
Abstract
Reproductive modes in marine invertebrates can be generally grouped into two types: those brooding larvae and those broadcast-spawning gametes into the water. We asked if these different life-history strategies differ based on how contribution to fitness is partitioned between growth, stasis, and reproduction. To investigate this question, we used published demographic data on ten diverse species of marine bivalves. We parameterized simple matrix-population models and calculated the sums of elasticities to growth, stasis, and reproduction parameters and plotted the results on triangular axes. We also assessed whether contribution patterns were correlated with reproductive mode and tropical, temperate, or polar environments. We found that some of the broadcast spawners fell in the region of the plot with high elasticities for stasis and that some of the brooders fell in the region of the plot with higher growth and reproduction elasticities than stasis ones. However, instead of a sharp dichotomy, we found a continuum in contributions of stasis parameters with long-lived brooders and short-lived broadcast spawners in the same region of the plot. There was no clear pattern of reproductive mode associated with any particular environment, but we think these preliminary results are intriguing and that further work on comparative demography of marine invertebrates is warranted.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
Life-history strategies are suites of co-adapted demographic traits that determine population dynamics in any given environment. These co-adapted traits can be categorized as relating to growth, survival, or reproduction, with life-history strategies differing in the emphasis placed on each category. Understanding the relative importance of types of trait in a life-history strategy can help predict the response of populations to stochasticity (Pfister 1998; Jonsson and Ebenman 2001) and inform conservation strategies by identifying the most effective management targets (Heppell et al. 2000).
Comparative study of life-history strategies is a powerful method of analyzing the importance of particular traits in different environments. Grime (1977) hypothesized that amounts of stress and disturbance in an environment determine life-history strategy. He categorized plant species as competitors (C), stress-tolerators (S), or weedy species (R) by the levels of particular life-history traits they display, and found that species from similar environments tend to share many life-history traits (Grime 1977). When C, S, and R are plotted against one another on triangular axes, groups of species from similar environments tend to fall in particular regions on this plot.
Grime’s approach was made quantitative by Silvertown et al. (1992), who performed eigenvalue elasticity analysis of matrix-population models. In a matrix-population model, the life cycle of the organism is divided into stages, and data on survival in each stage, growth or development rates between the stages, and fecundity (collectively known as the vital rates) are used to calculate the elements of the projection matrix A, whose dominant eigenvalue λ, is the asymptotic population growth rate and measures average fitness of individuals in the population (Caswell 2001). Elasticities are the proportional sensitivities of λ to changes in individual matrix elements and can be interpreted as measuring the relative contributions of different matrix elements to fitness (Caswell 2001).
The elasticities of λ to the elements of any matrix A always sum to unity (de Kroon et al. 1986). Therefore by summing the elasticities of the growth parameters, the stasis parameters, and the reproduction parameters separately, one can identify the relative contribution of each type of parameter to fitness. By equating the “competitors” of Grime’s scheme to growth-maximizers, the “stress-tolerators” to stasis-maximizers, and “ruderals” or weedy species to reproduction-maximizers, the descriptive CSR scheme has been interpreted as a quantitative GPF scheme and plotted in the same way on triangular axes (Silvertown et al. 1992, 1993, 1996). A potential flaw in this method is that some of the matrix elements are each calculated from more than one vital rate (such as survival and growth), so elasticities are not for the vital rates themselves (Shea et al. 1994). Franco and Silvertown (2004) showed, however, that the patterns of elasticity of λ to vital rates and to the matrix elements are essentially the same.
This method has been used to compare populations within a species (Oostermeijer et al. 1996; Silvertown et al.1996; Heppell 1998; Valverde and Silvertown 1998), and to compare multiple species of plants (Silvertown et al. 1993, 1996; Franco and Silvertown 1996; Franco and Silvertown 2004), birds (Sæther and Bakke 2000; Sæther et al. 1996), mammals (Heppell et al. 2000), and turtles (Cunnington and Brooks 1996; Heppell 1998). One way to describe some of the observed diversity is as a continuum from “fast” strategies, where maturation is early and reproductive effort is high but limited to one (semelparity) or few events, to “slow” strategies, where survival after maturity is high and reproductive effort is low but repeated many times (iteroparity) (Sæther and Bakke 2000; Jonsson and Ebenman 2001). Although there is variation in exactly where populations or species fall in elasticity space, there is general consensus that those with fundamentally different life-history strategies can be distinguished by this method. An interesting observation is that distantly related taxa with quite different vital rates may have the same summed elasticities (Heppell et al. 2000).
