
Abstract
In this paper, the dynamical behavior of the Euler-Bernoulli beam resting on a generalized Kelvin-Voigt-type viscoelastic foundation, subjected to a moving point load, is analyzed. Generalization is done in the sense of fractional derivatives of complex-order type. Mixed initial-boundary value problem is formulated, and the solution is given in the form of Fourier series with respect to space variable, where coefficients satisfy a certain system of ordinary fractional differential equations of complex fractional order with respect to time variable. Thermodynamical restrictions on the parameters of the model are also given. It is shown that those are sufficient for the existence and the uniqueness of the solution. The solution of the problem is expressed in closed form, by using the inverse Laplace transform method. A numerical example confirming the invoked theory is presented.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The dynamic response of an elastic beam of finite length on a viscoelastic foundation subjected to moving load has begun to draw increasing attention of the researchers in recent years. It has numerous applications especially in the areas of railway track, bridge and pipeline design, where modelling of viscoelastic foundation plays a significant role in obtained accuracy of the dynamic response.
One of the pioneering, but very thorough treatments of the Winkler elastic foundation model, was introduced by Hetenyi in [1]. Moving load resting on a beam on a purely, i.e., Winkler elastic foundation was treated extensively in [2,3,4,5,6,7], but it suffers from inaccuracy in modelling of response due to the fact that damping, which is present in all real foundations, has been ignored.
In order to incorporate damping effect and thus model time-dependent behavior more accurately and features of real foundations, such as creep or stress relaxation, researchers introduced integer-order-based viscoelastic foundation. In [8,9,10,11], authors analyzed dynamical behavior of various models of a beam resting on a classical viscoelastic foundation subjected to moving load. For example, a semi-analytical solution for a uniformly moving mass on a beam resting on a two-parameter viscoelastic foundation with non-homogeneous initial conditions was given in [8], while the analytical solutions for an Euler-Bernoulli beam on viscoelastic foundation subjected to moving load are considered in [11]. The stability problem of systems incorporating multiple moving loads resting on a beam on viscoelastic foundations of various type, including determining conditions and intervals where vibration of the system becomes unstable, was analyzed in [12,13,14,15,16].
Since fractional operators do not only depend on time alone, but also on the whole previous time interval, researchers applied fractional derivatives to modelling of viscoelastic properties of materials used in structures and foundations in order to describe time memory effects in real materials more accurately. It has shown significant improvement, as it can be seen in [17] and [18]. In [19] various applications of fractional calculus in mechanics were presented, while in [20] forced vibrations of an axially compressed elastic rod resting fractionally damped were analyzed. However, application of fractional calculus in moving load problem is, to the knowledge of the authors, rare. In [21], authors analyzed dynamic behavior of an Euler-Bernoulli beam resting on the fractionally damped viscoelastic foundation subjected to a moving point load. In [22], dynamic response of fractionally damped viscoelastic plates subjected to a moving point load has been investigated. In [23], the dynamic response spectra of fractionally damped viscoelastic beams subjected to concentrated moving load have been presented, and the effect of various orders of fractional derivative damping in beams subjected to concentrated moving loads was demonstrated. Dynamic response of a simply supported viscoelastic beam of a fractional derivative type to a moving force load has been analyzed in [24]. In [25], nonlinear dynamics of beams on nonlinear fractional viscoelastic foundation subjected to moving load with variable speed has been elaborated.
