoring network, which in general is time-demanding and labour intensive. The conventional monitoring approaches require access to the landslide site for initial evaluation and planning, a careful selection of the proper monitoring equipment and of the location of each measurement point. The installation of in situ instrumentation also implies the necessity for personnel and machinery to access and work in hazardous areas for the installation of benchmarks or the construction of monuments. Hence, the accessibility of the site in safety conditions is a limiting factor that can often lead to further delays and difficulties in the installation of the monitoring system.
Given all these time constraints, the data availability of conventional monitoring module is in general differed by some days or weeks (t 2) from the occurrence of a first-time failure. It is worth mentioning that in the case of the reactivation of a pre-existing landslide, the in situ instrumentation is supposed to be already installed and operative. If the instruments are equipped with real time capable sensors and the data analysis procedures are efficient, it is possible to obtain a noticeably reduction of the time needed to reach the decisional core of the algorithm.
Geotechnical characterization and modelling module
The geotechnical characterization and modelling module includes in situ investigations, field surveys (geological, geomorphological, structural, geophysical), laboratory tests on intact rock and discontinuities and the activities concerning numerical modelling to study the triggering conditions and the evolution scenarios of a landslide. All these activities are typically time-demanding and, within the proposed methodology, are carried out from 1 week to few months (t 2–t 3) after the landslide occurrence.
The time spent to perform field surveys and in situ investigations is in general proportional to the detail level to be achieved. Field surveys and in situ tests can start within few days or weeks from the occurrence of the instability (t 1) but a major time is needed in order to obtain reliable results to be used in the next steps (t 2).
Geotechnical laboratory tests also need medium to long time to provide geomechanical parameters for the numerical modelling. Laboratory testing however is the fundamental step for the quantitative characterization of the intact rock and discontinuity properties, which provides all the necessary input parameters for the subsequent numerical modelling activities. The selection of the necessary tests to be carried out is made on the basis of the characteristic of the materials involved and the recognized mechanism driving the instability (Barla et al. 2010b, c).
Once the characterization of both the intact rock and the discontinuities is completed, modelling of the slope instability can start (t 3). Since the analysis of landslides often involves complexities related to geometry or topography, material anisotropy, non-linear behaviour, in situ stresses and the presence of coupled processes (e.g. hydro-mechanical behaviour), numerical models represent the only solution to be employed to properly take into account all these interactions. The combined FDEM is here adopted for numerical modelling (Munjiza et al. 1995; Munjiza 2004; Barla et al. 2011; Piovano et al. 2011, 2013). By using the FDEM, it is possible to investigate brittle failures of slopes from initiation through transportation and deposition. Alternative numerical methods, such as FEM, FDM or DEM, can however be used within this module.
The back analysis process, based on monitoring data derived from the GBInSAR, as well as from conventional monitoring methods, along with a continuous calibration of the numerical and mechanical parameters, allows for modelling results to be used, with increased confidence, in landside scenario analysis for early warning purposes. The results of the numerical modelling can therefore provide a prediction on the landslide kinetic energy, on the displacement and velocity of the moving mass and on its depth and final deposition.
Verification module
The last section is the verification module, which represents the decisional algorithm of the integrated methodology. It represents the set of operations needed to determine continuously and in real time the warning levels related to the instability phenomenon monitored using the data coming from at least one of the analysis modules previously described. The decisional module can be reached in a time variable from t 1 (few hours after the landslide occurrence) to t 3 (few weeks), depending on the particular combination of analysis modules chosen. In this sense, it does not present any particular time constraint.
The results of the GBInSAR and the conventional monitoring modules concur to the definition of the landslide’s kinematics and the consequent interpretation of the landslide displacement patterns. For complex landslides, different areas can be characterized by different types of movements, velocities, volumes and can exhibit different short and long-term behaviour as a consequence of the influence of different triggering factors (e.g. rainfalls). This is accounted for by introducing the concepts of “Region of Interest” (ROI). The ROIs are hence portions of a landslide characterized by a homogeneous kinematic behaviour (i.e. type of motion, direction, displacement and velocity) and a certain degree of activity.
