
Abstract
A methodology for designing a tunnel support system according to the actual ground conditions and the critical behaviour types is analysed in this paper. The methodology is justified with the principles of the New Austrian Tunnelling Method that incorporates the top heading and bench method. The role of the geological material and its implication in tunnel design, reinforced with advances in site investigation methods, cannot be based solely on the development of the geotechnical classification systems and the consequent quantification of the rock masses. Support requirements for rock masses with equal classification ratings can be different. The procedure presented in this study cannot bypass the geological and/or in situ characteristics dictating or influencing the tunnel behaviour compared with a standardised classification that could miss the specifics and particularities of and around a tunnel section. The step-by-step procedure is applied in a tunnel excavated in tectonically disturbed heterogeneous flysch sediments in Serbia. The complex structure of these materials, resulting from their depositional and tectonic history that includes severe faulting and folding, presents a challenge to geologists and engineers. The possible ground types are evaluated, and then, combined with the factors of the tunnel geometry, the primary stress condition, and the water conditions, several behaviour types are considered. These classified behaviour types, followed by the suitable mechanical properties that are required for effective tunnel engineering design, are the basis for the numerical design of the appropriate primary support measures to achieve stable tunnel conditions. The twin-tube, two-lane highway tunnel was successfully constructed without significant problems.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
In recent decades, a rapid development in relatively all stages of geotechnical design can be discerned. Great progress has been made in analytical and computational methods. Nevertheless, the results may still involve errors and uncertainties when they are used without considering the actual failure mechanism of an excavated rock mass.
Nowadays, knowledge and understanding of the role of the geological material and its implication in design is reinforced with advances in site investigation methods, the development of the geotechnical classification systems and the consequent quantification of the rock masses. The rock mass rating (RMR) (Bieniawski 1973, 1976) and Q (Barton et al. 1974; Barton 1976) systems were developed in order to provide tunnel support estimates through a rating of rock masses (Zhang and Goh 2012). Later, the development of powerful microcomputers and user-friendly software prompted a demand for data related to required rock mass properties as input for numerical analysis or close form solutions for designing tunnels. The arrival of numerical techniques to tackle rock-support interaction and the development of ideas associated with the ground reaction curve concept allowed problems to be addressed well outside the ideal range for the application of various available tunnel support classification systems, such as RMR and Q. Experience gained from the early application of more sophisticated modelling suggested that there was good correspondence between guidelines from these classifications and modelling results and reality when rock-mass behaviour was relatively simple; for example, RMR values between 30 and 70 with moderate stress levels (Hoek and Marinos 2007) do not produce good results outside this range. Good replications and reasonable analysis results could be generated where the sliding and rotation of intact rock pieces essentially controlled the overall failure process, corresponding to an experience database on which the early classifications were built. Literally hundreds of kilometres of tunnels were successfully constructed on the sole basis of this application.
Consistently, however, it was found that the classifications were less reliable for predicting excavation behaviour in squeezing or swelling ground. Less reliable results were also obtained for more intact ground conditions where just a few clearly defined structural features controlled failures or where spalling, slabbing and/or rock-bursting were feasible under very high in situ stress conditions. Classifications have also been found to be difficult to apply for the design of sequentially installed temporary reinforcement or establishing the support required to control progressive failure in difficult tunnelling conditions. In such situations, excavation and installation of support are often needed to define step-by-step processes for tunnelling in advance by drill and blast or road header operations involving multi-shell top heading and benching. In such a system, an intricate sequence of excavation, face support, installation of rock bolts, steel sets and/or shotcrete, plus support of the top heading or partial shells while the bench is excavated, is required. Then, the completion of the lower sidewalls and the invert and the installation of the final concrete lining (if one is required) require segmental design.
Palmström (2005) made an attempt to examine classifying a broader range of block sizes than feasible using the rock quality designation (RQD)classification introduced by Deere (1964). Both RMR and the Q systems include and are heavily dependent upon RQD. Since RQD for most weak rock masses is essentially zero or meaningless and, beyond a certain block size at the other end of the competence scale, is always 100%, and as none of the existing systems seemed to cope well with this problem, it was clear that an alternative classification approach was necessary. It was decided that the required system should not include RQD but would place greater emphasis on basic geological observations of rock mass characteristics to better reflect the material, its structure and its geological history. Furthermore, it would be developed specifically for the estimation of rock mass properties rather than for estimating tunnel reinforcement and support. This new classification, which was considered more of an index of rock competence than a mechanical quality rating, was thus termed the GSI (geological strength index) (Hoek 1994). The Hoek and Brown failure criterion (Hoek et al. 2002) is closely connected to the geological strength Index (GSI), covering a wide range of geological conditions (Hoek et al. 1998; Marinos and Hoek 2000; Marinos 2007, 2017) affecting the quality of rock masses.
While it was appreciated that both RMR and Q were basically developed for estimating underground excavation support and therefore included some parameters not required for the estimation of rock mass properties, it was also considered that these specific parameters were better dealt with by means of full structural and effective stress analysis approaches rather than solely through classifications. The use of RMR without modification as the basis for rock mass property estimation was considered inappropriate, as incorporation of these parameters into the methodology would essentially double-count this impact.
