
Abstract
Disturbance-observer-based adaptive neural control approach is proposed for nonlinear systems. Considering the effect caused by long input delay and dead-zone, a novel auxiliary system has been introduced to degrade the design difficult. Based on the auxiliary system, a novel disturbance observer is developed to estimate the unknown time-varying external disturbance and the approximation error. What is more, the priori knowledge on the boundary of the disturbance and approximation error is not required for the disturbance observer. The “explosion of complexity” problem has been overcome by using dynamic surface control (DSC) scheme. By combing DSC scheme with backstepping technique, an adaptive neural dynamic surface controller is correctly devised to improve the disturbance rejection performance of the closed-loop system. Finally, the simulations of two examples show the superiority of the proposed scheme.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Over the past years, many meaningful results have been proposed for nonlinear systems control in [1,2,3]. However, most of these results are obtained on the premise that the uncertain nonlinearity in system are known or bounded by known nonlinear functions. It should be pointed out that this assumption is not applicable to practical applications, because it is difficult to get the accurate system model or the information of the nonlinear term in practice. To overcome this drawback, the neural networks (NNS) and fuzzy logic systems (FLS) are introduced to construct the adaptive controller by combing the adaptive backstepping method in [4,5,6,7,8,9,10]. However, in the process of backstepping design, the “explosion of complexity” increases sharply with repeating differentiation of the virtual controller in the aforementioned results. Thus, the DSC scheme was proposed in [11] and many meaningful research results have been developed for strict-feedback nonlinear systems in [12,13,14,15,16,17]. However, some common phenomena such as external disturbance [18, 19], time delay [20, 21] and non-smooth nonlinearity [22, 23] bring great challenges to the controller design of strict-feedback nonlinear systems.
In general, many actual systems often suffer from different external disturbances. These disturbances are usually time-varying and unknown. As a result, it is difficult to obtain their accurate information, and the difficulty of system control increases sharply. The disturbance can break the control performance of the closed-loop system and even lead to disastrous results. Thus it is necessary to consider the external disturbance rejection performance of the closed-loop system. The authors in [24] first proposed the disturbance-observer-based control (DOBC) strategy. Unlike the general adaptive control approach, the disturbance observer (DO) can estimate the external disturbance and provide valuable information for control law design. Consequently, the robustness of the closed-loop system is improved effectively by using DOBC strategy. Inspired by the idea of DOBC, [25,26,27] proposed adaptive sliding terminal control scheme for strict-feedback nonlinear systems. Furthermore, considering mismatched disturbances, [28,29,30] proposed the disturbance rejection scheme for nonlinear systems. Recently, based on DOBC [31,32,33] proposed adaptive neural/fuzzy control for strict-feedback nonlinear systems, respectively. It should be noted that the imperfections are unavoidable in the practical production processes [34]. For instance, the authors in [35] proposed a control scheme for imperfect electromechanical round system. Furthermore, an optimal control approach for imperfect electronic circuits system was considered in [36]. Although the real devices still operate well in regimes far from ideality, the usual control approaches may useless. In addition, the dead-zone problem has not been considered in the aforementioned results. In contrast to time-varying external disturbance, the input dead-zone is a typical non-smooth nonlinearity problem, which often occurs in many physical components of control systems [37]. However, the control forces provided by the actuators are limited in practice. Thus, the output provided by the disturbance observer cannot be effective utilized by the control signal when the input dead-zone appears. As a result, the closed-loop systems will be unstable or even disastrous if the input dead-zone is ignored. Recently, in order to solve the problem of dead-zone in nonlinear systems, many meaningful results have been developed by the researchers in [38,39,40,41]. Although the input dead-zone problem has been widely studied by the researchers, these issues rarely considered in the DOBC scheme. In addition, the control schemes proposed in the aforementioned results cannot be extended to strict-feedback nonlinear systems with unknown time-varying external disturbance and input dead-zone.
On the other hand, as a kind of time delay, input delay is a common and inevitable phenomenon in practical control systems [42,43,44]. When input delay occurs, the performance of the closed-loop system will be damaged or even be disastrous if the control signal cannot feedback the information provided by the observer in time. However, the traditional state delay control methods proposed in [45,46,47] cannot be directly used to solve input delay. For nonlinear systems with input delay, the authors in [48] extended the predictor-based control approach to tackle input delay. However, for the predictor-based control method, the state of system is difficult to predict. In recent years, based on FLS and the idea of Pade approximation, [49] considered input delay and output constraint for strict-feedback nonlinear systems. Furthermore, considering strict-feedback nonlinear with state constrained and input delay, [50] proposed an adaptive tracking control approach by combing Pade approximation and NNS with adaptive backstepping technique. Later, the authors in [51, 52] developed a compensation mechanism or combing compensation mechanism with Pade approximation to degrade the effect of the input delay. Nevertheless, the Pade approximation approach is invalid for long input delay. In addition, most of existing results are invalid for strict-feedback nonlinear systems with time-varying external disturbance, input delay and dead-zone, simultaneously. Recently, [53] considered the input saturation, input delay and external disturbance for state constrained strict-feedback nonlinear systems. Unfortunately, if the long input delay or the dead-zone problem occurs the proposed method in [53] is invalid. Since input dead-zone and input delay are common phenomena in practical systems, the disturbance rejection ability is more in line with the robust performance requirements of the closed-loop system, it is a significant issue to consider strict-feedback nonlinear systems with time-varying external disturbance, input dead-zone and input delay. However, the aforementioned results cannot be directly generalized to this issue, which prompted us to carry out our research.
The aforementioned observation motivates us to discuss disturbance-observer-based adaptive neural dynamic surface control for strict-feedback nonlinear systems with time-varying external disturbance, input dead-zone and input delay. The main work of this paper is listed as follows:
-
(1)
Taking into account the effect caused by long input delay and dead-zone, a novel auxiliary system is introduced for the first time to degrade the design difficulty in each step. Compared with [49,50,51,52,53] the proposed method can tackle the long input delay.
-
(2)
DSC is introduced to tackle the “explosion of complexity” problem in each backstepping step, which can reduce the burden of computation. The radial basis function neural networks are introduced to approximate the unknown nonlinear functions.
-
(3)
