
Abstract
A flexible capacitive tactile sensor with adjustable characteristics, i.e., measurement range and sensitivity, has been developed. The proposed sensor is designed for large pressure measurement; therefore, polydimethylsiloxane (PDMS) material is selected as the material of the dielectric layer between the parallel plate electrodes of the sensor. Since the elasticity of the PDMS material can be adjusted by the mixing ratio of PDMS pre-polymer and curing agent during formation, sensors in different measurement ranges, i.e., 240–1,000 and 400–3,000 kPa, and corresponding sensitivities, i.e., 2.24 and 0.28 %/MPa, were respectively constructed and demonstrated. These measurement ranges are suitable for most of the biomechanical applications, especially for plantar pressure measurement. Moreover, because the output of the sensor, i.e., capacitance, is highly influenced by the dimension of the sensor structure, each sensor consists of four independent capacitance elements. The output of each sensor is averaged by four capacitances for single force measurement. This could improve the measurement accuracy in practical situation. Also, linearity of the measurement response could be enhanced and it was shown by the R-squared values in two measurement ranges, i.e., 0.9751 and 0.9881, respectively. The proposed sensor is flexible and miniaturized and has the potential to be applied to biomechanical applications.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Gait analysis is an important tool for the assessment of patients associated with knee steoarthritis and stoke (Deluzio and Astephen 2007; Goldie and Matyas 1996). Conventionally, visual observation by clinician is commonly used. However, this method highly relies on the professional training of the clinician and the observation results are not quantitative. It is unreliable and difficult to compare across multiple visits. Therefore, some equipment have been launched to provide well-quantified and repeatable results for gait analysis, for example motion tracking system (Reid et al. 2010) and pressure mat (Mizelle et al. 2006; Caselli et al. 2002). However, they are expensive and require to be installed in a laboratory. For long-distance and long-run gait analysis, shoe-integrated sensor system would be an alternative solution (Bamberg et al. 2008; Chelius et al. 2011). The system can directly measure the plantar pressure distribution based on the force-sensitive resistors (FSRs) integrated into the shoe. The technique provides clinicians and patients new opportunities for diagnosis and treatment of chronic walking problems.
To measure the pressure distribution for long-distance walking, tailor-made shoe-pads integrated by commercial available tactile sensors were utilized recently (Bamberg et al. 2008; Chelius et al. 2011). FSR is one of the most commonly used tactile sensors because of its simple structure and low manufacturing cost. However, because of the characteristic of the resistive material, the measurement results are highly influenced by temperature. Practically, calibration of the FSR is required in the beginning of every measurement. Also, resistive material is brittle and has limited bending curvature. Applications in challenging environment such as shoe while walking are not appropriate if durability is a concern. Therefore, tactile sensor based on capacitive sensing mechanism is an alternative sensing scheme and was reported in the literature (Lee et al. 2006, 2008; Cheng et al. 2009, 2010; Kim et al. 2011; Muhammad et al. 2011; Petropoulos et al. 2009; Chiang et al. 2007; Peng et al. 2009). The parallel plate capacitive principle is basically used for the construction of the tactile sensors. When the sensor is compressed by external force, the distance of two parallel plates decreases leading to the change of its capacitance. Hence, the measurement result, i.e., external force, can be estimated by the capacitance change and the influence from temperature can be minimized. Although the dielectric constant of the material between two parallel plates is influenced by temperature as well, but it is much lower than the resistive material. The resistive sensor has a problem of relatively high sensitivity to temperature. Temperature compensation circuit is commonly used with the piezoresistive sensor (Akbar and Shanblatt 1992, 1993). Capacitive sensor was reported to have an order of magnitude reduction in temperature sensitivity (Lee and Wise 1982). A number of capacitive sensors were reported recently. For example, a flexible capacitive tactile sensing module was developed using polydimethylsiloxane (PDMS) as the structural material and air gap as the dielectric layer (Lee et al. 2006). There were 16 × 16 sensing elements integrated into a single module. The spacial resolution was 1 mm which is similar to the human skin. The sensing module was assembled on the robot skin for tactile sensing. The sensor showed a sensitivity of 3 %/mN within the full scale range of 250 kPa. Another example of tactile sensing module was fabricated by using flexible printed circuit board (FPCB) technology (Cheng et al. 2009). Because the tactile sensors are frequently compressed by external forces, the electrical connections among the sensing elements are required to be durable. FPCB provides a durable and simple solution for electrical connections and can also work as the substrate of tactile sensors. The sensing module was developed for the artificial skin of robot hand. The sensitivity of the sensor was about 2.27 %/kPa and the minimum resolvable force was about 38 mN. Moreover, a transparent and sensitive tactile sensing module was reported and demonstrated on the multi-touching panel application (Kim et al. 2011). The sensor was using polycarbonate (PC) as the substrate and indium-zinc-oxide (IZO) as the electrode. The spacial resolution was 2 mm and the transparent rate was 86 %. The sensitivity of the sensor was 4 %/mN within the full scale range of 0.3 N. These excellent demonstrations showed the possibility of tactile sensors using capacitive sensing mechanism. However, few studies have been reported to the flexible capacitive tactile sensor for the measurement of large pressure range in biomechanical applications.
