
Abstract
Background
The single-port daVinci robot is a new platform designed to facilitate single-incision surgeries. The objective of this study was to describe the first clinical experience in colorectal surgery using a novel single-port robotic system and report its feasibility and safety.
Methods
After Institutional Review Board approval was obtained and the study was registered with ClinicalTrials.gov, we performed single port robot-assisted left colectomy using the novel daVinci SP surgical system on two patients. The surgeries were completed through a single incision. The multichannel port accommodates a three-dimensional articulating camera and three double-jointed articulating instruments. The primary aim of this study was to report, for the first time in the USA, the technical feasibility of the procedure in the living human. The secondary aim was to report the outcomes including blood loss, number of incisions, number of dockings, docking time of the robot, incision length, operative time, console time, need for additional port and instrumentation, intraoperative complications, morbidity and mortality, time for tolerating diet, bowel function, and discharge.
Results
Both surgeries were completed without conversion through a single incision, 4.0 and 4.5 cm in size. Estimated blood loss was less than 60 ml in both cases. The robot was docked two and three times. Mean time to dock was 13 min (range 3–33 min). There were no intraoperative complications, no morbidity or death. Discharges occurred on postoperative days 2 and 3.
Conclusions
Single-port robotic colectomy using the new robot is feasible and can be safely completed. The overall utility and functionality of the SP robot portends wide utilization and expansion of this technique. Careful development and analysis of the procedure outcomes, training, and cost will be necessary to properly advance the field.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Minimally invasive surgery (MIS) has become the standard of care in colorectal surgery. The multiple benefits are now well recognized: quicker recovery, less postoperative pain, shorter hospital stay, less blood loss, and lower infection rates without compromising the oncologic outcomes [1,2,3]. However, the adoption of laparoscopy has been slow mainly because of the technical challenges and the steep learning curve [1]. To overcome these challenges and in an attempt to make MIS more readily accessible, a robotic platform was designed and the first report of robotic-assisted colectomy was published in 2002. In parallel, laparoscopic surgeons were trying to push the limit of MIS by minimizing the parietal trauma and improving cosmesis. Single-incision laparoscopic surgery (SILS) was introduced in 2008 by Geisler and colleagues at the Cleveland Clinic [4]. A major disadvantage of this technique, however, is that it is more technically challenging and has never been shown in any trials to offer any substantive advantages. Nonetheless, the cosmetic advantages are readily apparent and several reports suggested improved pain control and recovery [4,5,6]. Attempts to reproduce the laparoscopic single-incision surgery using the daVinci Si and Xi robots showed that it was feasible and safe [7]. However, these were limited to few case series due to the technical and logistical challenges and the unsuitable design of the platform [8, 9].
The development of a robotic single-arm, single-port system (daVinci SP Surgical System) with wristed articulation and flexible elbows, console controlled camera, and instrument movement, and three-dimensional (3D) optics and a holographic instrument positioning monitor represent significant progress in the field of endoluminal, single-port transanal, and transabdominal surgery.
We present the first report of patients undergoing single-port transabdominal colectomy using the novel daVinci SP-robotic system. Please note that this robotic platform has not yet been granted Food and Drug Administration (FDA) approval for colorectal procedures.
Materials and methods
Study protocol
Following Institutional Review Board (IRB) approval (Protocol ID: F/N-R19-3864L) and registration on ClinicalTrials.gov (ID#: NCT03700593), patients were enrolled to undergo single-incision robotic-assisted colectomy using the daVinci SP Surgical System (Intuitive Surgical, Sunnyvale, CA, USA). All procedures were performed by one attending surgeon (J.M.) who was involved in the development of the SP robot and had published his cadaveric experience using it [10].
All patients who were candidates for colectomy were considered for inclusion in the study. Exclusion criteria specified emergency surgery, pregnant women, and an inability to give informed consent. The patient demographics collected included patient age, sex, body mass index, and pre- and postoperative diagnosis. The data analyzed were estimated blood loss, number of incisions, incision length, number of dockings, docking time of the robot, operative time, console time, need for additional port and instrumentation, intraoperative complications, morbidity and mortality, time for tolerating diet, bowel function, and discharge.
In October 2018, two patients diagnosed with diverticulitis, underwent single-port robot-assisted left colectomy with primary anastomosis using the daVinci SP robot and are the basis of this report.
The dedicated 25-mm multichannel port was inserted through a GelPoint access platform (Applied Medical), accommodating a 12 × 10 mm oval articulating robotic camera, and three 6-mm double-jointed articulating robotic instruments. Two additional 5-mm trochars were placed in the GelPoint for the assistant and for insufflation via an AirSeal trocar (Fig. 1).