Based on the proposed auxiliary system, a novel adaptive disturbance observer is introduced for the first time to estimate the unknown time-varying external disturbance and approximation error in each backstepping step. Unlike the usual disturbance observer, the boundary information of the time-varying external disturbance or approximate error is not required for the disturbance observer design. Compared with [28,29,30,31,32,33], the proposed method which not only estimates the unknown time-varying external disturbance and the approximation error caused by the NNS, but also eliminates the effect caused by input delay and dead zone. Furthermore, the closed-loop systems show better robust performance.
The reminder of this paper is organized as follows: Section 2 presents the problem and the preliminary results. Section 3 discusses the design process of the controller and the stability analysis. The simulation examples are considered in Sect. 4. Finally, a brief conclusion is given in Sect. 5.
2 Preliminary
2.1 Problem formulation
Consider the strict-feedback nonlinear system as
where the state variable \({\bar{x}}_{i}(t) = [x_1 (t),x_2 (t), \cdots ,x_i (t)]^T \in R^{i}, i=1,2,\cdots ,n \), \(D(v(t - \tau ) ) \in R\) denotes the control input with input dead-zone and delay, where \(\tau \) represents the known constant or time-varying input delay, the system output \(y(t) \in R \). For \( 1 \le i \le n \) , \(f_i ( \cdot )\) is unknown smooth nonlinear function, \(d_i(t) \) represents the unknown and time-varying external disturbance.
According to [38], D(v(t)) is defined as
where \(v(t) \in R\) denotes the input to the dead-zone, and D(.) denotes the output to the dead-zone.
Assumption 1
[38]: The dead-zone slopes \(m_r=m_l=m\).
Assumption 2
[38]: The parameters m, \(b_r\) and \(b_l\) in (2) are bounded, i.e., \(m_{min}< m < m_{max}\) , \(b_{r_{\min }}<b_{r} < b_{r_{\max }}\) and \(b_{l_{\min }}<b_{l} < b_{l_{\max }}\) with \(m_{min}\), \( m_{max}\), \(b_{r_{\min }}\), \(b_{r_{\max }}\), \(b_{l_{\min }}\) and \(b_{l_{\max }}\) being known constants.
Assumption 3
[38]: The signs for m, \(b_r\) and \(b_l\) are known, i.e., \(m>0\), \(b_r > 0\), \(b_l< 0\).
Then, we redefine (2) as
where
Based on Assumptions 1 and 2, the term d(v(t)) is bounded, i.e., \(|d(v(t))| \le d^*\), with \(d^*=max\{ mb_{r},-mb_{l} \}\).
Remark 1
In practice, many systems can be described or transform as the system (1), such as liquid level control system [53], power systems [54], maglev suspension systems [55, 56], and so on.
Remark 2
Compared with the works in [28,29,30,31,32,33] which only considered external disturbance, the effect of input dead-zone and input delay was unconsidered. Compared with the works in [49,50,51,52,53] which only focus on strict-feedback nonlinear systems with input delay, however, the effect of input dead-zone and the disturbance rejection ability of the closed-loop system are ignored. In addition, the developed method in [49,50,51,52,53] cannot work in long input delay.
The main idea of this research is to establish a unified framework of disturbance-observer-based adaptive neural dynamic surface control scheme for strict-feedback nonlinear systems with time-varying external disturbance, input dead-zone and input delay. Furthermore, the proposed controller can show effective tracking performance for the reference signal \(y_d (t)\) and the closed-loop system shows better disturbance rejection performance.
Assumption 4
For 1 \(\le i \le n\), the unknown time-varying external disturbances \(d_i(t) \) and its derivative \( {\dot{d}}_i(t)\) satisfy \( |d_i(t) | \le \bar{d}_{iU} \) and \( |{\dot{d}}_i(t) | \le \bar{d}_{iD}\), where \( \bar{d}_{iU} \) and \( \bar{d}_{iD}\) are unknown positive constants.
Assumption 5
[57]: The reference trajectory \(y_d (t)\) and its time derivatives \(\ddot{y}_d(t)\) are bounded, i.e., \({\varTheta _0 : = \{ (y_d ,\dot{y}_d ,\ddot{y}_d ):(y_d )^2 + (\dot{y}_d )^2 + (\ddot{y}_d )^2 \le B_0 \} }\), where \(B_0\) is a positive constant.
2.2 Neural networks
In the process of controller design, the NNS are used to approximate the unknown nonlinear function \(f\left( Z \right) :R^n \rightarrow R \). Assume that l represents the number of nodes in NNS, then \(f\left( Z \right) \) can be modeled by
For Eq. (5), Z represents the input vector and \(Z \in \varOmega _z \subset R^q \). \(W \in R^l \) represents the weight vector and \(W = \left[ {w_1 ,w_2 , . . . ,w_l } \right] ^T \). \( \varPhi (Z) = \left[ {s_1 (Z),s_2 (Z), . . . ,s_l (Z)} \right] ^T \in R^l \) is the basis function vector with \( s_i (Z) \) \(( i=1,2, \cdots , l)\) being the Gaussian-like function, i.e.,
where \( \eta \) represents the width of the Gaussian function, and \( v_i = \left[ {v_{i1} ,v_{i2} , . . . ,v_{iq} } \right] ^T \) denotes the center of the receptive domain.
For \(f\left( Z \right) \) defined on a compact set \(\varOmega _Z\), according to literature [7], there exists a suitable \( W^{*T} \varPhi (Z) \) which satisfies
with
being the ideal weight vector and \(|\delta (Z)| < \varepsilon \) \((\varepsilon > 0)\) being the approximation error.
3 Control design
In this section, we first introduce a novel compensation mechanism. Then, based on the compensation mechanism, we will focus on the system (1) to design the disturbance-observer-based adaptive tracking controller by using the idea of backstepping technique and the DSC technique.
3.1 Compensation design
Firstly, we present the following auxiliary system to compensate the effect caused by input delay and dead-zone
where \( h_1 - \frac{{|1 - g_1 |}}{2} > 0 \) , \( h_i - \frac{{|1 - g_i | + |1 - g_{i - 1} |}}{2} > 0 \) , \( i = 2,3,\; \cdots ,n - 1 \) and \( h_n - \frac{{|1 - g_{n - 1} |}}{2} -1> 0 \).
Remark 3
It should be noted that, if input delay \(\tau =0\), then \(\mu _i ( i = 1,2,\; \cdots ,n) \) in (9) are zero when \(\mu _i(0)=0\) .
Next, the following change of coordinate is employed in the process of backstepping designing
where \(\omega _i\) is the first-order filter output signal, which is defined as
with \(\xi _i\) being design parameter and \(\alpha _i\) being the first-order filter input signals. The filter errors are given by
Remark 4
In (10), the change of coordinate is a compensation mechanism, when the system has input delay the auxiliary signal \( \mu _i\) will be utilized to compensate the effect caused by time delay at the last step.
3.2 Controller design
According to the previous compensation design, the specific design steps of the controller are described as follows.
Step 1: Based on (1) and (9), the time derivative of \(z_1\) can be obtained that
Let \(x_2\) be a desired virtual input, then we design the desired feedback signal \(\alpha _{_1 }^*\) as
Based on the idea of approximation by NNS, for given \(\varepsilon _1 >0\), a suitable neural network \( W_1 ^{*T} \varPhi _1 (Z_1 )\) can be selected to approximate the function \(f_1 ({\bar{x}})\), which satisfies that
where \(Z_1 = [x_1]^T\) and \(\delta _1 (Z_1 )\) denote the input vector and the approximation error, respectively.
Then (14) can be rewritten as
where \(D_1 = \delta _1 (Z_1 ) + d_1 \le \varepsilon _1+ d_{1U} =\bar{ D}_1\). In addition, based on Assumption 4 and the idea of NNS approximation, \(\dot{D}_1\) is bounded, i.e., \(|\dot{D}_1 |\le \bar{\bar{D}}_1\) .
Owing to \(W_1 ^{*}\) and \(D_1\) are unknown, thus \({\hat{W}}_1\) and \({\hat{D}}_1\) are used to estimate \(W_1 ^{*}\) and \(D_1\), respectively. Then we design the virtual control law and the adaptive law as
where \(\Lambda _1=\Lambda ^{T} _1 > 0\) and \(\sigma _1 > 0\) are the design parameters.
To deal with the problem of “explosion of complexity” caused by repeatedly differentiating \(\alpha _{1}\), let \(\alpha _{1}\) pass through a given low-pass filter \(\omega _2\), which defined in (11) with the filter time design parameter \(\xi _2\) and the filter error \(e_2\) defined in (12). Then one can get
and
where \(M_2 (\cdot )\) is a continuous function, and \(M_2 (z_1 ,z_2 ,e_2 ,{\hat{W}}_1 ,y_d ,\dot{y}_d ,\ddot{y}_d ,{\hat{D}}_1 ,\mu _1 )=- (\frac{{\partial \alpha _1 }}{{\partial x_1 }}\dot{x}_1 \) \( + \frac{{\partial \alpha _1 }}{{\partial z_1 }}\dot{z}_1 + \frac{{\partial \alpha _1 }}{\partial {{\hat{W}} }}_1\dot{\hat{ W}}_1 + \frac{{\partial \alpha _1 }}{\partial {y_d }}\dot{y}_d + \frac{{\partial \alpha _1 }}{\partial {{\hat{D}}_1 }}\dot{\hat{ D}} _1 + \frac{{\partial \alpha _1 }}{\partial {\mu _1 }}{\dot{\mu }} _1)\). Furthermore, for any given \(B_0\) and \(\vartheta \), the sets \( \varTheta _0 : = \{ (y_d ,\dot{y}_d ,\ddot{y}_d ):(y_d )^2 + (\dot{y}_d )^2 + (\ddot{y}_d )^2 \le B_0 \} \) is compact in \(R^3\), and \(\varTheta _2 : = \{ \sum \nolimits _{j = 1}^2 {z_j^2 + {{\tilde{W}}}_1^T \Lambda ^{-1} {{\tilde{W}}}_1 + e_2^2 } \le 2 \vartheta \}\) is compact in \(R^{N_1+3}\) with \(N_1\) being the dimension of \({{\tilde{W}}}_1^T\). According [57], \(M_{2}\) has a maximum value \(B_{2}\).