It also became evident that both the RMR and Q systems were difficult to apply to rock masses of both extremely good and very poor quality (Palmström and Broch 2006). In particular, it was also noticed that the relationships between RMR and the constants m and s of the Hoek–Brown failure criterion began to break down for severely fractured and/or weak rock masses.
However, the contribution of the engineering geological information for safe and economical tunnelling cannot be simply presented solely by a rock mass classification value (e.g., RMR, Q, GSI or others). The current work argues that the classification ratings, if used, must be accompanied by an understanding of the actual rock mass behaviour in tunnelling. The behaviour in tunnelling may differ from one rock mass to another, even if they have the same classification rating in the same stress field and the same ground water conditions. An example of two rock masses with the same classification rating but different tunnel behaviour is presented in Fig. 1 (Marinos 2012). The two systems in Fig. 1 illustrate that the selection of the temporary support measures cannot be based solely on a classification rating (either GSI or RMR) but that it also requires an understanding of the tunnel failure mechanism. Hence, attention should be given to the evaluation of the failure mechanism that “fits” the rock mass after its excavation. Following the evaluation of the mechanism of failure, one can be more confident in using either the rating of the applied classification system (RMR, Q, GSI or others) or investigate the specific geological or in situ characteristics, “keys”, that govern the tunnel behaviour of the rock mass.

Example of two equally rated rock masses with the GSI or RMR system but with completely different behaviours in tunnelling (Marinos 2012). The selection of the temporary support measures should not be based silely on the classification ratings but also on the understanding of the tunnel failure mechanism, greatly dependant on the rock mass structure
After the identification of the failure mechanism, the suitable numerical analysis can be selected, the conditions can be more realistically modelled, and the principles of tunnel support can be more accurately considered. The proper and critical design parameters can also be selected, according to the principles of the failure mechanism. If the behaviour of the rock mass can be considered as isotropic and governed by induced stress, the tunnel engineer must be focused on rock mass parameters (e.g., GSI in Hoek–Brown transfer equations relating intact and rock mass properties with respect to GSI Hoek et al. 2002). On the other hand, if the principle behaviour type is gravity-controlled failures, the user must focus on parameters related to the discontinuities. If the rock mass is weak but also anisotropic (e.g., due to schistosity or well-defined bedding planes), both the rock mass parameters and the persisting joint properties must be considered (Fortsakis et al. 2012). Parameters of the geotechnical classification systems are reported here. Since most tunnel designs now involve numerical analyses, the question is whether to use rock mass parameters (shear strength of rock mass, cmass, φmass, Εmass, etc.) when the rock mass behaves isotopically or to include the discontinuity parameters (orientation, distribution, persistence, shear strength cjoint, φjoint) when the behaviour is controlled by the joints or influenced by the resulting anisotropy.
The case study presented as an example to demonstrate the applied methodology is the Przojna Padina tunnel in Serbia. It is located on the E-80 Highway, along the Belgrade–Niš-Dimitrovgrad section, the Dimitrovgrad bypass to the Bulgarian border crossing. The whole tunnel is located north of Dimitrovgrad. The tunnel includes two twin-tunnel tubes, with a total length of 350.00 m for the left branch and 326.37 m for the right branch. The tunnel overburden generally ranges from 4 m to nearly 40 m, while the axial distance of the two tunnel bores is approximately 28 m. The site investigation programme for the Przojna Padina tunnel involved detailed field work, and the results of the investigation programmes from the previous studies were evaluated.
The tunnel is excavated in tectonically disturbed heterogeneous rock masses of flysch. The methodology is demonstrated for a geomaterial that presents challenges to geologists and engineers due to its complex structure, which is due to its depositional and tectonic history. Flysch, characterised mainly by rhythmic alternations of sandstone and pelitic layers (siltstones, silty or clayey shales) may be intensively folded and heavily sheared, to the point where the original structure of the rock mass is no longer recognisable, and the overall rock mass may be highly heterogeneous and often anisotropic. This tectonic deformation, when present, drastically degrades the quality of the rock mass. Thus, flysch is characterised by diverse heterogeneity, with members that have low strength and tectonically disturbed structures. In the examined case, the flysch is composed of several ground types, from moderately disturbed to folded and sheared structures.
The variety of geological conditions, in areas of both moderate and intense tectonism, provided significant amounts of information regarding the engineering geological conditions and geotechnical behaviour of several flysch rock mass types. Flysch, depending on its type, can present a variety of behaviours: it can be stable even under a noticeable overburden, undergo wedge sliding and wider chimney type failures, or deform even under low to medium overburdens. The behaviour of flysch is controlled by its main geotechnical characteristics, considering the in situ stress and groundwater conditions.
This case study strictly follows the presented design methodology in a difficult-to-describe lithological unit: (1) to assess the geological and engineering geological conditions along the tunnel, (2) to evaluate all the possible ground types within a single formation along the tunnel bores, (3) to assign the geotechnical parameters of the probable ground profiles, (4) to consider the tunnel failures that are likely to occur (behaviour types), and (5) to present the designed primary support measures, in order to contain and control the probable failure modes.
