
Abstract
In this paper, the convergence conditions of the modulus-based matrix splitting iteration method for nonlinear complementarity problem of H-matrices are weakened. The convergence domain given by the proposed theorems is larger than the existing ones. Numerical examples show the advantages of the new theorems.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
In this work, we consider the nonlinear complementarity problem (\(\mathrm {NCP}(f)\)) consists of finding vectors \(z\in \mathbf {R}^{n}\) such that
where \(A\in \mathbf {R}^{n\times {n}}\), \(q\in \mathbf {R}^n\) and \(\varphi (z)\) is nonlinear function.
If \(\varphi (z)=0\), (1) reduces to the linear complementarity problem (\(\mathrm {LCP}(q,A)\)), which arises in the optimal stopping in Markov chain, the economies with institutional restrictions upon prices, the network equilibrium problems, the linear and quadratic programming, the free boundary problems and the contact problems; see [1, 2] for details.
In the recent years, the modulus-based matrix splitting iteration method and its various generalizations for solving \(\mathrm {LCP}(q,A)\) were widely studied, which yields a series of iteration methods, such as modulus-based Jacobi, Gauss–Seidel, SOR and AOR iteration methods. For more works about the modulus-based matrix splitting iteration method, see [3,4,5,6,7,8,9,10,11,12,13,14]. The global convergence conditions of these methods are discussed when the system matrix is either a positive definite matrix or an \(H_+\)-matrix; see the references mentioned above for details.
If \(\varphi (z)\) in (1) is a general function, then the problem (1) belongs to nonlinear complementarity problems, see [15, 16] for their important applications in various fields. In [17] and [18], the modulus-based matrix splitting iteration method for solving a class of \(\mathrm {NCP}(f)\) is established. Ma and Huang present the modified modulus-based matrix splitting iteration method in [19]. The two step modulus-based matrix splitting iteration method is given in [20]. The convergence results are given when A is a positive definite matrix in these works. When A is an H-matrix, the convergence analysis is presented only in [17], where the splitting is assumed to be an H-compatible splitting.
In this paper, the convergence theories of modulus-based matrix splitting iteration method for \(\mathrm {NCP}(f)\) of H-matrices is improved by giving a weaker condition of splitting and a lager convergence domain.
The rest of this paper is organized as follows. In Sect. 2 we give some useful notations, definitions and lemmas. In Sect. 3 we give the new convergence analysis. Numerical tests are presented in Sect. 4 and a conclusion remark is given in the final section.
2 Preliminaries
The goal of this section is to introduce some notations, preliminary definitions and necessary lemmas.
For two \(m\times n\) real matrices \(B=(b_{ij})\) and \(C=(c_{ij})\) the order \( B\ge (>) C\) means \(b_{ij}\ge (>) c_{ij}\) for any i and j. Let e be an \(n\times 1\) vector whose elements are all equal to 1, \(A=(a_{ij})\in \mathbf {R}^{n\times {n}}\) and let \(A=D_A=L_A-U_A=D_A-B_A\), where \(D_A, L_A, U_A\) and \(B_A\) are the diagonal, the strictly lower-triangular, the strictly upper-triangular and nondiagonal matrices of A, respectively. For \(v=(v_{1},...,v_{n})^{T}\in \mathbf {R}^{n}\), \(\mathrm {diag}(v)=\mathrm {diag}(v_{1},...,v_{n})\) denotes a diagonal matrix with \(v_i, i=1,2,\cdots ,n\) as its diagonal entries.
By |A| we denote \(|A|=(|a_{ij}|)\) and the comparison matrix of A is \(\langle {A}\rangle =(\langle {a_{ij}}\rangle )\), defined by \(\langle {a_{ij}}\rangle =|a_{ij}|\) if \(i = j\) and \(\langle {a_{ij}}\rangle =-|a_{ij}|\) if \(i\ne {j}\). The matrix A is called (e.g., see [21]) a Z-matrix if all of its off-diagonal entries are non-positive, an M-matrix if it is a nonsingular Z-matrix with \(A^{-1}\ge 0\), and an H-matrix if its comparison matrix \(\langle {A}\rangle \) is an M-matrix. Specially, an H-matrix with positive diagonal entries is called an \(H_+\)-matrix (e.g., see [22]).
