
Abstract
Recently, numerous meta-heuristic-based approaches are deliberated to reduce the computational complexities of several existing approaches that include tricky derivations, very large memory space requirement, initial value sensitivity, etc. However, several optimization algorithms namely firefly algorithm, sine–cosine algorithm, and particle swarm optimization algorithm have few drawbacks such as computational complexity and convergence speed. So to overcome such shortcomings, this paper aims in developing a novel chaotic sine–cosine firefly (CSCF) algorithm with numerous variants to solve optimization problems. Here, the chaotic form of two algorithms namely the sine–cosine algorithm and the firefly algorithms is integrated to improve the convergence speed and efficiency thus minimizing several complexity issues. Moreover, the proposed CSCF approach is operated under various chaotic phases and the optimal chaotic variants containing the best chaotic mapping are selected. Then numerous chaotic benchmark functions are utilized to examine the system performance of the CSCF algorithm. Finally, the simulation results for the problems based on engineering design are demonstrated to prove the efficiency, robustness and effectiveness of the proposed algorithm.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
In recent decades, numerous algorithms have been proposed to overcome various optimization problems in the field of engineering [1]. These optimization problems determine the value of a few parameters under specific circumstances for optimizing the objective function. In general, the objective function is a specific characteristic that provides a minimal or maximal solution based on the problem. Therefore, to attain best optimistic solutions, the optimizations are broadly utilized in various applications such as industrial design, manufacture design, design analysis and engineering design [2]. There occur several optimization problems while obtaining optimal solution, and these optimization problems are categorized into several types namely dynamic or static, continuous or discrete, single-objective or multi-objective as well as constrained or unconstrained. Hence, to enhance the accuracy and the efficiency of such optimization problems, several research scholars depend upon meta-heuristic algorithms for easy implementation, gradient information and to avoid or bypass local optimization problem [3].
At the same time, the meta-heuristic algorithm plays a significant role in engineering field due to its wide range of challenges. But the nature-inspired meta-heuristic algorithms are relatively straight forward and are inspired mostly by unsophisticated ideas. Normally, the meta-heuristic algorithms are divided into four main categories namely swarm-based algorithm, evolutionary-based algorithm; human behaviour-based algorithm as well as physic-based algorithm [4]. Optimization algorithms such as differential evolution (DE) algorithm [5], evolution strategy (ES) algorithm [6], backtracking search optimization algorithm [7, 8], and genetic algorithm (GA) [9] are categorized under evolutionary-based technique [10,11,12]. Few algorithms namely firefly (FF) algorithm [13,14,15], particle swarm optimization (PSO) algorithm [16, 17], artificial bee colony (ABC) algorithm [18] are categorized under swarm intelligence approach; gravitational search (GS) algorithm [19], black hole (BH) algorithm [20] are few algorithms that are characterized under physic-based techniques. The human-based behaviour comprises of Mine Blast (MB) algorithm [21] and League Championship (LC) algorithm [22]. The evolutionary algorithm imitates the behaviour of evolutionary processes thereby producing a global optimal offspring value. Then the candidate solutions are enhanced and the iterative processes are continued until it satisfies the terminating criteria [23, 24].
In the present study, a novel chaotic sine–cosine firefly (CSCF) algorithm is developed with numerous variants to solve optimization problems. Then, the chaotic form of two algorithms namely the sine–cosine algorithm (SCA) and the firefly (FF) algorithms is integrated to improve the convergence speed and efficiency thereby minimizing several complexity issues. In addition to this, the proposed CSCF approach is operated under various chaotic phases and the optimal chaotic variants containing the best chaotic mapping is selected to determine the efficiency of the system.
This research study fulfils four main objectives
-
Demonstrating a novel chaotic sine–cosine firefly (CSCF) algorithm to improve the convergence speed and efficiency thereby minimizing several complexity issues.
-
Developing numerous variants such as Variant-I, Variant-II, Variant-III, Variant-IV and Variant-V of the novel CSCF algorithm for chaotic tuning of numerous parameters.
-
Utilizing numerous chaotic benchmark functions to examine the system performance of the CSCF algorithm.
-
Demonstrating engineering design problems to prove the efficiency, robustness and effectiveness of the CSCF algorithm.
The rest of the paper is structured as follows. Section 2 provides the basics of two different types of algorithms namely firefly (FF) algorithm and sine–cosine algorithm (SCA). Section 3 describes the proposed CSCF algorithm by forming diverse variants to tune the parameters. Then Sect. 4 demonstrates the chaotic and benchmark functions to determine the efficiency of the system; the comparative analysis of various approaches with the proposed CSCF algorithm and finally the engineering design problems are solved. Section 5 concludes the article.
