
Abstract
This paper proposes an analysis and optimization of new micro-displacement sensor for a compliant microgripper. This gripper is embedded with strain gauges at the flexure hinges to become a displacement sensor in the range of micrometer. In addition, this paper also presents an effective approach to enhance the first natural frequency of the microgripper. Specifically, the silicone rubber is used to fill the open cavities of the gripper in order to increase the stiffness, and as a result the frequency shows a relative improvement. It reveals that the gripper can realize the necessary displacement with the embedded sensor element. The stiffness of gripper can be reinforced by the rubber. As a result the frequency of the gripper is improved. The displacement and frequency are then optimized via using the differential evolution algorithm. The optimal result indicates that the gripper possesses an infinite fatigue life of 5.92 × 107 cycles for producing a large range of motion of 660 µm and a frequency of 326 Hz. The prototype is fabricated via wire electrical discharged machining. The experimental results are in a good an agreement with the predicted and analyzed ones.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Micropositioning technologies have been recently adopted to recognize a precise position for accurate microgrippers of several to a few hundreds of microns. Compared with traditional platforms, flexure-based platforms can fulfill the requirements of microgripper systems because of such advantages as monolithic manufacturing, friction free, zero wear and zero lubrication. Recently, flexure-based positioning platforms have been developed (Polit and Dong 2009; Choi et al. 2014; Guo et al. 2015; Dao and Huang 2015a, b; Huang and Dao 2016; Dao 2016) with some applied in the fields of aerospace (Tsai et al. 2009), compliant microgrippers (Chen et al. 2016; Dao and Huang 2013a), flexible joint (Dao and Huang 2013b; Li and Xu 2011) and micropositioning systems (Huang and Li 2010). In this study, a flexure-based platform is developed for a compliant microgripper. The gripper is tended to grasp a micropin with a micro size in industrial applications. For example, a micropin is assembled into a hole of rotor of a micro motor. How to locate accurately the position of micropin, this is a relatively difficult for a microgripper. To reach a precise position, the microgripper needs a displacement sensor to realize the motion range of micrometer. For these reasons, a micro-displacement sensor is developed via integrating strain gauges at flexure hinges of the flexure-based platform in this study. The micro-displacement sensor is also a subcomponent of the structure of compliant microgripper.
Recently, sensory systems are interesting issue in the field of robotic gripper. Many sensing types are being investigated to increase the robot awareness. For instance, to recognize the displacement of the compliant microgripper, displacement sensors (Lin et al. 2015; Teo et al. 2014) or capacitive displacement sensors (Xi et al. 2016) were utilized. However, such commercial sensors are very expensive. Therefore, a microgripper must have a self-measurement of the displacement. Generally, along with a large displacement, a high first natural frequency is also an important response of the gripper. To enhance the frequency, the geometric dimensions of gripper must become larger. This leads a bulk structure that maybe not suitable for real grippers in robotics. Hence, a silicone rubber (SR) is inserted into the cavity of the structure to increase the frequency of microgripper.
The aim of this study is to propose a new analysis and optimization for a micro-displacement sensor of compliant gripper. Moreover, the structure of the proposed platform has an open cavity that is filled with silicone rubber in order to reinforce the stiffness of the platform and thereby improve the frequency. The response of the platform is then faster as a result of the enhanced frequency. Finite element method is used to analyze the mechanical behaviors of the platform. The prototype of the platform is manufactured. The differential evolution algorithm is employed to optimize both the displacement and frequency. At last, the experimentations are conducted to compare with the FEM results and validate the predicted optimal results.
The main contributions of this paper are as follows: (1) design of a new flexure-based structure that serves as a micro-displacement sensor with a large displacement measurement range; (2) a large motion range and a high stiffness; (3) a high frequency; and (4) the design variables of the structure are optimized to achieve the best displacement and frequency by using a differential evolution algorithm.
2 Mechanical design and working principle
2.1 Description of mechanical design
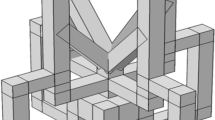
To achieve a large displacement range and a high stiffness, a new flexure-based micropositioning platform (FMPP) was designed for a compliant microgripper, as shown in Fig. 1a. The strain gauges are embedded in the platform in order to directly measure the displacement. For a real application, the platform would be applied for a microgripper, as depicted in Fig. 1b. The microgripper consisted of a micropin as a grasped object, a fixed jaw, a movable jaw, and a piezoelectric actuator. Behavior characteristics of the platform were actually just like those of the microgripper. Hence, instead of analyzing the gripper, the quality characteristics of the platform were analyzed in this study. The proposed platform mainly consists of four groups of flexure hinges, a mobile platform, rigid bodies and twelve integrated strain gauges. The platform was embedded with the strain gauges so as become a micro-displacement sensor.