After the definition of ROIs, the next step in the algorithm is the selection of thresholds values to be used in the decisional algorithm. The general criteria for an adequate thresholds selection include the need to anticipate the evolution scenario (or the modes of failures) as well as the time needed for the responses. In the proposed methodology, and given all the time constraints of the integrated methodology, when dealing with a first-time failure and in absence of a conventional monitoring network, the verification module is reached only through the radar module at time t 1. As a consequence, the thresholds will be markedly conservative and will be selected by an expertise judgment approach. As the first GBInSAR monitored data become available, it is possible to analyze the time series of the different points to progressively optimize the thresholds previously selected. This improvement at time t 2 (from days to some weeks after the landslide occurrence) can also be promoted by the availability of other conventional monitoring data. Further and more reliable optimization of the thresholds, to be adopted for the long-term monitoring of the landslide, occurs at time t 3 on the basis of the results of the modelling module.
A typical set of three warning levels (WL1–WL3) is used in the proposed methodology and consequently a two-threshold system (attention and alarm) is adopted (Table 2). Each warning level is then associated to a state of activity of the landslide (normal or seasonal activity, increased activity, possible collapse) and is triggered by exceeding the relative threshold. For each level, a set of responses are given which indicates what mitigation actions should be engaged (i.e. “what to do” and “who is in charge”). A comprehensive discussion of the specific actions is far beyond the scope of this paper as should take into account social, economical, political aspects that can only come from specific multi-disciplinary risk assessment studies (Corominas et al. 2005; Dai et al. 2002; Einstein et al. 2010; Fell 1994; Fell and Hartford 1997; Fell et al. 2008; Uzielli et al. 2008).
In the proposed scheme, the responses associated to each warning level have also a feedback loop to the monitoring modules. When the attention level is reached, the frequency of measurements is increased until, in alarm conditions, the maximum frequency is attained and a continuous surveillance is guaranteed.
Once the warning levels and the respective thresholds have been defined, the verification module simply concerns the continuous comparison of the real time measurement of the selected quantities over the ROIs with the pre-defined threshold values.
To this extent, the new software Early Warning using Synthetic Aperture Radar (EWuSAR) was specifically developed at the Politecnico di Torino (Barla et al. 2014). The software is capable to analyze continuously and in real time the displacement and velocity maps generated by the GBInSAR processing and to provide real time warning levels maps of the monitored landslide.
An example of the application of the methodology to a rock landslide
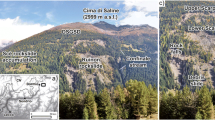
In the following chapter, an example of the application of the methodology to the Torgiovannetto rockslide in central Italy will be described. The rockslide developed in a depleted limestone quarry site and is widely described in literature (Scuola di Alta Specializzazione e Centro Studi per la Manutenzione e la Conservazione dei Centri Storici in Territori Instabili 2006; Balducci et al. 2011; Brocca et al. 2012; Casagli et al. 2008; Gigli et al. 2007; Graziani et al. 2009, 2012; Intrieri et al. 2012; Salciarini et al. 2009). The instability affects the whole quarry at different scales but the main problem is related to the stability conditions of a large rock wedge in the upper part of the quarry (Fig. 3) with an estimated volume of about 182,000 m3 (Canuti et al. 2006).

Picture of the Torgiovannetto rockslide. The 182,000 m3 rock wedge is highlighted
GBInSAR and conventional monitoring
The IBIS-L GBInSAR system was installed on January 31th 2013 at an elevation of about 530 m a.s.l. on the W portion of the Torgiovannetto quarry pit. The selected location, at a mean distance of 50 m from the base of the quarry face and at a distance of 200 m from the centre of the unstable rock wedge, assured a frontal vision of the monitored scenario with a Line Of Sight (LOS) approximately parallel to the direction of the landslides’ displacement vectors. The rapid installation and repositioning system was used. The instrumental parameters adopted for the survey are shown in Table 3. The system worked continuously up to March 11th when it was definitely dismantled from the site. A total of 1,999 SAR images were acquired with a frequency equal to one image every 30 min. The SAR images were processed with TX-RX GRAPeS based on the PS technique, and the real time operation was tested.