In [26], the question of determining restrictions for the constitutive equation in the finite elasticity theory was first raised by C. Truesdell. In [27], by assuming the isothermal conditions in a material undergoing sinusoidal strain, a simple method for obtaining the thermodynamical restrictions on coefficients of general linear models of viscoelasticity has been presented by Bagley and Torvik and later determined in many special cases (see [28,29,30]). The conclusion was that both loss and storage modula must be positive for all frequencies. The mathematical analysis connecting approach applied in [27] with the second law of thermodynamics in the case of constitutive equations with fractional derivatives, has been presented in many papers and books (see [26, 31,32,33,34]). Nevertheless, a more general approach that delivers the restrictions on coefficients of constitutive relation that involves fractional derivatives for the weak form of thermodynamical inequality under isothermal conditions, given by
is presented in [35]. The term \( \sigma (t,x)\) is the Cauchy stress, while \( \varepsilon (t,x)\) is strain given by \( \varepsilon = \partial u/\partial x\), where u is displacement at an arbitrary point \( x\in \mathbb {R}\) of the rod and time t. We mention that inequality (1) holds for any cycle of duration \( T>0\), where cycle denotes \( \varepsilon (0,x) = \varepsilon (T,x)\) and that certain regularity of \( \varepsilon \) is imposed. We also note that the strong form of thermodynamical inequality corresponds to (1) (which implies (1)) is given by \( \sigma (t,x)\frac{\partial \varepsilon (t,x)}{\partial t} \ge 0\), \( x\in \mathbb {R}\), \( t\in [0,T]\), \( T>0\). The approach presented in [35] is then extended in [36] to the case of constitutive relations involving distributed order of fractional derivatives, generalized Kelvin-Voight model involving symmetrized fractional derivatives of complex order, as well as anti-Zener model.
In this paper we analyzed the dynamic behavior of an Euler-Bernoulli finite length beam resting on viscoelastic foundation subjected to moving load, where we assume generalized Kelvin-Voight-type foundation, in a sense that the constitutive relation describing the model contains symmetrized Riemann-Liouville fractional derivatives of complex-order type. Mixed initial value-boundary condition problem is formulated, and closed form solution is obtained by using method of separation of variables. Namely, it is obtained a form of Fourier series in respect of space variable, where coefficients satisfy certain ordinary linear fractional differential equations of complex fractional order, in respect of time variable. The solutions of the mentioned fractional differential equations are obtained analytically, using the inverse Laplace transform. Moreover we prove that the thermodynamical restrictions on parameters of generalized Kelvin–Voight-type constitutive relation are sufficient for the existence and uniqueness of the solution. We present a numerical example that confirms the applied theory.
The paper is organized as follows: in Sect. 2, the formulation of the problem is given, while in Sect. 3, we give the solution. Thermodynamical restrictions are derived in Sect. 4, where we also prove the well-posedness of the solution. Numerical results illustrating the applied theory are given in Sect. 5, and 6 is Conclusion.
2 Formulation of the problem
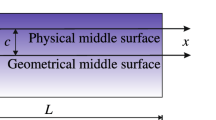
Take an elastic simply supported beam of length L positioned on the viscoelastic foundation. The foundation model is described by combination of generalized Kelvin-Voigt-type model involving symmetrized fractional derivatives of complex order and spring model in parallel combination. The beam is subjected to moving concentrated load \(F_0\) (see Figure 1) at the constant velocity \( v_0\). The beam has constant cross-sectional area; it is inextensible, uniform homogenous, and isotropic. Equilibrium equations for the beam are [37]:
where \( q_{y}\) denotes distributive force per unit length describing foundation–rod interaction. In the generalized Kelvin-Voigt-type model, the relation between \( q_{y}\) and vertical displacement y is given by the following constitutive equation:

Simply supported beam resting on the generalized Kelvin-Voigt-type viscoelastic foundation parameterized by \( \alpha \), \( \beta \) subjected to moving load with constant velocity \( v_0\)
We denote by k the Winkler stiffness coefficient, a and b are viscous damping coefficients. H and V are components of the contact force (i.e., the resultant force in an arbitrary cross section) along \(\bar{x}\) and \(\bar{y}\) axes, respectively, M is the bending moment, \(\theta \) is the angle between the tangent of the column axis and the \(\bar{x}\) axis of a rectangular Cartesian coordinate system \(\bar{x}-B-\bar{y}\), and S is the arc-length of the beam axis measured from the origin of the coordinate system B. We need the linearized geometrical equations
where we use approximate \( \cos \theta \equiv 1\), \( \sin \theta \equiv \theta \), for small \( \theta \), and the constitutive equation
The governing differential equation obtained from (2–4) is given by:
where y is dynamic deflection of the beam at the spatial coordinate x (measured along the length of the beam) and time t, EI is flexural rigidity, m is beam mass par unit length. Further, \( \delta (\cdot )\) denotes the Dirac delta distribution; operator \( _{0}D_{t}^{z}(\cdot )\) denotes the Riemann-Liouville fractional derivative of complex order \(z = \alpha +i\beta \in {\mathbb {C}}\), given by
while \( \alpha \in (0,1)\), \( \beta \in \mathbb {R}\). Constant \( \tilde{T}\) which has the physical dimension [s] has its roll in obtaining the dimensionless form of the equation.