Models: a flexure-based micropositioning platform and b microgripper
The platform contains a symmetric structure to allow a large displacement range along the y-axis. The flexure hinges are divided into four types: A, B, E and F. Each flexure hinge is considered as an elastic body. Each elastic body is considered as a substrate, where each sensor gauge is integrated on the surface of the substrate. The A group of flexure hinges is combined with the F group of flexure hinges through the C rigid link. The F y is a force from a force gage or a piezoelectric actuator that exerts on the D mobile platform. The material Al 7075 was selected for the platform due to its high yield strength of 435 MPa, Young’s modulus of E = 72,000 MPa, light density of 2770 kg/m3 and Poisson’s ratio of 0.33.
The A group of flexure hinges, organized in the horizontal direction, includes eight elastic bodies with the same length of l A , width of w and thickness of t A . The function of the A group is to generate the translational motion of the D mobile platform along the y-axis. The B group of flexure hinges, which is organized in the vertical direction, consists of two elastic bodies having the same length of l B , width of w B and thickness of t B . The function of the B group is to provide a larger displacement for the D mobile platform along the y-axis. If the B group is the rigid bodies, the displacement of the D mobile platform is decreased, and so the B group is designed via the use of flexure hinges. In the FMPP structure, the A, B, E and F groups are all associated with the displacement along the y-direction.
The twelve strain gauges from S1 to S12 are glued using an appropriate adhesive to the surfaces of the A group of flexure hinges at suitable positions. Four strain gauges from S1B to S4B are glued using an appropriate adhesive to the surfaces of the B group of flexure hinges. Two strain gauges, such as S1E and S2E, are glued using an appropriate adhesive to the surfaces of the E group of flexure hinges. Two strain gauges, such as S1F and S2F, are glued using an appropriate adhesive to the surfaces of the F group of flexure hinges. In this study, the sensor gauges are the KFG 5-120-C1-11L1M2R, KYOWA type with a gauge factor of 2.07 and resistance of 120.4 O; the adhesive is the Cyanoacrylate CC-33A KOWA type.
The displacement of the flexure hinges is detected by the strain gauges. The S1 to S6, S1B, S2B, S1E and S1F are organized on the surfaces on the left side of the FMPP, while S7 to S12, S3B, S4B, S2E and S2F are located on the surfaces at the right side of the FMPP. The platform is located at the fixed holes using screws. The platform’s open cavities are filled with viscoelastic material. Silicon rubber material, serves as a useful material to enhance the stiffness for the platform. The prototypes without the SR and with the embedded SR are given in Fig. 2a, b, respectively. The function of the SR is to increase the stiffness of the platform on both the x- and y-axes, particularly along the x-axis because the displacement along the y-axis is required for the platform. An increase in the stiffness leads to the enhanced frequency of the platform and, as a result, the speed of the platform is improved.

Prototype of flexure-based micropositioning platform: a without strain gauges and SR and b with embedded strain gauges and SR
The SR has the following mechanical properties: a Young’s modulus of 1.35, Poisson’s ratio of 0.49 and density of 0.91 g/cm3. In this study, SR had 45 mm in length, 8 mm in width and 2 mm thick is used to fill the cavities. As seen in Fig. 2b, the SR is bent along the profile of the cavity. The SR reinforces the stiffness and enhances the frequency of the developed platform because a higher frequency means a faster platform speed.
2.2 Working principle of micro-displacement sensor
The FMPP with embedded strain gauges serves as a micro-displacement sensor to directly measure the displacement. In this study, a half-Wheatstone bridge circuit is used, as shown in Fig. 3. The elastic theory of flexure hinges and the theory of the half-Wheatstone bridge circuit are combined to develop the mathematical equations of the proposed displacement sensor. As seen in Fig. 3, if the platform is under tension, the resistance R will increase by a value of ΔR. Conversely, in the case of compression, the resistance R will decrease by a value of ΔR.