In Figs. 4 and 5, the cumulated displacement and velocity maps, obtained by the GBInSAR survey, georeferenced and projected over a Digital Elevation Model of the quarry, are shown. In the same figures, the main open fractures and tension cracks mapped on the quarry face are also indicated. The result clearly highlights the unstable rock wedge as the main area affected by movements. Further limited areas affected by movements at the base of benches I and II are related to the presence of loose debris lying on the bedrock. The analysis of the maps reveals that the displacement and velocity patterns across the quarry are not uniform. The displacement (and thus the velocities) increases proceeding respectively from W to E and from S to N. The time series of 11 representative points, selected across the unstable area, are shown in Fig. 6. The time series of the selected points do not show a uniform behaviour:

Cumulated displacement map from 31/01/2013 to 11/03/2013 obtained by the GBInSAR monitoring survey projected over a Digital Elevation Model of the Torgiovannetto quarry

Regions Of Interest (ROIs) identified in the Torgiovannetto quarry and GBInSAR velocities measured from 31/01/2013 to 11/03/2013

Cumulated displacement (red) and velocity (blue) GBInSAR time series of points located on the different ROIs identified. Points location is shown in Fig. 5. The black arrows indicate the acceleration phases while the black dotted line indicates the mean velocity value
-
The points located respectively on the SE and SW corner of the wedge (D074, CAFE, W5 and W6) are characterized by nearly constant velocity, without evident accelerations phases;
-
The points in the central upper portion of the unstable wedge (W2, W3 and W4) are characterized by two less pronounced acceleration phases recorded at the beginning of February and during the first week of March 2013;
-
D1F4, W7 and W8 points located on the central-lower area of the unstable wedge revealed three well-evident acceleration phases. The accelerations become more evident proceeding towards the northern portion of the wedge.
Based on the above, four ROIs were identified in the area affected by the instability (Fig. 5):
-
ROI 1 corresponds to the lower sector of the unstable wedge and is completely separated from the ROI 2 by a set of open tension cracks developed along the benches IIa and IIb.
-
ROI 2 is bounded respectively by the basal sliding plane and the persistent open fracture that departs from the W wedge boundary fracture and runs in E-W direction along the bench III, separating it upward from ROIs 3 and 4.
-
ROI 3 corresponds to the SW wedge sector (i.e. the W portion of the bench III) along with a narrow region comprised between the benches IIa and III which is bounded by two open fractures. The E boundary of ROI 3 was instead less defined and a progressive transition towards the ROI 4 was recognized. The transition zone corresponds to the creek incision just in the middle of the unstable wedge.
-
ROI 4 occupies the SE sector of the unstable wedge and it is bounded towards S by the main open tension crack, to the E by the Fosso della Maestà creek and towards N by the main tension crack.
The presence of these different landslides sectors highlight that, even though the general landslide kinematics can be assumed as a planar sliding of a rock wedge along a weak clayey-marly level, a more complex deformational pattern, characterized by differential movements, is superimposed to the general sliding movement. The kinematics of the four ROIs appears to be strictly influenced by the presence of major lateral constraints that determine planar sliding conditions coupled with rotations. In particular, the ROI 1 is characterized by a major variability of the GBInSAR velocity pattern, with a mean velocity value being equal to −0.46 mm/day. This sector progressively slides downward, causing a 1.5 m lowering of the bench IIa from the surrounding rock mass. As previously mentioned, the displacement rate of ROI 1 shows short-term accelerations following rainfalls (Fig. 6), also favoured by the opening of the transversal tension crack separating ROI 1 from the rest of the unstable mass.