The splitting \(A=M-N\) is called an M-splitting if M is an M-matrix and N is nonnegative; an H-splitting if \(\langle M\rangle -|N|\) is an M-matrix; and an H-compatible splitting if \(\langle A\rangle =\langle M\rangle -|N|\) (e.g., see [13]). Note that if \(A=M-N\) is an M-splitting, then \(\rho (M^{-1}N)<1\) (e.g., see [21]). It is known that an H-compatible splitting of an H-matrix is an H-splitting, but not vice versa, see [8, 13].
Lemma 1
[23] Let A be an H-matrix. Then \(|A^{-1}|\le \langle {A}\rangle ^{-1}\).
Lemma 2
[24] Let \(B\in {\mathbf {R}^{n\times n}}\) be a strictly diagonal dominant matrix. Then \(\forall C\in {\mathbf {R}^{n\times n}}\),
Lemma 3
[21] Let A be a Z-matrix. Then A is an M-matrix if and only if there exists a positive diagonal matrix D, such that AD is a strictly diagonal dominant matrix with positive diagonal entries.
3 Improved convergence theorems
Let \(A=M-N\) be a splitting of A, h be a positive constant, and \(\varOmega \) be a positive diagonal matrix. It is known from [17] and [18] that (1) can be changed to a equivalent fixed-point equations. The next lemma is a known result.
Lemma 4
[17] Let \(A=M-N\) be a splitting of the matrix \(A\in \mathbf {R}^{n\times n}\), and \(\varOmega \) be a positive diagonal matrix. For (1), the following statements hold true:
(1) If z is a solution of (1),then \(x=\frac{h}{2}(z-\varOmega ^{-1}f(z))\) satisfies the implicit fixed-point equation:
(2) If x satisfies (2), then \(z=\frac{1}{h}(|x|+x)\) is a solution of (1).
By (2), the modulus-based matrix splitting iteration method for solving (1) is given below:
Method 1
[17, 18] Let \(A=M-N\) be a splitting of A. Given an initial vector \(x^{(0)}\in \mathbf {R}^n\), for \(k=1,2,\cdots \) until the iteration sequence \(\{z^{(k)}\}_{k=1}^{+\infty }\subset \mathbf {R}^n\) is convergent, compute \(x^{(k)}\in \mathbf {R}^n\) by solving the linear system
and set
Here \(\varOmega \) is an \(n\times {n}\) positive diagonal matrix and h is a positive constant.
In Method 1, taking
we can obtain the modulus-based accelerated overrelaxation (MAOR) iteration method, which extends a series of relaxation modulus-based methods, such as the modulus-based successive overrelaxation (MSOR) iteration method, the modulus-based Gauss–Seidel (MGS) iteration method and the modulus-based Jacobi (MJ) iteration method when \(\alpha =\beta \), \(\alpha =\beta =1\) and \(\alpha =1, \beta =0\), respectively; see [17] for details.
To present the following discussion, we assume that
is differentiable, satisfying that \(0\le \frac{\mathrm {d}\varphi _i(z_i)}{\mathrm {d}z_i}\le \psi _i\), where \(\psi _i\in \mathbf {R}, i=1,2,\cdots ,n\). By the mean-value theorem, there exists \(\zeta _i^{(k)}\in \mathbf {R}\), such that
Let
Then we have
Lemma 5
Let \(\varOmega \) be a positive diagonal matrix, \(A\in {\mathbf {R}}^{n\times {n}}\) be an \(H_+\)-matrix and \(A=M-N\) be an H-splitting of A. Then \(\varOmega +M\) is an H-matrix and there exists a positive diagonal matrix D such that \((\langle M\rangle -|N|)D\) and \((\varOmega +\langle {M}\rangle )D\) are two strictly diagonal dominant matrices, and \((\langle {A}\rangle +\langle M\rangle -|N|)De>0\).
Proof
Since \(A=M-N\) is an H-splitting of A, \(\langle {M}\rangle -|N|\) and \(\langle {A}\rangle \) are two M-matrices. From Lemma 3, there exists a positive diagonal matrix D, such that \((\langle M\rangle -|N|)D\) is a strictly diagonal dominant matrix. For \(\langle {M}\rangle \ge \langle {M}\rangle -|N|\), \((\varOmega +\langle {M}\rangle )D\) is strictly diagonal dominant too. Since
\((\langle {A}\rangle +\langle M\rangle -|N|)D\) is also a strictly diagonal dominant matrix, and then \((\langle {A}\rangle +\langle M\rangle -|N|)De>0\).
