
Abstract
Rock joint surface roughness, which influences the shear resistance of joints, dictates the stability of rock blocks. However, there is a weakening effect on the shear behavior of a rock joint as it becomes “un-matching” caused by external factors, such as vibration due to nearby blasting, excavation or earthquake. This paper presents an experimental investigation of the shear behavior of artificial rock joints under different matching conditions by direct shear test, modeled by imposing varying magnitude of horizontal dislocation along the shear direction between the upper and lower rock blocks. The peak shear strength decreases with increasing dislocation. However, the effect of dislocation on peak shear strength becomes less pronounced as the normal stress increases. With increasing dislocation, the peak shear displacement increases; the shear stiffness decreases and gradually approaches a constant. The influence of dislocation on shear stiffness is more prominent under a higher applied normal stress. The results also show that the peak shear strength of matching joints is influenced mostly by shear velocity.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
Rock joints are encountered commonly in practical rock engineering projects, such as rock slope remedial works and rock tunnel construction. In some cases, the shear behavior of rock joints is a key issue to the stability of rock engineering structures. As such, a large number of direct shear tests have been conducted on closed joints in rock samples and in joints cut in artificial rock samples with no filling material to study their shear behavior (Ladanyi and Archambault 1969; Barton 1973; Barton and Choubey 1977; Kulatilake et al. 1995; Grasselli and Egger 2003; Xia et al. 2014). These experimental results indicated that the surface roughness primarily dictates the shear behavior of joints.
In reality, un-matching rock joints such as those resulting from a relative displacement between adjacent rock blocks, are more common in engineering project sites due to the disturbance to the original matching joints caused by external factors, such as the vibration associated with nearby blasting, excavation or earthquake, etc. Zhao (1997a, b) studied the peak shear strength of un-matching rock joints by direct shear tests and found that, in addition to roughness, joint matching coefficient (JMC) is another key factor controlling shear strength. Oh and Kim (2010) investigated the shear behavior of tooth-shaped rock joints by numerical simulations and found that shear strength was also influenced by the degree of interlocking (expressed by the term “opening”) between the upper and lower rock blocks. It should be noted that the roughness-independent parameter, JMC, introduced by Zhao (1997a) to capture the matching degree between the upper and lower rock blocks is hard to determine accurately by unaided visual assessment or even advanced computational means. The morphology of most rock surfaces in the field is irregular, and the associated geometrical parameters, such as the degree of interlocking as employed by Oh and Kim (2010), are also difficult to determine.
In the present study of the shear behavior of rock joints, direct shear tests were performed on artificial rock joints under different contact states obtained by imposing varying dislocations between the upper and lower rock blocks. As such, the morphology of one single surface of the joint under the varying contact states is identical and, hence, we can study the effect of contact state on the shear behavior of the rock joint by means of single factor analysis. Compared with determination of the JMC value, the present method allows easier control of the dislocation. Although the dislocations imposed on the matching joints in the present study may not realistically represent the un-matching rock joints in the field, the present results provide the essential fundamentals for evaluating the shear behavior of un-matching rock joints in the laboratory. We hope it will capture some, but not all, key features of un-matching rock joints in the field. Our observations can be helpful to further understand the mechanical behavior of rock joints. The influence of other factors, such as aperture, infilling, weathering and size effect on the shear behavior of rock joints is beyond the scope of the present study.
Experimental program
Sample preparation
To study the effect of contact states on the shear behavior of rock joints, it is necessary to perform direct shear tests on samples having the same geometrical features. However, it is practically impossible to find natural rock joints with the same morphology. Therefore, replicas of rock joints are used in the present study. A number of rock joints were obtained by splitting granite blocks obtained from Quanzhou (stone material supply base), Fujian province, China, using the Brazilian tensile testing method. The reasons for using granite blocks to obtain joint surfaces were as follows: (1) the material is easily accessible and inexpensive; and (2) the surfaces obtained are not easy to damage. Three representative surfaces were selected initially as parent models (more information is provided in the next section). Silicon rubber was then used to replicate the rough surface, on which replica joints were cast of cement mixed with sand and water at a ratio of 3:2:1 by weight. The upper and lower surfaces of the joint were matched well by casting. All specimens were cured at a constant temperature of 25 °C in a chamber for about 28 days at a humidity of 90 %. According to the degree of roughness, the three joints were named as Groups J-I, J-II and J-III, respectively. The joints were 300 mm long, 150 mm wide and 300 mm high.
The mechanical properties of the model material were estimated by performing uniaxial compression and Brazilian tensile disc tests on the 50-mm diameter specimens (length/diameter = 2), and the 25-mm thickness circular disk specimens (thickness/diameter = 0.5), respectively. The basic friction angle was measured by performing four direct shear tests on the flat replicas under different low normal stress levels. Each test was repeated at least four times to obtain the average value (Table 1). Refer to Tang (2013) for details of the tests.
Different contact states of the rock joints were obtained by imposing varying dislocation along the shear direction between the upper and lower rock blocks. In the present study, the horizontal dislocation was set to be 0, 5, 10, or 15 mm for each joint group, respectively. The procedures used to obtain the varying dislocation are described below (Tang et al. 2014).
-
The entire upper and lower rock blocks were placed tightly together to form one single man-made joint.
-
Under this matching condition, a set of parallel vertical scale lines were drawn at 1.0 mm intervals across the two symmetric surfaces of the joint plane.
-
The lower block was held fixed.
-
The upper block was then moved slowly to make a lateral dislocation, such as 5.0 mm, with reference to the scale lines.
Joint surface characteristics
The joint surfaces were digitized by a three-dimensional (3D) stereo-topometric measurement system (Fig. 1). The digitized lower surface of the three joints are shown in Fig. 2. As suggested by ISRM (1981), the roughness of a joint surface can be modeled by sectional profiles parallel to the shear direction. For each joint group, nine straight profiles parallel to the shear direction (along the x direction) and placed 15 mm apart along the y direction as shown in Fig. 3 (taking J-II as an example) were selected for roughness assessment.