Half-Wheatstone bridge circuit of the strain gauge
The gauge factor of the strain sensor is defined as the ratio of fractional change in the electrical resistance to the fractional change in length:
where G is the gauge factor of the strain gauge, ΔR is the change value of the gauge resistance, R is the nominal value of the gauge strain as un-deformed strain gauge and ε is the strain.
The strain is related to the resultant stress by the following equation:
where σ is the resultant stress and E is the Young’s modulus of the material Al 7075.
The output voltage of the circuit is approximated by the following equation:
where V o is the output of the circuit and V ex is the excitation voltage of the circuit.
Substituting Eqs. (1) and (2) into (3), the output voltage of the circuit is approximated by the following equation:
Equation (4) means that the output voltage is proportional to the resultant stress of the flexure hinges.
Group A is selected for the analysis of the sensitivity of the displacement sensor gauge. Each flexure hinge of the A group has the linear stiffness calculated as follows:
where K is the stiffness of the flexure hinge.
The force F y is related to the displacement δ of the flexure hinge by the following relation:
The force F y is related to the resultant stress of the flexure hinge by the relation:
The substituting of Eqs. (5), (6) and (7) into (4) leads to:
Eq. (8) is equivalent as below:
where S is the sensitivity of the strain gauge working as a displacement sensor is followed by:
Combining Eqs. (2) and (7), the strain is related to the geometric parameters of the flexure hinge as:
In fact, by determining the output displacement of the platform and the output voltage, the sensitivity S of the strain gauge can be determined via calibrations, which show that the output voltage of the strain gauge has a linear relation with the displacement of the platform. In addition, the sensitivity is related to the excitation voltage, the gauge factor and the geometric parameters of the platform. As seen from Eq. (11), the geometric parameters of the flexure hinge affect the strain significantly. After the working principle of the strain gauge sensor is determined, the suitable position of the strain gauges integrated on the substrate is determined by FEA simulations in the next step.
2.3 Determination of position of strain gauges
In general, the best position for the strain gauges on the substrate is required to achieve an accurate prediction for displacement. As mentioned, the A, B, C, E, and F groups have the same type of flexure hinge but different dimensions. Their deformations all affect the strain and stress distributions of the proposed FMPP. In this section, the most suitable positions to attach the strain gauges on the flexure hinges are described.
A simplified model of the flexure hinge for groups A, B, E and F is used to describe the best positions for the strain gauges, as shown in Fig. 4. The flexure hinge serves as the substrate on which the strain gauges are located. The glue and strain gauge can affect the deflection of the substrate; thus, they can also influence the stiffness of the substrate. However, the glue and strain gauge are very light in weight, so they were ignored in the FEA simulations in ANSYS 2016 software (ANSYS 2016). The solid model of the flexure hinge is constructed using Solidworks. Then, the automatic method is applied for meshing the model and the flexure hinge is refined to achieve the analysis accuracy. The 10-node tetrahedral structural solid element of the SOLID 92 type is adopted for the meshed model because this typeis well suited for irregular meshes.

Simplified model of flexure hinge with 1 mm applied load (l i , w i and t i are the length, width and thickness, respectively, of the flexure hinge)
As seen in Fig. 4, the model consists of two ends, M and N. On the left side, end M is a fixed position. On the right side, end N is the freedom location for applying a movable load. The freedom location applies a 1 mm load along the negative y-direction. The material Al 7075 is selected for the model. The geometric design parameters of the flexure hinge mainly affect the strain and stress. The length, width and thickness of the flexure hinge are l i , w i and t i , respectively (i = A, B, E, F). Regarding the A group, the parameters set for the simulations are as follows: l A = 20, 24, 27 and 30 mm; w A = 5, 6, 7 and 8 mm; and t A = 0.4, 0.5, 0.6 and 0.7 mm. Through the simulations, the most suitable positions for the sensor gauge locations are found. In practice, the strain gauge is attached at the top and bottom surfaces of the flexure hinge to measure the strain in the tension and compression directions, respectively. The strain in tension at the top surface is equal to the strain at the lower surface in the compression direction. On the top surface, the strain has a positive value; at the lower surface, the strain has a negative value.
As seen in Fig. 5, the strain was changed as a result of a change in the length of the flexure hinge. The maximum strain was at the left or right side of the flexure hinge. The lowest strain was at the middle point, number 10. The maximum strain corresponded to the minimum length of the flexure hinge, l A = 15 mm, followed by l A = 18 mm, l A = 21 mm and the lowest strain with respect to l A = 25 mm.It could be concluded that the strain distribution was mainly affected by the length of the flexure hinge. The strain gauge should be attached at the left end area M or around the right end area N where a load is applied. The width of the flexure hinge, however, had almost no effect on the strain, as evident in Fig. 6. A change in the width of the flexure hinge (w A = 5 mm, w A = 6 mm, w A = 7 mm, w A = 8 mm) did not affect the strain, an indication that the strain was not sensitive to changes in the width of the flexure hinge.

Strain distribution vs. the different lengths l A of group A

Strain distribution vs. different widths w A of group A
As shown in Fig. 7, the strain did vary with a change in the thickness of the flexure hinge, with the strain increasing as the thickness increased. The maximum strain was at the left or right side of the flexure hinge, and the lowest strain was at the middle point, number 10. The maximum strain corresponded to the maximum thickness of the flexure hinge, t A = 0.7 mm, followed by t A = 0.6 mm, t A = 0.5 mm and the lowest strain with respect to t A = 0.4 mm. It could conclude that the strain was very sensitive to any change in the length or thickness of the flexure hinge. The width did not affect the strain. Similarly, the effects of groups B, E and F were taken into account. For the B group, the parameters set for the simulations were as follows: l B = 7, 10, 13 and 17 mm; w B = 4.5, 5.5, 7.5 and 8 mm; and t B = 0.45, 0.55, 0.65 and 0.75 mm. As denoted in Figs. 8, 9 and 10, it revealed that the strain was only sensitive to any change in the length or thickness of the flexure hinge. The width did not affect the strain.

