
Abstract
The paper discusses the use of kinematic stability and slope mass rating (SMR) maps in GIS based on field studies recording the relationships between the bedding/joint geometry relative to the orientation of the free face. The results indicated the potential for both planar and wedge type failures in many locations along a railway route. Whilst the results showed the procedure to be a useful first assessment of slope stability, it is recommended that the construction of the maps by kinematic slope stability and SMR analysis within the GIS medium should be used in conjunction with more sophisticated slope stability models taking into account of the material strengths, hydrostatic pressures, seepage forces, active forces, passive forces, etc.
Résumé
L’article considère l’utilisation de cartes présentant les conditions cinématiques de rupture de pente et un indice SMR de pente, dans un système d’information géographique, cartes établies à partir d’études de terrain comparant les attitudes respectives des pentes et des joints dans une masse rocheuse. Les résultats montrent que des ruptures planes et des ruptures de dièdres sont possibles en plusieurs endroits le long de la voie ferrée étudiée. La procédure est utile pour une première évaluation de la stabilité des pentes, mais il est recommandé que les cartes donnant les conditions cinématiques de rupture de pente et l’indice SMR de pente, dans un SIG, soient utilisées conjointement avec des modèles plus sophistiqués de stabilité des pentes prenant en compte les résistances des matériaux, les pressions hydrostatiques, les forces d’écoulement, les forces motrices, les forces résistantes, etc.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
Introduction
Kinematical analysis—the evaluation of potential rock slope failures using stereographic techniques—can be a significant stage in the slope stability evaluation of jointed rock masses, especially where narrowly spaced joints (ISRM 1981) make a numerical analysis difficult. The paper discusses a procedure for producing a kinematic stability and slope mass rating (SMR) map for a railway route, using GIS. In recent years, GIS technologies have been developed with the potential to address a wide range of problems in disaster management and hazard mitigation, and are increasingly playing an important role in spatial planning and sustainable development; see for example Brabb et al. 1972; DeGraff and Romesburg 1980; Jade and Sarkar 1993; Carrara et al. 1995; Chung and Fabbri 1999; Barredo et al. 2000; Van Westen et al. 2000; Fernández et al. 2003; Yilmaz and Yavuzer 2005; Gomez and Kavzoglu 2005; Yilmaz and Bagci 2006; Topal et al. 2007; Yilmaz 2008, Yilmaz 2007, Yilmaz et al. 2008, Yilmaz 2009a, b, 2010a, b etc.).
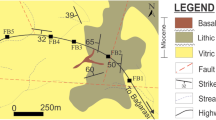
This study compares the maps obtained from slope mass rating and conventional kinematic analysis methods for rock slopes along the railway route between Çetinkaya and Divriği at the south of Sivas (Fig. 1).

Location map for the study area
Geostructural aspects and kinematic based mapping
Slope stability depends in large part upon the geological and geotechnical characteristics of the bedrock and soils that compose the slopes. For slopes composed predominantly of bedrock, however, often the most important factor is the geological structure of the rock, i.e., the location, orientation relative to the free face, and spacing of discontinuities within the bedrock including bedding, joints, faults, and shears (Mote et al. 2004).
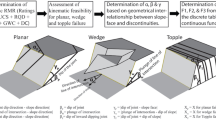
Kinematic analysis examines which modes of failure can possibly occur in the rock mass, based on a detailed evaluation of the rock mass structure and the geometry of existing discontinuities which may contribute to block instability. This technique is very useful for a preliminary assessment of possible failures in rock slopes before complex and detailed slope stability analysis. Orientations of discontinuities, dip and strike of the slope and friction angle of weakness planes are considered together in conventional kinematic analyses by using the stereo-projection technique which evaluates the two principal types of failures (planar and wedge). Planar failure is defined as sliding along a single discontinuity plane that tilts downward at an inclination flatter than that of the overlying slope face, while sliding along a line of intersection between the two planes of discontinuities causes a wedge type of failure.
If the following conditions proposed by Hoek and Bray (1981) are met, failure is kinematically possible (Kliche 1999):
-
1.
The dip of the discontinuity (or plunge of the line of the intersection of two discontinuities) must exceed the angle of friction for the rock surface.
-
2.
The discontinuity (or line of the intersection of two discontinuities) must daylight in the slope face.
-
3.
The dip of the discontinuity (or plunge of the line of the intersection of two discontinuities) must be less than the dip of the slope face.
-
4.
The strike (or dip direction) of the discontinuity must be within ±20° of the strike (or dip direction) of the slope face. Beyond this ±20° zone, the discontinuities are likely to be “locked in” and hence their significance is reduced.
In this study, both plane and wedge failure were analyzed kinematically and the following five parameters used to develop a slope instability map: slope aspect, slope dip, discontinuity strike, discontinuity dip and internal friction angle of discontinuity.
A 3-D topographic model was constructed and a digital elevation model (DEM) was obtained in GIS (Fig. 2) using ArcGIS Version (2005). The model was created with a 10 m grid cell spacing. Figure 3 shows the aspect and Fig. 4 the slope angle derived from the DEM. The strikes and dips of the discontinuities were obtained during fieldwork following ISRM (1981) and their orientations have been plotted on equatorial equal-area diagrams (Fig. 5). This indicated three significant pole concentrations (Set-1: 138/67, Set-2: 340/72, Set-3: 47/55). Friction angles were estimated as 33–36° (mean 35°) based on Barton’s (1973) criterion.