Boundary as well as initial conditions for the beam shown in Fig. 1 are given as
where in order to simplify we treat the beam without initial imperfections, i.e., with zero initial conditions.
By introducing the following dimensionless quantities:
we set \( T = \sqrt{\frac{m L^{4}}{EI}}\), which has been obtained from the normalizing condition \( \frac{mL^4}{EIT^2} = 1\), which we impose. We also set \( \tilde{T} = T\), so that by using \( \frac{\partial ^{4} y}{\partial x^{4}} = \frac{1}{L^{3}}\frac{\partial ^{4}\bar{y}}{\partial \bar{x}^{4}}\), \( \frac{\partial ^{2}y}{\partial t^{2}} = \frac{L}{T^2}\frac{\partial ^{2}\bar{y}}{\partial \bar{t}^{2}}\) as well as \( _{0}D_{t}^{z}y = LT^{-z} _{0}D_{\bar{t}}^{z}\bar{y}\), \( z\in {\mathbb {C}}\), we further obtain the dimensionless quantities
Thus, we obtain the following dimensionless distributional form of the equation:
where \( _{0} \mathcal {D}_{t}^{\alpha ,\beta }y = \left( _{0}D_{t}^{\alpha +i\beta }y +\ _{0}D_{t}^{\alpha -i\beta }y \right) \) together with initial and boundary conditions
where for clarity we omit \( \bar{(\cdot )}\) in (9) and (10).
3 Solution of the problem
We denote the space of rapidly decreasing functions with \( \mathcal {S}(\mathbb {R})\), and its dual, i.e., the space of tempered distributions, with \( \mathcal {S}^{\prime }(\mathbb {R})\). Note that for \( \varphi \in \mathcal {S}(\mathbb {R})\), the Fourier transform is defined as \( \mathcal {F}(\varphi )(\omega ) = \int _{-\infty }^{\infty }\varphi (t)e^{-\omega t}dt\), \( \omega \in \mathbb {R}\), with \( \mathcal {F}:\mathcal {S}(\mathbb {R})\rightarrow \mathcal {S}(\mathbb {R})\), bijectively. For \( u\in \mathcal {S}^{\prime }(\mathbb {R})\), we define \( \langle \mathcal {F}(u),\varphi \rangle = \langle u, \mathcal {F}(\varphi ) \rangle \), where it holds \( \mathcal {F}:\mathcal {S}^{\prime }(\mathbb {R})\rightarrow \mathcal {S}^{\prime }(\mathbb {R})\), bijectively. Also note that \( u\in \mathcal {S}^{\prime }(\mathbb {R})\) is real valued iff \( \langle u,\varphi \rangle \in R\), for \( \varphi \in \mathcal {S}(\mathbb {R})\). Also, \( u\in \mathcal {S}^{\prime }(\mathbb {R})\) is even iff \( \check{u} = u\) and odd iff \( \check{u}=-u\), where \( \langle \check{u}, \varphi \rangle = \langle u, \check{\varphi }\rangle \) and \( \check{\varphi }(t)=-\varphi (t)\), \(t\in \mathbb {R}\), which we then write \( u(-\omega ) = u(\omega )\) and \( u(-\omega ) = -u(\omega )\), respectively.