Tunnel design: incorporating the engineering geological characterisation and behaviour types
Rock mass behaviour evaluation in tunnelling and its connection to the design process has been the subject of significant research. Goricki et al. (2004), Schubert (2004), Poschl and Kleberger (2004) and Potsch et al. (2004) have studied rock mass behaviour from the design and construction of Alpine tunnels; also, Palmstrom and Stille (2007) have studied rock mass behaviour from other tunnel types. A flowchart in Fig. 2, from Schubert et al. (2003), presents this design methodology. As shown in this flowchart, the fundamental link between the rock mass models and the excavation and support classes is the definition of the tunnel behaviour type. The assessment of this design methodology, highlighting the definition of ground types and the prediction of their tunnel behaviour, is the basic outcome of this work. Tunnel behaviour types have been described by Terzaghi (1946) and Schubert et al. (2003), but have also been configured by Marinos (2012) from the experiences of constructing the 62 Egnatia Highway tunnels and from other cases in Greece.

Basic process for determining excavation and support measures based on the behaviour of the ground types (from the Austrian Society of Geomechanics, 2010 v.2.1: Guideline for the geomechanical design of underground structures for conventional tunnelling, Salzburg)
The five general steps to draw up the geotechnical design, beginning with the determination of the ground/rock mass types and ending with the definition of excavation classes. The procedure described below has been adopted for the design of the support categories of the examined case study.
-
Step 1 – Determination of ground types (GTs)
Concerning the basic geologic architecture, the key relevant geotechnical parameters are defined for each rock type. Then, ground types (GTs) are defined according to their specific in situ engineering geological characteristics, or “keys”, that govern the tunnel behaviour of the rock mass and the appropriate design parameters. The number of ground types considered depends on the project-specific geological conditions and on the stage of the design process.
-
Step 2 – Determination of ground/rock mass behaviour types (BTs)
The second step involves evaluating the potential ground behaviour by considering each ground type and local factors such as the relative orientation of the discontinuities relevant to the excavation, ground water conditions, stress conditions, etc. This process results in the definition of project-specific behaviour types.
-
Step 3 – Determination of the excavation and support
Based on the defined project-specific behaviour types, different excavation and support measures are evaluated, and the acceptable methods are determined. The system behaviour is a result of the interaction between the ground behaviour and the selected excavation and support schemes. Once the acceptable excavation and support methods have been determined, both risk and economic analyses should be performed for a suitable assessment.
-
Step 4 – Geotechnical report and baseline construction plan
Based on steps 1–3, the alignment is divided into “homogeneous” regions with similar excavation and support requirements. The excavation and support methods available for each region, including the limits and criteria for the possible variations or modifications on a baseline construction plan, are outlined in a geotechnical report and/or baseline construction plan.
-
Step 5 – Determination of excavation classes
In the final step of the design process, the geotechnical design must be translated into a cost and time estimation. Excavation classes are defined based on the evaluation of the excavation and support measures.
Ground type determination
General
The estimation of the tunnel behaviour and the design of the support measures should be based on a detailed ground characterisation. Compared with a standardised classification, this detailed ground characterisation cannot bypass the geological and in situ characteristics dictating or influencing the tunnel behaviour.
For the definition of the GTs in rock masses, the following “key parameters” should be defined:
-
Lithology
-
Uniaxial compression strength of the intact rock
-
Spacing of relevant discontinuities
-
Properties of relevant discontinuities (roughness, waviness, persistence and filling).
Based on these key parameters, the following “determined parameters” are designated:
-
GSI
-
Rock mass strength (UCS intact - σci) cohesion, friction angle, and Young’s modulus (E))
Finally, the following “additional parameters” are given to complete the information:
-
Specific weight
-
Hoek petrographic constant (mi)
-
Poisson’s ratio
When the behaviour of the rock mass can be considered isotropic and is governed by stress-induced failures, the design is focused on the rock mass parameters. These parameters can be obtained from the use of the Hoek–Brown failure criterion (Hoek et al. 2002). Basic inputs of this criterion, apart from the GSI value (Marinos and Hoek 2000; Marinos 2017), are the uniaxial compressive strength (σci) and the material constant (mi) related to the frictional properties of the intact rock. Furthermore, to calculate the rock mass deformation modulus, Erm, the equation of Hoek and Diederichs (2006) can be used with minor adaptations.
Przojna Padina case study
Geological setting
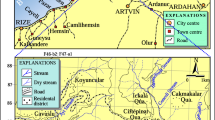
Geomorphologically, the Przojna Padina tunnel area is in the hills northwest of Dimitrovgrad, along the right side of the valley of the Nišava River. The slopes are generally steep in the western part of the tunnel and gentler in the eastern part. The terrain is partly covered with meadows and pastures. The bedrock in the wider area of the tunnel consists of flysch sediments: specifically, sandstone beds with siltstone intercalations (Fig. 3). Different types of bedrock outcrop at the mountain ridge north of Dimitrovgrad (limestone and sandstone) and in the urban area of Dimitrovgrad (sandstone and limestone). The boundary between the two lithological formations is a tectonic fault running southeast–northwest (SE–NW), which can be traced for several tens of kilometres. These SE–NW-oriented faults are found in the wider area of the tunnel; they are approximately perpendicular to the tunnel and have widths of approximately 4–5 m. One of these tectonic surfaces is located perpendicular to the exit portal and generally determines the boundary between the flysch sediments and the Quaternary and Neogene deposits. These faults, together with SW–NE faults, have affected the rock mass quality in some zones. Sandstones with thin alternations of siltstones mainly persist in the flysch deposits in the tunnel area. The flysch formation mainly outcrops west of the tunnel and along the tunnel drive, but they also appear along the eastern open cuts. The Przojna Padina tunnel is located completely within the sandstone beds and siltstone intercalations.