Strain distribution vs. different thicknesses t A of group A

Strain distribution vs. different lengths l B of group B

Strain distribution vs. different widths w B of group B

Strain distribution vs. different thicknesses t B of group B
For the E group, the parameters set for the simulations were as follows: l E = 22, 25, 28 and 31 mm; w E = 4.3, 5.3, 6.3 and 7.3 mm; and t E = 0.42, 0.52, 0.62 and 0.72 mm. It could be concluded that the strain was very sensitive to any change in the length or thickness of the flexure hinge. As denoted in Figs. 11, 12 and 13, it could be concluded that the strain was only sensitive to any change in the length or thickness of the flexure hinge. The width did not affect the strain.

Strain distribution vs. different lengths l E of group E

Strain distribution vs. different widths w E of group E

Strain distribution vs. different thicknesses t E of group E
For the F group, the parameters set for the simulations were as follows: l F = 42, 45, 48 and 51 mm; w F = 5.2, 6.2, 7.2 and 8 mm; and t F = 0.46, 0.56, 0.66 and 0.76 mm. It could be concluded that the strain was very sensitive to any change in the length or thickness of the flexure hinge. As denoted in Figs. 14, 15 and 16, it could be concluded that the strain was only sensitive to any change in the length or thickness of the flexure hinge. The width did not affect the strain.

Strain distribution vs. different length l F of flexure hinge F

Strain distribution vs. different width w F of group F

Strain distribution vs. different thicknesses t F of group F
To sum up, the length and thickness of the flexure hinge must be selected carefully and the strain gauges should be attached at suitable positions to obtain the necessary measurement accuracy.
3 Experimental tests
The design of the flexure micropositioning platform was evaluated via different experimental tests.
3.1 Strain–stress analysis
As per the above analysis, suitable positions were found for the strain gauges to be embedded in the platform. The strain is related to the stress through Hooke’s law. The stress is also related to the fatigue life by Eq. (12). For any compliant joints, fatigue is a major concern as it is induced by completely reversed stress because a flexible member frequently repeats its motion. This relation is briefly described as (Shigley and Mischke 1989):
where N is the number of cycles-to-failure, S ut is the ultimate strength, S e is the endurance strength limit and f is constant.
As a result, the strain of the FMPP is one of the most important concerns so that the maximum stress can be determined. In this study, the flexure hinges of groups A, B, E and F at the left side of the platform were tested. As the FMPP has a symmetric structure, only these positions were evaluated.
SR was integrated in the flexure micropositioning platform to reinforce its stiffness and thereby improve the frequency of the platform, as a higher frequency means a faster platform speed. The viscoelastic properties of the SR can affect the strain of the proposed platform; hence, many simulations and experiments were carried out to investigate these effects.
Figure 17 illustrates how the strain of the platform without the SR and with the embedded SR was measured. The calibration instruments included the force gage (model: NF-9500, maximum 196, DC 9 V, Lutron, Taiwan), used to generate the force F y to the platform to adjust the applied force; the sensor gauge, with an excitation voltage of 2.5 V; a CPU (computer processing unit, ASUS); DAQ (data acquisition, National International Instrument, Japan) and a screen (ASUS). The prototype was mounted on a base that was affixed to the vibration isolation system table in order to suppress any vibrations. Four sensor gauges were glued at the four positions to measure the actual strain. Each position was measured separately. The experiments were repeated five times to obtain the average value. The force gage was adjusted to gradually reach the values of 2.2, 4.6 and 7.8 N, respectively. Data from the sensor gauge was transferred to the DAQ instrument, which generated data to the CPU. LABVIEW® software was set up in the CPU so that the strain wave and the value of the strain were displayed on the screen. The strain value after each experimental measure was recorded.

Measured strain for flexure-based micropositioning platform (FMPP)
Then, a finite element analysis was conducted using ANSYS software to validate the experimental results. The automatic method was applied for meshing the model, and the flexure hinge was refined to achieve the necessary analysis accuracy, as shown in Fig. 18. The 10-node tetrahedral structural solid element of a SOLID 92 type was adopted for meshing the FMPP model. The boundary conditions are also denoted in this figure. As seen in Figs. 19 and 20, group B had the maximum stress distribution and maximum strain distribution, followed by groups A, E and F. It was also observed that the maximum displacement was focused on the mobile platform D, as given in Fig. 21.