Marine invertebrate life-history strategies, which are more complicated and much more diverse than those of vertebrates, have been conspicuously neglected as subjects of this analysis. One way to categorize these diverse life-history strategies is as reproductive modes using either broadcast spawning or larval brooding. The former group releases gametes into the water column where larvae develop before metamorphosis and settlement into the adult habitat, while the latter retains the embryos within the shell for part or all of the development time, releasing benthic larvae or crawl-away juveniles. In some species of spionid polychaetes and opisthobranch mollusk individuals can even switch between strategies (Levin and Bridges 1995). Brooders and broadcasters differ most in juvenile survival (higher for brooders), fecundity (lower for brooders), and adult body size (smaller for brooders) (e.g., Strathmann and Strathmann 1982). These strategies represent extremes in a continuum of parental trade-offs between quantity of offspring and quality of offspring, with fecundity differing between the strategies by several orders of magnitude.
Limited generalizations can be made on the ecological role of these reproductive types (Havenhand 1995). The most paradigmatic is “Thorson’s Rule” (Thorson 1950) that the proportion of broadcast spawning species is higher at the equator and the proportion of brooders is higher toward the poles. Polar, temperate, and tropical marine environments differ in the level of primary productivity and disturbance (Thorson 1950; Valiela 1995). The low temperatures and short phytoplankton blooms make polar environments limiting both for larval development and adult survival. Temperate coastal waters have annual phytoplankton blooms, so resources are not limiting, but disturbance and biotic interactions are more intense and frequent than the largely disturbance-free shelf habitats of the polar seas. Shallow tropical waters have constant but low productivity. More thorough sampling has shown that the distribution of invertebrate reproductive types is not as clear-cut as Thorson thought it was (Levin and Bridges 1995), but the similarity of his hypothesis to the idea that plants show differing elasticity structures in different environments is relevant here. Using Grime’s scheme, we would expect stress-tolerant species (S) in polar habitats, weedy species (R) in temperate habitats, and competitors (C) tropical habitats.
Bivalve molluscs are a highly successful group of marine invertebrates, found from the high intertidal to the deep sea throughout the world ocean. They exhibit great diversity in life-history strategies. However, a common phylogenetic history limits the extent of possible adaptations observed in bivalves. The goal of this paper is to determine if brooding and broadcast spawning bivalves show different patterns of contribution to fitness by growth, stasis, and reproduction, and to evaluate if these patterns are related to stress and disturbance levels of their environments in the same way that they are in plants.
Methods
The model
We created a simple demographic model that included growth, survival, and reproduction, and from which fitness could be calculated. The model was complex enough to include the differences between the species, and describe all the life histories, but simple enough to parameterize from available data. We chose to use a stage-classified model, which divided the life cycle of the bivalve into three intervals of age corresponding to periods with different rates of survival and reproduction. The length of time spent in each stage depended on the life span of the organism and the timing of the life cycle events. More specifically, we defined stage one as beginning one year from fertilization. Stage two began when the first of the major life-history events occurred, such as a substantial change in survival. Stage three began when another of these events occurred, such as attaining sexual maturity. Bivalves survived and remained in stage three with a probability that was dependent on their life span. Simplified or partial models such as this one have been shown to reasonably capture the dynamics of fully parameterized age-structured models (Yearsly and Fletcher 2002; Oli 2003). Furthermore, collapsing age-structured models to stage-structured ones does not shift elasticities much and if it does it shifts all species in the same direction so inter-specific comparisons can still be made (Enright et al. 1995).
Population dynamics are given by:
where
and n is a vector of stage abundances. The P parameters are probabilities of surviving while staying in the same stage and the G parameters are probabilities of surviving and progressing to the next stage. The F parameters are the number of offspring produced per female that survive the first projection interval. The projection interval used was one year.
Parameters were estimated from the variety of types of data that were found, ranging from projection matrices to size–frequency histograms, which are described in detail for each species in the Electronic supplementary material. Methods applicable to all or most species are listed in this section and are based on Caswell (2001). In general, reproductive contribution parameters were calculated as:
where m i is the maternity function expressed as female offspring per female and σ 1 is the probability of survival to age one. If maternity data or first-year survival probabilities were not available, an average recruitment of juveniles was estimated instead as:
In this case, if the information was available, reproductive output was divided between the stages in proportion to their contribution to population reproductive output.