Location and geological map of the regional area of the examined case study, the Przojna Padina tunnel (Pirot Geological Sheet, 1:100000, Osnovna Geoloska Karta SFRJ) (K21 flysch formations of sandstone and siltstone intercalations)
The geological formation that prevails in the Przojna Padina tunnel is a flysch of medium-bedded sandstones with thin siltstone intercalations. A higher presence of siltstones is observed in fault or shear zones. Limestone masses may be occasionally detected inside the flysch strata but in thin zones. It must be noted that there are areas where the sandstones are strongly calcitic due to the high presence of the limestones in the area.
Bedding is generally dipping towards the east–northeast, hence, parallel to the tunnel direction. This geometry favours local planar instabilities in the tunnel face if the excavation is progressed from east to west. In general, the formation is moderately fractured, but, along fault and shear zones, it is sheared and heavily folded. These zones are found perpendicular to the tunnel direction, since they have NW–SE and NE–SW directions. These faults disturb the rock mass in a 3- to 5-m zone. In addition, smaller shear zones are also present with less disturbance. The significance of the calcitic presence to the formations lies in not only the higher intact rock strength that is developed but also the dissolution phenomena inside the sandstone. This karstification is observed along some fault planes with insignificant length and without filling. This is reasonable due to the heterogeneous nature of the flysch formation (alternations of calcitic and non-calcitic–pelitic materials). The geological conditions along a section of the tunnel are illustrated in Fig. 4.

Geological conditions along the Przojna Padina tunnel
There is no significant evidence of water flow along the flysch sediments, and only some seepage or occasional dripping flow is observed; this is due to the heterogeneous nature of the rock mass and the presence of the siltstone. Therefore, the groundwater cannot flow continuously with a uniform level within the entire tunnel cover and along its length. The discharge flows in the direction of the Nišava River. The sandstones are fractured, and, close to the surface, these discontinuities may be open. In this case, water can infiltrate and run throughout the joints. In addition, due to groundwater flow inside the sandstones, a local dissolution phenomenon occurs along some fault zones in the calcitic sandstones or limestones. Nevertheless, water cannot flow significantly deeply into the rock mass due to the impermeable interlaying of the siltstone beds; given the site observations and the hydrogeological assessment, the groundwater level was expected to be below the tunnel level. However, some low seepage may occur from the sandstone beds due to the blockage of the underlying impermeable siltstone beds. In this case, water is trapped inside the rock mass and pressurises the blocks.
Ground type definition
The rock mass quality of the flysch sediments ranges from blocky to very blocky sandstones and folded–disturbed to foliated intercalations of sandstones and siltstones. To reasonably estimate the strength parameters of the rock masses, the Hoek–Brown failure criterion (Hoek et al. 2002), linked to the GSI, was used.
The rock mass of the Przojna Padina tunnel in the sequence of flysch along the alignment is blocky (I), very blocky (II), folded–disturbed (III) or sheared (IV) (Fig. 5). To investigate the properties of the flysch, the GSI system for tectonically disturbed heterogeneous rock masses was used (Marinos et al. 2011; Marinos 2017). The classification of flysch formations into 4 groups (GT1–GT4) is based according to their tectonic disturbance and sandstone–siltstone proportions (Fig. 5), and a certain range of GSI values for every rock mass type was proposed (Fig. 6). In addition, it is necessary to consider values of the “intact” rock properties, σci and mi, for the heterogeneous rock mass as a single entity. A “weighted average” of the intact strength properties of the strong and weak layers was proposed by Marinos et al. (2011) and Marinos (2017). The results from unconfined compressive strength (σci) tests show that the sandstones in the Przojna Padina tunnel have strengths of approximately 30 MPa. No tests were performed on the thin siltstone members, but it is estimated that the strength is approximately 15 MPa (Marinos 2017) and approximately 5–10 MPa when sheared. In some cases, where the sandstone is calcitic (mainly in the entrance area of the tunnel), the intact rock strength is higher.

Definition of ground types (description and appearance) along the tunnel and equivalent GSI values

The properties of the rock joints and bedding planes were estimated based on the macroscopic observations of the material in the field, since no direct shear tests were performed. The bedding planes in the sandstones have generally rough to smooth roughnesses (JRC = 6–10), but, when they are interlayered with siltstones or they are sheared, they have smooth to slickensided roughnesses (JRC = 4–8). The other joints in the sandstones present stronger properties since they are rough to smooth, while their apertures are generally tight without infilling material. The bedding planes in the siltstones were considered smooth to slickensided, since the rock masses are tectonically disturbed in the regional area. There is no visible sign of weathering of the rock material at joint walls. The persistence of the bedding planes is very high, and the joints are approximately 2–4 m long. Regarding the discontinuity spacing, the bedding planes have moderate to wide spacing (0.4–0.8 m) and the joints have moderate spacing (0.2–0.6 m). In general, the angle of fiction of the sandstone joints is assumed to be approximately 30°–35°. However, near the east tunnel portal, the rock joints have weaker properties due to the siltstone interlayers and shearing. The shear strength of the rock joints is thus represented by the following set of parameters: φ = 20°–25° and c = 30–70 kPa.