Meshed model of flexure-based micropositioning platform

Stress distribution of flexure-based micropositioning platform

Strain distribution of flexure-based micropositioning platform

Displacement distribution of flexure-based micropositioning platform
Subsequently, many experiments were performed to determine the strain at groups A, B, E and F, and then the corresponding stresses were assessed. For position (7), the physical strain values with the embedded SR were about 16.63% lower than those and the FEA values without the SR, as seen in Fig. 22. The experimental results were in a good agreement with the FEA results, with an error of 1.31%.For position (8), the physical strain values with the embedded SR were about 31.62% lower than those and the FEA values without the SR, as seen in Fig. 23. The experimental results were in good agreement with the FEA results, with an error of 5.43%. For position (9), the physical strain values with the embedded SR were about 16.90% lower than those and the FEA values without the SR, as seen in Fig. 24. The experimental results were in good agreement with the FEA results, with an error of 5.60%. For position (10), the physical strain values with the embedded SR were about 21.26% lower than those and the FEA values without the SR, as seen in Fig. 25. The experimental results were in good agreement with the FEA results, with an error of 1.67%. For position (11), the physical strain values with the embedded SR were about 6.63% lower than those and the FEA values without the SR, as seen in Fig. 26. The experimental results were in good agreement with the FEA results, with an error of 2.64%. For position (12), the physical strain values with the embedded SR were about 20.80% lower than those and the FEA values without the SR, as seen in Fig. 27. The experimental results were in good agreement with the FEA results, with an error of 3.50%. To sum up, for group A, the maximum strain was at position (11).

Diagram of the strain vs. position (7) of group A in cases with filled SR and without SR

Diagram of the strain vs. position (8) of group A in cases with filled SR and without SR

Diagram of the strain vs. position (9) of group A in cases with filled SR and without SR

Diagram of the strain vs. position (10) of group A in cases with filled SR and without SR

Diagram of the strain vs. position (11) of group A in cases with filled SR and without SR

Diagram of the strain vs. position (12) of group A in cases with filled SR and without SR
For position (S1B), the physical strain values with the embedded SR were about 16.62% lower than those and the FEA values without the SR, as seen in Fig. 28. The experimental results were in good agreement with the FEA results, with an error of 1.43%. For position (S2B), the physical strain values with the embedded SR were about 31.96% lower than those and the FEA values without the SR, as seen in Fig. 29. The experimental results were in good agreement with the FEA results, with an error of 5.43%. It was noted that the maximum strain occurred at position (S2B).

Diagram of the strain vs. position (S1B) of group B in cases with filled SR and without SR

Diagram of the strain vs. position (S2B) of group B in cases with filled SR and without SR
For position (S1E), the physical strain values with the embedded SR were about 16.60% lower than those and the FEA values without the SR, as seen in Fig. 30. The experimental results were in good agreement with the FEA results, with an error of 1.41%. For position (S2B), the physical strain values with the embedded SR were about 30.89% lower than those and the FEA values without the SR, as seen in Fig. 31. The experimental results were in good agreement with the FEA results, with an error of 5.34%. It was noted that the maximum strain occurred at position (S2E).

Diagram of the strain vs. position (S1E) of group E in cases with filled SR and without SR

Diagram of the strain vs. position (S2E) of group E in cases with filled SR and without SR
For position (S1F), the physical strain values with the embedded SR were about 15.63% lower than those and the FEA values without the SR, as seen in Fig. 32. The experimental results were in good agreement with the FEA results, with an error of 1.52%. For position (S2F), the physical strain values with the embedded SR were about 30.81% lower than those and the FEA values without the SR, as seen in Fig. 33. The experimental results were in good agreement with the FEA results, with an error of 5.16%. It was noted that the maximum strain occurred at position (S2F).

Diagram of the strain vs. position (S1F) of group F in cases with filled SR and without SR

Diagram of the strain vs. position (S2F) of group F in cases with filled SR and without SR
According to Hook’s law, the stress was calculated by determining the strain in advance. The actual stress of the FMPP at different positions could then be calculated. After collecting data on the strain of different positions for groups A, B, C, E and F, their maximum stresses were compared. As seen in Table 1, the maximum stress occurred at position (S2B), followed by position (S2E), then position (11); the stress of group F was lowest. It was also revealed that the maximum strainwas at position (S2B), as compared with the other positions. Position (S2B) must be considered carefully because of its effect on the fatigue life of the platform according to Eq. (12). Regarding the relationship between the strain and stress with the voltage, voltage values from 0 to 0.6 V were applied to the piezoelectric actuator and the experiments were repeated, as in Fig. 17. The strain data were collected and the resulting stresses was computed. As shown in Fig. 34, the maximum strain occurred at position (S2B), followed by position (S2E), then position (11); the strain of group F was lowest. The maximum stress occurred at position (S2B), followed by position (S2E), then position (11); the stress of group F was lowest, as denoted in Fig. 35.

Strain distribution vs. voltage for positions (11) of group A, S2B of group B, S2E of group E and S2F of group F

Stress distribution vs. voltage for positions (11) of group A, S2B of group B, S2E of group E and S2F of group F
3.2 Stiffness analysis
The second purpose of the SR was to support the stiffness of the developed platform. In this approach, the stiffness of the elastic body resulted in a change in the dynamic response of the platform.
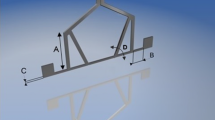
Many simulations and experiments were conducted to investigate this characteristic of the SR. Figure 36 depicts the experimental setup of the range of motion of the FMPP along the y-axis without the SR and with the filled SR, respectively. A force gage was used to make the necessary adjustments to achieve the different values, including 0.25, 0.5, 0.85 and 1.3 N. An end of the FMPP was fixed. A laser displacement sensor (Keyence, Japan) was used to measure the displacement of the FMPP and a connector was utilized to transfer the signal to a digital display. Each experiment was repeated four times and the average result was calculated.