In this work, a flexible capacitive tactile sensor is described for the measurement of large pressure range, which is suitable for many biomechanical applications, e.g., plantar pressure measurement (interfacial pressure between the bottom surface of the foot and a solid surface). More recently, we have demonstrated the use of PDMS material as the dielectric layer to develop a flexible capacitive tactile sensor (Lei et al. 2012). A stiffer PDMS dielectric layer was used in order to have a large measurement range. But large standard deviation and low sensitivity was the trade-off. Nevertheless, the proof-of-concept study did not present a robust and adjustable measurement range sensor for most of the biomechanical applications. Because the measurement range is varied by different biomechanical applications, e.g., typically 1,000 kPa for plantar pressure measurement but 3,000 kPa for an extreme case (Urry 1999), the current tactile sensor is designed with adjustable measurement range and sensitivity, which can be adjusted through the construction of the sensor. Compared with our previous work (Lei et al. 2012), the current sensor is more sensitive and robust. In this design, PDMS is used for the structural layer of the sensor because it has adjustable elasticity which can be defined in the formation process. Also, it has higher dielectric constant than air; therefore, the initial capacitance of the sensor is higher than the conventional design, i.e., air gap as the dielectric layer. In this work, design and fabrication of the flexible capacitive tactile sensor are described. In order to enhance the measurement accuracy in practical situation and linearity of the measurement response, the sensor is designed to be constructed by four independent capacitance elements. The output of the sensor is averaged by four capacitances. Sensors in different measurement ranges, i.e., 240–1,000 and 400–3,000 kPa, and corresponding sensitivities, i.e., 2.24 and 0.28 %/MPa, were respectively constructed and demonstrated. Linearity of the measurement response was respectively shown by the R-squared values, i.e., 0.9751 and 0.9881. The proposed sensor is flexible and miniaturized and the measurement ranges are suitable for most of the biomechanical applications, especially for plantar pressure measurement.
2 Design
The proposed flexible capacitive tactile sensor is designed for the measurement of large pressure range in biomechanical applications. For example, pressure between foot and walking surface for foot ulceration prediction of diabetic patients is up to 1,000 kPa (Caselli et al. 2002). In this work, PDMS material is used for the compressive layer instead of using air chamber in the conventional design (Lee et al. 2006; Cheng et al. 2009; Kim et al. 2011). Large pressure measurement can be achieved and the characteristics of the sensor are adjustable. Moreover, because the output of the sensor, i.e., capacitance, is highly influenced by the dimension of the sensor structure, each sensor is designed to be constructed by four independent capacitance elements. The output of each sensor is averaged by four capacitances for a single measurement. This could improve the measurement accuracy in practical situation and linearity of the measurement response.