Along the shear zones and faults, discontinuity planes have clayey coatings and are slippery. However, these zones are thin (1–2 mm) and are tight to partly open. Along faults and sheared clayey zones, the angle of friction is considered to be 20°, and the cohesion is 0–20 kPa. The typical geotechnical properties of the defined ground types, for the in situ conditions, are presented in Fig. 7.

Typical geotechnical properties (key and determined parameters) per ground type (GT)
Behaviour types for support classes
General
Following the assessment of the rock mass behaviour in tunnelling, a temporary support system can be designed. The design of the temporary support categories is composed of two stages: the selection of the proper support elements and their detailed analysis. The classified behaviour types are the basis for the design of suitable measures (excavation and primary support) to achieve stable tunnel conditions. The choice of support should be based equally on experience and geotechnical information and on the analytical solutions, but must be verified or revised during construction, guided by the monitoring of the tunnel.
The Przojna Padina case study
The ground behaviour refers to the determined behaviour of the rock mass due to the excavation of the tunnel without any support measures. To determine the ground behaviour, the ground types are combined, as already discussed, with the predicted ground conditions that are affected by factors such as the tunnel geometry, primary stress condition, water condition and the orientation of the discontinuities.
Factors of influence
Tunnel geometry
The tunnel has a horseshoe-shape with an excavation span of 11.5 m and a height of approximately 8.7 m. It was excavated according to the principles of the New Austrian Tunnelling Method (NATM), using the top heading and bench method.
Primary stress condition
To determine the primary stress condition, the overburden stress is assumed to be a principal stress component. The maximum overburden is 35 m, and the weight of the ground is assumed to be approximately 25–26 kN/m3. These values are used to calculate the vertical stress component. The factor K0 for the calculation of the horizontal stress components is estimated as K0 = 0.60–0.80, depending on the GT. For example, the estimated K0 = 0.8 for GT1/GT2, K0 = 0.70 for GT3 and K0 = 0.6 for GT4. The value K0 = 1 has been considered for the rock mass in the entrance portal area, where the slope tunnelling conditions are formed. The estimated values given above are in a reasonable range for the actual ground conditions, including the topographical influence.
Water condition
Two issues concerning the water condition are important for the prediction of the geomechanical behaviour of the ground. The first one is the existence of water in a sufficient quantity to weaken the rock mass and infill the discontinuities so that the rock mass properties change, i.e., shear strength. The size of possible the weakened area is directly related to the ground type. The second issue is the pressure of the ground water. Water in joints under high pressure can cause failure in the rock mass surrounding the excavation.
In sections of blocky rock mass, dripping conditions and singular water inflows, with rapid inflows of up to several litres per second and long-term inflows of a few litres per minute, may be expected. Here, the water pressure was generally assumed to be quite low, and the piezometric line was generally assumed to be mostly under the tunnel. In sections of weak faulted rocks (shear zones), dry to damp conditions are expected.
Orientation of the influencing discontinuities
The variation in the orientation of the important discontinuities is an essential parameter for the determination of the mode of failure. This parameter defines the geometry of the pre-existing failure planes for gravity-induced failure of blocks as well as for stress-induced failure of the rock mass surrounding the tunnel. For the different modes of failure, different orientations may be favourable or not.
Ground behaviour types
As discussed, flysch can be stable, undergo wedge sliding and wider chimney type failures, or can develop shear failure even under low overburden. Its behaviour is controlled by its main geotechnical characteristics as well as by the in situ stress and groundwater conditions. Generally, the behaviour of the flysch formations during tunnelling depends on three major parameters: (1) the structure, with the degree of rock mass disturbance and the condition of the discontinuities that may enhance a shear failure, (2) the intact strength of the dominant rock type, and (3) the depth of the tunnel. The expected behaviour types (stable, wedge failure, chimney type failure, ravelling ground, shear failures, and squeezing ground) can be illustrated in a tunnel behaviour chart (TBC) (Marinos 2014). In Fig. 8, the main failure mechanism for every ground type (GT1–GT4) is projected in the tunnel behaviour chart (TBC), from Marinos (2012), with projections of the principal failure mechanisms for the assessed ground types (GT1 to GT4).

Tunnel behaviour chart (TBC) from Marinos 2012, with projections of the principal failure mechanisms for the assessed ground types in this study (GT1–GT4)
Based on the geological model, all the predicted combinations of the ground types and influencing factors were investigated. The result is a description of the behaviour of the ground caused by tunnel excavation without support. All the relevant data (ground types and influencing factors), including the resulting rock mass behaviour, typical failure modes and accompanying information, are presented systematically in tables. The resulting rock mass behaviour for every ground type and the accompanying detailed information are presented in Fig. 9.