Photograph of measured displacement along y-direction of flexure-based micropositioning platform
As seen in Table 2, the average stiffness in the case without the SR as about 0.002 N/µm, while the average stiffness in the case with the embedded SR was about 0.003 N/µm. It was concluded that the stiffness of the developed FMPP increased when the open cavities were embedded with the viscoelastic SR. The results provided helpful information regarding the design process of flexure-based micropositioning platforms; particularly, that the stiffness can be reinforced by the extra SR. The simulation results were close to the experimental results.
To prove that the stiffness of the platform actually increased, various simulations and experiments with a load along the x-axis were performed. For the experiments, the FMPP was affixed to the table. The force gage was employed to determine the different loads of 0.25, 0.5, 0.85 and 1.3 N on the x-axis. As the displacement of the FMPP along the x-direction could be less than that along the y-direction, greater loads were applied to the FMPP along the x-axis. The digital indicator was used to record the range of motion of the FMPP. The experimental displacement for the FMPP in the x-axis is shown in Fig. 37.

Photograph of measured stiffness along x-direction of flexure-based micropositioning platform
For the applied loads in the x-direction, the average stiffness without the SR was about 0.008 N/µm, while the average stiffness with the embedded SR was about 0.012 N/µm, as listed in Table 3. It was noted that the stiffness of the FMPP increased when the open cavities were embedded with the viscoelastic SR. The experimental results were in good agreement with the FEA results and proved that the SR increased the stiffness of the flexure-based micropositioning platform.
3.3 Frequency response
The dynamic response of the proposed FMPP was evaluated, the third purpose of the viscoelastic SR being to improve the frequency of the platform.
The measurements of the first natural frequency within the range of 100 Hz to 500 kHz were performed to evaluate the dynamic characteristics of the FMPP without pre-stress, i.e., no piezoelectric actuator (PEA). A modal hammer (Model 9722A2000-SN 2116555 from Kistler) was used to apply the excitation to the FMPP, and the frequency response was measured using an accelerator (Model 4744892 from Kistler). The accelerator was attached opposite to the location of the excitation of the modal hammer. A modal analyzer (Model NI USB 9162 from National Instruments) was utilized in the data acquisition and analysis. At the end of the hammer, a force sensor was attached to measure the applied force from the hammer. CUTPRO software was installed in a computer to analyze the data. The experiments were repeated five times. The experiments without PEA for without the embedded SR and with the embedded SR were carried out as per the steps illustrated in Fig. 38. The data are recorded in Table 4, and the results revealed the frequency in the case without the SR (109.8 Hz) to be lower than the case with the filled SR (110.3 Hz), showing that the SR increased the stiffness of the developed platform. To sum up, the response of the FMPP would also be faster.

Photograph of measured frequency of flexure-based micropositioning platform with activated hammer
Regarding the pre-stress, a high-speed bipolar amplifier (Model HAS 4011 from NF Corporation) was utilized to drive the PEA (Model 150/5/40 VS10 from Piezomechanik GmbH). Retro-reflective tape from Ono Sokki Company was attached at the middle of the movable object. A PEA (Model 150/5/40 VS10 from Piezomechanik GmbH) was used to generate the force to the mobile platform. A preload was applied on the PEA. A laser vibrometer sensor (Model LV-170 from Ono Sokki Company) with a high resolution on the nanoscale was used to measure the displacement. A frequency response analyzer (Model FRA 5097 from NF Corporation) was used. Frequency response analyzer display software was installed in the computer. Using the FRA display software, the data were displayed as diagrams. All experiments were repeated five times to obtain the average of the measured values.
The experiments with PEA without and with the embedded SR were conducted according to the steps as illustrated in Fig. 39. The data were recorded in Table 4 and diagrammed in Figs. 40 and 41. The results indicated the frequency in the case without SR (149 Hz) to be much lower than in the case with the filled SR (223 Hz), as the SR increased the stiffness of the FMPP.

Photograph of measured frequency of flexure-based micropositioning platform with piezoelectric actuator (PEA)