Based on (10), (12) and (17), we can have
where \( {{\tilde{W}}}_1 =W_1 ^{*}-\hat{ W_1}\) and \( {{\tilde{D}}}_1 =D_1-\hat{ D}_1\) represent the estimation errors for \(W_1 ^{*}\) and \(D_1\), respectively.
Furthermore, in order to estimate \(D_1\), an auxiliary variable \(\gamma _1\) is introduced to design a DO, i.e.,
with \(o_1 \) being an intermedial variable defined as
where \(p_1>0\) is a designed parameter.
According (21), (22) and (23), differentiating \(\gamma _1\), then
Defining the DO as
with \(l_1>0\) being a design parameter, \(\varphi _1\) being an intermedial variable defined as
Based on (24) and (26), differentiating \({\hat{D}}_1\), then
Furthermore, one can get
From (24), (28) and (20), according to Young’s inequality and Assumption 4, one can get the following inequalities (29), (30) and (31) .
where \(|\varPhi _1 (Z_1 )| \le \phi _1 \), \(r_1>0\) is a design parameter.
Now, the Lyapunov function is taken as
It should be noted that the factor \(\frac{1}{2}\) is employed in the Lyapunov function \(V_1\), which is often employed in the backstepping design process. The main reason is that the Lyapunov function takes the form of square, thus the employed factor \(\frac{1}{2}\) is convenient for us to carry out the theoretical derivation in the process of backstepping design and stability analysis. In other words, the factor \(\frac{1}{2}\) can be chosen the other positive constant, which might cause inconvenience to the design process.
Differentiating \(V_1\), then
Substituting (29), (30) and (31) into (33), and using the complete squares formula, then
Step i (\(2 \le i \le n - 1 \)): Based on (1) and (9), differentiating \( z_i = x_i - \omega _i - \mu _i\), then
Let \(x_{i+1}\) be a desired virtual input, we define the desired feedback signal \(\alpha _{_i}^*\) as
As the first step, based on the idea of approximation, the nonlinear function \(f_i ({\bar{x}}) \) can be approximated by \( W_i ^{*T} \varPhi _i (Z_i)\), which yields
where \(\delta _i (Z_i )\) and \(Z_i = [x_1 ,x_2 , \cdots ,x_i]^T\) denote the approximation error and input vector, respectively.
Substituting (37) into (36), then \(\alpha _i^*\) can be rewritten as
where \(D_i = \delta _i (Z_i ) + d_i \le {\varepsilon _i}+ d_{iU} =\bar{ D}_i\). Based on Assumption 4 and the idea of NNS approximation, \(\dot{D}_i\) is bounded, i.e., \(|\dot{D}_i |\le \bar{\bar{D}}_i\) .
Because \(W_i ^{*}\) and \(D_i\) are unknown, thus we use \({\hat{W}}_i\) and \({\hat{D}}_i\) to estimate \(W_i ^{*}\) and \(D_i\), respectively. Then, we design the virtual control law and the adaptive law as
with \(\Lambda _i=\Lambda ^{T} _i > 0\) and \(\sigma _i > 0\) being the design parameters.
To deal with the “explosion of complexity” problem caused by repeatedly differentiating \(\alpha _{i}\), let \(\alpha _{i}\) pass through the low-pass filter \(\omega _{i+1}\) defined in (11) with the filter time design parameter \(\xi _{i+1}\) and the filter error \(e_{i+1}\) defined in (12). Thus, one can have
and
where \( M_{i+1}(\cdot )\) is a continuous function, and \( M_{i+1}(\cdot ) =M_{i+1} (z_1, \cdots ,z_{i+1}, e_{2}, \cdots , e_{i+1}, \) \( {\hat{W}}_1, \cdots , {\hat{W}}_i , \) \( y_d , \dot{y}_d , \ddot{y}_d , {\hat{D}}_1, \cdots , {\hat{D}}_{i} , \mu _1, \cdots , \mu _{i} ) \mathrm{= } - (\frac{{\partial \alpha _i }}{\partial {x_i }}\dot{x}_i + \frac{{\partial \alpha _i }}{\partial {z_i }}\dot{z}_i + \frac{{\partial \alpha _i }}{\partial {{\hat{W}}_i }}\dot{\hat{ W_i}} + \frac{{\partial \alpha _i }}{\partial {y_d }}\dot{y}_d + \frac{{\partial \alpha _i }}{\partial {{\hat{D}}_i }}\dot{\hat{ D_i}} + \frac{{\partial \alpha _i }}{\partial {\mu _i }}{\dot{\mu }} _i)\). For any given \(B_0\) and \(\vartheta \), the sets \( \varTheta _0 : = \{ (y_d ,\dot{y}_d ,\ddot{y}_d ):(y_d )^2 + (\dot{y}_d )^2 + (\ddot{y}_d )^2 \le B_0 \}\) is compact in \(R^3\) and \(\varTheta _{i} : = \{ \sum \nolimits _{j = 1}^{i} {z_j^2 + {{\tilde{W}}}_1^T \Lambda ^{-1} {{\tilde{W}}}_1 + e_{i+1}^2 } \le 2 \vartheta \}\) is in \(R^{\sum \nolimits _{j = 1}^{i}N_i+2i-1}\) with \(N_i\) being the dimension of \({{\tilde{W}}}_i^T\). According [57], \(M_{i+1}\) has a maximum value \(B_{i+1}\).
With the aid of \(x_{i+1} = z_{i+1} + \alpha _{i} + e_{i+1} + \mu _{i+1}\) and based on (39), then (35) can be rewritten as
where \( {{\tilde{W}}}_i =W_i ^{*}-\hat{ W_i}\) and \( {{\tilde{D}}}_i =D_i ^{*}-\hat{ D_i}\) represent the estimation errors for \(W_i^{*}\) and \(D_i\), respectively.
In what follows, to estimate \(D_i\), an auxiliary variable \(\gamma _i\) is introduced to design a DO, i.e.,
with \(o_i \) being an intermedial variable defined as
where \(p_i>0\) is a designed parameter.
Based on (43), (44) and (45), differentiating \(\gamma _i\), then
Let the DO be designed as
with \(l_i>0\) being a design parameter, \(\varphi _i\) being an intermedial variable defined as
According (46) and (48), differentiating \({\hat{D}}_i\), then
Furthermore, one can get
Based on (46), (50) and (42), according to Young’s inequality and Assumption 4, one can get the following inequalities (51), (52) and (53).
where \(|\varPhi _i (Z_i )| \le \phi _i \), \(r_i>0\) is a design parameter.
Considering the Lyapunov function candidate be
Differentiating \(V_i\)
Now, substituting (51), (52) and (53) into (55), one can get
Step n: According (1) and (9), the time derivative of \(z_n\) as
As in step i, for given \( \varepsilon _n > 0\), \( f_n ({\bar{x}})\) can be modeled by a suitable \( W_n ^{*T} \varPhi _n (Z_n)\), i.e.,
where \(\delta _n (Z_n )\) and \(Z_n = [x_1 ,x_2 , \cdots ,x_n]^T\) denote the approximation error and input vector, respectively.
Substituting (58) into (57), then (57) can be rewritten as
Now, design the desired feedback control \(v^*\) as
where \(D_n = \delta _n (Z_n ) + d_n +d(v(t))\). By using Assumption 4, the idea of NNS approximation, and taking \(|d(v(t))| \le d^*\) into account, one can get \(D_n \le {\varepsilon _n}+ d_{nU}+ d^* =\bar{ D}_n\) and \(|\dot{D}_n |\) is bounded, i.e., \(|\dot{D}_n |\le \bar{\bar{D}}_n\) .
Since \(W_n ^{*}\) and \(D_n\) are unknown, we use \({\hat{W}}_n\) and \({\hat{D}}_n\) to estimate \(W_n ^{*}\) and \(D_n\), respectively. Then, the desired feedback control is designed as
and the adaptive law is designed as
where \(\Lambda _n=\Lambda ^{T}_n > 0\) and \(\sigma _n > 0\) the design parameters.
Substituting (61) into (59), one can get
where \( {{\tilde{W}}}_n =W_n ^{*}-\hat{ W}_n\) and \( {{\tilde{D}}}_n =D_n ^{*}-\hat{ D}_n\) represent the estimation errors for \(W_n ^{*}\) and \(D_n\), respectively.
Next, to estimate \(D_n\), an auxiliary variable \(\gamma _n\) is proposed to design a DO, i.e.,
with \(o_n\) being an intermedial variable defined as
where \(p_n>0\) is a designed parameter.
Based on (63), (64) and (65), differentiating \(\gamma _n\), then
Let the DO be designed as
with \(l_n>0\) being a design parameter, \(\varphi _n\) being an intermedial variable defined as
Based on (66) and (68), differentiating \({\hat{D}}_n\), then
Furthermore, one can get
Similar to Step i, according to (66) and (69) and according to Young’s inequality and Assumption 4, one can get the following inequalities (71) and (72).
where \(|\varPhi _n (Z_n )| \le \phi _n \), \(r_n>0\) is a design parameter.
Then, the Lyapunov function is taken as
Differentiating \(V_n\)
Consequently, substituting (63), (71) and (72) into (74), we can have the following result
3.3 Main result
Based on the above detailed design procedures, now the main result can be described by the following theorem.
Theorem 1