The proposed sensor is composed of lower electrode layer, PDMS dielectric layer, upper electrode layer, and PDMS bump layer. The lower layer and upper layer are FPCB which provide the parallel plate electrodes and the electrical connections. The PDMS dielectric layer is located between the parallel plate electrodes and also works as a structural layer. The bump layer is a half sphere (ϕ: 4 mm, H: 1.5 mm) which provides a point contact between the applied contact force and the sensor in order to have even pressure distribution. Compared with the structure of conventional design, i.e., air gap as the dielectric layer, the proposed sensor using PDMS dielectric layer has the advantages of simple structure and easy fabrication. Moreover, PDMS has high dielectric constant, i.e., 2.7, which provides high initial capacitance of the sensor output. The parallel plate capacitance can be theoretically calculated by
where ε 0 is electric constant (8.854 × 10−12 F/m), ε r is dielectric constant of PDMS (2.7), t is the thickness of the dielectric layer, and A is the area of the effective parallel plate electrodes. Also, the elasticity of the PDMS can be adjusted by the mixing ratio of the PDMS pre-polymer and the curing agent during formation. We adopt this advantage to adjust the measurement range and sensitivity of the tactile sensor. Furthermore, by using FPCB, the electrodes are highly flexible, crack-free, and durable when applying external force on the sensor. The design of the sensor is illustrated in Fig. 1 and the size of each sensor is 6 × 6 mm2. The working principle of the sensor is based on the classical parallel plate capacitance theorem. When an external force is applied on the sensor, the thickness of the dielectric layer is reduced leading to the capacitance change measured across the parallel plate electrodes. External force can be estimated by the analysis of the capacitance change.

Illustration of the design of the capacitive tactile sensor
3 Fabrication
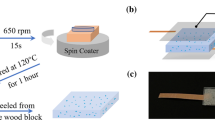
The fabrication process of the sensor is illustrated in Fig. 2 and divided into four parts: (a) fabrication of the lower electrode layer with dielectric layer, (b) fabrication of the upper electrode layer, (c) fabrication of the bump layer, and (d) assembly of the sensor. FPCB (Taiflex Scientific Co., Ltd., Taiwan), which is copper coated polyimide film, was used for the material of the upper and lower electrode layers and its thickness is 50 μm. Because FPCB is flexible, it is required to fix on a solid support for standard microfabrication process. A thin layer of PDMS (Sylgard® 184 from Dow Corning, USA) was spin-coated on a glass substrate and FPCB was applied on the substrate carefully. After baking at 70 °C for 1 h, FPCB can be fixed on the glass substrate for further fabrication process. Hence, upper and lower electrodes on the FPCB were respectively fabricated by standard photolithography. Then, PDMS with a certain mixing ratio was spin-coated on the lower electrode layer to form the dielectric layer. The elasticity of the PDMS is determined by the mixing ratio of PDMS pre-polymer and curing agent and will be described in the next section. The thickness of the dielectric layer was 90 μm and can be controlled by the spinning speed. The relationship between the PDMS thickness and the spinning speed was experimentally calibrated. The spinning duration was fixed at 30 s. Three independent calibration experiments were conducted and the relationship is shown in Fig. 3. In our study, the spinning speed was 800 rpm in order to form the 90 μm thick PDMS dielectric layer on the lower electrode layer. PDMS mixture in different mixing ratios has similar thickness under the same spinning speed because the viscosity of the PDMS mixture does not change much. Hence, the PDMS dielectric layer was solidified on an elevated surface by baking at 70 °C for 1 h. Therefore, the lower electrode layer with PDMS dielectric layer and the upper electrode layer were prepared. For the fabrication of the bump layer, PDMS spherical structure was fabricated by molding using a polymethyl methacrylate (PMMA) mold fabricated by micro-machining equipment. Then, the sensor was assembled by bonding each layer using a thin layer of PDMS as adhesive layer. This bonding technique was reported to achieve high bonding strength (Chow et al. 2006). Since the adhesive layer is thin (<5 μm) and is made of PDMS (same material as the dielectric layer), such extra layer should not affect the measurement accuracy from different sensors. Briefly, the lower electrode layer with PDMS dielectric layer was first coated by a thin adhesive layer of PDMS using spin coating at 3,000 rpm. Then, the upper electrode layer was applied to the PDMS dielectric layer with proper alignment. The adhesive layer was solidified by baking at 70 °C for 1 h. Similar process was performed to bond the bump layer to the electrode layers. Finally, the sensor was fabricated by removing the glass substrate. Moreover, a sensing module of an array of 3 × 3 sensors can be also fabricated by the same fabrication procedure. The pattern of the upper and lower electrodes and the PMMA mold of the bumps were designed as a 3 × 3 array. Photography of the capacitive tactile sensing module is shown in Fig. 4.