The growth (G i ) and stasis (P i ) parameters depend on survival and stage duration. Growth parameters were calculated as:
where γ i is the reciprocal of the mean stage duration, and σ i is an estimate of survival probability in stage i. Survival was estimated as:
where μ(x) is the annual mortality rate at age x (also called Z x in fisheries literature) when these parameters were reported in the literature. The survival probability had to be estimated in other ways in several cases, which are described in detail with the parameter estimates below. Stasis parameters were estimated:
for i = 1 and 2. For i = 3,
where x m is the maximum age reported, and x 3 is age upon entering stage three. This function makes 1% of the population survive until age x m . We identified the age which only 1% of the population attained from population age compositions or as the oldest age reported.
Parameter calculations for species for which projection matrices were available were made from these matrices. Reported annual matrices with more than three stages were compressed to three stages. To do so, the proportion of the population starting in each stage was calculated as the sum of the elements in the stable stage distribution falling in the stage. For each stage, the elements outside that stage in the stable stage distribution were replaced with zeros. This vector was multiplied by the annual matrix. Contributions from that stage to the others were calculated as the sum of the elements in the resulting vector falling in each stage, divided by the proportion of the population that started in that stage.
Bivalve species
Our choice of species was dictated by the availability of data. The species for which data were available represent a range of adult size, life span, and habitat latitude and type (Table 1). In order to use the same model structure, which is useful in making interspecific comparisons (Enright et al. 1995), all species had to have a life span of at least three years. Where ages were reported, we assumed that shell growth rings are formed annually (as was assumed by the authors of literature cited here) and that populations were sampled without bias with respect to age. Finally, species were used if most of the information required to parameterize the model was available in the literature. Where necessary, arbitrary estimates of missing parameters were made from anecdotal evidence. Descriptions of parameter estimation for each species are detailed in the Electronic supplementary material (S1).
Matrix analysis
We calculated population growth rate as the dominant eigenvalue of the projection matrix. This measures the fitness of a phenotype characterized by the parameters in A. We then standardized the projection matrices so that λ was equal to unity. This standardization is justified since the long-term average growth rate of each population must be close to unity, otherwise species would tend toward extinction or overpopulation. Further, since elasticities vary with population growth rate, setting λ = 1 eliminates differences in elasticity structure due solely to differences in population growth rate. Standardization was done by multiplying F 2 and F 3 by a value k, which changed λ to unity. Only the reproductive parameters were adjusted since they are not only difficult to measure but may vary from year to year over wider ranges than do growth and survival (Nakaoka 1993).
The remaining analyses were done on the adjusted matrices. Of principle interest in this study were the elasticities:
where
and v and w are the left and right eigenvectors of A. Elasticities are proportional sensitivities to proportional changes in parameter values a ij . Sums of elasticities to the P i , F i , and G i parameters were calculated.
All analyses were done using Matlab (v. 4.2, The Mathworks, Inc.).
Results
Estimated parameter values (Table 2) and the population growth rates calculated from them (Table 3) showed that while none of the populations were at equilibrium, population growth rates were at least reasonable. Although calculated values of λ for some populations were far from unity, the average over the ten species was about 0.95. For the broadcast-spawning bivalves, λ was equal to P 3 in some cases (ranging from 0.72 to 0.97), while for the brooding bivalves, λ varied from 0.52 to > 1 and did not correspond to any one matrix element. For most of the broadcast spawning species, values for k (Table 3) were large because, although population growth rates were close to unity, elasticities (Table 4) to F i were small, so large changes in F i were required to alter λ. For all species, elasticities to early and late growth (G 1 and G 2) were nearly equal, regardless of any difference in magnitude of G 1 and G 2. For all broadcast spawners except Y. notabilis, the parameter P 3 always had the largest or second-largest elasticity, and elasticity to P 2 was always greater than to P 1. For brooders, G 1 had the highest or second-highest elasticity, with F 2, P 3 or F 3 and G 2 also having high values.