Based on Assumptions 1–5, for system (1) the disturbance observer is designed in (25), (47), (67), the virtual signals defined in (17), (39) for \( 1 \le i \le n - 1 \) , the real controller defined in (61), and the adaptive law defined in (40) for \( 1 \le i \le n \), which can ensure that all the signals of the closed-loop system are bounded, and the tracking error converges to a bounded compact set near the origin.
Proof
Firstly, we design the following Lyapunov function candidate to discuss the stability of the closed-loop system.
Based on the fact \( {{\tilde{W}}}_{i}^T {\hat{W}}_i \le \frac{{1 }}{2}||W _i^*||^2 - \frac{1}{2}{||{{\tilde{W}}} _i||^2 }\) for \(i=1,\cdots ,n\), and differentiating \(V_n \), then
where \(c = \min \{ 2(k_{\mathrm{{i}}}-1) :1 \le i \le {\mathrm{n}} ,\frac{{\sigma _i }}{{\lambda _{\max } (\Lambda _i^{ - 1} )}} :1 \le i \le {\mathrm{n}} , 2(p_i - r_i \phi _i^2 - \frac{{\mathrm{1}}}{{\mathrm{2}}}) :1 \le i \le {\mathrm{n}}, 2( - 1 - r_i \phi _i^2 + l_i ) :1 \le i \le {\mathrm{n}} , (\frac{1}{{\xi _{i+1} }} - 1) :1 \le i \le {\mathrm{n}-1}\} \), and
Multiplying (77) by \(e^{ct}\) on both sides, and integrating from 0 to t, one can get
For (78), if \(t \rightarrow \infty \), then \(e^{-ct} \rightarrow 0\) and V is convergent. This means that all the signals \(z_i\), \({\tilde{W}}_i\), \(\gamma _i\), \({{\tilde{D}}}_i\) and \(e_{i+1}\) are all bounded.
In what follows, we consider the boundedness of \( \mu _i \). Let the Lyapunov function defined as
Thus, the derivative of \(V_{\mu _0 }\) satisfies that
Based on Assumption 3, we have
According to the Cauchy–Schwarz inequality, then
Furthermore, substituting (81) and (82) into (80), one has
where \( {\bar{h}}_1 = h_1 - \frac{{|1 - g_1 |}}{2}\) , \({\bar{h}}_i = h_i - \frac{{|1 - g_i | + |1 - g_{i - 1} |}}{2} \) , \(i = 2,3,\; \cdots ,n - 1 \), and \({\bar{h}}_n = h_n - \frac{{|1 - g_{n - 1} | }}{2}-1 \).
In what follows, we consider the boundedness of \(\frac{\tau }{\beta }||\dot{v}(t)||^2\) in (83).
According to (10), (17), (18), (39),(40),(61) and (62), we describe v(t) and \( \dot{v}(t)\) as
where \(\zeta _1 (.), \zeta _2 (.), \cdots , \zeta _7 (.)\) and \(\zeta _{8j} (.)(1 \le j \le n)\) are \(C^1\) functions. Due to the fact that \(z_{n-2}\), \(z_{n-1}\), \(z_{n}\), \({\hat{W}}_{n-1}\), \({\hat{W}}_n\), \({\hat{D}}_n\) , \({{\tilde{D}}}_n\), \(e_n\) and \(M_n(.)\) are all bounded, therefore, one can obtain that
where \(\kappa _i\) and \( \kappa _{jk} ,(j = 8; 1 \le k \le n)\) are the positive constants.
where \( \kappa '_1 = 4\kappa _1^2 \), \( \kappa '_2 = 4\kappa _2^2 \), \( \kappa '_3 = 4\kappa _3^2\), and \(\kappa '_4= 4\kappa _4^2 \). Furthermore, for \(v(t - \tau )\) it satisfies that
From (85) and (88), the upper boundedness of \(\frac{\tau }{\beta }||\dot{v}(t)||^2\) can be estimated by
where \(\kappa '_5 = 4\kappa _5^2 + 4\kappa ^2_7( \kappa '_1+\kappa '_4)+\kappa ^2_6\) , \(\kappa '_{8j} =4n\kappa _{8j}^2 \), \(\kappa '_6 = 4\kappa _7^2 \kappa '_2\) and \(\kappa '_7 = 4\kappa _7^2 \kappa '_3 \).
According to (89) and rewriting (83) as
where \({{\tilde{h}}}_i = {\bar{h}}_i - \frac{\tau }{\beta }\kappa '_{8i}\) ,\( 1 \le i \le n\).
For the auxiliary system (9), let the Lyapunov function candidate be
Differentiating \(V_\mu \), then
where \({\hat{h}}_i = {{\tilde{h}}}_i \) \((1 \le i \le n - 2)\), \( {\hat{h}}_{n-1} = {{\tilde{h}}}_{n-1} + \frac{\tau }{\beta }\kappa '_7 - \frac{\tau }{v_2} \), and \( {\hat{h}}_n = {{\tilde{h}}}_n + \frac{\tau }{\beta }\kappa '_6 - \frac{\tau }{v_1} \).
By designing the parameters \(h_i, \beta \) , \(v_1\) and \(v_2\), we can have
Furthermore, one can get
Consequently, the derivative of \( V_\mu \) satisfies that
where \( \varrho = \min \{ 2{\hat{h}}_i ,\frac{1}{\tau } - \frac{m \beta }{{2}},\frac{1}{\tau } - \frac{{v_1\kappa '_6 }}{\beta } , 1 ,\frac{1}{\tau } - \frac{{v_2\kappa '_7 }}{\beta }, i = 1,2, \cdots ,n\}\) and \(\kappa = \frac{\tau }{\beta }\kappa '_4 + d^{*2}+ \frac{\tau }{\beta } \kappa '_5\).
By integrating (96) on both sides over [0, t], one can obtain that
From (98), we can conclude that \( \mu _i\) is bounded, i.e.,
According to (78), the signals \(z_i\), \({\tilde{W}}_i\), \(\gamma _i\), \({{\tilde{D}}}_i\) and \(e_{i+1}\) for \(1 \le i \le n\) are all bounded. Furthermore, from (17), (39), (61) and (98) one can get \(\alpha _i\) and v are also bounded. Thus, \(\omega _i \) is bounded which can be derived from the fact that \(e_{i+1}\) and \(\alpha _i\). Consequently, based on the boundedness of \(z_i\), \(\mu _i\), \(\omega _i \), \(\alpha _i\) and v, one can get \(x_i\) is also bounded. In particular, one can get \(|y - y_d| \le |z_1|+|\mu _1|\) which means that the tracking error is bounded. From above discussions, we can get that for \(1 \le i \le n\), all the signals of the closed-loop system are all bounded. The proof is completed.
Remark 5
From above discussions, the tracking error can be minimized by adjusting the design parameters \(k_i\), \(h_i\), \(g_i\), \(\sigma _i\), \(p_i\), \(l_i\) and \(\xi _i\), such that a good robust performance of the closed-loop systems can be obtained. In particular, if we increase the parameters \(k_i\), \(h_i\), \(g_i\), \(p_i\) and \(l_i\), the tracking errors will be decreased. On the other hand, if we decrease the parameters of \(\xi _i\), \(\sigma _i\), then the tracking errors will also be decreased.
Remark 6
Based on the auxiliary system, the disturbance observer is introduced to estimate the approximation error and unknown time-varying external disturbance. There is no need to know the boundary of the approximation error or time-varying external disturbance.
Remark 7
The output information of the disturbance observer is employed to construct the virtual control signal and the real control signal. Then the control signal can be adaptive adjusted according to the output of the disturbance observer. Compared with the existing results in [28,29,30,31,32,33, 49,50,51,52,53], the proposed adaptive neural dynamic surface control scheme in this paper which not only estimates the unknown time-varying external disturbance and the approximation error caused by the NNS, but also eliminates the effect caused by input delay and dead-zone. Consequently, the disturbance rejection performance of the closed-loop system can be effectively improved.
Remark 8
In practical applications, the proposed auxiliary system can be constructed easily according to the number of system state variables. The compensation signal \(\mu _i {\mathrm{(i = 1,2,}} \cdots {\mathrm{,n)}}\) in the auxiliary system can be used in the virtual signals and real control signal. The stability of the closed-loop system can also be guaranteed by choosing the appropriate Lyapunov function and the setting parameters.
4 Simulation
In this section, two examples of strict-feedback nonlinear systems are given to show the effectiveness and characteristics of the proposed method. Example 1 is a third-order numerical example with constant input delay and dead-zone used for a comparison with the proposed method in [53]. Example 2 is an application example of third-order one-link robot system with time-varying input delay and dead-zone used to show the superiority of the proposed approach.
Example 1
A third-order nonlinear system with time-varying external disturbance, input dead-zone and input delay described as the following form:
where \(d_1(t)=0.5cos(t)\), \(d_2(t)=sin(0.5t)\) and \(d_3(t)=sin(0.2t)+0.5cos(0.1t)\) are time-varying external disturbance. The initial conditions \(x (0)=[0.5, 0,0]^T\).
The control object is to make the output to track the reference signal \(y_d=0.5sin(t)+0.5cos(0.5t)\) with the input delay being \(\tau =1s\), and the dead-zone parameters being \(m=1\), \(b_r=2\), \(b_l=-2\).
Firstly, in order to verify the effectiveness of the proposed method in this paper, a comparison with the proposed method in [53] is carried out to test the tracking performance for the reference signal.
The simulation parameters in [53] (please see [53]) which are selected as \(k_1=20\), \(k_2=30\), \(k_3=40\), \(\Lambda _1=0.01I\), \(\Lambda _2=0.02I\), \(\Lambda _3=0.01I\), \(\sigma _1=5\), \(\sigma _2=8\), \(\sigma _3=15\), \(c_1=8\), \(c_2=10\), \(c_3=15\), \(l_1=20\), \(l_2=20\), \(l_3=50\), \(\beta _1=0.015\), \(\beta _2=0.01\). The simulation result is shown in Fig. 1.