Digital elevation model (DEM) of the study area

Slope aspect map of the study area

Slope map of the study area

Generalized stereoplot of discontinuities and friction angle
Grid files of the slope and aspect maps were first converted into data files (ASCII format) and then used in the kinematic analyses together with the orientations (strike, dip) and internal friction angle of the discontinuities. When a kinematically possible failure condition in each cell (Hoek and Bray 1981) was met, “1” (or “0”) was written in output data files in ASCII format using the computer program in Q-Basic. In the last stage of the analyses, conventional kinematic slope stability maps for planar and wedge types of failures were produced and converted into grid files in ArcGIS (Fig. 6).

Conventional kinematic slope stability maps for planar (a) and wedge (b) type of failure
Slope mass rating
Bieniawski (1989) proposed the following factors should be considered in any engineering classification of a rock mass:
-
1.
the uniaxial compressive strength of the material;
-
2.
the rock quality designation (RQD);
-
3.
the spacing, orientation and condition of the discontinuities; and
-
4.
groundwater inflow.
Various modifications have been made to the initial RMR system (Bieniawski 1973, 1979, 1984, 1989); in the present study Bieniawski (1989) has been followed.
Testing procedures and mean values of results
-
1.
Strength of intact rock material: uniaxial compressive strength tests were carried out following (ISRM 1981). The mean value was 51 MPa, a rating of 7.
-
2.
RQD: this was calculated following Priest and Hudson (1976) for rock masses having a negative exponential frequency distribution of discontinuity spacing. The average value of RQD was 35%, a rating of 8.
-
3.
Spacing of discontinuities: crossed scanlines indicated discontinuity spacings of 0.065–1.95 m. The average value was 1.1 m, a rating of 8.
-
4.
Conditions of discontinuities: five parameters have been considered, following Bieniawski (1989).
-
1.
Roughness: JRC values derived from roughness profile indicated ratings from 2 to 4.
-
2.
Aperture: joints are generally moderately wide and wide, ratings from 0 to 1.
-
3.
Weathering was estimated following Barton and Choubey (1977), comparing σc and JCS (joint compression strength) measured by means of the Schmidt Hammer Test on weathered discontinuity surfaces. The σc/JCS ratio is medium; the average rating was calculated as 1.81.
-
4.
Infilling: all joints had a clay and/or silt infill and some joints were partially filled by calcite, ratings from 0 to 2.
-
5.
Persistence: the trace lengths of discontinuities indicated medium persistence (3–10 m), rating 2.
-
1.
-
5.
Groundwater conditions: The observations in the study area during the spring showed that the discontinuities were wet, rating 7.
The slope mass rating classification (SMR—Romana 1988) is a modification of the basic RMR in order to adopt it for slope stability evaluation. It is based on simple data and field observations (slope and joint orientation including dips and dip directions) from which three factors (F1, F2, F3) are evaluated. The method also takes into account a fourth factor (F4) which reflects the excavation technique used to “construct” the cut, varying from natural slope to blasted. The SMR value is computed as: SMR = RMR – (F1· F2· F3) + F4 (Calcaterra et al. 1998), where:
-
1.
F1 indicates the degree of parallelism between joints and the strike of the slope face. It ranges from 1.00 (when both are near parallel) to 0.15 (when the angle between them is more than 30° and the failure probability is very low). These values are established empirically, F1 = (1 − sinA)2, where A denotes the angle between the slope face and strike of the joints.
-
2.
F2 refers to joint dip angle in the planar mode of failure. In a sense it is a measure of the probable joint shear strength. The values varied from 1.00 (for joints dipping >45°) to 0.15 (for joints dipping <20°) and subsequently were found to approximate the relationship F2 = tg2B, where B denotes the joint dip angle.
-
3.
F3 refers to the probability that joints “daylight” in the slope face. Conditions are very fair when slope face and joints are parallel. When the slope dips 10° more than joints, very unfavorable conditions occur.
-
4.
F4 is an adjustment factor for the method of excavation and was not taken into account in the present study.
SMR values were first calculated and input into ArcGIS such that grid files of the SMR distribution could be produced by interpolation. An SMR map (Fig. 7) was then constructed by dividing the SMR values into five classes of instability, each divided into two sub-classes (Table 1) as suggested by Romana (1988). The map shows much of the slopes are classified as unstable (V, IV planar or large wedges) or partially stable (class III, some joints or many wedges) (Fig. 8).