Fabrication process of the sensor. a Fabrication of the lower electrode layer with dielectric layer. b Fabrication of the upper electrode layer. c Fabrication of the bump layer. d Assembly of the sensor

Relationship between the PDMS thickness and the spinning speed. The spinning duration was fixed at 30 s. PDMS was prepared in the mixing ratio of 10:1 of PDMS pre-polymer and curing agent

a Illustration of a single capacitive tactile sensor. b Photography of the 3 × 3 array of the bumps and the electrodes. c Photography of the flexible capacitive tactile sensing module
4 Design of the elasticity of PDMS material
In the PDMS formation process, PDMS mixture is first prepared by thoroughly mixing the PDMS pre-polymer and curing agent in a certain weight ratio. Then, the PDMS material is ready after baking at 70 °C for 1 h. The most widely used mixing ratio of PDMS pre-polymer and curing agent is 10:1 according to the manufacturer’s instruction. However, elasticity of PDMS can be adjusted by different mixing ratios during formation. In this work, because the PDMS dielectric layer also worked as the structural layer of the sensor, elasticity of the layer can influence the measurement range and the sensitivity of the sensor. Investigation of the elasticity of PDMS material under different mixing ratios was performed to understand the stress–strain relationship of the material.
PDMS mixtures in 11 mixing ratios of the PDMS pre-polymer and curing agent were respectively prepared for the material testing experiment. Eleven mixing ratios were selected as 10:1, 12:1, 14:1, 16:1, 18:1, 20:1, 22:1, 24:1, 26:1, 28:1, and 30:1. PMMA cylindrical molds of 12 mm in diameter and 13 mm in height were fabricated for molding the PDMS specimens. PDMS mixtures were poured into the PMMA molds and baked at 70 °C for 1 h, respectively. After de-molding, eleven cylindrical PDMS specimens in respective mixing ratios were fabricated and ready for the material testing. The elasticity of the PDMS specimens was measured by a material testing equipment (5544, Instron Inc.). Constant z-axis displacement testing mode was conducted to investigate the stress–strain property of the PDMS in different mixing ratios. The PDMS specimen was compressed by the equipment and pressure and displacement of the specimen were recorded. The sampling frequency was 5 Hz and the measurement repeated three times for each specimen. During the measurement, the specimens were in elastic region, i.e., reversible deformation. The measurement results, stress–strain (σ–ε) curves, were plotted in Fig. 5 under 11 mixing ratios. It is expected that the elasticity increases by the increase of the portion of the PDMS pre-polymer. Moreover, the stress–strain relationship becomes non-linear when the PDMS specimens with high portion of the PDMS pre-polymer. Selection of the linear range for the definition of the measurement range of the sensor can be based on the stress–strain curves. Because the PDMS dielectric layer was the structural layer of the sensor; therefore, the measurement range and sensitivity of the sensor can be adjusted by the mixing ratios of the PDMS during formation.

The stress–strain (σ–ε) curves of the PDMS specimens under different mixing ratios of PDMS pre-polymer and curing agent (10:1, 12:1, 14:1, 16:1, 18:1, 20:1, 22:1, 24:1, 26:1, 28:1, and 30:1)
5 Results and discussion
The capacitive tactile sensor was characterized by the experimental setup shown in Fig. 6. A force gauge with force resolution of 0.01 N (HF-10, Japan Instrumentation System) was attached on a z-axis moving stage (JSV-H1000, Japan Instrumentation System) for the force application and measurement. The sensor was mounted on the stage aligned with the force gauge using a precision x–y table. The sensor output, i.e., capacitances, was measured by a capacitance meter (9216A, Protek). The measurement was conducted by applying force on the sensor through the force gauge actuated by the z-axis of the moving stage. While the force gauge contacted to the bump of the sensor, the bump was pushed and the dielectric layer of the sensor was compressed. The distance between two parallel electrodes was changed and induced the change of the measured capacitance. The applied force and capacitance change can be measured by the force gauge and the capacitance meter, respectively. The stress was calculated by the applied force over the circular bump area.