Three-dimensional (3D) stereo-topometric measurement system. a Overall view. b Scanning lens

Joint surfaces (Tang 2013). a J–I. b J–II. c J–III

Determination of joint roughness coefficient (JRC) of the three joint groups (Xia et al. 2014). a Measurement of lines (dashed) on the joint surface along which JRC estimations were performed. b Example of roughness profiles taken on J-II
To quantify the roughness of each of these joint profiles, the JRC proposed by Barton and Choubey (1977) and suggested by ISRM (1981) was adopted in this study. The quantification method requires a visual comparison of the joint profiles against ten standard JRC profiles. To minimize subjectivity and to obtain reliable results, three experienced rock mechanics researchers were invited to estimate the JRC values of all the roughness profiles. For the jth-profile on joint surface, the values of JRC obtained from the three researchers (JRC I=1,2,3) were substituted in Eq. (1a) to obtain the mean value of the profile (JRCj=1, 2, 3,…, 9). Then, the value of JRCj for each profile was substituted in Eq. (1b) to obtain the overall average value of JRC for the joint surface (JRCAve). The results are listed in Table 2.
Testing procedure
The experimental study of contact state on the shear behavior of artificial rock joints was based on direct shear tests under constant normal load (CNL) conditions using servo-hydraulic direct shear test equipment, a CSS-342 rock mass shear machine (Fig. 4), at the Rock Mechanics and Engineering Centre of Tongji University, China. The apparatus consists of two steel shear boxes, 300 mm in length, 150 mm in width and 150 mm in height, respectively. During testing, all data (normal force, shear force, horizontal displacement and vertical displacement) were monitored and recorded by a data acquisition system connected to a computer. The shear displacement was measured by two LVDTs with an accuracy of 0.1 mm and the data recording rate is 100 data points per second.

CSS-342 rock mass shear machine
In this study, the normal loads of 0.5, 1.0, 1.5, 2.0 and 3.0 MPa were applied and the shear velocity was set to be 0.5 mm min−1. Each test was performed on a “new” joint and no specimen was used repeatedly. In order to ascertain the reproducibility of test results, each test of the matching joint was repeated three times and, for the un-matching joint, three tests were selected randomly to repeat three times for each contact state (e.g. J-I, \( \sigma_{\text{n}} = 1.0\;{\text{MPa}} \), \( d = 5\;{\text{mm}} \)). Repeatability tests showed that the maximum difference between the shear strength of each pair of the tests was 2.84 % for matching joints and 4.32 % for un-matching joints.
Usually, the upper block will rotate through a small angle and the contact between the two blocks becomes unstable after imposing a horizontal dislocation between the upper and lower blocks. To overcome the problem, a horizontal positioning device was used to fix the upper block in a horizontal level before applying the vertical normal loading. The device was removed after the normal stress was applied to the pre-selected target value.
Experimental results and analysis
Influence of contact state on shear behavior
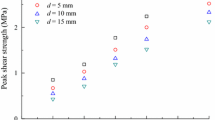
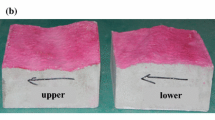
Shear stress was plotted against shear displacement for J-I, J-II and J-III under the varying dislocations in Fig. 5. Under the same test conditions, it was observed that joints with a larger dislocation had a lower peak shear strength. All the measured peak shear strength values versus the normalized dislocation (\( d/L \)) are summarized in Table 3. The relationship between the normalized dislocation and peak shear strength, which appeared to be linear, was fitted with a straight line (e.g., J-I as shown in Fig. 6). It should be noted that the upper block or the lower block surface morphology of each group is the same; however, the derived peak shear strength varied with varying dislocation. The experimental results indicated that the peak shear displacement, which is required to reach peak shear strength, increased with increasing dislocation. However, most of the existing empirical formulas, e.g., Barton (1982), did not account for this factor. The results above suggest that, apart from roughness, the contact state between the two blocks is another key factor dictating the shear behavior of the rock joint. The contact state was hereby expressed in terms of horizontal dislocation. Some post-test joint surfaces are shown in Fig. 7 and the damaged/sheared area generally decreased with increasing dislocation under the same normal stress.