Resulting rock mass behaviour for every ground type, and the accompanying information
Primary support measures
In geotechnical engineering, the ground, which is the working material, has no predetermined and defined properties. Local variations in the ground are often unpredictable, and the anticipated ground behaviour can differ from the estimated or calculated behaviour. Therefore, it is necessary to base geotechnical design on a frame of predictions and to be prepared to adjust the design of the construction as work proceeds. It is necessary to observe/monitor site operations to check the initial design assumptions, to observe and define any variations, and to act in case of continuous variations. Consequently, observations are an essential part of the verification and the evaluation of the design. The observational method (OM) is a process that takes into consideration the inherent limitations of information and knowledge and manages the associated risk. Deviations from the expected behaviour are carefully monitored, observed and evaluated, and, if suitable, a course of action for which provisions have already been made is adopted. As a result of controlling and mitigating the unforeseen risks, materials can be saved and construction time can be reduced.
Peck discussed the OM in his Rankine Lecture in 1969 (Peck 1969). The OM is most extensively used in modern geotechnical construction for tunnelling with the NATM, as described in the Austrian guidelines for the geotechnical design for underground structures in conventional tunnelling.
The Przojna Padina tunnel has been constructed with conventional excavation techniques in accordance with the principles of the NATM. Two tunnel linings were installed: (1) a primary lining consisting of shotcrete, generally reinforced with wire mesh, lattice girder sets or HEB steel arches and rock bolts, all installed round by round immediately after the tunnel excavation, and (2) an inner (final) lining constructed of reinforced concrete. The inner lining was designed to sustain all internal and external forces without, in this case, considering the bearing capacity of the primary lining.
The excavation was carried out by either drill and blast or hydraulic hammer and/or tunnel backhoe excavator, with a subdivision of the tunnel cross-section into the top heading, with temporary invert (where and if required) and bench/permanent invert (where required). To increase the face stability, the tunnel face was supported according to the geological situation. Four support categories are provided for the primary lining, based on the ground behaviour types. The correlation between the ground types, behaviour types and support categories is given in Table 1.
Based on the predicted behaviour types, the excavation areas, construction sequence and primary support measures were defined in the design phase to achieve stable tunnelling conditions until the inner lining was installed. The excavation and support measures, based on analytical and empirical methods, are presented in Table 2.
Numerical analysis of primary lining
Verification of the tunnel design was completed using the software code PHASE2 (Rocscience). PHASE2 is a finite element code, which allows numerical analysis of all kinds of tunnel and underground engineering in two dimensions. In each support category, the finite element calculations are performed for the section with the highest overburden, H = 35 m. The evaluations of the primary support measures are based on the assumption that these measures will undertake all the loads. The resulting loads would be successfully undertaken by early placing of proper support measures or a combination of measures in order to reduce the displacements to desirable–acceptable limits. It is important to stress that it is considered that the “actual” and “final” dimensioning of the primary support takes place during construction. The calculations of the design offer a better understanding of the problem requirements and an assessment of the role that different parameters play in tunnel stability. In this way, during construction, there is a list of possible situations and ways of addressing them.
The analyses used the following parameters:
-
Gravitational stress field with σv = g × h, where g = 25-26 kN/m3 and h = height of the overburden (max 35 m).
-
The coefficient k0 = σν/σh, was taken in a frame from 0.60 to 1.00.
-
The Mohr–Coulomb failure criterion was used.
-
The modelling stages followed the proposed construction practice, i.e., excavation and application of support measures first on the top heading of the left bore and then excavation and support measures on the top heading of the right bore, and the same sequence followed for the benches.
The Hoek–-Brown failure criterion can sufficiently describe the strength of rock masses, based on the characteristics of the intact rock and the rock mass fracturing state. Hence, it was used to evaluate the geotechnical parameters; thus, the inputs GSI, σci and mi were assessed. However, the Mohr–Coulomb failure criterion was used in the numerical analysis, since it is a widespread failure criterion in geotechnical engineering, incorporated in almost every relevant software. A serious problem is the conversion of the Hoek–Brown parameters (GSI, σci, mi, D) to the equivalent Mohr–Coulomb ones (c, φ of the rock mass) and also the estimation of the divergence of the results from these two approaches, since the transformation of a non-linear criterion to a linear one can never be exact. Since the Hoek–Brown failure criterion describes a non-linear equation, the determination of the equivalent Mohr–Coulomb parameters is really based on the transformation of a curve to an equivalent straight line for the range of parameters that are involved in every different problem. This approach can be achieved either by a tangent line to a certain point of the curve (this method leads to good results for the certain point but to large deviations for the adjacent part of the curve), or by adjusting a straight line to a specific part of the curve (this method provides sufficient results for the particular length and the equivalent stress limits). Given that tunnel problems demonstrate significant changes of the stress field around the excavation, the second approach is considered more appropriate (Fortsakis et al. 2011)
Behaviour analyses of the two tunnel bores were conducted using construction phases and the installation of primary support measures in the stages. Stability analyses were conducted for the different combinations of mechanical properties. The data presented in Table 3 refer to the worst possible parameters (Fig. 7).
The analyses produced the following results:
-
The excavation and primary support measures in all categories lead to stable tunnelling conditions.
-
The tunnelling works for the right bore cause (influence) deformation changes on the left bore, on the order of 15–20%, only in the case of the entrance portal and an assumed value of ko = 1. In all other cases, the influence is minor, as expected for such quality of rock mass.