Illustration of the experimental setup. The tactile sensor was mounted on the moving stage. The applied force and capacitance change were measured by the force gauge and capacitance meter, respectively
Because of the limitation of the fabrication processes, true even thickness of the PDMS dielectric layer and exact size of all electrodes might not be achieved easily. During the PDMS solidification process, true horizontal plane is required for fabricating the dielectric layer with even thickness. Fabrication of all electrodes in exact size is difficult to be realized using the in-house fabrication facility. Therefore, these defects would induce the inaccurate measurement. In order to improve the yield rate of the sensor fabrication and measurement accuracy, four independent capacitance elements, i.e., C11, C12, C21, and C22, were proposed to construct one tactile sensor for the force measurement. The effects from thickness variation of dielectric layer and inexact electrode sizes in each sensor could be reduced by averaging the measurement outputs from four capacitance elements.
In this study, two mixing ratios, i.e., 30:1 and 24:1, of the PDMS materials were prepared for the construction of the dielectric layer of the tactile sensors. In each mixing ratio, three identical sensors were fabricated for three independent measurements. The measurement results of the capacitance change of four capacitance elements in each sensor are respectively shown in Figs. 7 and 8. The inconsistence of four capacitance elements might be caused by the thickness variation and the non-homongenrity of the PDMS dielectric layer. However, the trends of four capacitance changes were consistent with the increase of the applied force. Figure 9 reveals the measurement range, sensitivity, and linearity of the sensors. The capacitance changes of the sensors were averaged from the capacitance changes produced by four capacitance elements in a single sensor. The measurement range and sensitivity depended on the elasticity of the PDMS dielectric layer. Since the nonlinearity of the PDMS stress–strain curves (Fig. 5) was found for the PDMS materials in 24:1 and 30:1, the relative linear regions, i.e., >240 kPa for 30:1 and >400 kPa for 24:1, were selected to define the measurement range of the sensors. Such regions are reasonable for the construction of the tactile sensors used in biomechanical applications, e.g., plantar pressure measurement. The small stress region of the plantar pressure is not interested even the pressure contributed by the body weight does not fall into this region. For example, a healthy person of 75 kg body mass is standing on only one foot. If pressure is evenly distributed, the interfacial pressure is approximately 300 kPa. The measurement range and sensitivity were 240–1,000 kPa and 2.24 %/MPa for the sensors with the PDMS dielectric layer in 30:1, and 400–3,000 kPa and 0.28 %/MPa for 24:1, respectively. Linearity of the measurement response was respectively shown by the R-squared values, i.e., 0.9751 and 0.9881. PDMS dielectric layer in 24:1 was stiffer than 30:1 and sensors in different measurement range can be developed for different biomechanical applications.

The capacitance change of the sensor under pressure. The PDMS dielectric layer of the sensor was prepared by the mixing ratio of 30:1 during formation. The capacitance values of four capacitance elements, i.e., C11, C12, C21, and C22, in a single sensor were measured under the applied force. Error bars represent the standard deviation of three repeated measurements

The capacitance change of the sensor under pressure. The PDMS dielectric layer of the sensor was prepared by the mixing ratio of 24:1 during formation. The capacitance values of four capacitance elements, i.e., C11, C12, C21, and C22, in a single sensor were measured under the applied force. Error bars represent the standard deviation of three repeated measurements

The measurement range, sensitivity, and linearity of the sensors. The capacitance changes of the sensors were averaged from the capacitance changes produced by four capacitance elements in a single sensor. Two mixing ratios, i.e., 30:1 and 24:1, of the PDMS materials were prepared for the construction of the dielectric layer of the tactile sensors
6 Conclusion
A flexible capacitive tactile sensor with adjustable characteristics was developed for biomechanical applications. Because PDMS material has the advantages of high dielectric constant and adjustable elasticity, it was selected as the material of the dielectric layer for the sensor. In this work, PDMS materials were prepared by two different mixing ratios, i.e., 24:1 and 30:1, during formation. Sensors in different measurement ranges, i.e., 240–1,000 and 400–3,000 kPa, and corresponding sensitivities, i.e., 2.24 and 0.28 %/MPa, were respectively constructed and demonstrated. Moreover, linearity of the measurement response could be achieved and it was shown by the R-squared values in two measurement ranges, i.e., 0.9751 and 0.9881, respectively. The proposed sensor using PDMS dielectric layer has the advantages of simple structure and easy fabrication. Also, PDMS has high dielectric constant for increasing the initial capacitance for the sensor output. Moreover, FPCB was used to construct the sensor and is highly flexible, crack-free, and durable. The proposed sensor is miniaturized and suitable for the large pressure measurement in most of the biomechanical applications.