Note, that for \( u\in L^{1}(\mathbb {R})\), with \( u(t)=0\) for \( t<0\), as well as \( |u(t)|\le A e^{at}\), \( a\in \mathbb {R}\), \( A>0\), the Laplace transform of u is defined as \( \mathcal {L}(u)(t) = \tilde{u}(s) = \int _0^{\infty }u(t)e^{-st}dt\),  . For \( u\in \mathcal {S}^{\prime }(\mathbb {R})\), the Laplace transform is defined as \( \mathcal {L}(u)(t) = \tilde{u}(s) = \mathcal {F}\left( e^{-\xi t}u(t) \right) \), \( s=\xi +i\eta \), which is holomorphic on \({\mathbb {C}}_{+}\). Also, for U(s) holomorphic on \( {\mathbb {C}}_{+}\), there exist unique \( u\in \mathcal {S}^{\prime }(\mathbb {R})\), such that \( U(s) = \mathcal {L}(u)(s)\),
. For \( u\in \mathcal {S}^{\prime }(\mathbb {R})\), the Laplace transform is defined as \( \mathcal {L}(u)(t) = \tilde{u}(s) = \mathcal {F}\left( e^{-\xi t}u(t) \right) \), \( s=\xi +i\eta \), which is holomorphic on \({\mathbb {C}}_{+}\). Also, for U(s) holomorphic on \( {\mathbb {C}}_{+}\), there exist unique \( u\in \mathcal {S}^{\prime }(\mathbb {R})\), such that \( U(s) = \mathcal {L}(u)(s)\),  . It also holds \( u(t) = \frac{1}{2\pi i}\int _{\sigma _0-i\infty }^{\sigma _0+i\infty }U(s)e^{st}ds\), \( t>0\), for any fixed \( \sigma _0>0\), if it converges, where u is continuous in that particular t.
. It also holds \( u(t) = \frac{1}{2\pi i}\int _{\sigma _0-i\infty }^{\sigma _0+i\infty }U(s)e^{st}ds\), \( t>0\), for any fixed \( \sigma _0>0\), if it converges, where u is continuous in that particular t.
We are making further progress toward solving the problem. Let us assume that using the method of separation of variables the solution of problem (9), (10), due to the boundary condition \( y(0,t)=0\), can be expressed in the following form:
implying that all other boundary conditions in (10) are met. By further calculating the required partial derivatives of the assumed solution (11) and plugging it into (9), we get the following:
where the equality in (12) holds in the distributional sense. In (12), we assume that the left-hand side is equal to zero outside [0, 1]. Thus, both left-hand side f and right-hand side g of (12) belong to the space of distributions with compact support \( \mathcal {E}^{\prime }(\mathbb {R})\) for all fixed \( t>0\), so that the dual paring \( \langle \cdot , \varphi \rangle \) is defined for all continuous \( \varphi \). Also, it then holds that \( \langle f, \varphi \rangle = \int _{0}^{1}f(x) \varphi (x)dx\). Now as \( \sin l\pi x\) is continuous on \( \mathbb {R}\), the equality \( \langle f(x), \sin l\pi x\rangle = \langle g(x), \sin l\pi x \rangle \), for \( l\in \mathbb {N}_{0}\) is equivalent to the following:
where we use \( \int _{0}^{1}\sin n\pi x \sin l\pi x dx = \left\{ \begin{array}{c} 0,\ n\ne l \\ \frac{1}{2},\ n=l \end{array} \right. ,\ n,l\in \mathbb {Z}\), as well as \( \langle \delta (x-x_0),\varphi (x)\rangle = \varphi (x_0)\), \( x_0\in \mathbb {R}\). Also, from the initial conditions \( y(x,0) = 0\) and \( \frac{\partial y}{\partial t}(x,0) = 0\), we obtain \( T_l(0)=0\) and \( \ddot{T}_l(0) = 0\), respectively, \( l\in \mathbb {N}\). Finally, from (13), we get
Further, we apply the Laplace transform on (14) and obtain
where \( K_l=(l\pi )^4 + k\), and thus, for \(l=1\),
By inverting (15) with the inverse Laplace transform and using \( \mathcal {L}^{-1}\left[ \frac{v_0\pi }{s^2 + (v_0\pi )^2} \right] = H(t)\sin v_0\pi t\) (H is for Heaviside function), we formally obtain
where
assuming that the inverse exists. Thus, for the first mode of the final solution of the problem, we obtain
with T(t) given by (17) and G(t) given by (18). We have a similar approach for other modes.
In the next Section we show that restrictions on the parameters of the model, sufficient for thermodynamical inequality (1) to hold, are also sufficient for the existence of inversion (18) and thus for the existence and the uniqueness of the solution to (9).