The trajectories of \(x_1\) and \(y_d\) with input delay \(\tau =1s\) using the method [53] in example 1
From Fig. 1, one can observe that the system trajectory \(x_1\) can not track the reference signal \(y_d\), and the system trajectory \(x_1\) is unstable when the input delay \(\tau =1s\), input dead-zone, and external disturbances appear. The simulation result shows that the control signal is completely invalid when the input delay occurs. This means that, the Pade approximation method is invalid for long input delay.
In what follows, we test the effectiveness of the proposed method in this article. In the simulation, some parameters are selected as above, let the parameters be \({\hat{W}} _1(0)\)= \({\hat{W}}_2(0)\)= \({\hat{W}}_3(0)=0.1\), \(\gamma _1(0)=\gamma _2(0)=\gamma _3(0)=0\), \(\mu _1(0)\)=\(\mu _2(0)\)=\(\mu _3(0)=0\), \(\omega _1(0)=\omega _2(0)=0\), \(o_1(0)=o_2(0)=o_3(0)=0\), \(k_1=20\), \(k_2=30\), \(k_3=40\), \(h_1=2\), \(h_2 =4\), \(h_3=3\), \(g_1=1\), \(g_2=1\), \(\Lambda _1=0.01I\), \(\Lambda _2=0.02I\), \(\Lambda _3=0.01I\), \(\sigma _1=5\), \(\sigma _2=8\), \(\sigma _3=15\), \(p_1=8\), \(p_2=10\), \(p_3=15\), \(l_1=20\), \(l_2=20\), \(l_3=50\), \(\xi _1=0.015\), \(\xi _2=0.01\). The Gaussian NNS are employed in the simulation, and the center of the receptive field is \(v=[-5,-4,-3,-2,-1,0,1,2,3,4,5]^T\) with the width \(\eta =1\). The simulation time is 30s, and the simulation results are shown in Figs. 2, 3, 4, 5, 6, 7, 8, 9, 10.
Figure 2 draws the trajectories of the state \(x_1\) and \(y_d\).