References
Akbar M, Shanblatt MA (1992) Temperature compensation of piezoresistive pressure sensors. Sensors Actuators A Phys 33:155–162
Akbar M, Shanblatt MA (1993) A fully integrated temperature compensation technique for piezoresistive pressure sensors. IEEE Trans Instrum Meas 42:771–775
Bamberg SJM, Benbasat AY, Scarborough DM, Krebs DE, Paradiso JA (2008) Gait analysis using a shoe-integrated wireless sensor system. IEEE Trans Inf Technol Biomed 12:413–423
Caselli A, Pham H, Giurini JM, Armstrong DG, Veves A (2002) The forefoot-to-rearfoot plantar pressure ratio is increased in severe diabetic neuropathy and can predict foot ulceration. Diabetes Care 25:1066–1071
Chelius G, Braillon C, Pasquier M, Horvais N, Gibollet RP, Espiau B, Coste CA (2011) A wearable sensor network for gait analysis: a six-day experiment of running through the desert. IEEE Trans Mechatron 16:878–883
Cheng MY, Huang XH, Ma CW, Yang YJ (2009) A flexible capacitive tactile sensing array with floating electrodes. J Micromech Microeng 19:115001
Cheng MY, Lin CL, Lai YT, Wang YJ (2010) A polymer-based capacitive sensing array for normal and shear force measurement. Sensors 10:10211–10225
Chiang CC, Lin CCK, Ju MS (2007) An implantable capacitive pressure sensor for biomedical applications. Sens Actuators A Phys 134:382–388
Chow WWY, Lei KF, Shi G, Li WJ, Huang Q (2006) Microfluidic channel fabrication by PDMS-interface bonding. Smart Mater Struct 15:S112–S116
Deluzio KJ, Astephen JL (2007) Biomechanical features of gait waveform data associated with knee osteoarthritis: an application of principal component analysis. Gait Posture 25:86–93
Goldie PA, Matyas TA (1996) Deficit and change in gait velocity during rehabilitation after stroke. Arch Phys Med Rehabil 77:1074–1082
Kim HK, Lee S, Yun KS (2011) Capacitive tactile sensor array for touch screen application. Sens Actuators A Phys 165:2–7
Lee YS, Wise KD (1982) A batch-fabricated silicon capacitive pressure transducer with low temperature sensitivity. IEEE Trans Electron Devices 29:42–48
Lee HK, Chang SI, Yoon E (2006) A flexible polymer tactile sensor: fabrication and modular expandability for large area deployment. J Microelectromech Syst 15(6):1681–1686
Lee HK, Chung J, Chang SI, Yoon E (2008) Normal and shear force measurement using a flexible polymer tactile sensor with embedded multiple capacitors. J Microelectromech Syst 17(4):934–942
Lei KF, Lee KF, Lee MY (2012) Development of a flexible PDMS capacitive pressure sensor for plantar pressure measurement. Microelectron Eng 99:1–5
Mizelle C, Rodgers M, Forrester L (2006) Bilateral foot center of pressure measures predict hemiparetic gait velocity. Gait Posture 24:356–363
Muhammad HB, Recchiuto C, Oddo CM, Beccai L, Anthony CJ, Adams MJ, Carrozza MC, Ward MCL (2011) A capacitive tactile sensor array for surface texture discrimination. Microelectron Eng 88:1811–1813
Peng P, Rajamani R, Erdman AG (2009) Flexible tactile sensor for tissue elasticity measurements. J Microelectromech Syst 18(6):1226–1233
Petropoulos A, Kaltsas G, Goustouridis D, Gogolides E (2009) A flexible capacitive device for pressure and tactile sensing. Proced Chem 1:867–870
Reid SM, Graham RB, Costigan PA (2010) Differentiation of young and older adult stair climbing gait using principal component analysis. Gait Posture 31:197–203
Urry S (1999) Plantar pressure-measurement sensors. Meas Sci Technol 10:R16
Acknowledgments
Authors would like to thank the Chang Gung University for the financial support (Project number: UERPD2A0101).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Lei, K.F., Lee, KF. & Lee, MY. A flexible PDMS capacitive tactile sensor with adjustable measurement range for plantar pressure measurement. Microsyst Technol 20, 1351–1358 (2014). https://doi.org/10.1007/s00542-013-1918-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00542-013-1918-5