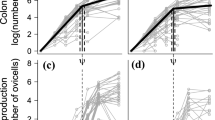
Sums of elasticities in the growth, stasis, and reproduction categories for each species are shown in Fig. 1. For the bivalve species analyzed here with this model structure, sums of elasticities for stasis parameters ranged almost from 0 to 1, while sums of elasticities for growth parameters were all < 0.7 and sums for fecundity parameters were all < 0.5. This caused the species to be located in elasticity space approximately along a line from the middle left to bottom right of the plot. In general, broadcast spawners form a cluster in the lower right-hand portion of the graph, while brooders fall in the center and upper left of the graph. However, there is a region in the center of the plot where they both occurred suggesting that distinction between the two reproductive modes is not a sharp boundary but rather a continuum.

Elasticity structures of bivalve life histories. The sums of elasticities to P i , F i , and G i plotted against one another. The squares are brooding species; the circles are broadcasting species. Note that only two of the variables are independent as all elasticities sum to unity
The two species which cause the reproductive modes to overlap in Fig. 1 are the brooder Lissarca notorcadensis and the broadcast spawner Geukensia demissa. The P 3 parameter for L. notorcadensis was larger than for other brooders and it was the largest matrix element for this species because it lives eight years longer than the next most long-lived brooder. The P 3 parameter for G. demissa is lower than for the other broadcast spawners and its life span is only about four years. In part because of the model structure, life span, not reproductive mode per se, was determining elasticity structure for these species.
Discussion
Our results show that the patterns of contributions to fitness by the three categories of parameter can differ between brooding and broadcast spawning bivalves. As strategy changes from brooding to broadcast spawning, the pattern shifts from fitness depending on growth and fecundity to fitness depending on stasis. However, there is a continuum of contributions to λ by stasis parameters for the species analyzed here and a region in elasticity space where the two strategies are both found, suggesting that a strict distinction between the two types of strategy may be artificial.
While it is possible that bivalves are architecturally constrained to only the portion of the elasticity space graph we observed, our sample size is far too small to conclude so—we used only ten species of the ca. 20,000 described (Brusca and Brusca 2003). Analyses on plants (Silvertown et al. 1993) have shown that they cover more regions of the elasticity space than do bivalves, however, the plants analyzed represent many more species and much greater taxonomic diversity than we addressed here. The exclusion of species with life spans shorter than three years definitely biased the outcome away from the bottom left corner of Fig. 1, where reproduction would be the most important factor. Data on more species may well fill the gaps in parameter space that we observed, although our results show an intriguing trend warranting further investigation.
One of the main points of the Grime/Silvertown triangle scheme is that the types of plant life-history strategy are found in species occupying habitats with particular ecological characteristics. Thorson (1950) suggested that environmental factors at different latitudes and water depths determine the reproductive strategy of marine invertebrates. Interpreting Thorson’s predictions in Silvertown’s terms, we would expect to see the Antarctic scallop in the region of elasticity space occupied by woody plants (high elasticity to P), the temperate species occupying the location of semelparous herbs (high elasticity to F), and the tropical giant clam where iteroparous herbs are found, with high elasticity to G (Silvertown et al. 1993). Instead, our results show that the largest, longest-lived species (including T. gigas) correspond to woody plants regardless of latitude, and that the rest of the species fall more or less into the region occupied by “iteroparous herbs of open habitats” (Silvertown et al. 1993, Fig. 3). Assuming that the way we have characterized marine habitats is indeed equivalent to Grime’s categories, even our small data set includes bivalve species with life-history strategies contradicting the predictions made for plants.
Thorson’s suggestion that brooding and broadcast spawning were characteristic of particular habitats has also been belied as more species’ reproductive modes have been determined. The proportion of bivalve species that brood may be higher in communities in the Antarctic and the deep sea (Grahme and Branch 1985), but other life histories are present also. Brooding and broadcasting species are found in all environments, whether categorized by latitude or by tidal level. Brooders are found in the high intertidal, a very stressful environment, but so are broadcasters.
Another way of characterizing different life-history strategies is along the “slow–fast continuum”, meaning those species that reproduce early with large clutch sizes and have high adult mortality versus those that delay reproduction, have small clutches, and live for a long time (Sæther and Bakke 2000; Jonsson and Ebenman 2001). Heppell et al. (2000) showed that mammals with “fast” strategies had high elasticities to fertility parameters, whereas those with “slow” strategies showed high elasticities to either adult or juvenile survival. Bivalve life-history strategies do not fit neatly into the “slow–fast” model. They typically grow rapidly to a size refuge from predation before becoming reproductively mature; age at maturity for species included here ranged from two to five years. This is a “slow” characteristic, but fecundities of even the smallest brooding species are larger than most mammals’ clutch sizes. Growth in bivalves is indeterminate and fecundity can increase with age/size, a condition that violates an assumption of the model which explains the slow–fast continuum hypothesis (Charnov 1991). The same problem applies to plants with clonal growth, and Franco and Silvertown (1996) concluded that some of the trade-offs predicted by the continuum model were true for plants but that others were not. An alternative explanation is that high fecundity in long-lived bivalves is a bet-hedging strategy, to which Sæther and Bakke (2000) attributed anomalous life-history trait combinations that they found in birds.
