
Abstract
This paper is validated the multi inputs (two inputs) fuzzy PID (MIFPID) controller as automatic generation control (AGC) over two disparate consolidation of single input FPID (SIFPID-1 and SIFPID-2) controller for a two area interconnected power system. The objective function is formulated by concerning undershoot, overshoot, and settling time of frequency and tie-line power deviation of the power system by implementing two different SIFPID and MIFPID controllers individually as AGC in each area. Modification of Group Hunting Search optimization (MGHS) is proposed to optimize the gain parameters of controllers to minimize the multi-objective problem with constraint. All the performances of these controllers as AGC are examined by implementing a load disturbance of 1% (0.01 p.u.) in area-1. Finally, MIFPID controller optimized by MGHS algorithm contributes better performance in the proposed system.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
In complex power system, interconnection between two areas enhances the quality of the supply power, stability of the system and capability to utilize the generating plant. Load deviation arises numerously which affects the power and system frequency deviation all over the power system. Primary controllers (rotating mass of such as governor and turbine of the system) may not overcome the large deviations (Kundur 1994). These enormous load deviations may be taken care by secondary controller like proportional (P), integral (I), derivative (D), PID, fuzzy, and etc. proportional (P), integral (I), derivative (D), PID, fuzzy, and etc. are used as secondary controller to enhance the capability to handle the load fluctuations in the power system. The primary purposes of the AGC are to:
-
1.
Achieve the system frequency equal to its scheduled frequency (i.e. ∆f = 0).
-
2.
Achieve the power through tie-line equal to its scheduled value (i.e. ∆Ptie = 0).
-
3.
Achieve a superior control to minimize the objectives (settling time, undershoot, and overshoot) of the system after any load fluctuation.
To enhance the ability of the AGC to achieve better regulation over these specifications, fuzzy PID is one of the superior controller. In this work two different consolidations of FLC and PID are implemented in each area of the power system. Transfer function model of thermal with GRC and hydro power plant are used as generation units in area-1 and area-2 respectively. Controller’s gain parameters are another decisive aspect also to enhance the transient performance of the system. So selection of optimization technique is a significant aspect to grab the optimal solution of the gain parameters to lessen objective function (ITAE).
AGC is the most indispensable strategy in the power system which concerns the economic and stable power generation. To enhance the power quality many ideas have implemented to enhance the secondary controller as AGC. Some researchers (Ibrahim and Kothari 2005) have portrayed a relative analysis of various schemes implemented as AGC. The adequacy of superconducting magnetic energy storage (SMES) over integral controller used as AGC in a two area interconnected hydro-thermal system is distinguished by (Abraham et al. 2007). GA optimized PID controller has successfully implemented in an interconnected power system with thermal units (Singh and Sen 2004). Cascade controller titled as PI-PD controller optimized by FPA is introduced in four area interconnected reheat thermal power plants (Dash et al. 2016). Fuzzy logic controller (FLC) has convinced as a very robust and intelligent controller used as AGC (Indulkar and Raj 1995; Cam and Kocaarslan 2005; Oftadeh et al. 2010). The robustness of FPID controller is enhanced with the assemblage of advantages from both PID and FLC controller. FPID controller (Pande and Kansal 2015) optimized by different powerful algorithms have depicted (Sahu et al. 2016; Nayak et al. 2015; Pati et al. 2014, 2015). PSO (Kennedy and Eberhart 1995) is applied to optimize PID controller as AGC (Ghoshal 2004). Application of various novel metaheuristic techniques and hybridization among them like BF (Nanda et al. 2009), BFOA-PSO (Panda et al. 2013), DE (Rout et al. 2013), FA-PS (Sahu et al. 2015a, b), FPA (Madasu et al. 2016), TLBO (Sahu et al. 2015a, b), ALO (Satheeshkumar and Shivakumar 2016) and CS (Sikander et al. 2017) to optimize the parameters of different controllers adequately.
In this paper, the GHS algorithm is modified by replacing the worst candidates by randomly generated candidate. The probability to hunt optimum solution is enhanced by this process. The multi inputs fuzzy PID controller is validated over two distinct combinations of single input fuzzy PID controllers. The two different combinations of SIFPID controllers are SIFPID-1 and SIFPID-2. In SIFPID-1, ACE is the only input of the controller and in SIFPID-2, ACE and ΔACE are the inputs to two FLCs. The novelties of this paper are:
-
1.
The MIFPID controller is validated over two distinct combinations of SIFPID controller in AGC.
-
2.
The GHS algorithm is modified to enhance the capability to hunt optimum pair of controller gains.
-
3.
The effect of non-linearity in power system.
Finally, MGHS technique optimized MIFPID controller is validated over other combinations of SIFPID controllers.
2 Power system modelling
The proposed system is a two area interconnected hydro-thermal power system. Area-1 consists of thermal power plant with generation rate constraints (GRC) and area-2 consists of a hydro power plant as delineated in Fig. 1. The transfer function parameters are mentioned in Appendix 1. Implementation of a load disturbance of 1% (0.01) in thermal area propagates error in each area titled as area control errors (ACE1 and ACE2). ACEs concerning deviations of frequency and tie-line power has to be minimized and may be defined as:
where B1 and B2 are the bias factors of frequency. The deviations of frequency with respect to nominal value in area-1 and area-2 are ∆f1 and ∆f2 respectively. The deviation of power in tie-line is ∆Ptie and is characterized as:

Power system model (Nayak et al. 2017)
SIFPID-1, SIFPID-2 and MIFPID controllers are executed in both the areas individually to examine the controller effectiveness to enhance the system performance. Intelligent MIFPID controller is observed as superior controller over SIFPID-1 and SIFPID-2 controllers. Compilation of advantages of both PID and FLC causes the FPID controller more precious and novel. The objective function for this system by concerning tie-line power deviation and frequency deviation is characterized in Eq. (4):
where i = 1, 2, 3, …, n. ‘n’ is the numbers of design parameters.
3 Controller structure
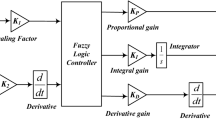
The performance of the power system is primarily rely upon the controller design. Fuzzy logic controller (FLC) is adopted by many researchers as controllers from last few decades. In this purposed system, three distinct combinations of PID and FLC (SIFPID-1, SIFPID-2 and MIFPID) are adopted as controllers as portrayed in Fig. 2. The membership functions of all FLCs portrayed in Fig. 3 are adopted for all the controllers. Five MFs titled as negative high (NH), negative low (NL), zero (Z), positive low (PL), and positive high (PH) as delineated in Fig. 3 are adopted for all the controllers.

a SIFPID-1 controller structure, b SIFPID-2 controller structure, c MIFPID controller structure

Membership function structure of FLC
In SIFPID-1 controller, ACE is adopted as the only input of the controller as portrayed in Fig. 2a. In SIFPID-2 controller, two FLC are adopted in which ACE and ΔACE are the corresponding inputs of the two FLCs as shown in Fig. 2b. The rules for both SIFPID-1 and SIFPID-2 are as follows.
If input is NH then output is NH.
If input is NL then output is NL.
If input is Z then output is Z.
If input is PL then output is PL.
If input is PH then output is PH.
In MIFPID controller, ACE and ΔACE are adopted as two inputs to the FLC as illustrated in Fig. 2c. Table 1 encloses the rules of MIFPID controller.
4 Modified Group Hunting Search (MGHS) algorithm
The relation between predator (group hunters i.e. lions, wolves etc.) and prey is beautifully expressed as optimization technique (Oftadeh et al. 2010). GHS algorithm is derived from the strategy of hunting a prey by concerning the group hunting technique. Unity of group members adopt an approach to trap the prey by circumscribing it. The member of the group near to the prey is adopted as leader and all other member follows leader to move towards the prey (optimum solution). If any of the group member amends by a better position compared to the recent leader then it becomes leader in the next generation. The hunters in each generation follows the leader by concerning maximum moments towards the leader (MML). MML affects the algorithm to maintain the balance between exploration and exploitation. If the MML value is large then the algorithm may skip over the optimum point and small value of MML may reduce the diversity factor of algorithm. In MGHS, the MML value is decaying constantly with iteration. The worst hunters in the group are replaced by other random numbers to enhance the probability to get optimum point. The stride of the MGHS are as:
-
1.
Initialize the population randomly of size X[NP×D] within the limit 0.01–2.
-
2.
The best fitted hunters among the group is adopted as leader.
-
3.
The hunter’s positions are refurbished towards the leader. The mathematical expression is defined in Eq. (5):
$$ X_{i}^{k + 1} = X_{i}^{k} + rand \times MML \times (X_{i}^{L} - X_{i}^{k} ). $$(5)$$ MML = 0.6 - \left( {it \times \left( {\frac{0.6}{iter\,\hbox{max} }} \right)} \right), $$where ‘it’ is the current iteration, itermax is the maximum iterations and \( X_{i}^{L} \) is the position of leader.
-
4.
The position of hunters are corrected as in Eq. (6) by concerning hunter’s group consideration rate (HGCR) and distance radius (Ra):
$$ X_{i}^{k + 1} = \left\{ \begin{aligned} & X_{i}^{k + 1} \in \{ X_{i}^{1} ,X_{i}^{2} , \ldots ,X_{i}^{HGS} \} \,with\,probability\,HGCR \\ & X_{i}^{k + 1} \pm R_{a} \,with\,probability\,(1 - HGCR) \\ \end{aligned} \right., $$(6)$$ Ra(it) = Ra_{\hbox{min} } (\hbox{max} (X_{i} ) - \hbox{min} (X_{i} ))\exp \left( {\frac{{\ln \left( {\frac{{Ra_{\hbox{min} } }}{{Ra_{\hbox{max} } }}} \right) \times it}}{iter\,\hbox{max} }} \right), $$(7)Ra is an exponential decay function expressed in Eq. (7).
-
5.
Identify the group to avoid the algorithm to be trapped into local optima. It may be defined as in Eq. (8):
$$ X_{i}^{k + 1} = X_{i}^{L} \pm rand(\hbox{max} (X_{i} ) - \hbox{min} (X_{i} )) \times \alpha \exp ( - \beta \times EN), $$(8)where EN is the numbers of epochs. EN is estimated by matching the difference of leader and worst hunter with a small value.
-
6.
The worst hunters are replaced by the random numbers to enhance the probability to extract optimum point as expressed in Eq. (9):
$$ \begin{aligned} count = find((f(X_{i}^{L} ) + M) < f(X_{i} )) \hfill \\ X_{i} (count) = \hbox{min} (X_{i} ) + rand \times (\hbox{max} (X_{i} ) - \hbox{min} (X_{i} )). \hfill \\ \end{aligned} $$(9) -
7.
Repeat steps 3–6.
In Appendix 2 all the specifications of MGHS are portrayed.
5 Results and discussion
GHS and MGHS algorithms are executed for 100 iterations to resolve the steps to discover the optimal gain parameters of SIFPID-1, SIFPID-2 and MIFPID controllers. Variables K1, K2, K3, and K4 are adopted as the design variables for SIFPID-1 and MIFPID as portrayed in Fig. 2a, c. K1, K2, K3, K4 and K5 are the design variables of SIFPID-2 controller. The values of the above mentioned parameters are characterized within the perimeter 0.01–2. Table 2 represents the gain parameters of the different controllers optimized by GHS and MGHS algorithm. The GHS and MGHS algorithm is validated by comparing with PSO and CRPSO described in Nayak et al. (2017).
The deviation of frequency in area-2 of interconnected hydro-thermal power system without GRC is illustrated in Fig. 4 to contrast the proposed algorithm over PSO, CRPSO and DECRPSO algorithm to optimize FPID controller. The controller gain parameters of the system without GRC is tabulated in Table 3.