ROI 2 and ROI 3 are characterized by different mean velocities, slower for ROI 3 (−0.38 mm/day) and higher for ROI 2 (−0.49 mm/day). The displacement on ROI 2 progressively decreases from E to W as a consequence of the shear resistance given by the western landslide boundary. Its kinematic can be hence described by a planar sliding associated to a counter clockwise rotation. ROI 3 is characterized by a more homogeneous velocity pattern with the slowest mean velocity measured on the whole landslide. Its kinematic behaviour is mainly controlled by the shear resistance given by the western boundary and by the increasing thickness of the unstable mass. The open tension crack, which bounds ROI 3 to the N, indicates a rigid planar sliding of the rock mass.
Finally, ROI 4 is characterized by a mean velocity of −0.54 mm/day. The main tension crack to the N, which is up to 2 m wide along the ROI 3 boundary, progressively closes within the ROI 4 but simultaneously showing a difference in height up to 1.5 m (Fig. 7).

Perimetric tension fracture of the 180,000 m3 rock wedge along ROI 3 – E sector (a) and along ROI 4 - W sector (b)
The acceleration phases detected by the radar monitoring (Fig. 6) can be directly related to rainfalls occurrence recorded during the monitoring period. Two main processes may occur:
-
a progressive saturation of the sub-vertical fractures and open tension cracks;
-
a progressive increase of the pore pressure inside the marly-clayey filling along the basal sliding surface.
The first process is rapid and concurrent with rainfalls because of the very high permeability of the sub-vertical fractures and open cracks. The pore pressure increase on the sliding surface is instead a slower process, due to low permeability of the marly-clayey filling, and can be correlated to the seasonal accelerations of the landslide (Graziani et al. 2012; Intrieri et al. 2012).
As shown in Fig. 6, the acceleration phases were mostly detected on points located on ROIs 1 and 2. Accelerations occurred in the 12–24 h following the onset of rainfalls (Fig. 8) and can therefore be related to the rapid saturation of open tension cracks that occurs more likely in these areas characterized by smaller rock mass volumes.

Cumulated daily rainfalls, extensometer data and GBInSAR time series of three points located on the lower portion of the 182,000 m3 unstable wedge
The occurrence of accelerations following rainfalls on ROI 1 was also confirmed by the increase in the crack aperture measured by the bar extensometers D1F4 of a new Wireless Sensor Network installed at the beginning of 2013 (Fig. 8).
Characterization and modelling for the set-up of the early warning system
As required by the characterization and modelling module, the geomechanical characterization of the site took place involving site mapping, geotechnical laboratory tests on intact rock specimens and on discontinuities. A set of standard laboratory tests, including unconfined, triaxial and indirect tensile strength tests were carried out (Antolini 2014). These tests, along with available data (Graziani et al. 2009, 2012), allowed for the geotechnical characterization of the Maiolica limestone. The results of undrained triaxial tests, direct and ring shear tests were available for the mechanical characterization of the marly-clayey filling (Graziani et al. 2012).
The work allowed defining the complete geological and geotechnical models for the landslide. Subsequently, an extensive two dimensional (2D) numerical modelling process was undertaken by using the FDEM. This included back analysis of a bench collapse occurred in December 2005 as well as scenario based analysis for the instability of the 182,000 m3 rock wedge. Despite the different scale of the failures (some hundreds of m3 for the December 2005 failure), the geometries were very similar. Thus, back analyzing the small-scale collapse for which information on triggering and runout were known (Casagli et al. 2006), it was possible to validate the mechanical parameters and to calibrate the numerical parameters to be adopted for the simulation of the 182,000 m3 rock wedge collapse. The characterization and modelling work is described in details in Antolini (2014) and Antolini and Barla (2014).