Other authors have contemplated the marked difference in marine invertebrate reproductive mode by asking the questions: “what are the costs and benefits of having planktonic larvae?” (Grahme and Branch 1985), “brood or broadcast?” (Menge 1975), or “to brood or not to brood?” (Strathmann et al. 1984). Perhaps the question to ask is: “How long to live?” We observed that the longer the life span, the less important reproduction and growth out of the first stage are in the life history. The largest contribution to fitness for all species with life spans of about 14 years or more (including the long-lived brooder) was made by stasis parameters P. For species with life spans <14 years, the largest contribution to fitness was made by growth parameters G. It should come as no surprise that degree of iteroparity affects fitness. However, there is a series of published models comparing reproductive modes, beginning with Vance (1973), which draw their conclusions based on fitness after one reproductive event. Comparisons between brooding and broadcasting based on one reproductive event are not valid if there is a difference between the numbers of reproductive events typical for each strategy, which we have shown here.
Key differences in brooding and broadcast spawning life histories may relate to time scales of variability. The longer the life span, the less important any one reproductive event is to overall species persistence. Long life spans may have led to the possibility of lower investment in riskier reproductive patterns. Medeiros-Bergen and Ebert (1995) and Ebert (1996) have shown for certain echinoderm species that even for a brooder, selection pressure appears to be towards long adult life span and that an important factor in reproductive mode is the negative relationship between larval survival and life span. Menge (1975) suggested that the small, brooding asteroid, Leptasterias hexactis would have to have a life span of over 1,500 years to be successful as a broadcast spawning species. This is due to the small volume available for egg production and the low survival of planktonic larvae. While it makes sense for small size to constrain bivalves to brooding, it is less clear why larger animals do not brood. Further work incorporating variability into demographic models on life-history strategies may be able to address this question.
References
Brusca RC, Brusca GJ (2003) Invertebrates. 2nd edn. Sinauer Associates Inc. Sunderland
Caswell H (2001) Matrix-population models: construction, analysis, and interpretation. 2nd edn. Sinauer Associates, Inc. Sunderland
Charnov EL (1991) Evolution of life history variation among female mammals. Proc Natl Acad Sci USA 88:1134–1137
Cunnington DC, Brooks RJ (1996) Bet-hedging theory and eigenelasticity: a comparison of the life histories of loggerhead sea turtles (Caretta caretta) and snapping turtles (Chelydra serpentina). Can J Zool 74:291–296
de Kroon H, Plaiser A, van Groenendal JM, Caswell H (1986) Elasticity: the relative contribution of demographic parameters to population growth rate. Ecology 67:1427–1431
Ebert TA (1996) The consequences of broadcasting, brooding, and asexual reproduction in echinoderm metapopulations. Oceanol Acta 19:217–226
Enright NJ, Franco M, Silvertown J (1995) Comparing plant life histories using elasticity analysis: the importance of life span and the number of life-cycle stages. Oecologia 104:79–84
Franco M, Silvertown J (1996) Life history variation in plants: an exploration of the slow–fast continuum hypothesis. Philos Trans R Soc Lond Ser B 351:1342–1348
Franco M, Silvertown J (2004) A comparative demography of plants based on elasticities of vital rates. Ecology 85:531–538
Grahme J, Branch GM (1985) Reproductive patterns of marine invertebrates. Mar Biol Annu Rev 23:373–398
Grime JP (1977) Evidence for the existence of three primary strategies in plants and its relevance to ecological and evolutionary theory. Am Nat 111:1169–1194
Havenhand JN (1995) Evolutionary ecology of larval types. In: McEdward L (ed) Ecology of marine invertebrate larvae. CRC Press, Boca Raton, pp 79–122
Heppell SS (1998) An application of life history theory and population model analysis to turtle conservation. Copeia 1998:367–375