4 Thermodynamical restrictions and the well-posedness of the solution
In this part, we give the sufficient conditions in the form of restrictions on the parameters of constitutive equation (2), so that the thermodynamical inequality
holds, where we utilize the non-dimensional form of the constitutive equation (2), i.e.,
By formally applying the Fourier transform defined by \( \mathcal {F}(u)(\omega ) = \int _{-\infty }^{\infty }u(t)e^{-i\omega t} dt\) (for suitable u) to (21), we get the following:
where variable x is omitted for clarity, thus obtaining \(q(t) = (\Phi *_{t}y)(t)\), with
Using the theory presented in [35], Proposition 2.4, we identify
and by using the Proposition 2.4, [35], we conclude that the following conditions are sufficient for thermodynamical inequality (20) to hold:
where \(F(\omega ) = F_1(\omega )+iF_2(\omega ) = \frac{1}{i\omega }E(\omega )\) and thus \( F_1(\omega ) = \frac{E_2(\omega )}{\omega }\), \( F_2(\omega ) = -\frac{E_1(\omega )}{\omega }\). Note that \( F_1\), \( F_2\), and F are considered to be from \( \mathcal {S}(\mathbb {R})\) in general.
Next, we prove that \( \Phi \) defined by (23) is real-valued and that (25.1), (25.2) and (25.4) are satisfied for \( E(\omega )\) given by (24). By direct calculation, from (24) we get
for \( \omega \ne 0\), as well as

for \( \ \omega \ne 0\), implying that both (25.1) and (25.2) are satisfied. Also, as it holds \( |F_1(\omega )|\sim |\omega |^{1-\alpha }\), as \( \omega \rightarrow 0\), as well as \( |F_1(\omega )|\sim |\omega |^{1-\alpha }\), as \( \omega \rightarrow \infty \), we have that \( F_1\) is polynomially bounded, so that (25.4) is satisfied. Also, by applying the Proposition 1.1, [35], (25.1) and (25.2) imply that \( \Phi \) defined by (23) is real-valued. Further we give sufficient conditions for (25.4) to be satisfied. Then, we check condition (25.3). From (26), we get

for \( \ \omega \ne 0\), where we set \( x=\beta \ln |\omega |\in \mathbb {R}\). We denote . It holds
By solving , using , for \( \alpha \in (0,1)\), \( \beta > 0\) we obtain , thus getting

for \(\omega \ne 0\). Providing the right-hand side of inequality (30) larger or equal to zero so that we ensure satisfaction of (25.3), we prove the following:
Proposition 1
Let \( a,b\ge 0\), as well as \( \alpha \in (0,1)\), \( \beta >0\). Then the following are the sufficient conditions for inequality (20) to hold:

In the sequel, we find the connection between the constraints ensuring that thermodynamical inequality (20) is satisfied, and the existence and the uniqueness of the solution to problem (9), (10), i.e., the existence of inversion (18) in \( \mathcal {S}^{\prime }(\mathbb {R})\). We prove that \( F(s) = s^2 + aS^{\alpha } + \frac{b}{2}\left( s^{\alpha +i\beta } + s^{\alpha -i\beta } \right) + K\) does not have zeros in the right half-plane of complex plane, i.e., in \( {\mathbb {C}}_{+}\). We use the argument principle and prove that when \( s\in {\mathbb {C}}\) goes along the closed contour L given by (32) below, F(s) does not encircle the origin \( 0\in {\mathbb {C}}\). We define is closed contour L as following, for some small \( \varepsilon > 0\) and big \( R > 0\):
For \( L_{1}\), as \( F(s)\sim s^2 = R^2e^{i2\theta }\), \( \theta \in \left( 0,\frac{\pi }{2} \right) \), when \( s\rightarrow \infty \), we have , \( \theta \in \left( -\frac{\pi }{2},\frac{\pi }{2} \right) \), so that we have for \( s\in L_1\), when \( R\rightarrow \infty \). For \( L_2\), it holds