Shear stress versus shear displacement for the three group joints under varying dislocations

Peak shear strength versus normalized dislocation under different normal stress for J-I

Post-test joint surfaces of Group J-I under 3.0 MPa
Influence of contact state on the shear stiffness
Shear stiffness was calculated for all tests based on the slope of the increasing segment of the derived plot of shear strength versus shear displacement. As shown in Fig. 8 (taking J-I as an example), shear stiffness decreased with increasing dislocation and gradually approached a constant value, indicating that stiffness was less affected by increasing dislocation. In addition, the influence of dislocation on shear stiffness was more obvious under the higher applied normal stress. The elasticity from the very beginning of shearing is probably related to the properties of the material used.

Shear stiffness varies with normalized dislocation under different levels of normal stresses
Influence of shear velocity on peak shear strength
In order to study the effect of shear velocity on the peak shear strength of the rock joint under different contact states, 12 direct shear tests were performed at 0.5, 1.0 and 2.0 mm min−1 shear velocity on Group J-II under the normal stress of 0.5 MPa. Figure 9 illustrates the relationship between peak shear strength and shear velocity. This figure demonstrates that, with increasing shear velocity, there is a small reduction in peak shear strength. From the different best-fit lines in Fig. 9, it can be concluded that the extent of reduction of peak shear strength as a function of shear velocity also depends on the amount of dislocation. The fitting lines for the un-matching rock joints are almost parallel to a gentler slope, but for the matching joint, the fitting line has a greater slope. We can infer conservatively that the influence of shear velocity on peak shear strength decreases with increasing dislocation.