The FDEM numerical model of the scenario analysis was built to reproduce the slope geometry, by explicitly including in the model the pre-existing discontinuities, the presence of the sliding surface, represented by a persistent bedding plane with a marly-clayey filling, and the tension crack. A large-scale undulation along the main sliding plane was already known in literature (Graziani et al. 2012) and was confirmed by the measured variations of the dip direction and the inclination of the bedding planes. For this reason, the basal sliding plane was reproduced with a large-scale roughness profile characterized by an undulation length λ = 5 m and an undulation angle of α = 5.25°. The geometry and the mesh of the numerical model are shown in Fig. 9a.

FDEM triggering model of the 182,000 m3 rock wedge (a); total velocity computed by the FDEM simulations on W1 point (ROI 2) for different undulation angles (α) of the sliding surface (b)
Two different triggering mechanisms were considered: the progressive saturation of the joints induced by prolonged rainfalls and the decrease of shear strength on the basal sliding plane due to pore pressure increase. The first mechanism was simulated by applying a water pressure in the tension crack, the second by modifying the undulation of the plane (i.e. affecting its shear strength) as the FDEM software used does not allow to explicitly include groundwater in the computation.
The results of the numerical analyses allowed computing the velocities for each ROI during triggering and evolution of the rockslide. As an example, Fig. 9b shows a bi-logarithmic plot of the total velocity computed for the W1 point located on ROI 2, when different saturation conditions are simulated to trigger the instability. It is shown that for a specific value of the undulation angle α equal to 5.25°, corresponding to a specific saturation conditions on the basal sliding surface, the velocity of the W1 point increases exponentially. This is associated to the collapse of the rock wedge as shown in the same figure by the two screenshots of the model taken while stepping. On the contrary for lower undulation angles, i.e. less burdensome saturation conditions, the velocity progressively drops to zero and the rock wedge, after an initial displacement, finds a new equilibrium condition.
Similar results have been obtained by varying the water pressure inside the tension crack.
Analyzing these data, a velocity value equal to 26.4 mm/day can be derived. Such value represents a critical velocity threshold for the stability of the ROI 2 area: for velocities slightly greater than 26.4 mm/day, the FDEM simulations show that the rock block collapses. The attention and the alarm thresholds for the ROI 2 of the Torgiovannetto quarry can be therefore defined taking into account this critical velocity value as the limit for the slope stability conditions.
A similar analysis was carried out for the other ROIs, taking into account the velocities measured on corresponding points. By applying a “safety factor” to these critical velocities, it is then possible to define the attention and the alarm levels for the different ROIs to be adopted in the EWS. The safety factor is here defined as the ratio between the critical velocity computed from the numerical analysis and the threshold adopted for the EWS. This allows for a conservative approach to be adopted in order to consider the limitations introduced by the 2D simulation of a three dimensional problem. A safety factor equal to 3 was chosen for the alarm threshold while the attention threshold was set as half of the alarm level. The thresholds values for the different ROIs are shown in Table 4 .
Figure 10 shows the velocities measured by the GBInSAR during the 39 days monitoring period (31/01/2013–11/03/2013) compared to the attention and alarm levels for the four ROIs. During the monitoring period, neither the attention nor the alarm thresholds were reached or exceeded for ROI 1 and 2, while the attention level was exceeded one time on ROI 3 and two times on ROI 4 during the first week of monitoring.

Alarm and attention thresholds defined based on the FDEM simulations vs. GBInSAR velocities measured on the representative points of the ROI 1 (a), ROI 2 (b), ROI 3 (c) and ROI 4 (d)
Conclusions
On the basis of the work performed so far, it is possible to draw the following conclusions:
-
Monitoring and modelling of rock landslides are often considered two distinct activities; however, they need to be integrated to improve early warning procedures.
-
A novel contribution to the set-up of a cost-effective EWS for large rock landslides is illustrated. This was obtained through the combination of innovative remote sensing techniques (i.e. GBInSAR) with advanced numerical modelling (i.e. FDEM). The methodology can be effectively used in the analysis and the management of rock landslides.