Frequency vs. displacement in case of piezoelectric actuator (PEA) without SR

Frequency vs. displacement in case of piezoelectric actuator (PEA) with filled SR
To sum up, the frequency increased when the SR was embedded in the open cavities. It could be concluded that the SR increased the stiffness. In reality, when a compliant positioning platform becomes stiffer, the frequency is also increased. Hence, the speed of the proposed platform was also enhanced and the platform operated at a higher frequency.
4 Fatigue and buckling analysis
A fatigue analysis was necessary in the design phase of the platform. To produce the desired range of motion along the y-axis of 660 µm for the FMPP, the fatigue life of the platform was predicted by an FEA simulation. The stress life analysis was conducted by constructing a model according to the optimal dimensions and applying a fully reversed load of 10 N. The FEA results predicted the maximum number of fatigue life cycles to be about 5.92 × 107 before the fatigue failure of the structure. Thus, the platform exhibited an approximately infinite life for producing a 660 µm range of motion. The analysis results of the equivalent stress indicated that the proposed FMPP achieved a large range of motion of 660 µm, with the maximum von Mises stress of 88.76 MPa without material failure (i.e., this maximum stress was still much less than the yield strength of 435 MPa of Al 7075). Thus, the proposed micro-platform possessed a good performance for micro manipulations.
The FMPP platform must be able to remain stable and to resist buckling under maximum compressive loading. A linear static buckling analysis was carried out by finite element method to obtain the buckling load. A displacement load of P = 660 µm was given to the D mobile platform. The solid model of the FMPP was drawn in Solidworks. The automatic method was used for meshing, and then all flexure hinges were refined to achieve the analysis accuracy. The 10-node tetrahedral structural solid element of the SOLID 92 type was adopted for the meshed model.
The eight holes of the FMPP platform were fixed. The critical buckling load P cr was obtained through ANSYS. Figure 42 shows the buckling deformation in the XY plane, where λ is the load multiplier, such that P cr /P = λ. The value of λ must be greater than 1 in order to avoid buckling, and the resistance to buckling increases with λ. The results indicated that the λ load multiplier of 216.92 as achieved was much larger than 1; thus, the λ the load multiplier was still large enough to prevent the buckling of the FMPP platform.