Frequency deviation in area-2 of hydro-thermal power system without GRC
The convergence plot to validate the GHS and MGHS algorithms optimized different controllers is illustrated in Fig. 5. The power deviation in tie-line and frequency deviations of both areas by implementing different controllers optimized by different algorithms are portrayed in Figs. 6, 7 and 8.

Convergence plot

Frequency deviation in area-1

Frequency deviation in area-2

Tie-line power deviation
The settling time (Ts), peak overshoot (Osh), and peak undershoot (Ush) are the objectives which are used to discriminate the performances of the controllers. Settling time is evaluated by considering a dimension of ± 0.002% (2 × 10−5) of final value. Ts, Ush, and Osh of the system are minimum with MIFPID controller optimized by MGHS algorithm as reported in Table 4.
MIFPID controller optimized by MGHS algorithm is validated as the better controller over SIFPID controller.
6 Conclusion
The purpose of this paper is to validate the MIFPID controller optimized by hybrid DECRPSO algorithm as an improved secondary controller of the interconnected hydro-thermal power system. For this purpose MIFPID, and SIFPID controllers are applied separately in each area as AGC optimized by GHS, and MGHS algorithm. With 1% load disturbance in area-1, MIFPID controller is validated better than SIFPID controller to enhance the ability to get better control over tie-line power deviation and frequency deviation by considering their settling time, undershoot, and overshoot. The supremacy of MGHS algorithm over GHS is validated by optimizing both MIFPID and SIFPID controllers.
References
Abraham RJ, Das D, Patra A (2007) Automatic generation control of an interconnected hydrothermal power system considering superconducting magnetic energy storage. Int J Electr Power Energy Syst 29(8):571–579
Cam E, Kocaarslan I (2005) Load frequency control in two area power system using fuzzy logic controller. Energy Convers Manag 46(2):233–243
Dash P, Saikia LC, Sinha N (2016) Flower pollination algorithm optimized PI-PD cascade controller in automatic generation control of a multi-area power system. Int J Electr Power Energy Syst 82:19–28
Ghoshal SP (2004) Optimizations of PID gains by particle swarm optimizations in fuzzy based automatic generation control. Electr Power Syst Res 72(3):203–212
Ibrahim KP, Kothari DP (2005) Recent philosophies of AGC strategies in power system. IEEE Trans Power Syst 20(1):346–357
Indulkar CS, Raj B (1995) Application of fuzzy controller to AGC. Electr Mach Power Syst 23:209–220
Kennedy J, Eberhart R (1995) Particle swarm optimization. Neural networks. In: Proceedings, IEEE international conference on, 4, 1995, vol 4, pp 1942–1948
Kundur P (1994) Power system stability and control. McGraw-Hill, New York
Madasu SD, Kumar MLSS, Singh AK (2016) A flower pollination algorithm based automatic generation control of interconnected power system. Ain Shams Eng J. https://doi.org/10.1016/j.asej.2016.06.003
Nanda J, Mishra S, Saikia LC (2009) Maiden application of bacterial foraging-based optimization technique in multi area automatic generation control. IEEE Trans Power Syst 24(2):602–609
Nayak JR, Pati TK, Sahu BK, Kar SK (2015) Fuzzy-PID controller optimized TLBO algorithm on automatic generation control of a two-area interconnected power system. In: IEEE international conference on circuit, power and computing technologies, ICCPCT, pp 4–7