-
The velocity maps obtained by GBInSAR monitoring can be immediately used to provide a first warning scheme. Later, geotechnical characterization of the site and numerical modelling allow for realistic evolution scenarios to be obtained and improve thresholds and warning procedures.
-
The integrated methodology was tested and proved to be effective when managing the rock landslide of Torgiovannetto di Assisi. Attention and alarm thresholds were defined and applied to set up an EWS at the experimental site.
References
Abellán A, Jaboyedoff M, Oppikofer T, Vilaplana JM (2009) Detection of millimetric deformation using a terrestrial laser scanner: experiment and application to a rockfall event. Nat Hazards Earth Syst Sci 9:365–372
Scuola di Alta Specializzazione e Centro Studi per la Manutenzione e la Conservazione dei Centri Storici in Territori Instabili (2006) Studio del Fenomeno Franoso in essere in località Tor Giovannetto di Assisi (PG) ed individuazione degli interventi volti alla riduzione del rischio idrogeologico - Relazione Finale ed Integrazioni Alla Relazione Finale. Unpublished report. In Italian
Antolini F (2014) The use of radar interferometry and finite-discrete modelling for the analysis of rock landslides. PhD Thesis, Politecnico di Torino, 273 pp
Antolini F, Barla M, (2014) Combining finite-discrete numerical modelling and radar interferometry for rock landslide early warning systems. Proceedings of XII IAEG Congress, Torino, 15-19 September 2014, Vol. 6 Applied Geology for Major Engineering Projects, 705-708
Aresys 2007 GRAPeS software for IBIS-L, v. 2.7
Atzeni C, Barla M, Pieraccini M, Antolini F (2015) Early warning monitoring of natural and engineered slopes with ground-based synthetic aperture radar. Rock Mech Rock Eng 48:235–246. doi:10.1007/s00603-014-0554-4
Balducci M, Regni R, Buttiglia S, Piccioni R, Venanti LD, Casagli N, Gigli G (2011) Design and built of a ground reinforced embankment for the protection of a provincial road (Assisi, Italy) against rockslide. Proc. XXIV Conv. Naz. Geotecnica, AGI, Napoli, 22th-24th June 2011
Barla M, Antolini F (2012) Integrazione tra monitoraggio e modellazione delle grandi frane in roccia nell’ottica dell’allertamento rapido. In: Barla G, Barla M, Ferrero A, Rotonda T (eds) Nuovi metodi di indagine e modellazione degli ammassi rocciosi, MIR 2010, Torino 30th November – 1st December 2010. Pàtron, Bologna, pp 211–229, In Italian
Barla G, Antolini F, Barla M, Mensi E, Piovano G (2010a) Monitoring of the Beauregard landslide (Aosta Valley, Italy) using advanced and conventional techniques”. Eng Geol 116:218–235
Barla G, Barla M, Martinotti M (2010b) Development of a new direct shear testing apparatus. Rock Mech Rock Eng 43:117–122
Barla G, Barla M, Debernardi D (2010c) New triaxial apparatus for rocks. Rock Mech Rock Eng 43:225–230
Barla M, Piovano G, Grasselli G (2011) Rock slide simulation with the combined finite discrete element method. International Journal of Geomechanics 12 (6). DOI: 10.1061/(ASCE)GM.1943-5622.0000204
Barla G, Antolini F, Barla M, Perino A (2013) Key aspects in 2D and 3D modeling for stability assessment of a high rock slope. In: Workshops ‘Failure Prediction’ 2013, Austrian Society for Geomechanics, Salzburg, 9th October 2013
Barla M, Antolini F, Dao S (2014) Il monitoraggio delle frane in tempo reale. Strade e Autostrade 107:154–157
Brocca L, Ponziani F, Moramarco T, Melone F, Berni N, Wagner W (2012) Improving landslide forecasting using ASCAT-derived soil moisture data: a case study of the torgiovannetto landslide in Central Italy. Rem Sens 2012(4):1232–1244