Plot of peak shear strength versus shear velocity
Conclusions
In the present study, the shear behavior of artificial rock joints under different matching conditions was investigated by direct shear test, which was modeled by imposing varying magnitudes of horizontal dislocation along the shear direction between the upper and lower rock blocks. Experimental results show that, besides roughness, contact state is another key factor influencing the shear behavior of rock joints. The following main conclusions can be drawn from the present investigation:
-
Joints that have experienced a larger dislocation are found to have a lower peak shear strength, and the relationship between the normalized dislocation and peak shear strength presents a linear trend. Peak shear displacement increases with increasing dislocation.
-
Shear stiffness decreases rapidly when the dislocation is increased, and the influence of dislocation becomes less pronounced with increasing dislocation. Under higher applied normal stress, the influence of dislocation on shear stiffness is more obvious.
-
The extent of reduction of peak shear strength as a function of shear velocity also depends on the amount of dislocation. In addition, the influence of shear velocity on the peak shear strength decreases with increasing dislocation.
The failure mode of asperities (such as overriding, crushing and shearing off) during the course of shearing would influence the shear strength. Based on the findings reported in this paper, a focus on the failure mode of asperities is highly warranted in future experimental research.
Abbreviations
- \( {\text{Ave}} \) :
-
Average value
- \( d \) :
-
Horizontal dislocation between the upper and lower rock blocks (mm)
- \( E \) :
-
Young’s modulus (GPa)
- \( I \) :
-
Positive integer, I = 1, 2, 3
- \( {\text{JMC}} \) :
-
Joint matching coefficient
- \( {\text{JRC}} \) :
-
Joint roughness coefficient
- \( {\text{JRC}}_{\text{Ave}} \) :
-
JRC value of joint surface
- \( {\text{JRC}}_{\text{i}} \) :
-
JRC value obtained from the three researchers
- \( {\text{JRC}}_{\text{j}} \) :
-
JRC value of the j-th profile along the shear direction
- \( j \) :
-
Positive integer, j = 1, 2, 3,…, 9
- \( {\text{K}}_{\text{s}} \) :
-
Shear stiffness (MPa/mm)
- \( {\text{L}} \) :
-
Specimen length along the shear direction (mm)
- \( {\text{Max}} \) :
-
Maximum value
- \( {\text{Min}} \) :
-
Minimum value
- \( {\text{SD}} \) :
-
Standard deviation
- \( \tau_{\text{p}} \) :
-
Peak shear strength (MPa)
- \( \varphi_{\text{b}} \) :
-
Basic friction angle of rock joint (°)
- \( \sigma_{\text{c}} \) :
-
Uniaxial compressive strength of model material (MPa)
- \( \sigma_{\text{n}} \) :
-
Normal stress (MPa)
- \( \sigma_{\text{t}} \) :
-
Tensile strength of the model material (MPa)
- \( \upsilon \) :
-
Poisson’s ratio
- \( \rho \) :
-
Density (kg/m3)
References
Barton N (1973) Review of a new shear-strength criterion for rock joints. Eng Geol 7(4):287–332
Barton N (1982) Modeling rock joint behavior from in situ block tests: implications for nuclear waste repository design. Office of Nuclear Waste Isolation, Columbus, OH
Barton N, Choubey V (1977) The shear strength of rock joints in theory and practice. Rock Mech 10(1–2):1–54
Grasselli G, Egger P (2003) Constitutive law for the shear strength of rock joints based on three-dimensional surface parameters. Int J Rock Mech Min Sci 40(1):25–40
ISRM (1981) Rock characterization, testing and monitoring—ISRM suggested methods. In: Brown ET (ed) Suggested methods for the quantitative description of discontinuities in rock masses. Pergamon, Oxford, pp 3–52
Kulatilake PHSW, Shou G, Huang TH et al (1995) New peak shear strength criteria for anisotropic rock joints. Int J Rock Mech Min Sci Geomech Abstr 32(7):673–697
Ladanyi B, Archambault G (1969) Simulation of shear behavior of a jointed rock mass. In: Proceedings of the 11th US symposium on rock mechanics (USRMS), Berkeley, California, pp 105–125
Oh J, Kim GW (2010) Effect of opening on the shear behavior of a rock joint. Bull Eng Geol Environ 69(3):389–395
Tang ZC (2013) Mechanical behavior of rock joint under different contact state and columnar jointed rock mass (in Chinese with English abstract). PhD thesis, Tongji University, Shanghai
Tang ZC, Liu QS, Xia CC et al (2014) Mechanical model for predicting closure behavior of rock joints under normal stress. Rock Mech Rock Eng 47(6):2287–2298
Xia CC, Tang ZC, Xiao WM et al (2014) New peak shear strength criterion of rock joints based on quantified surface description. Rock Mech Rock Eng 47(2):387–400
Zhao J (1997a) Joint surface matching and shear strength part A: joint matching coefficient (JMC). Int J Rock Mech Min Sci 34(2):173–178
Zhao J (1997b) Joint surface matching and shear strength part B: JRC-JMC shear strength criterion. Int J Rock Mech Min Sci 34(2):179–185
Acknowledgments
The first author gratefully acknowledges the support from the Natural Science Foundation of China under project 41402247, the National Basic Research Program of China (973 Program) under project 2014CB046904, the opening fund of State Key Laboratory of Geohazard Prevention and Geoenvironment Protection under project SKLGP2014K018 and the 55th China Postdoctoral Science Foundation under project 2014M550407. The direct shear tests were performed by the first author (supported by the Natural Science Foundation of China under project 40972178) at the Tongji University during the period of studying for his PhD degree, and thanks are given to Prof. Caichu Xia. The first author wishes to thank Mr Yinglong Song for preparing the model specimens and assisting the direct shear tests. The first and fourth authors acknowledge the support by the Singapore Academic Research Fund Tier 1 Grant (RG112/14). The authors would also like to express their appreciation for the helpful comments and suggestions from an anonymous reviewer.
Author information
Authors and Affiliations
Corresponding author
Additional information
Louis Ngai Yuen Wong was formerly with School of Civil and Environmental Engineering, Nanyang Technological University.
Rights and permissions
About this article

Cite this article
Tang, Z.C., Huang, R.Q., Liu, Q.S. et al. Effect of contact state on the shear behavior of artificial rock joint. Bull Eng Geol Environ 75, 761–769 (2016). https://doi.org/10.1007/s10064-015-0776-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10064-015-0776-z