so that (31) implies for \( s\in L_2\). For \( L_3\), we have \( F(s)\sim K >0\), when \( s\rightarrow 0\), so that , when \( \varepsilon \rightarrow 0\), implying that on \( L_{3}\), when \( \varepsilon \rightarrow 0\). As it holds \( F(\bar{s}) = \overline{F(s)}\), we obtain for \( s\in L_4\cup L_5\), when \( R\rightarrow \infty \). Thus, we obtain that F(s) does not encircle the origin \( 0\in {\mathbb {C}}\), when \( s\in {\mathbb {C}}\) goes along the closed contour L given by (32), which proves the following:

Approximation \( y_{N}(x=0.5,t)\) of solution (11) in \( x=0.5\), for N=20, where we fix \( v_0 = 2.0, F_0 = 1, K = 10000, a=500, b=10.0, \beta = 1.0\) and vary \( \alpha =0.99\) (full line), \( \alpha =0.5\) (’– –’ line) and \(\alpha =0.3\) (‘–’ line)

Approximation \( y_{N}(x=0.5,t)\) of solution (11) in \( x=0.5\), for N=20, where we fix \( v_0 = 2.0, F_0 = 1, K = 10000, a=500, b=10.0 \alpha = 0.7\) and vary \( \beta =0.1\) (full line), \( \beta =2.0\) (’– –’ line) and \( \beta =2.8\) (’–’ line)
Proposition 2
Restrictions on coefficients of the constitutive equation (21) given by (31) are sufficient for the existence of unique inversion (18) belonging to \( \mathcal {S}^{\prime }(\mathbb {R})\).
This proves that restrictions on the coefficients of constitutive equation (21) imply that there exists the unique solution to problem (9), (10), which belongs to \( \mathcal {S}^{\prime }(\mathbb {R})\), for all \( x\in [0,1]\), as well as belonging to C([0, 1]), for all \( t>0\).
5 Numerical results
In this Section we present results of simulations of the dimensionless problem (9), (10), i.e., the wave propagation in the form of solution (11) for different set of parameters of the constitutive equation. In all experiments fixed parameters of the dimensionless model are set to the following: \( v_0 = 2.0\), \( F_0 = 1\), \( K = 10000\), \( a=500\). Also, for the calculation of inverse transform (18), as we integrate along the line \(\gamma = \{ s\in {\mathbb {C}}| s = \sigma _0+ip,\ p\in (-\infty ,\infty )\}\) (see beginning of the Section), we set \( \sigma _0 = 0.1\) and approximate the integral, by imposing \( p\in [-P,P]\), where we set \( P=100.0\). Also, we set \( N = 20\) in (11). In all experiments, we display the time diagram of the solution for fixed \( x=0.5\) on the dimensionless time in interval \( [0,t_0]\), with \( t_0 = 1/v_0 = 0.5\).

\(y_{N}(x=0.5,t)\) of solution (11) in \( x=0.5\), for N=20, where we fix \( v_0 = 2.0, F_0 = 1, K = 10,000, a=500, b=10.0, \alpha =0.7\) and vary \( \beta =0.1\) (full line), \( \beta =3.5\) (‘– –’ line) and \( \beta =4.5\) (‘–’ line)
In Fig. 2, for fixed \( b=10.0\) and \( \beta = 1.0\), the solution is displayed for different values of \( \alpha =0.99, 0.5, 0.3\). Increased damping of the peak of the solution can be seen with the increase of \( \alpha \). Thermodynamical restrictions (31) are met in all those cases. In Fig. 3, for fixed \( b=10.0\) and \( \alpha = 0.7\), the solution is displayed for different values of \( \beta =0.1, 2.0, 2.8\). It can be seen an increased oscillatory behavior of the solution, with the increase of \(\beta \). Thermodynamical restrictions (31) are also satisfied in all those cases. Figure 4 shows that with fixed \( \alpha = 0.7\) and \( b = 10.0\), we vary \( \beta = 0.1, 3.5, 4.5\) in order to analyze satisfaction of the thermodynamical restrictions (31). Based on sufficient conditions (31) those are satisfied for sure, only for \( \beta = 0.1\).
6 Conclusions
In this paper we analyzed the dynamics of an Euler-Bernoulli beam on viscoelastic foundation. Assuming that the beam is loaded by a moving point load, the main novelties of our paper may be stated as:
-
We used a novel constitutive equation for the foundation; it is Kelvin-Voigt type of constitutive equation with derivatives of complex order. We derived restrictions on the parameters of the model that guarantee that dissipativity relation is satisfied.