Slope mass rating (SMR) distribution map

Relationships between SMR classes with planar a wedge b and all c types of failure possibilities
Conclusions
Kinematic analyses and GIS based maps indicated the potential for planar and/or wedge failure in many locations along the Çetinkaya and Divriği railway route, south of Sivas, Turkey.
SMR classification indicates the slopes fall into classes III, IV and V, i.e partially stable and unstable. The results agree well with the assessed kinematic and geo-structural conditions.
Although kinematic-based slope stability analysis has traditionally been performed using graphical methods or trigonometry-based equations, the results of the study suggest that the geometric relationship between hillslope and geological structures can be used in conjunction with more sophisticated slope stability models, taking into account material strength, hydrostatic pressures, seepage forces, active forces, passive forces, etc., as discussed by Mote et al. (2004).
References
ArcGIS (Version 9.1) (2005) GIS Software. ESRI, N.Y., USA
Barredo JJ, Benavides A, Hervas J, Van Westen CJ (2000) Comparing heuristic landslide hazard assessment techniques using GIS in the Trijana basin, Gran Canaria Island, Spain. JAG 2(1):9–23
Barton MR (1973) Review of a new shear strength criterion for rock joints. Eng Geol 7:287–332
Barton N, Choubey V (1977) The shear strength of rock joints in theory and practice. Rock Mech 10:1–54
Bieniawski ZT (1973) Engineering classification of jointed rock masses. Trans South Afr Inst Civ Eng 15:335–344
Bieniawski ZT (1979) The geomechanics classification in rock engineering applications. In: Proc. 4th Int. Congr. on Rock Mechanics, Balkema, Rotterdam, 2:51–58
Bieniawski ZT (1984) Rock mechanics design in mining and tunneling. Balkema, Rotterdam, p 272
Bieniawski ZT (1989) Engineering rock mass classification. Wiley, New York
Brabb EE, Pampeyan EH, Bonilla M (1972) Landslide susceptibility in the San Mateo County, California, scale 1 : 62.500, U.S. Geological Survey Miscellaneous Field Studies Map MF344
Calcaterra D, Gili JA, Iovinelli R (1998) Shallow landslides in deeply weathered slates of the Sierra de Collcerola (Catalonian Coastal Range, Spain). Eng Geol 50:283–298
Carrara A, Cardinali M, Guzzetti F, Reichenbach P (1995) GIS based techniques for mapping landslide hazard. (http://deis158.deis.unibo.it)
Chung CF, Fabbri AG (1999) Probabilistic prediction models for landslide hazard mapping. Photogramm Eng Remote Sens 65(12):1389–1399
De Graff J, Romesburg H (1980) Regional landslide-susceptibility assessment for wildland management: a matrix approach. In: Coates D, Vitek J (eds) Thresholds in geomorphology. George Allen and Unwin, London, pp 401–414
Fernández T, Irigaray C, Hamdouni RE, Chacón J (2003) Methodology for landslide susceptibility mapping by means of a GIS. Application to the Contraviesa area (Granada, Spain). Nat Hazards 30:297–308
Gomez H, Kavzoglu T (2005) Assessment of shallow landslide susceptibility using artificial neural networks in Jabonosa River Basin, Venezuela. Eng Geol 78(1–2):11–27