Heppell SS, Caswell H, Crowder LB (2000) Life histories and elasticity patterns: perturbation analysis for species with minimal demographic data. Ecology 81:654–665
Jonsson A, Ebenman B (2001) Are certain life histories particularly prone to local extinction? J Theor Biol 209:455–463
Levin L, Bridges T (1995) Pattern and diversity in reproduction and development. In: McEdward L (ed) Ecology of marine invertebrate larvae. CRC Press, Boca Raton, pp 1–48
Medeiros-Bergen DE, Ebert TA (1995) Growth, fecundity and mortality rates of two intertidal brittlestars (Echinodermata: Ophiuroidea) with contrasting modes of development. J Exp Mar Biol Ecol 189:47–64
Menge BA (1975) Brood or broadcast? The adaptive significance of different reproductive strategies in the two intertidal sea stars Leptasterias hexactis and Pisaster ochraceous. Mar Biol 31:87–100
Nakaoka M (1993) Yearly variation in recruitment and its effect on population dynamics in Yoldia notabilis (Mollusca: Bivalvia), analyzed using projection matrix model. Res Popul Ecol 35:199–213
Oli MK (2003) Partial life-cycle models: how good are they? Ecol Model 169:313–325
Oostermeijer JGB, Brugman ML, de Boer ER, den Nijs HCM (1996) Temporal and spatial variation in the demography of Gentiana pneumonanthe, a rare perennial herb. J Ecol 84:153–166
Pfister C (1998) Patterns of variance in stage-structured populations: evolutionary predictions and ecological implications. Proc Natl Acad Sci USA 95:213–218
Sæther B-E, Bakke Ø (2000) Avian life history variation and contribution of demographic traits to the population growth rate. Ecology 81:642–653
Sæther B-E, Ringsby TH, Røskraft E (1996) Life history variation, population processes and priorities in species conservation: towards a reunion of research paradigms. Oikos 77:217–226
Shea K, Rees M, Wood SN (1994) Trade-offs, elasticities and the comparative method. J Ecol 82:951–957
Silvertown J, Franco M, McConway K (1992) A demographic interpretation of Grime’s triangle. Funct Ecol 6:130–136
Silvertown J, Franco M, Pisanty I, Mendoza A (1993) Comparative plant demography–relative importance of life–cycle components to the finite rate of increase in woody and herbaceous perennials. J Ecol 81:465–476
Silvertown J, Franco M, Menges E (1996) Interpretation of elasticity matrices as an aid to the management of plant populations for conservation. Conserv Biol 10:591–597
Strathmann RR, Strathmann MF (1982) The relationship between adult size and brooding in marine invertebrates. Am Nat 119:91–101
Strathmann RR, Strathmann MF, Emson RM (1984) Does limited brood capacity link adult size, brooding, and simultaneous hermaphroditism? A test with the starfish Asterina phylactica. Am Nat 123:796–818
Thorson G (1950) Reproductive and larval ecology of marine bottom invertebrates. Biol Rev 25:1–45
Valiala I (1995) Marine ecological processes. 2nd edn. Springer, New York
Valverde T, Silvertown J (1998) Variation in the demography of a woodland understory herb (Primula vulgaris) along the forest regeneration cycle: projection matrix analysis. J Ecol 86:545–562
Vance RR (1973) On reproductive strategies in marine benthic invertebrates. Am Nat 107:339–352
Yearsley JM, Fletcher D (2002) Equivalence relationships between stage-structured population models. Math Biosci 179:131–143
Acknowledgments
We would like to acknowledge the assistance of E. Horgan, M. Benfield, J. Pineda, C. Lewis, and M. Neubert with this project. The manuscript was greatly improved by suggestions from D. Medeiros-Bergen, L. Mullineaux, J. Weinberg, J. McDowell, T. Saitoh, and an anonymous reviewer, for which we thank them. This work was supported by a National Defense Science and Engineering Graduate Fellowship to B.R., and OCE-0083976 and DEB-9211945 to H.C.
Author information
Authors and Affiliations
Corresponding author
Electronic supplementary material
Below is the link to the electronic supplementary material.
Rights and permissions
About this article
Cite this article
Ripley, B.J., Caswell, H. Contributions of growth, stasis, and reproduction to fitness in brooding and broadcast spawning marine bivalves. Popul Ecol 50, 207–214 (2008). https://doi.org/10.1007/s10144-008-0075-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10144-008-0075-7