Nayak JR, Shaw B, Sahu BK (2017) Load frequency control of hydro-thermal power system using fuzzy PID controller optimized by hybrid DECPSO algorithm. IJPAM 114(9):147–155
Oftadeh R, Mahjoob MJ, Shariatpanahi M (2010) A novel meta-heuristic optimization algorithm inspired by group hunting of animals: Hunting search. Comput Math Appl 60(7):2087–2098
Panda S, Mohanty B, Hota PK (2013) Hybrid BFOA–PSO algorithm for automatic generation control of linear and nonlinear interconnected power systems. Appl Soft Comput 13(12):4718–4730
Pande S, Kansal R (2015) Load frequency control of multi area system using integral fuzzy controller. Int J Eng Res Appl 5(6):59–64
Pati S, Sahu BK, Panda S (2014) Hybrid differential evolution particle swarm optimisation optimised fuzzy proportional–integral derivative controller for automatic generation control of interconnected power system. IET Gener Transm Distrib 8(11):1789–1800
Pati TK, Nayak JR, Sahu BK (2015) Application of TLBO algorithm to study the performance of automatic generation control of a two-area multi-units interconnected power system. In: IEEE international conference on signal processing, informatics, communication and energy systems (SPICES)
Rout UK, Sahu RK, Panda S (2013) Design and analysis of differential evolution algorithm based automatic generation control for interconnected power system. Ain Shams Eng J 4(3):409–421
Sahu RK, Panda S, Padhan S (2015a) A hybrid firefly algorithm and pattern search technique for automatic generation control of multi area power systems. Int J Electr Power Energy Syst 64:9–23
Sahu BK, Pati S, Mohanty PK, Panda S (2015b) Teaching-learning based optimization algorithm based fuzzy-PID controller for automatic generation control of multi-area power system. Appl Soft Comput J 27:240–249
Sahu BK, Pati TK, Nayak JR, Panda S, Kar SK (2016) A novel hybrid LUS-TLBO optimized fuzzy-PID controller for load frequency control of multi-source power system. Int J Electr Power Energy Syst 74:58–69
Satheeshkumar R, Shivakumar R (2016) Ant lion optimization approach for load frequency control of multi-area interconnected power systems. Sci Res Publ Inc Circuits Syst 7:2357–2383
Sikander A, Thakur P, Bansal RC, Rajasekar S (2017) A novel technique to design cuckoo search based FOPID controller for AVR in power systems. Comput Electr Eng 0:1–14. https://doi.org/10.1016/j.compeleceng.2017.07.005
Singh R, Sen I (2004) Tuning of PID controller based AGC system using genetic algorithms. TENCON 3:531–534
Author information
Authors and Affiliations
Corresponding author
Additional information
Proceedings of the 1st International Conference on Recent Innovations in Electrical, Electronics and Communication Systems (RIEECS 2017).
Appendices
Appendix 1 (power system parameters)
Kp1 = Kp2 = 120 HZ/p.u. MW,
TP1 = TP2 = 20 s, B1 = B2 = 0.4249;
R1 = R2 = 2.4 HZ/p.u. MW; Tg = 0.08 s;
Tt = 0.3 s; T1 = 41.6 s; T2 = 0.513 s;
TR = 5 s; TW = 1 s; T12 = 0.0866;
D1 = D2 = 8.333 × 10−3 p.u. MW/Hz.
Appendix 2 (assumptions of algorithms)
HGCR = 0.3; Ramax = 0.0001; Ramin = 1×10−6.
Rights and permissions
About this article

Cite this article
Nayak, J.R., Shaw, B., Das, S. et al. Design of MI fuzzy PID controller optimized by Modified Group Hunting Search algorithm for interconnected power system. Microsyst Technol 24, 3615–3621 (2018). https://doi.org/10.1007/s00542-018-3788-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00542-018-3788-3