Placement of the assistant port and 25-mm multichannel instrument port through the GelPoint access platform
The primary aim was to evaluate the safety and technical feasibility to perform a single port robotic left colectomy using the SP robot (rSILS).
Novel operative instrumentation
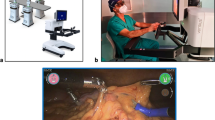
The daVinci SP robot is a new robotic platform designed to allow single-incision surgery. The system includes three multi-jointed, fully wristed, elbowed instruments and the first fully wristed three-dimensional high definition camera (Fig. 2a–c).

a Extracorporeal view of the three, multi-jointed instruments and three-dimensional high definition camera through the 25-mm instrument port. b Demonstration of the multi-jointed, fully wristed, and elbowed needle driver. c Three-dimensional, fully wristed high definition camera
The instruments and the camera are introduced through a single 25 mm port and are properly triangulated around the target anatomy owing to their intracorporeal multi-joints to avoid external instrument collisions that can occur in narrow surgical workspaces (Fig. 3).

Intracorporeal view of the deployed, multi-jointed instruments
The system enables flexible port placement and excellent internal and external range of motion through the single “C shaped” arm. The surgeon controls the fully articulating instruments and the camera on the daVinci SP system, which uses a similar console as the daVinci X and Xi systems. There is an additional foot pedal, to move the entire operative field of instruments and camera together as one.
The current SP instruments include a Cadiere forceps, bipolar graspers, scissors, needle driver, and clip applier (Fig. 4). The system lacks a vessel sealer, stapler, and suction/irrigation system.

Single-port instrument tips and bases. From left to right, medium–large clip applier, Maryland bipolar forceps, Cadiere forceps, needle driver, fenestrated bipolar forceps, and monopolar-curved scissors
Operative technique
Under general endotracheal anesthesia, the patients were placed in a supine split-leg position with the arms tucked along the body. A 4-cm transverse rectus abdominus muscle-splitting incision was made in the right lower quadrant (Fig. 5).

Four cm transverse rectus abdominus incision marked
The peritoneal cavity was entered and a Gel Point was placed. An assistant port was introduced in the Gel Point. The patients were then placed in 5° reverse Trendelenburg and 18° right-side down. The single port robot was brought-in over the patient’s left side and docked successfully (Fig. 6).

Single-port robot docked over the patient’s left-hand side
The gastrocolic ligament was identified and opened with the robotic scissors. The bedside assistant transected the perforating vessels using a vessel sealer device (LigaSure) introduced through the assistant port. The lesser sac was entered and the splenic flexure was mobilized in a standard medial-to-lateral supracolic fashion. All instruments were then removed and the robot was undocked. The patient was placed in 18° Trendelenburg position, 18° right-side down. The single port robot was brought back in and docked. The small bowel was positioned in the right upper and lower quadrant. The retroperitoneum was incised from the sacral promontory to the duodenal–jejunal junction. The inferior mesenteric artery (IMA) was dissected free. Two clips were applied (Fig. 7).