The trajectories of \(x_1\) and \(y_d\) with input delay \(\tau =1s\) in example 1
From Fig. 2, one can observe that under the input delay \(\tau =1s\), input dead-zone and external disturbances, the system state trajectory of \(x_1\) can track \(y_d\) quickly.
Figure 3 draws the state trajectories of \(x _2\) and \(x _3\), respectively. From Fig.3 one can observe that the state trajectories of \(x _2\) and \(x _3\) are all bounded with input delay \(\tau =1s\), input dead-zone, and time-varying external disturbances.

The trajectories of \(x_2\) with input delay \(\tau =1s\) in example 1
Figure 4 depicts the trajectories of \(z_1\), \(z_2\) and \(z_3\) are all bounded with input delay \(\tau =1s\), input dead-zone and time-varying external disturbances. This means that the proposed adaptive controller can ensure that the tracking errors converge to a compact set of the origin.

The trajectories of \(z_1\),\(z_2\) and \(z_3\) in example 1
Figure 5 depicts the state trajectories of auxiliary system \(\mu _1\), \(\mu _2\) and \(\mu _3\)

The auxiliary system’s states \(\mu _1\), \(\mu _2\) and \(\mu _3\) in example 1
From Fig. 5, one can observe that the auxiliary systems \(\mu _1\), \(\mu _2\) and \(\mu _3\) are asymptotically stable. Therefore, the compensation signals are bounded, which verifies the correctness of the theoretical analysis.
Figure 6 displays the adaptive laws \(\hat{W} _1\), \( \hat{W}_2\) and \(\hat{W}_3\) are bounded.