-
By using the separation of variables method and the Laplace transform procedure, we obtained the solution of the corresponding equation of motion. We showed that the dissipativity constraints guarantee the existence and uniqueness of the solution.
-
We presented numerical results for several values of parameters and examined the influence of parameters in the constitutive equation of the foundation.
References
Hetenyi, M.: Beams on Elastic Foundations. University of Michigan Press, Michigan (1946)
Praharaj, R.K., Datta, N., Sunny, M.R., Verma, Y.: Transverse vibration of thin ractangular orthotropic plates on translational and rotational elastic edge supports: a semi-analytical approach. Iran J. Sci. Tehnol. 45, 863–878 (2021)
Ono, K., Yamada, M.: Analysis of railway track vibration. J. Sound Vib. 130, 269–297 (1989)
Froio, D., Rizzi, E., Simoes, F.M.F., Da Costa, A.P.: Dynamics of a beam on a bilinear elastic foundation under harmonic moving load. Acta. Mech. 229, 4141–4165 (2018)
Lee, H.P.: Dynamic response of a Timoshenko beam on a Winkler foundation subjected to a moving mass. Appl. Acoust. 55, 203–215 (1998)
Sun, L.: Dynamic displacement response of beam-type structures to moving line loads. Int. J. Solids Struct. 38, 8869–8878 (2001)
Thambiratnam, D., Zhuge, Y.: Dynamic analysis of beams on an elastic foundation subjected to moving loads. J. Sound Vib. 198, 149–169 (1996)
Dimitrovova, Z.: Complete semi-analytical solution for a uniformly moving mass on a beam on a two-parameter visco-elastic foundation with non-homogeneous initial conditions. Int. J. Mech. Sci. 144, 283–311 (2018)
Di Lorenzo, S., Di Paola, M., Failla, G., Pirrotta, A.: On the moving load problem in Euler-Bernoulli uniform beams with viscoelastic supports and joints Acta. Mech. 228, 805–821 (2017)
Shakeri, R., Younesian, D.: Analytical solution for the sound radiation field of a viscoelastically supported beam traversed by a moving load. Shock Vib. (2014). https://doi.org/10.1155/2014/530131
Basu, D., Rao, N.S.V.K.: Analytical solutions for Euler-Bernoulli beam on visco-elastic foundation subjected to moving load. Int. J. Numer. Anal. Meth. Geomech. 37, 945–960 (2013)
Stojanovic, V., Kozic, P., Petkovic, M.D.: Dynamic instabilite and critical velocity of a mass moving uniformly along a stabilized infinite beam. Int. J. Solids Struct. 108, 164–174 (2017)
Stojanovic, V., Petkovic, M.D.: Dynamic stability of vibrations and critical velocity of a complex bogie system moving on a flexibly supported infinity track. J. Sound Vib. 434, 475–501 (2018)
Stojanovic, V., Petkovic, M.D., Deng, J.: Instability of vehicle systems moving along an infinite beam on a viscoelastic foundation. Eur. J. Mech. A Solids. 69, 238–254 (2018)
Stojanovic, V., Petkovic, M.D., Deng, J.: Stability and vibrations of an overcritical speed moving multiple discrete oscillators along an infinite continuous structure. Eur. J. Mech. A Solids. 75, 267–280 (2019)
Stojanovic, V., Petkovic, M.D., Deng, J.: Stability of vibrations of a moving railway vehicle along an infinite complex three-part viscoelastic beam/foundation system. Int. J. Mech. Sci. 136, 155–168 (2018)
Eldred, L.B., Baker, V.P., Palazotto, A.N.: Kelvin-Voigt versus fractional derivative model as constitutive relations for viscoelastic materials. AIAA J. 33, 547–550 (1995)
Meral, F.C., Royston, T.J., Magin, R.: Fractional calculus in viscoelasticity: An experimental study. Commun. Nonlin. Sci. Numer. Simulat. 15, 939–945 (2010)
Atanackovic, T.M., Pilipovic, S., Stankovic, B., Zorica, D.: Fractional Calculus with Applications in Mechanics, Hoboken. Wiley Online Library, NJ (2014)