Theorem 3.1
Let A be an \(H_{+}\)-matrix, \(A=M-N\) be an H-splitting and (5) holds with \(\varPsi ^{(k)}\) and \(\varPsi \) given by (4). If \(\varOmega \ge D_M+\varPsi \), then the iteration sequence \(\{z^{(k)}\}_{k=1}^{+\infty }\) generated by Method 1 converges to the unique solution \(z^{*}\in \mathbf {R}^{n}\) of (1) for any initial vector \(x^{(0)}\in \mathbf {R}^{n}\).
Proof
Let \(z^{*}\) be a solution of (1). Then we have \(x^{*} = \frac{h}{2} (z^{*} - \varOmega ^{-1}f(z^{*}))\), leading to
To prove \(\lim \limits _{k\rightarrow +\infty } {z^{(k)}}= z^{*}\), we need only to prove \(\lim \limits _{k\rightarrow +\infty } {x^{(k)}}= x^{*}\). By Lemma 5, \(\varOmega +M\) is a H-matrix. With (3), (6) and Lemma 1, we have
where
If \(\varOmega \ge D_M+\varPsi \), we have
Since \(A=M-N\) is an H-splitting, \(\langle M\rangle -|N|\) is an M-matrix. we easily have that \(\tilde{M}_1\) is an M-matrix too. Obviously, \(\tilde{M}_1-\tilde{N}_1\) is a Z-matrix. Hence by (8), \(\tilde{M}_1-\tilde{N}_1\) is an M-matrix. Together with that \(\tilde{M}\) is an M-matrix and \(\tilde{N}_1\ge 0\), we have that \(\tilde{M}-\tilde{N}\) is an M-splitting. Then \(\rho (\mathcal {L}_1)<1\), which implies that \(\lim \limits _{k\rightarrow +\infty } {x^{(k)}}= x^{*}\). \(\square \)
Let \(\alpha , \beta \) be the relaxation parameters used in MAOR. Since \(M=\frac{1}{\alpha }(D_A-\beta L_A)\), obviously, we have the next corollary.
Corollary 1
With the same notations and assumptions as in Theorem 3.1, let \(\alpha , \beta \) be the relaxation parameters in MAOR. If \(0<\beta \le \alpha \le 1\) and \(\varOmega \ge \frac{1}{\alpha }D_A+\varPsi \), the iteration sequence \(\{z^{(k)}\}_{k=1}^{+\infty }\) generated by MAOR converges to the unique solution \(z^{*}\in \mathbf {R}^{n}\) of (1) for any initial vector \(x^{(0)}\in \mathbf {R}^{n}\).
Remark 1
Clearly, the assumption that \(A=M-N\) is an H-splitting in Theorem 3.1 and Corollary 1, is weaker than the one in Theorem 4.3 of [17], where such splitting is assumed to be an H-compatible splitting.
Next we give another convergence theorem which provided a larger convergence domain than that in [17].
Theorem 3.2
Let A be an \(H_{+}\)-matrix, \(A=M-N\) be an H-splitting of A and (5) hold with \(\varPsi ^{(k)}\) and \(\varPsi \) given by (4). Then the iteration sequence \(\{z^{(k)}\}_{k=1}^{+\infty }\) generated by Method 1 converges to the unique solution \(z^{*}\in \mathbf {R}^{n}\) of (1) for any initial vector \(x^{(0)}\in \mathbf {R}^{n}\) provided that \(\varOmega \) satisfies one of the following conditions:
-
(I)
$$\begin{aligned} \varOmega \ge D_A+\varPsi ; \end{aligned}$$
-
(II)
$$\begin{aligned} \left[ \frac{1}{2}(|A|-\langle M\rangle +|N|)+\varPsi \right] De<\varOmega De\le (D_A+\min \limits _{1\le i\le n}{\psi _i}I)De, \end{aligned}$$(9)
where D is given by Lemma 5.
Proof
By (7), we have
where
Case (I) If \(\varOmega \ge D_A+\varPsi \), we have
Case (II) If \(\left[ \frac{1}{2}(|A|-\langle M\rangle +|N|)+\varPsi \right] De<\varOmega De\le (D_A+\min \limits _{1\le i\le n}{\psi _i}I)De\), we have
Summarizing Case (I) and (II), by (10), we have \(\rho (\mathcal {L}_2)\le ||D^{-1}\mathcal {L}_2D||<1\). \(\square \)
Remark 2
For MAOR, since \(M=\frac{1}{\alpha }(D_A-\beta L_A)\), we have \(D_M\ge D_A\). Hence the convergence domain in Theorem 3.2 is larger than that in Theorem 4.4 of [17].