Hoek E, Bray J (1981) Rock slope engineering. Institution of Mining and Metalurgy, London
ISRM (2007) The complete ISRM suggested methods for rock characterization, testing and monitoring. In: Ulusay R, Hudson JA (eds), Kazan Offset Press, Ankara
Jade S, Sarkar S (1993) Statistical models for slope instability classification. Eng Geol 36:91–98
Kliche CA (1999) Rock slope stability. Society for Mining, Metallurgy, and Exploration, Inc. (SME), Littleton
Mote T, Morley D, Keuscher T, Crampton T (2004) GIS-based kinematic slope stability analysis. The ESRI user conference In: Proceedings 24th annual ESRI international user conference, August 9–13, San Diego
Priest SD, Hudson JA (1976) Discontiniuty spacing in rock. Int J Rock Mech Min Sci Geomech Abstr 13:135–148
Romana M (1988) Practice of SMR classification for slope appraisal. In: Proc. 5th Int Symp on Landslides, Balkema, Rotterdam, 2:1227–1232
Topal T, Akin M, Ozden UA (2007) Assessment of rockfall hazard around Afyon castle, Turkey. Environ Geol 53:191–200
Van Westen CJ, Soeters R, Sijmons K (2000) Digital geomorphological landslide hazard mapping of the Alpago area, Italy. Int J Appl Earth Obser Geoinform 2(1):51–59
Yilmaz I (2007) GIS based susceptibility mapping of karst depression in gypsum: a case study from Sivas basin (Turkey). Eng Geol 90:89–103
Yilmaz I (2008) A case study for mapping of spatial distribution of free surface heave in alluvial soils (Yalova, Turkey) by using GIS software. Comput Geosci 34(8):993–1004
Yilmaz I (2009a) Landslide susceptibility mapping using frequency ratio, logistic regression, artificial neural networks and their comparison: a case study from Kat landslides (Tokat-Turkey). Comput Geosci 35(6):1125–1138
Yilmaz I (2009b) A case study from Koyulhisar (Sivas-Turkey) for landslide susceptibility mapping by artificial neural networks. Bull Eng Geol Environ 68(3):297–306
Yilmaz I (2010a) The effect of the sampling strategies on the landslide susceptibility mapping by conditional probability (CP) and artificial neural networks (ANN). Environ Earth Sci 60(3):505–519
Yilmaz I (2010b) Comparison of landslide susceptibility mapping methodologies for Koyulhisar, Turkey: conditional probability, logistic regression, artificial neural networks, and support vector machine. Environ Earth Sci 61(4):821–836
Yilmaz I, Bagcı A (2006) Soil liquefaction susceptibility and hazard mapping in the residential area of Kütahya (Turkey). Environ Geol 49(5):708–719
Yilmaz I, Yavuzer D (2005) Liquefaction potentials and susceptibility mapping in the city of Yalova, Turkey. Environ Geol 47(2):175–184
Yilmaz I, Yıldırım M, Keskin I (2008) A method for mapping the spatial distribution of RockFall computer program analyses results using ArcGIS software. Bull Eng Geol Environ 67:547–554
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Yilmaz, I., Marschalko, M., Yildirim, M. et al. GIS-based kinematic slope instability and slope mass rating (SMR) maps: application to a railway route in Sivas (Turkey). Bull Eng Geol Environ 71, 351–357 (2012). https://doi.org/10.1007/s10064-011-0384-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s10064-011-0384-5