Dissected inferior mesenteric artery (IMA) with one clip applied
The LigaSure was used to transect in between after identification of the left ureter. The inferior mesenteric vein (IMV) was then identified and transected in a similar fashion. The mesentery was dissected in a medial-to-lateral fashion. Once this was done, the lateral attachments were fully mobilized. Attention was then directed to the pelvis: using scissors, the upper rectum was dissected distal to the area of inflammation and the mesentery was dissected-free circumferentially and then transected with the scissors and the bipolar device. The rectum was irrigated and transected with two firings of Endo GIA purple load introduced via a 12 mm assistant port inserted through the GelPoint. The robot was then undocked and the specimen was exteriorized through the same incision. The specimen was transected after an automatic purse-string was applied. A 28 EEA anvil was inserted and secured. This was dropped back into the abdominal cavity. The robot was re-docked. The anvil was mated with the circular stapler introduced through the anus in a standard fashion and the stapler was fired. The two donuts were intact. An air leak test under water was negative. The robot was undocked and the incision was closed in a standard fashion (Figs. 8, 9).

Undocked and undraped Single Port robot

Four cm incision 2 weeks following discharge
Results
Patient characteristics are summarized in Table 1. Both procedures were successfully completed using the SP robot without the need for additional ports. Docking and console times are reported in Table 2. Mean time to dock the robot was 13 min. This decreased from a mean of 22 min in the first case to 7 min in the second case. Estimated blood loss was 20 ml and 60 ml. No intraoperative complications occurred. Incision lengths were 4.0 cm and 4.5 cm (Table 3). The size of the specimens were 18.0 cm and 20.5 cm, respectively (Fig. 10).