4 Numerical examples
In this section, we give a numerical example to show the advantages of the new convergence theorems. All the computations were run by MATLAB R2016a on an Intel(R) Core(TM), where the CPU is 2.50 GHz and the memory is 4.00 GB.
In the following numerical implementations, all initial vectors are chosen to be \(x^{(0)}=e\) and all iterations are terminated once
where the minimum is taken componentwise.
Example 1
[18, 19, 25] Consider the problem arises from the discretization of the boundary problems. Let \(\mathcal {D}=(0,1)\times (0,1)\) and function g satisfy \(g(0,y)=y(1-y), g(x,y)=0\) on \(y=0, y=1\) or \(x=1\). Find u such that
where f(u, x, y) is continuously differentiable and \(\frac{\partial f}{\partial u}\ge 0\) on \(\bar{\mathcal {D}}\times \{u:u\ge 0\}\).
By discreting the problem using the five-point difference scheme with mesh-step size \(h=\frac{1}{2^\varsigma }\), we can get the nonlinear complementarity problem (1). More concretely, the matrix A is given by the block tridiagonal matrix
with \(S=\mathrm {tridiag}(-1,4,-1)\in \mathbf {R}^{m\times m}\) and \(I\in \mathbf {R}^{m\times m}\) is the identity matrix, where \(n=m^2\) and \(m=\frac{1}{h}-1\).
Clearly, A is a symmetry positive definite \(H_+\)-matrix. Let f(u, x, y) be \(u^2, u-sinu, ln(1+x)\) and arctanu, respectively. If we take \(\varPsi =2I\), it is easy to see that (5) holds. We present two experiments with different parameters.
Experiment (I) Take \(\varOmega =D_A+2I\). Let \(\varsigma =8\) and \(\varsigma =9\), respectively. Consider the splitting \(A=M_1-N_1\), where
Experiment (II) Let \(\varOmega =D_A\) and \(\varOmega =D_A-0.9I\), respectively. Take \(\varsigma =9\) and consider the MSOR (\(\alpha =1.2\)).
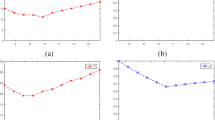
All numerical results are shown in Table 1, where Method 1 converges for all cases. The number of iteration steps is denoted by ‘IT’ and the elapsed CPU time in seconds is denoted by ‘CPU’.
In Experiment (I), since \(\langle M_1\rangle -|N_1|\ne \langle A\rangle \), the splitting (11) is not an H-compatible splitting, which leads to that the convergence results of Method 1 in [17] cannot be used here. On the other hand, for \(\langle M_1\rangle -|N_1|\) is an M-matrix, the splitting (11) is an H-splitting. The results of Experiment (I) show the advantage of Theorem 3.1.
In Experiment (II), \(\varOmega =D_A\) and \(\varOmega =D_A-0.9I\) are in the convergence range (9), which is not the convergence condition of Theorem 4.4 of [17]. The results of Experiment (II) also show the advantage of Theorem 3.2.
5 Conclusion
Theorems 3.1 and 3.2 give the convergence theories of modulus-based matrix splitting iteration methods for NCP(f) under the weaker condition that \(A=M-N\) is an H-splitting. Since an H-splitting of an H-matrix is not necessarily an H-compatible splitting, we have more choices for the splitting \(A=M-N\) which makes the modulus-based matrix splitting iteration methods converge than [17]. Furthermore, comparing to the convergence domain in [17], a larger one is given by Theorems 3.2. Therefore, our convergence theories extend the scope of modulus-based matrix splitting iteration methods for NCP(f) in applications.