The adaptive laws’ trajectories \(\hat{W} _1\), \( \hat{W}_2\) and \(\hat{W}_3\) in example 1
From the simulation result in Fig.6, although the input delay and input dead zone exist in practical system, one can conclude that the adaptive laws are all bounded. This demonstrates the effectiveness of the proposed compensation mechanism.
Figures 7, 8 and 9 depict the trajectories of \({\hat{D}}_1\), \(D_1\), \({\hat{D}}_2\), \(D_2\), \({\hat{D}}_3\), \(D_3\), respectively.

The adaptive laws’ trajectories \({\hat{D}}_1\), and \(D_1\) in example 1

The adaptive laws’ trajectories \({\hat{D}}_2\), and \(D_2\) in example 1

The adaptive laws’ trajectories \({\hat{D}}_3\), and \(D_3\) in example 1
From Figs. 7, 8, 9, one can observe that the proposed disturbance observer can estimate the approximation error and the external time-varying disturbance accurately and quickly. This means that the proposed disturbance observer can effectively provide the estimation information for the adaptive controller, thus improving the disturbance rejection performance of the closed-loop system.
The control signal \(D(v(t- \tau ))\) with \(\tau =1s\) is shown in Fig. 10. It can be seen from Fig. 10 that the input signal is bounded.

The control signal \(D(v(t - \tau ))\) with \(\tau =1s\) in example 1
From Fig. 10, one can observe that the proposed controller is bounded by using the compensation mechanism, although the input delay and input dead zone exist in practical system.
From the simulation results in Figs. 2, 3, 4, 5, 6, 7, 8, 9, 10 one can obtain that for input delay \(\tau = 1s\) and the time-varying external disturbance \(d_1(t)=0.5cos(t)\), \(d_2(t)=sin(0.5t)\) and \(d_3(t)=sin(0.2t)+0.5cos(0.1t)\), and input dead-zone, all the signals of the closed-loop systems are bounded by using the proposed adaptive neural controller.
From the comparative results of Figs. 1, 2, 3, 4, 5, 6, 7, 8, 9, 10, one can observe that the proposed method in this paper can tackle disturbance-observer-based adaptive control for strict-feedback systems with long input delay and dead-zone. At the same time, the proposed scheme shows excellent tracking performance.
Example 2
Consider a one-link robot system used in [58]. The dynamics model of the system with input dead-zone and time-varying delay is described as follows:
where q represents the link position, \(\dot{q}\) represents the angular velocity, and \(\ddot{q}\) represents the angular acceleration. I denotes the motor shaft angle and \(\dot{I}\) denotes the velocity. v is the motor torque, and \(D(v(t - \tau ))\) represents the input dead-zone and delay for control input v.
Let \(x_1=q\), \(x_2=\dot{q}\) and \(x_3=I/D\), we add the external disturbances \(d_1(t)=0.3sin(t)\), \(d_2(t)=0.2sin(2t)\) and \(d_3(t)=0.3cos(t)\) and rewrite the system as
where \(D=1\), \(B=1\), \(M=1\), \(K_m=10\), \(J=0.5\), \(N=10\) and \(x (0)=[0, 0,0]^T\).
The control object is to make the output to track the reference signal \(y_d=0.5sin(t)\) with the time-varying input delay being \(\tau =0.8+0.5sin(t)s\), and the dead-zone parameters being \(m=2.5\), \(b_r=2\), \(b_l=-2\).
Let the initial conditions \({\hat{W}} _1(0)\)= \({\hat{W}}_2(0)\)= \({\hat{W}}_3(0)=0.01\), \(\gamma _1(0)=\gamma _2(0)=\gamma _3(0)=0\), \(\mu _1(0)\)=\(\mu _2(0)\)=\(\mu _3(0)=0\), \(\omega _1(0)=\omega _2(0)=0\), \(o_1(0)=o_2(0)=o_3(0)=0\), \(k_1=20\), \(k_2=10\), \(k_3=10\), \(h_1=8\), \(h_2 =8\), \(h_3=5\), \(g_1=2\), \(g_2=2\), \(\Lambda _1=0.0001I\), \(\Lambda _2=0.0001I\), \(\Lambda _3=0.0001I\), \(\sigma _1=1\), \(\sigma _2=1\), \(\sigma _3=1\), \(p_1=9\), \(p_2=9\), \(p_3=9\), \(l_1=18\), \(l_2=18\), \(l_3=18\), \(\xi _1=0.015\), \(\xi _2=0.01\). The Gaussian NNS are employed in the simulation, and the center of the receptive field is \(v=[-5, -4, -3, -2, -1, 0, 1,\) \( 2, 3, 4, 5]^T\) with the width \(\eta =1\). The simulation time is 30s, and the simulation results are shown in Figs. 11, 12, 13, 14, 15, 16, 17, 18, 19. The trajectories of the state \(x_1\) and \(y_d\) are depicted in Fig. 11.

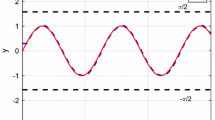
The trajectories of \(x_1\) and \(y_d\) with time-varying input delay \(\tau =0.8+0.5sin(t)s\) in example 2
From Fig. 11, one can observe that under the input delay \(\tau =0.8+0.5sin(t)s\), input dead-zone and external disturbances, the system state trajectory of \(x_1\) can track the reference signal \(y_d\).
Figure 12 draws the state trajectories of \(x _2\) and \(x _3\).

The state trajectory of \(x _2\) and \(x _3\) with input delay \(\tau =0.8+0.5sin(t)s\) in example 2
From Fig.12 we can see that the state trajectories of \(x _2\) and \(x_3\) are bounded with input delay \(\tau =0.8+0.5sin(t)s\), input dead-zone and external disturbances.
Figure 13 depicts the trajectories of \(z_1\), \(z_2\) and \(z_3\).

The trajectory of \(z_1\), \(z_2\) and \(z_3\) in example 2
From Fig. 13, we can observe that all the signals of the tracking errors are bounded by using the proposed adaptive controller with input delay \(\tau =0.8+0.5sin(t)s\), input dead-zone and time-varying external disturbances.
Figure 14 shows the state trajectories of auxiliary system \(\mu _1, \mu _2\) and \(\mu _3\) are asymptotically stable.

The auxiliary system’s states \(\mu _1\), \(\mu _2\) and \(\mu _3\) in example 2
Figure 15 displays the adaptive laws \(\hat{W} _1\), \(\hat{W}_2\) and \(\hat{W}_3\) are bounded with time-varying input delay, input dead-zone and time-varying external disturbances.

The adaptive laws’ trajectories \(\hat{W} _1\), \(\hat{W}_2\) and \(\hat{W}_3\) in example 2
Figures 16, 17 and 18 depict the trajectories of \({\hat{D}}_1\), \(D_1\), \({\hat{D}}_2\), \(D_2\), \({\hat{D}}_3\), \(D_3\), respectively.