Buckling of flexure-based micropositioning platform with load multiplier λ of 216.92 using the maximum load p of 660 µm
5 Optimization
The analysis determined that the FMPP platform was very sensitive to the length and the thickness of the flexure hinges. Hence, the optimization problem was very necessary in order to optimize those parameters and improve the performances of the platform. In general, before implementation of an optimization problem, a mathematical model is established.
The FMPP platform was designed as a fixed-guided flexible mechanism; thus, its dynamic model was based on the pseudo-rigid-body model (PRBM) (Dao and Huang 2015a, b). As shown in Fig. 1, the mass of parts A, B, C, D, E and F are calculated as below
where M A , M B , M C , M D , M E , and M F are the corresponding mass of parts A, B, C, D, E, and F respectively. ρ is density of Al 7075 material, N A is the number of flexure hinges (16 elastic bodies) belong to part A. N B is the number of leaf spring B (4 elastic bodies). N C is the number of rigid links (2 bodies). N D is the number of mobile platform D (1 body). N E is the number of leaf spring E (2 elastic bodies). N F is the number of leaf spring F (2 elastic bodies).
The total mass M of the mechanism yields as follows
The natural frequency can retrieve from the dynamic equation of Lagrange principle. Assuming that the proposed platform is moving along y-axis, hence B part is assumed as ideal rigid links. Kinetic energy T of the platform is calculated as below
The potential energy V resulted by 40 torsional springs of flexure hinges according to the PRBM as follows
The dynamic stiffness K ds of each torsional spring is determined as below
where γ = 0.85, k Θ = 2.669. E is Young’s modulus of material Al 7075. I A is moment of inertia I A = w A t 3 A /12. θ z = y/2l A is the rotational angle along the z-axis.
Hence, the Eq. (23) becomes
To allow a free motion, the free motion dynamic equation is determined according to the Lagrange’s equation as
Equation (26) is equivalent as below
It is similar as
The stiffness of the platform is determined as follows
The natural frequency of the platform is calculated as
The displacement of the platform is determined as
where σ max is the maximum stress of the platform that is determined as
The objective functions of the platform are briefly described as follows: the FMPP platform needs a large range of motion δ along the y-axis and a high frequency f to increase the responding speed of the FMPP platform. The multi-objective optimization problem is stated as follows.
Subject to constraints:
where σ y is the yield strength of material Al 7075 (435 MPa), n is safety factor (n = 1.5). Because the FMPP platform was not sensitive to the change in width, thus for w A = w B = w C = w D = 8 mm, ρ = 2770 kg/m3.
In this study, differential evolution (DE) algorithm is used for solving continuous design variable optimization problems. It is a powerful technique proposed by Storn and Price (1995). With a randomly generated initial population, DE algorithm experiences step by step, including mutation, crossover, and selection operators. It discovers the best candidate solutions iteratively until the stopping criterion is satisfied. The following parameters are established for DE algorithm: the initial population size is 20 and the number of epochs is 100. The programing for multi-objective optimization problem based on DE algorithm in this study is executed in MATLAB R2015b. The optimal results are given in Table 5. The results revealed that the optimal parameters of the platform can be searched efficiently by using the differential evolution algorithm. The deviation between the predicted results and the experimental validations is less than 6%.
6 Conclusions
This paper has developed a new micro-displacement sensor for the compliant microgripper. The strain gauges embedded on the surfaces of the flexure hinges of the FMPP platform served to form a displacement gauge sensor. At the same time, the cavities were filled with SR which reinforced the stiffness of the platform. The response speed of the platform was improved as a result of the frequency of the FMPP being increased.
The results showed the length and the thickness to have the strongest effect on the strain and stress; in contrast, they were not sensitive to changes in the width. The results revealed that the performance values of the FMPP platform without the SR were lower than those of the FMPP platform with the embedded SR. The FEA results predicted the maximum number of fatigue life cycles to be about 5.92 × 107 before the fatigue failure of the structure. Thus, the FMPP exhibited an approximately infinite life for producing a large range of motion of 660 µm. It could conclude that the developed FMPP platform was capable of realizing the desired displacement with the embedded strain gauges. With the embedded SR, the stiffness of the FMPP was reinforced and the speed of the platform improved. The displacement and frequency are then optimized via using the differential evolution algorithm. The optimal dimensions of the FMPP were determined efficiently using the differential evolution algorithm. The simulation results were in good agreement with the experimental results. In future work, a real compliant gripper will be fabricated and tested to grasp various micro-sized objects.
References
ANSYS (2016) Workbench User’s Guide. ANSYS, Canonsburg, Pa, USA
Chen WL, Zhang XM, Fatikow S (2016) Design, modeling and test of a novel compliant orthogonal displacement amplification mechanism for the compact micro-grasping system. Microsyst Technol 2016:1–14
Choi KB, Lim HJ, Kim GH, Lee JJ (2014) A flexure-based scanner for a fully bidirectional operation driven by a differential piezo force. Instit Mech Eng Part C J Mech Eng Sci 228:3186–3199
Dao TP (2016) Multiresponse optimization of a compliant guiding mechanism using hybrid Taguchi-grey based fuzzy logic approach. Math Prob Eng 2016:1–17
Dao TP, Huang SC (2013a) An optimal study of a gripper compliant mechanism based on Fuzzy–Taguchi method. Appl Mech Mater 418:141–144
Dao TP, Huang SC (2013b) Design and analysis of compliant rotary joint. Appl Mech Mater 372:467–470
Dao TP, Huang SC (2015a) Robust design for a flexible bearing with 1-DOF translation using the Taguchi method and the utility concept. J Mech Sci Technol 29:3309–3320
Dao TP, Huang SC (2015b) Design, fabrication, and predictive model of a 1-dof translational, flexible bearing for high precision mechanism. Trans Canadian Soc Mech Eng 39:419–429
Guo Z, Tian Y, Liu C, Wang F, Liu X, Shirinzadeh B, Zhang D (2015) Design and control methodology of a 3-DOF flexure-based mechanism for micro/nano-positioning. Robot Comp-Integr Manufact 32:93–105
Huang SC, Dao TP (2016) Design and computational optimization of a flexure-based XY positioning platform using FEA-based response surface methodology. Int J Precis Eng Manufact 17(8):1035–1048
Huang J, Li Y (2010) Design and analysis of a completely decoupled compliant parallel XY micro-motion platform. Proceedings of the 2010 IEEE International Conference on Robotics and Biomimetics, Tianjin, China, pp 1008–1013
Li Y, Xu QA (2011) Novel piezoactuated XY platform with parallel, and stacked flexure structure for micro-/nanopositioning. IEEE Trans Industr Electron 58:3601–3615
Lin HR, Cheng CH, Hung SK (2015) Design and quasi-static characteristics study on a planar piezoelectric nanopositioner with ultralow parasitic rotation. Mechatronics 31:180–188
Polit S, Dong J (2009) Design of high-bandwidth high-precision flexure based nanopositioning modules. J Manuf Syst 28:71–77
Shigley JE, Mischke CR (1989) Mechanical engineering design. McGraw-Hill International Editions
Storn R, Price K (1995) Differential evolution-a simple and efficient adaptive scheme for global optimization over continuous spaces, vol 3. ICSI, Berkeley
Teo TJ, Yang G, Chen IM (2014) A large deflection and high payload flexure-based parallel manipulator for UV nanoimprint lithography: Part I Modeling and analyses. Precis Eng 38:861–871
Tsai CC, Lin SC, Huang HC, Cheng YM (2009) Design and control of a brushless DC limited-angle torque motor with its application to fuel control of small-scale gas turbine engines. Mechatronics 19:29–41
Xi X, Clancy T, Wu X, Sun Y, Liu X (2016) A MEMS XY-platform integrating compliant mechanism for nanopositioning at sub-nanometer resolution. J Micromech Microeng 26:025014
Acknowledgements
This research is funded by Vietnam National Foundation for Science and Technology Development (NAFOSTED) under Grant Number 107.01-2016.20.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Dao, TP., Ho, N.L., Nguyen, T.T. et al. Analysis and optimization of a micro-displacement sensor for compliant microgripper. Microsyst Technol 23, 5375–5395 (2017). https://doi.org/10.1007/s00542-017-3378-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00542-017-3378-9