Canuti P, Casagli N, Gigli G (2006) Il modello geologico nelle interazioni fra movimenti di massa, infrastrutture e centri abitati. In: Barla G, Barla M (eds) Instabilità di versante, interazioni con le infrastrutture i centri abitati e l'ambiente, MIR 2006, Torino, 28th-29th November 2006. Pàtron, Bologna, pp 41–61, In Italian
Casagli N, Gigli G, Lombardi L, Nocentini M, Papini M (2006) “Valutazione delle distanze di propagazione relative ai fenomeni franosi presenti sul fronte della cava di Torgiovannetto (PG) – Relazione 2.0”. Dipartimento di Scienze della Terra, Università degli Studi di Firenze, unpublished report, 74 pp., in Italian
Casagli N, Gigli G, Lombardi L, Mattiangeli L, Nocentini M, Vannocci P (2008) “Indagini geofisiche e geotecniche e modellazione dinamica della frana di Torgiovannetto (PG) - Rapporto Finale”. Dipartimento di Scienze della Terra, Università degli Studi di Firenze. Unpublished report, 87 pp. In Italian
Casagli N, Catani F, Del Ventisette C, Luzi G (2010) Monitoring, prediction, and early warning using ground-based radar interferometry. Landslides 7(3):291–301
Corominas J, Copons R, Moya J, Vilaplana J, Altimir J, Amigo J (2005) Quantitative assessment of the residual risk in a rock-fall protected area. Landslides 2:343–357
Crosta G, Agliardi F (2003) Failure forecast for large rock slides by surface displacement measurements. Can Geotech J 40(1):176–191
Dai FC, Lee CF, Ngai YY (2002) Landslide risk assessment and management: an overview. Eng Geol 64:65–87
Di Biagio E, Kjekstad O (2007) Early Warning, Instrumentation and Monitoring Landslides. 2nd Regional Training Course, RECLAIM II, 29th January - 3rd February 2007
Dixon N, Spriggs M (2007) Quantification of slope displacement rates using acoustic emission monitoring. Can Geotech J 44(8):966–976
Eberarhardt E (2006) From cause to effect: using numerical modeling to understand rock slope instability mechanisms. In
Einstein HH, Sousa R, Karam I, Manzella I, Kveldsvik V (2010) Rock slopes from mechanics to decision making. In: Zhao J, Labiouse V, Dudt J-P, Mathier J-F (eds) Chapter 1 - rock mechanics in civil and environmental engineering. CRC Press, London, pp 3–13
Fell R (1994) Landslide risk assessment and acceptable risk. Can Geotech J 31:261–272
Fell R, Hartford D (1997) Landslide risk management. In: Cruden D, Fell R (eds) Landslide risk assessment. Balkema, Rotterdam, pp 51–109
Fell R, Corominas J, Bonnard C, Cascini L, Leroi E, Savage W (2008) Guidelines for landslide susceptibility, hazard and risk zoning for land use planning. Eng Geol 102:85–98
Ferretti A, Prati C, Rocca F (2001) Permanent scatterers in SAR interferometry”. IEEE Trans Geosci Rem Sens 39(1):8–20
Gigli G, Casagli N, Lombardi L, Nocentini M (2007) “Magnitude estimation and runout analyses of a rockslide in the Torgiovannetto quarry (PG)”. EGU 2007 – Geoph. Res. Abs., 9, 08399, 2007
Graziani A, Marsella M, Rotonda T, Tommasi P, Soccodato C (2009) “Study of a rock slide in a limestone formation with clay interbeds”. Proceedings of International Conference on Rock Joints and Jointed Rock Masses, Tucson, Arizona, USA 7th-8th January 2009
Graziani A, Rotonda T, Tommasi P (2012) Fenomeni di scivolamento planare in ammassi stratificati: situazioni tipiche e motodi di analisi”. In: Barla G, Barla M (eds) Problemi di stabilità nelle opere geotecniche, MIR 2012, Torino, November 30th- Dicember 1st 2011. Pàtron, Bologna, pp 93–124