-
All cases show points were the shear strength of the ground is exceeded (shear failure). The extent of the ground failure zone is as follows:
-
2–3 m at the sidewalls and 3 m at the roof for the SC A,
-
1–1.5 m at the left sidewall of the left bore and 2.5 m at the left side (towards pillar) of the right bore for the SC B,
-
1.5 m at the left sidewall and 0.5 m at the right sidewall of the both bores for the SC C,
-
1 m at the sidewalls of the left bore and over the forepoling zone up to the surface of the right bore for the entrance section with ko = 0.60, where SC C is considered for the left bore and SC D for the right one,
-
1 m at the bench sidewalls of the left bore, 1.5 m at the left bench sidewall of the right bore, 2.5 m at the right bench sidewall of the right bore and over the forepoling zone up to the surface of the right bore for the entrance section with ko = 1.00, where SC C is considered for the left bore and SC D for the right bore.
-
-
The values for the effective normal stress, σn, range between 3400 and 6500 kPa (peak values). Thus, the stresses stay well within the capacity of the shotcrete lining, and sufficient safety factors for the primary support shell are achieved.
-
In all cases, there are no bolt failures. The axial forces developing on the bolts are lower than their capacity.
Verification of system behaviour
By monitoring the behaviour of the excavated and supported sections, compliance with the requirements and criteria defined in the geotechnical safety management plan (alert limits) is verified. When differences between the observed and predicted behaviour occur, the parameters and criteria used during excavation for the determination of GT and the excavation and support have to be reviewed. When the displacements or support utilisation are higher than predicted, a detailed investigation into the reasons for the different system behaviour has to be conducted; if required, improvement measures (like increasing the support) have to be applied. Even when the system behaviour is more favourable than expected, the underlying reasons still need to be analysed, and the findings need to be used to better calibrate the geotechnical model as well as the delimitating criteria and parameters.
The decision basis for the application of the support categories on site is the tunnel design in combination with additional information and observations gained during construction. The actual ground conditions have to be evaluated on-site, based on observations of the encountered ground, its behaviour during excavation and monitoring results of the system behaviour.
Whenever the highly time-dependent behaviour is different from the predicted system behaviour or the “normal” behaviour of the excavation or the primary lining, all necessary measures have to be taken to allow safe and stable tunnelling conditions. Table 4 shows the most important hazards, alert criteria and counter measures. Five basic geomechanical hazards are outlined. For each geomechanical hazard, two criteria are defined. There is a warning criterion, which allows for the application of remedial measures at an early stage of the “abnormal behaviour”, and an alert criterion, which defines the moment when specific measures have to be taken to avoid excavation instability. The measures outlined in the Table propose a possible method and have to be designed in detail depending on the problem and the actual geological and geomechanical conditions. Generally, reaching the alert criteria should be avoided. The measures after the alert are based on the assumption that the measures taken after the warning could not prevent the alert criterion to be reached. The proposed warning and alert system has to be updated and completed with the experience and information gained from the construction of the tunnel and, in general, is implemented in an overall risk and safety management plan.
Conclusions
This paper focuses on the methodology to define primary support measures in conventional tunnelling, based on the ground model (ground types) and the prediction of their behaviour (behaviour types). This procedure cannot bypass the geological and in situ characteristics dictating or influencing the tunnel behaviour compared with a standardised classification which could miss the specifics and particularities of and around a tunnel section.
Having defined the most critical failure mechanism, the appropriate design parameters can then be selected and a more realistic numerical analysis for the design of the temporary support system can be performed. The support measures are calculated in order to contain and control the specific failure mechanism upon excavation. Even if a tunnel engineer chooses to depend on a rock mass classification rating for the application of a support system, first he must understand the engineering geological particularities of the geomaterial and appraise the most probable mechanism of failure for the specific factors of influence (tunnel geometry, in situ stress, or groundwater conditions).
A twin tunnel in Serbia, excavated with NATM, in a challenging environment of tectonically heterogeneous rock masses of flysch formation, is used as an example. The tunnel is excavated in moderately disturbed to folded rock mass of sandstone and siltstone alternations including sheared–foliated zones of the same rock masses. The following three behaviour types are considered: discontinuity controlled overbreaks, shallow shear failure and band crown failure. For the primary tunnel support of both tunnel tubes, four support categories are designed. The primary support consists of a combination of shotcrete, wire mesh, steel arches and bolts or anchors. The excavation is divided into top heading, bench and, in one section, temporary and permanent invert. The support categories are designed for the predicted ground conditions (ground types) and the specific boundary conditions such as the slope parallel to tunnel at the western portal. A twin-tube, two-lane highway tunnel was successfully constructed without problems or divergences from the presented recommendations.