References
Murty, K.G.: Linear Complementarity, Linear and Nonlinear Programming. Heldermann Verlag, Berlin (1988)
Cottle, R.W., Pang, J.-S., Stone, R.E.: The Linear Complementarity Problem. Academic, SanDiego (1992)
Bai, Z.Z.: Modulus-based matrix splitting iteration methods for linear complementarity problems. Numer. Linear Algebra 17, 917–933 (2010)
Bai, Z.-Z., Zhang, L.-L.: Modulus-based synchronous multisplitting iteration methods for linear complementarity problems. Numer. Linear Algebra 20, 425–439 (2013)
Bai, Z.-Z., Zhang, L.-L.: Modulus-based synchronous two-stage multisplitting iteration methods for linear complementarity problems. Numer. Algorithms 62, 59–77 (2013)
Li, W.: A general modulus-based matrix splitting method for linear complementarity problems of \(H\)- matrices. Appl. Math. Lett. 26, 1159–1164 (2013)
Li, W., Zheng, H.: A preconditioned modulus-based iteration method for solving linear complementarity problems of \(H\)-matrices. Linear Multilinear Algebra 64, 1390–1403 (2016)
Liu, S.-M., Zheng, H., Li, W.: A general accelerated modulus-based matrix splitting iteration method for solving linear complementarity problems. CALCOLO 53, 189–199 (2016)
Zhang, L.-L.: Two-step modulus based matrix splitting iteration for linear complementarity problems. Numer. Algorithms 57, 83–99 (2011)
Zhang, L.-L.: Two-stage multisplitting iteration methods using modulus-based matrix splitting as inner iteration for linear complementarity problems. J. Optimiz. Theory Appl. 160, 189–203 (2014)
Zhang, L.-L.: Two-step modulus-based synchronous multisplitting iteration methods for linear complementarity problems. J. Comput. Math. 33, 100–112 (2015)
Zheng, H., Li, W., Vong, S.: A relaxation modulus-based matrix splitting iteration method for solving linear complementarity problems. Numer. Algorithms 74, 137–152 (2017)
Zhang, L.-L., Ren, Z.-R.: Improved convergence theorems of modulus-based matrix splitting iteration methods for linear complementarity problems. Appl. Math. Lett. 26, 638–642 (2013)
Zheng, N., Yin, J.-F.: Accelerated modulus-based matrix splitting iteration methods for linear complementarity problems. Numer. Algorithms 64, 245–262 (2013)
Ferris, M.C., Pang, J.-S.: Engineering and economic applications of complementarity problems. SIAM Rev. 39, 669–713 (1997)
Harker, P.T., Pang, J.-S.: Finite-dimensional variational inequality and nonlinear complementarity problems: a survey of theory, algorithms and applications. Math. Program. 48, 161–220 (1990)
Xia, Z.-C., Li, C.-L.: Modulus-based matrix splitting iteration methods for a class of nonlinear complementarity problem. Appl. Math. Comput. 271, 34–42 (2015)
Huang, N., Ma, C.-F.: The modulus-based matrix splitting algorithms for a class of weakly nonlinear complementarity problems. Numer. Linear Algebra 23, 558–569 (2016)
Ma, C.-F., Huang, N.: Modified modulus-based matrix splitting algorithms for aclass of weakly nondifferentiable nonlinear complementarity problems. Appl. Numer. Math. 108, 116–124 (2016)
Xie, S.-L., Xu, H.-R., Zeng, J.P.: Two-step modulus-based matrix splitting iteration method for a class of nonlinear complementarity problems. Linear Algebra Appl. 494, 1–10 (2016)
Berman, A., Plemmons, R.J.: Nonnegative Matrix in the Mathematical Sciences. SIAM Publisher, Philadelphia (1994)
Bai, Z.-Z.: On the convergence of the multisplitting methods for the linear complementarity problem. SIAM J. Matrix Anal. A 21, 67–78 (1999)
Frommer, A., Mayer, G.: Convergence of relaxed parallel multisplitting methods. Linear Algebra Appl. 119, 141–152 (1989)
Hu, J.-G.: Estimates of \( {B^{-1}C} {B^{-1}C}_\infty \) and their applications. Math. Numer. Sin. 4, 272–282 (1982)
Sun, Z., Zeng, J.-P.: A monotone semismooth Newton type method for a class of complementarity problems. J. Comput. Appl. Math. 235, 1261–1274 (2011)
Acknowledgements
The author would like to thank the reviewers for their helpful suggestions. The work was supported by the National Natural Science Foundation of China (Grant No. 11601340), the Opening Project of Guangdong High Performance Computing Society(Grant No. 2017060108), the Opening Project of Guangdong Provincial Engineering Technology Research Center for Data Sciences(Grant No. 2016KF11) and Science and Technology Planning Project of Shaoguan(Grant No. SHAOKE [2016]44/15).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Zheng, H. Improved convergence theorems of modulus-based matrix splitting iteration method for nonlinear complementarity problems of H-matrices. Calcolo 54, 1481–1490 (2017). https://doi.org/10.1007/s10092-017-0236-1
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10092-017-0236-1