Hoek E, Bray JW (1981) Rock slope engineering. The Institution of Mining and Metallurgy, London, 358 pp
Intrieri E, Gigli G, Mugnai F, Fanti R, Casagli N (2012) Design and implementation of a landslide early warning system. Eng Geol 147–148(2012):124–136
Mikkelsen PE (1996) Chapter 11 - field instrumentation. In: Turner AK, Schuster RL (eds) Landslides investigation and mitigation. Transportation Research Board, Washington, pp 278–318
Monserrat O, Crosetto M (2008) Deformation measurement using terrestrial laser scanning data and least squares 3D surface matching. ISPRS J Photogramm Remote Sens 63:142–154
Munjiza A (2004) The combined finite-discrete element method. Wiley, New York, 333 pp
Munjiza A, Owen D, Bicanic N (1995) A combined finite-discrete element method in transient dynamics of fracturing solids. Eng Comput 12(2):145–174
O’Connor KM, Dowding CH (2000) Comparison of TDR and inclinometers for slope monitoring. Proceedings of GeoDenver 2000, Denver, Colorado August 5th-7th, 2000, 12 pp
Pieraccini M, Casagli N, Luzi G, Tarchi D, Mecatti D, Noferini L, Atzeni C (2003) Landslide monitoring by ground-based radar interferometry: a field test in Valdarno (Italy). Int J Remote Sens 24(6):1385–1391
Piovano G, Barla G, Barla M (2011) FEM/DEM modeling of a slope instability on a circular sliding surface. Proc. of IACMAG 2011, Melbourne, Australia, 9-11 May 2011, 6 pp
Piovano G, Antolini F, Barla M, Barla G (2013) Continuum-discontinuum modelling of failure and evolution mechanisms of deep seated landslides. In: 6th International Conference on Discrete Element Method, Golden, USA, 5-6 August 2013, 295-300
Popescu ME (2002) Landslide causal factors and landslide remedial options. Proc. 3rd Int. Conf. Landslides, Slope Stability and Safety of Infra-Structures, Singapore, 2002, pp. 61–81
Salciarini D, Tamagnini C, Conversini P (2009) Discrete element modeling of debris-avalanche impact on earthfill barriers. Phys Chem Earth 35(2010):172–181
Teza G, Galgaro A, Zaltron N, Genevois R (2007) Terrestrial laser scanner to detect landslide displacement fields: a new approach. Int J Remote Sens 28(16):3425–3446
United Nations International Strategy for Disaster Reduction (UNISDR) (2009) Terminology on Disaster Risk Reduction. Available at http://www.unisdr.org
Uzielli M, Nadim F, Lacasse S, Kaynia AM (2008) A conceptual framework for quantitative estimation of physical vulnerability to landslides. Eng Geol 102:251–258
Acknowledgments
The work described in this paper was partially funded by the Italian Ministry of Instruction, University and Research (MIUR) in the framework of the National Research Project PRIN 2009 titled “Integration of monitoring and numerical modelling techniques for early warning of large rockslides.” The project was carried out by the Department of Earth Sciences of the Università degli Studi di Firenze (National coordinator and Responsible of the Research Unit: Prof. Nicola Casagli), the Department of Electrical, Electronic and Information Engineering “Guglielmo Marconi” of the Università degli Studi di Bologna (Responsible of the Research Unit: Dr. Andrea Giorgetti) and the Department of Structural, Building and Geotechnical Engineering of Politecnico di Torino (Responsible of the Research Unit: Dr. Marco Barla).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Barla, M., Antolini, F. An integrated methodology for landslides’ early warning systems. Landslides 13, 215–228 (2016). https://doi.org/10.1007/s10346-015-0563-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10346-015-0563-8