Atanackovic, T.M., Janev, M., Konjik, S., Pilipovic, S., Zorica, D.: Vibrations on an elastic rod on a viscoelastic foundation of complex fractional Kelvin-Voigt type. Meccanica. 50, 1679–1692 (2015)
Praharaj, R.K., Datta, N.: Dynamic response of Euler-Bernoulli beam resting on fractionally damped viscoelastic foundation subjected to a moving point load. J. Mech. Eng. Sci. (2020). https://doi.org/10.1177/0954406220932597
Praharaj, R.K., Datta, N., Sunny, M.R.: Dynamic response of fractionally damped viscoelastic plates subjected to a moving point load. J. Vib. Acoust. 142, 041002–1 (2020)
Praharaj, R.K., Datta, N.: Dynamic response spectra of fractionally damped viscoelastic beams subjected to moving load. Mech. Based Des. Struct. Mach. (2020). https://doi.org/10.1080/15397734.2020.1725563
Freundlich, J.: Dynamic response of a simply supported viscoelastic beam of a fractional derivative type to a moving force load. J. Theor. Appl. Mech. 54, 1433–1445 (2016)
Ouzizi, A., Abdoun, F., Azrar, L.: Nonlinear dynamics of beams on nonlinear fractional viscoelastic foundation subjected to moving load with variable speed. J. Sound Vib. 523, 116730 (2022)
Truesdell, C.: Das ungelöste Hauptproblem der endlichen Elastizitäts theorie. Z. Angew. Math. Mech. 36, 97–103 (1956)
Bagley, R.L., Torvik, P.J.: On the fractional calculus model of viscoelastic behavior. J. Rheol. 30, 133–155 (1986)
Atanackovic, T.M.: On a distributed derivative model of a viscoelastic body. C.R. Mecanique. 331(10), 687–692 (2003)
Atanackovic, T.M., Konjik, S., Oparnica, L.J., Zorica, D.: Thermodynamical restrictions and wave propagation for a class of fractional order viscoelastic rods. Abstr. Appl. Anal. (2011). https://doi.org/10.1155/2011/975694
Atanackovic, T.M., Pilipovic, S., Stankovic, B., Zorica, D.: Fractional Calculus with Applications in Mechanics: Vibration and Diffusion Processes, London. Wiley-ISTE, UK (2014)
Fabrizio, M.: Fractional rheological models for thermomechanical systems. Dissipation and free energies. Fract. Calc. Appl. Anal. 17, 206–223 (2014)
Hanyga, A.: Physically acceptable viscoelastic models. In: Hutter, K., Wang, Y. (eds.) Trends in Applications of Mathematics to Mechanics, pp. 125–136. Shaker Verlag GmbH, Aachen (2005)
Fabrizio, M., Morro, A.: Mathematical Problems in Linear Viscoelasticity. SIAM, Philadelphia (1992)
Amendola, G., Fabrizio, M., Golden, J.M.: Thermodynamics of Materials with Memory, New York, Dordrecht, Heidelberg. Springer, London (2010)
Atanackovic, T.M., Janev, M., Pilipovic, S.: On the thermodynamical restrictions in isothermal deformations of fractional Burgers model. Philos. T. R. Soc. A. (2020). https://doi.org/10.1098/rsta.2019.0278
Atanackovic, T.M., Janev, M., Pilipovic, S., Selesi, D.: Viscoelasticity of fractional order: New restrictions on constitutive equations with applications. Int. J. Struct. Stab. Dy. 20(13), 2041011 (2020)
Atanackovic, T.M.: Stability Theory of Elastic Rods. World Scientific, River Edge N.J (1997)
Acknowledgements
This work is supported by the Project F-64 of Serbian Academy of Sciences and Arts (TMA).
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor (e.g. a society or other partner) holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Lukešević, L.R., Janev, M., Novaković, B.N. et al. Moving point load on a beam with viscoelastic foundation containing fractional derivatives of complex order. Acta Mech 234, 1211–1220 (2023). https://doi.org/10.1007/s00707-022-03429-7
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00707-022-03429-7