The adaptive laws’ trajectories \({\hat{D}}_1\), and \(D_1\) in example 1

The adaptive laws’ trajectories \({\hat{D}}_2\), and \(D_2\) in example 1

The adaptive laws’ trajectories \({\hat{D}}_3\), and \(D_3\) in example 1
From Figs. 16, 17, 18, one can observe that the proposed disturbance observer can estimate the approximation error and the external time-varying disturbance accurately and quickly.
The control signal \(D(v(t- \tau ))\) with \(\tau =0.8+0.5sin(t)s\) is shown in Fig.19.

The control signal \(D(v(t - \tau ) )\) with \(\tau =0.8+0.5sin(t)s\) in example 2
From the simulation results in Figs. 11, 12, 13, 14, 15, 16, 17, 18, 19, one can conclude that for the time-varying input delay \(\tau =0.8+0.5sin(t)s\), input dead-zone and the time-varying external disturbance \(d_1(t)=0.3sin(t)\), \(d_2(t)=0.2sin(2t)\) and \(d_3(t)=0.3cos(t)\), all the signals of the closed-loop systems are bounded by using the proposed adaptive neural controller.
In order to illustrate the superiority of the proposed method in this paper, a comparison with [52] and [53] is carried out to test the effectiveness of the method in handling different input delays. The reference signal is selected as above, and the comparison results are shown in Table 1. In Table 1, the mark \(\checkmark \) denotes the output signal can track the reference signal, and the mark \(\times \) denotes the output signal cannot track the reference signal.
From the results in Table 1, one can observe that for the smallest input delay, all proposed method are effectiveness. However, if the input delay \( \tau \ge 0.1s \), the method in [52] is completely invalid, and the output signal of the system cannot track the reference signal. The method in [53] is superior to the method in [52]. However, if the input delay \( \tau \ge 1.5s \), then the closed-loop system become unstable for the method in [53]. For the proposed method in this paper, the system state variables are still controllable when \( \tau \le 2.0s \). From the results in Table 1, one can conclude that the proposed method in this paper is super to the methods in [52, 53].
4.1 Comparative explanations
The proposed method in this paper gives an effective way for strict-feedback nonlinear systems with time-varying external disturbance, input dead-zone and input delay. Compared with the existing results in [13,14,15,16, 28,29,30,31,32,33, 49,50,53], the main advantages of the proposed method can be summarized in the following three aspects.
-
(1)
The proposed compensation mechanism is convenient to overcome the design difficulty on the input-delay systems theoretically. Unlike the Pade approximation method which is invalid once the input delay is long, the proposed method can tackle long input delay.
-
(2)
Different from [28,29,30,31,32,33], the proposed control scheme can not only estimate the unknown time-varying external disturbance and the approximation error caused by the NNS, but also eliminate the effect caused by input delay and dead-zone.
-
(3)
Compared with the existing results in [13,14,15,16] [49,50,51,52,53], the disturbance rejection performance of the closed-loop system can be effectively improved. Especially, when the system has input delay and dead zone, the robust performance of the system can be effectively guaranteed.
5 Conclusions
In this article, based on the idea of DSC scheme and by combing NNS with backstepping technique, we consider disturbance-observer-based adaptive tracking control for strict-feedback nonlinear systems with time-varying external disturbance, input dead-zone and input delay. To degrade the complexity and difficulty of controller design, a novel compensation mechanism is developed to exclude the effect caused by input dead-zone and input delay. Based on the auxiliary system, a disturbance observer is constructed to estimate the approximation error and the unknown external time-varying disturbance in each backstepping step, and the effect of input dead zone and delay can be eliminated. The “explosion of complexity” problem has been avoided by DSC scheme. Finally, the simulation results show that the proposed scheme has better tracking performance. In the future, we will discuss the problem of nonlinear systems control with unknown input delay in depth.
References
Mayne D (2002) Nonlinear and adaptive control design. IEEE Trans Autom Contr 41(12):1849
Chang XH, Xiong J, Li ZM et al (2017) Quantized static output feedback control for discrete-time systems. IEEE Trans Ind Info 14(8):3426–3435
Zou W, Shi P, Xiang Z et al (2020) Finite-time consensus of second-order switched nonlinear multi-agent systems. IEEE Trans Neur Netw Learn Sys 31(5):1757–1762
Qi W, Gao X, Ahn CK et al (2022) Fuzzy integral sliding-mode control for nonlinear semi-Markovian switching systems with application. IEEE Trans Sys, Man Cybern: Sys 52(3):1674–1683
Li S, Ahn CK, Xiang Z (2019) Sampled-data adaptive output feedback fuzzy stabilization for switched nonlinear systems with asynchronous switching. IEEE Trans Fuzzy Sys 27(1):200–205
Tong S, Min X, Li Y (2020) Observer-based adaptive fuzzy tracking control for strict-feedback nonlinear systems with unknown control gain functions. IEEE Trans Cybern 50(9):3903–3913
Wang X, Niu B, Song X et al (2021) Neural networks-based adaptive practical preassigned finite-time fault tolerant control for nonlinear time-varying delay systems with full state constraints. Int J Rob Nonlin Contr 31(5):1497–1513
Liu Y, Zhu Q, Wen G (2022) Adaptive Tracking Control for Perturbed Strict-Feedback Nonlinear Systems Based on Optimized Backstepping Technique. IEEE Trans Neur Netw Learn Sys 33(2):853–865
Wang H, Liu PX, Xie X et al (2021) Adaptive fuzzy asymptotical tracking control of nonlinear systems with unmodeled dynamics and quantized actuator. Info Sci 575:779–792
Li Y, Liu Y, Tong S (2021) Observer-based neuro-adaptive optimized control of strict-feedback nonlinear systems with state constraints. IEEE Trans Neur Netw Learn Sys. https://doi.org/10.1109/TNNLS.2021.3087796
Swaroop D, Gerdes JC, Yip PP et al (1997) Dynamic surface control of nonlinear systems. Am Contr Conf 5:3028–3034
Chen M, Tao G, Jiang B (2014) Dynamic surface control using neural networks for a class of uncertain nonlinear systems with input saturation. IEEE Trans Neur Netw Learn Sys 26(9):2086–2097
Wang H, Xu K, Liu PX et al (2021) Adaptive fuzzy fast finite-time dynamic surface tracking control for nonlinear systems. IEEE Trans Circ Sys I: Regular Pap 68(10):4337–4348
Ma Z, Ma H (2019) Adaptive fuzzy backstepping dynamic surface control of strict-feedback fractional-order uncertain nonlinear systems. IEEE Trans Fuzzy Sys 28(1):122–133
Sun K, Liu L, Qiu J et al (2021) Fuzzy adaptive finite-time fault-tolerant control for strict-feedback nonlinear systems. IEEE Trans Fuzzy Sys 29(4):786–796
Zhao J, Li X, Tong S (2020) Fuzzy adaptive dynamic surface control for strict-feedback nonlinear systems with unknown control gain functions. Int J Sys Sci 1:1–16
Sun K, Qiu J, Karimi HR et al (2021) Event-triggered robust fuzzy adaptive finite-time control of nonlinear systems with prescribed performance. IEEE Trans Fuzzy Sys 29(6):1460–1471
Yan X, Chen M, Feng G et al (2019) Fuzzy robust constrained control for nonlinear systems with input saturation and external disturbances. IEEE Trans Fuzzy Sys 29(2):345–356
Min H, Xu S, Fei S et al (2021) Observer-based NN control for nonlinear systems with full-state constraints and external disturbances. IEEE Trans Neur Netw Learn Sys. https://doi.org/10.1109/TNNLS.2021.3056524
Li K, Tong S (2019) Fuzzy adaptive practical finite-time control for time delays nonlinear systems. Int J Fuzzy Sys 21(4):1013–1025
Liu Y, Liu X, Jing Y et al (2019) Direct adaptive preassigned finite-time control with time-delay and quantized input using neural network. IEEE Trans Neur Netw Learn Sys 31(4):1222–1231
Wang H, Kang S, Zhao X et al (2021) Command filter-based adaptive neural control design for nonstrict-feedback nonlinear systems with multiple actuator constraints. IEEE Trans Cybern. https://doi.org/10.1109/TCYB.2021.3079129
Xu Q, Wang Z, Zhen Z (2019) Adaptive neural network finite time control for quadrotor UAV with unknown input saturation. Nonlin Dyn 98(3):1973–1998
Nakao M, Ohnishi K, Miyachi K (1987) A robust decentralized joint control based on interference estimation. IEEE Int Conf Robot Automat 4:326–331
Xu B, Zhang L, Ji W (2021) Improved non-singular fast terminal sliding mode control with disturbance observer for PMSM drives. IEEE Trans Transport Electrif 7(4):2753–2762
Liu X, Yu H (2021) Continuous adaptive integral-type sliding mode control based on disturbance observer for PMSM drives. Nonli Dyn 104(2):1429–1441
Zhang J, Liu X, Xia Y et al (2016) Disturbance observer-based integral sliding-mode control for systems with mismatched disturbances. IEEE Trans Ind Electr 63(11):7040–7048
Zhang H, Wei X, Zhang L et al (2017) Disturbance rejection for nonlinear systems with mismatched disturbances based on disturbance observer. J Frankl Instit 354(11):4404–4424
Wei XJ, Wu ZJ, Karimi HR (2016) Disturbance observer-based disturbance attenuation control for a class of stochastic systems. Automatica 63:21–25
Wei XJ, Dong L, Zhang H et al (2019) Adaptive disturbance observer-based control for stochastic systems with multiple heterogeneous disturbances. Int J Robust Nonlin Contr 29(16):5533–5549
Zhao Z, Ren Y, Mu C et al (2021) Adaptive neural-network-based fault-tolerant control for a flexible string with composite disturbance observer and input constraints. IEEE Trans Cybern. https://doi.org/10.1109/TCYB.2021.3090417
Qiu J, Wang T, Sun K et al (2022) Disturbance observer-based adaptive fuzzy control for strict-feedback nonlinear systems with finite-time prescribed performance. IEEE Trans Fuzzy Sys 30(4):1175–1184
Chen M, Tao G, Jiang B (2015) Dynamic surface control using neural networks for a class of uncertain nonlinear systems with input saturation. IEEE Trans Neur Netw Learn Sys 26:2086–2097
Buscarino A, Fortuna CFL, Frasca M (2016) Passive and active vibrations allow self-organization in large-scale electromechanical systems. Int J Bifurcat Chaos 26(07):1650123
Bucolo M, Buscarino A, Famoso C et al (2019) Control of imperfect dynamical systems. Nonlin Dyn 98(4):2989–2999
Bucolo M, Buscarino A, Famoso C et al (2021) Imperfections in integrated devices allow the emergence of unexpected strange attractors in electronic circuits. IEEE Access 9:29573–29583
Tao G, Kokotovic PV (1994) Adaptive control of plants with unknown dead-zones. IEEE Trans Autom Contr 39(1):59–68
Wang XS, Su CY, Hong H (2004) Robust adaptive control of a class of nonlinear systems with unknown dead-zone. Automatica 40(3):407–413
Zhou Q, Zhao S, Li H et al (2019) Adaptive Neural Network Tracking Control for Robotic Manipulators With dead-zone. IEEE Trans Neur Netw Learn Sys 30(12):3611–3620
Wang S, Yu H, Yu J et al (2020) Neural-network-based adaptive funnel control for servo mechanisms with unknown dead-zone. IEEE Trans Cybern 50(4):1383–1394
Yu J, Shi P, Dong W, Lin C (2018) Adaptive fuzzy control of nonlinear systems with unknown dead zones based on command filtering. IEEE Trans Fuzzy Sys 26(1):46–55
Espitia N, Perruquetti W (2021) Predictor-feedback prescribed-time stabilization of LTI systems with input delay. IEEE Trans Autom Contr 67(6):2784–2799
Zhou Y, Wang X, Xu R (2022) Command-filter-based adaptive neural tracking control for a class of nonlinear MIMO state-constrained systems with input delay and saturation. Neur Netw 147:152–162
Zhang J, Li S, Ahn CK et al (2022) Decentralized event-triggered adaptive fuzzy control for nonlinear switched large-scale systems with input delay via command-filtered backstepping. IEEE Trans Fuzzy Sys 30(6):2118–2123
Li H, Liu Q, Feng G et al (2021) Leader-follower consensus of nonlinear time-delay multiagent systems: A time-varying gain approach. Automatica 126:109444
Li X, Li P (2021) Stability of time-delay systems with impulsive control involving stabilizing delays. Automatica 124:109336
Liu G, Hua C, Liu PX et al (2021) Input-to-state stability for time-delay systems with large delays. IEEE Trans Cybern. https://doi.org/10.1109/TCYB.2021.3106793
Sun J, Yang J, Zeng Z (2022) Predictor-based periodic event-triggered control for nonlinear uncertain systems with input delay. Automatica 136:110055
Li H, Wang L, Du H et al (2017) Adaptive fuzzy backstepping tracking control for strict-feedback systems with input delay. IEEE Trans Fuzzy Sys 25(3):642–652
Li D, Liu Y, Tong S et al (2019) Neural networks-based adaptive control for nonlinear state constrained systems with input delay. IEEE Trans Cybern 49(4):1249–1258
Ma J, Xu S, Cui G et al (2019) Adaptive backstepping control for strict-feedback non-linear systems with input delay and disturbances. IET Contr Theory Appl 13(4):506–516
Ma J, Xu S, Li Y et al (2018) Neural networks-based adaptive output feedback control for a class of uncertain nonlinear systems with input delay and disturbances. J Frankl Instit 355(13):5503–5519
Zhang Q, Dong J (2020) Disturbance-observer-based adaptive fuzzy control for nonlinear state constrained systems with input saturation and input delay. Fuzzy Sets Sys 392:77–92
Sun H, Li S, Yang J et al (2015) Global output regulation for strict-feedback nonlinear systems with mismatched nonvanishing disturbances. Int J Robust Nonlin Contr 25(15):2631–2645
Sun Y, Xu J, Lin G et al (2021) Adaptive neural network control for maglev vehicle systems with time-varying mass and external disturbance. Neur Comput Appl. https://doi.org/10.1007/s00521-021-05874-2
Sun Y, Xu J, Chen C et al (2022) Reinforcement learning-based optimal tracking control for levitation system of maglev vehicle with input time delay. IEEE Trans Instrument Measur 71:1–13
Wang D, Huang J (2005) Neural network-based adaptive dynamic surface control for a class of uncertain nonlinear systems in strict-feedback form. IEEE Trans Neural Netw 16(1):195–202
Wang M, Wang C, Shi P et al (2016) Dynamic learning from neural control for strict-feedback systems with guaranteed predefined performance. IEEE Trans Neur Netw Learn Sys 27(12):2564–2576
Acknowledgements
This research was financially supported by the National Natural Science Foundation of China (Grants Nos. 11871117 and 61873041).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that there is no conflict of interests regarding the publication of this paper.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
Springer Nature or its licensor holds exclusive rights to this article under a publishing agreement with the author(s) or other rightsholder(s); author self-archiving of the accepted manuscript version of this article is solely governed by the terms of such publishing agreement and applicable law.
About this article

Cite this article
Zhai, J., Wang, H. & Tao, J. Disturbance-observer-based adaptive dynamic surface control for nonlinear systems with input dead-zone and delay using neural networks. Neural Comput & Applic 35, 4027–4049 (2023). https://doi.org/10.1007/s00521-022-07865-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-022-07865-3