Specimen measuring 20.5 cm in length
Patients were started on a clear liquid diet on postoperative day (POD) 1 and POD0, and both were advanced to a low residue diet on POD2. In addition, they both had their first flatus and bowel movement on POD2, and they were discharged home on POD2 and POD3 (Table 4).
Discussion
Despite its introduction more than a decade ago, SILS still lacks large-scale adoption in the surgical community mainly due to its technical difficulty and ergonomic challenges for the operative team [1]. The main challenges of this approach are twofold: (1) The collisions and trapping of multiple instruments through a small abdominal incision and (2) The hands of the camera operator, surgeon, and assistant competing for the same space on the outside of the patient. To minimize these collisions, one can cross instruments intra-abdominally. However, in doing so, the procedures become more challenging, since the instrument seen in the left surgical field is controlled by the right hand and vice versa. Even with the instruments crossed, oftentimes reach intra-abdominally is limited. Then, challenges related to poor positioning with the assistant, poor ergonomics, camera instability, and two-dimensional view have significantly dampened enthusiasm and adoption of SILS in colorectal cases. Attempts to overcome these challenges using the daVinci Si or Xi robotic platforms resulted, and while feasible, experience was limited to few case series due to persistent technical challenges from the unsuitable design. The rigid robotic instruments limit the range of motion. While the wristed articulation was helpful, the arm collisions made this robotic platform not well suited to SILS surgery.
The SP robot was designed to apply the robotic platform to single-port surgery. By housing the camera and three instruments into a single 25-mm shaft, the collisions are kept to a minimum. The elbow deployment allows for the instruments to deploy in a diamond fashion and the entire operative field can move as a single unit based on the fulcrum of entry at the abdominal wall. In addition, a holographic display on the operative panel (Fig. 3) allows the surgeon to track the orientation of the instruments in reference to themselves internally, to minimize conflicts. The wide space within the abdominal cavity allows easy deployment of the single-port elbowed instruments.
This study represents an early initial experience performing rSILS left colectomy. The surgery was successfully performed without complications in both cases. While our operative times are longer than typical for these procedures, we should recognize that these cases were our initial experience using the new SP platform. Familiarity with the system will predictably decrease operative times. Docking of the robot was easily mastered, as demonstrated by the 15 min mean docking time decrease between the first and second cases. Incision length was small at 4.0 and 4.5 cm. Most importantly, there were no intraoperative or postoperative complications. Both patients were tolerating diets, moving their bowels, and discharged home on POD2 and POD3. Blood loss was ≤ 60 ml in both cases. The rSILS left colectomies were readily accomplished without the need for other trocar placement through the abdominal wall. The assistant port through the GelPoint was essential for aspiration, passage of the vessel sealer and stapler, and easily accessible by the tableside surgeon.
This initial experience with the SP robot for left colectomy is very encouraging. The ease of use, spatial orientation, and collision prevention are improvements over previous robotic platforms and are especially noteworthy in a single-port platform. This new platform needs upgrades which will predictably occur when the previously developed robotic instruments are adapted to it. In particular, the lack of an SP vessel sealer, stapler and suction devices significantly hamper the operative surgeon. A future stapler for the SP robot will facilitate intracorporeal division of the specimen and anastomosis.
Conclusions
Single-port robotic colectomy using the new SP robot is feasible and can be safely completed. The overall utility and functionality of the SP robot for rSILS portends wide utilization and expansion of this technique moving forward. Careful development and analysis of the procedure outcomes, training, and cost will be necessary to properly advance the field.
References
Salem J, Gummadi S, Marks J (2018) Minimally invasive surgical approaches to colon cancer. Surg Oncol Clin N Am 27(2):303–318
Clinical Outcomes of Surgical Therapy Study G (2004) A comparison of laparoscopically assisted and open colectomy for colon cancer. N Engl J Med 350(20):2050–2059
Komenaka IK, Giffard K, Miller J, Schein M, Erenoglu C, Akin ML, Uluutku H, Tezcan L, Yildirim S, Batkin A, Egger B (2000) COLOR: a randomized clinical trial comparing laparoscopic and open resection for colon cancer. Dig Surg 17(6):617–622
Remzi FH, Kirat HT, Kaouk JH et al (2008) Single-port laparoscopy in colorectal surgery. Colorectal Dis 10(8):823–826
Buscher P, Pugin F, Morel P (2008) Single port access laparoscopic right hemicolectomy. Int J Colorectal Dis 23(10):1013–1016
Marks JH, Montenegro GA, Shields MV, Frenkel JL, Marks GJ (2015) Single-port laparoscopic colorectal surgery shows equivalent or better outcomes to standarad laparoscopic surgery: results of a 190-patient, 7-criterion case-macth study. Surg Endosc 29(6):1492–1499
Ostrowitz MB, Eschete D, Zemon H, DeNoto G (2009) Robotic-assisted single-incision right colectomy: early experience. Int J Med Robot 5(4):465–470
Juo YY, Agarwal S, Luka S, Satey S, Obias V (2015) Single-Incision robotic colectomy (SIRC) case series: initial experience at a single center. Surg Endosc 29(7):1976–1981
Bae SU, Jeong WK, Baek SK (2017) Current status of robotic single-port colonic surgery. Int J Med Robot 13(1):e1735
Marks J, Ng S, Mak T (2017) Robotic transanal surgery with utilization of a next-generation single-port system: a cadaveric feasibility study. Tech Coloproctol 21(7):541–545
Funding
There are no funding sources to report.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
Dr. John Marks has been engaged with Intuitive Surgical in a consultative fashion to help develop the safe application of the SP robot. This has entailed detailed conversation as well as cadaver work utilizing a protocol robot. Over this period, he has been compensated $5000.00. The other authors declare that they have no conflict of interest.
Ethical approval
All procedures performed in studies involving human participants were in accordance with the ethical standards of the institutional and/or national research committee and with the 1964 Helsinki declaration and its later amendments or comparable ethical standards.
Informed consent
Informed consent was obtained from all individual participants included in the study.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Marks, J.H., Salem, J.F., Anderson, B.K. et al. Single-port robotic left colectomy: first clinical experience using the SP robot (rSILS). Tech Coloproctol 24, 57–63 (2020). https://doi.org/10.1007/s10151-019-02129-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10151-019-02129-0