References
Austrian Society for Geomechanics (2010) Guideline for the geotechnical design of underground structures with conventional excavation. Translated from version 2.1, 29 p, 7-page Appendix
Barton N, 1976 Recent experiences with the Q-System of tunnel support design. Proc.Symposium on Exploration for Rock Engineering, pp. 107-117
Barton N, Lien R, Lunde J (1974) Engineering classification of rock masses for the design of tunnel support. Rock Mech 6(4):189–239
Bieniawski ZT (1973) Engineering classification of jointed rock-masses. Trans S Afr Inst Civ Eng 15:335–344
Bieniawski ZT (1976) Rock mass classification in rock engineering. In: Bieniawski ZT (ed) Exploration for rock engineering. Balkema, Johannesburg, pp 97–106
Deere DU (1964) Technical description of rock cores for engineering purposes. Rock Mech Eng Geol 1(1):17–22
Fortsakis P, Balasi AM, Prountzopoulos G, Marinos V, Marinos P (2011) Comparative study of the use of Hoek-Brown and equivalent Mohr-coulomb parameters in tunnel excavation. In: Cojean R, Audiguier M (eds) Géologie de l’ Ingénieur. Hommage à la mémoire de Marcel Arnould”, ISBN: 978-2-911256-58-5. Press de l’Ecole des Mines, Paris, pp 55–69
Fortsakis P, Nikas K, Marinos V, Marinos P (2012) Anisotropic behaviour of stratified rock masses in tunnelling. Eng Geol 141–142(19):74–83
Goricki W, Schubert G, Riedmueller G (2004) New developments for the design and construction of tunnels in complex rock masses. Int J Rock Mech Min Sci 41(Supplement 1):720–725
Hoek E (1994) Strength of rock and rock masses. News J Int Soc Rock Mech 2(2):4–16
Hoek E, Diederichs MS (2006) Empirical estimation of rock mass modulus. Int J Rock Mech Min Sci 43:203–215
Hoek E, Marinos P (2007) A brief history of the development of the Hoek-Brown failure criterion. Soils Rocks São Paulo 30(2):85–92
Hoek E, Marinos P, Benissi M (1998) Applicability of the geological strength index (GSI) classification for weak and sheared rock-masses – the case of the Athens schist formation. Bull Eng Geol Environ 57(2):151–160
Hoek E, Caranza-Torres CT, Corcum B (2002) Hoek-Brown failure criterion - 2002 edition. In: Bawden HRW, Curran J, Telsenicki M (eds) Proc. north American rock mechanics society (NARMS-TAC 2002). Mining innovation and technology. Canada, Toronto, pp 267–273
Marinos V (2007) Geotechnical classification and engineering geological behaviour of weak and complex rock masses in tunneling, Doctoral thesis, School of Civil Engineering, Geotechnical Engineering Department, National Technical University of Athens (NTUA), Athens. (In Greek)
Marinos V (2012) Assessing rock mass behaviour for tunnelling. Environ Eng Geosci 18(4):327–341
Marinos V (2014) Tunnel behaviour and support associated with the weak rock masses of flysch. J Rock Mech Geotech Eng 6:227–239
Marinos V (2017) A revised, geotechnical classification GSI system for tectonically disturbed heterogeneous rock masses, such as flysch. Bull Eng Geol Environ. https://doi.org/10.1007/s10064-017-1151-z
Marinos P, Hoek E (2000) GSI: A geologically friendly tool for rock mass strength estimation. In: Proc. GeoEng2000 at the Int. Conf. on Geotechnical and Geological Engineering, Melbourne, Technomic publishers, Lancaster, Pennsylvania, pp 1422-1446
Marinos V, Fortsakis P, Prountzopoulos G (2011) Estimation of geotechnical properties and classification of geotechnical behaviour in tunnelling for flysch rock masses. In: Anagnostopoulos A, Pachakis M, Tsatsanifos C (eds). Proceedings of the 15th European conference on soil mechanics and geotechnical engineering (Vol. 1). Athens, Greece, 2011. pp 435–40
Palmström A (2005) Measurements of and correlations between block size and rock quality designation. Tunn Undergr Space Tech 20(4):362–377
Palmström A, Broch E (2006) Use and misuse of rock mass classification systems with particular reference to the Q-system. Tunn Undergr Space Tech 21:575–593
Palmstrom A, Stille H (2007) Ground behaviour and rock engineering tools for underground excavations. Tunn Undergr Space Technol 27:363–376
Peck RB (1969) Advantages and limitations of the observational method in applied soil mechanics. Ninth Rankine lecture. Geotechnique 19(2):171–187
Poschl I, Kleberger J (2004) Geotechnical risks in rock mass characterization, tunnels and tunnelling international, part 1, May Issue, pp. 37-39, Part 2., October Issue, pp 36-38
Potsch M, Schubert W, Goricki A, Steidl A (2004) Determination of rock mass behaviour types, a case study. Schubert ed., VGE publisher, EUROCK 2004 and 53th Geomechanics Colloquium
Schubert W (2004) Basics and application of the austrian guideline for the geomechanical design of underground structures, Schubert ed., VGE, EUROCK 2004 and 53th Geomechanics Colloquium
Schubert W, Goricki A, Riedmuller G (2003) The guideline for the geomechanical design of underground structures with conventional excavation. Felsbau 21(4):13–18
Terzaghi K (1946) Rock defects and load on tunnel supports, Introduction to rock tunnelling with steel supports, a book by Proctor, R.V. and White, T.L. Commercial Shearing & Stamping Co., Youngtown, Ohio
Zhang W, Goh ATC (2012) Reliability assessment on ultimate and serviceability limit states and determination of critical factor of safety for underground rock caverns. Tunn Undergr Space Technol 32:221–230
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Marinos, V., Goricki, A. & Malandrakis, E. Determining the principles of tunnel support based on the engineering geological behaviour types: example of a tunnel in tectonically disturbed heterogeneous rock in Serbia. Bull Eng Geol Environ 78, 2887–2902 (2019). https://doi.org/10.1007/s10064-018-1277-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10064-018-1277-7