2 Related literal works
2.1 Improved firefly (IFF) algorithm
2.1.1 Standard firefly algorithm
The Firefly algorithm was first developed by Xin-She at the University of Cambridge. The firefly algorithm imitates the characteristics of the firefly as well as its locomotion activities [25]. This firefly algorithm is considered to be a more efficient approach in finding solutions for various crucial engineering related issues because of very high exploration capability, its brightness and flashlight capability. Also, the firefly algorithm works under the principle of bionics [26]. The most effective firefly algorithm is selected to obtain the best optimal value despite the complex and nonlinear design. In general, each individual firefly has the capability to flash its light to attract the adjacent firefly thereby providing arbitrary solutions.
-
A
Purpose for flashing light
-
Attracting the partner for mating since every firefly is unisexual in nature
-
The attracting capability is proportional to the brightness. The firefly also utilizes its flashing light capability to attract the prey for survival.
-
Moreover, the firefly uses its flashing light to protect themselves from other enemies [27].
-
-
B
Light intensity variation and attraction capability
The light intensity variation and the attraction capability play a significant role in the firefly algorithm. The fitness value is determined by the light intensity. It also has the capability to deal with several multi-optimization problems and are highly nonlinear [28]. Here, the firefly with high or low intensity gets attracted with the neighbouring firefly having high or low intensity [29]. Let us consider, \(D_{XY}\) be the distance among two fireflies namely \(X\;{\text{and}}\;Y\). Furthermore, the intensity of the light diminishes concerning the distance from the source; also the media absorbs the light. Then as per the law of square inverse, the expression for the intensity of the light is represented in Eq. (1).
From Eq. (1), the source intensity is represented as \(I_{S}\). Then the expression for the intensity of the light \(I_{L}\) that varies concerning the distance \(D_{XY}\) is mentioned in Eq. (2). Therefore,
From the above equation, \(\beta\) is the absorption coefficient of the fixed light. The initial intensity of the light is denoted as \(I_{0}\).
Each firefly contains a very strong attractive capability. This implies the strong attracting behaviour of a firefly over neighbouring firefly groups. Based on the distance between the two fireflies namely \(X\,\,{\text{and}}\,\,Y\), the attractive capability is varied. We know that the attractive capability of the firefly is directly proportional to the intensity of the light of the neighbouring fireflies. Therefore, the expression based on the attractive function is delineated in the following equation.
From Eq. (3), the attractive capability at distance \(D_{XY} = 0_{{}}\) is denoted as \(\alpha_{0}\). For a fixed, characteristic length becomes
The Cartesian distances among two different fireflies \(X\,\,{\text{and}}\,\,Y\) are denoted as \(P{}_{X}\,{\text{and}}\,\,P_{Y}\) correspondingly. Therefore, the Cartesian distance formula for two fireflies is expressed in the following expression.
Then the movement of attraction from one fly to another fly, i.e., \(X\,\,{\text{and}}\,\,Y\) are characterized in Eq. (6). The determination of firefly movement with respect to the attracting capability is defined as,
From Eq. (6), \(\alpha_{0} e^{{ - \beta \,D_{{_{XY} }}^{2} }} (P_{Y} - P_{X} )\) be the attractive term and \(J\eta\) be the term containing random variable ranges from [0, 1].
2.1.2 Improved firefly algorithm
In the firefly algorithm, the best optimal value provides the firefly with very high brightness. The model of other classical approaches suffers from the trapping of local minima due to the nonlinear design strategy. Therefore improved firefly algorithm was developed to improve the trapping of local minimum value. Here, an additional term is added to the standard firefly algorithm to achieve better randomness and efficiency of the firefly. Then the difference among the arbitrary firefly and the \(X\)th position of the firefly is obtained thereby achieving the effective randomness of the firefly [30].
The brightest firefly found among the firefly group is said to be known as best firefly \(B_{F}\). The random number is denoted as \(R_{4}\) and the value ranges from [0,1]. Even though the computational complexity is high in case of improved firefly optimization, the local trapping quality is good for tuning the \(J\) and \(K\) parameter value. Therefore, the modified firefly algorithm is referred to as improved firefly algorithm. Then the updated expression is determined in the following section.
where \(A \ne X\;{\text{and}}\;Y.\) \(K(P_{A} - P_{X} )\) be the term containing random variable ranges from [0, 1]. The pseudo-code for improved firefly algorithm is delineated as follows.
2.1.3 Chaotic firefly algorithm
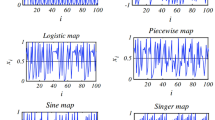
The fireflies are also referred to as lighting bugs that are found during the night time particularly in the summer season [31]. In chaotic optimization approaches, the chaotic firefly variables replace the random variables [32]. The chaotic firefly algorithm selects the initial population of the search algorithm. The absorption coefficient \(\beta\) found in the solution space and the firefly positions is updated by employing the chaotic sequence demonstrated by the chaotic maps that are represented in Table 1. From Eq. (6), the step size J affects the random vector \(\eta\) and the chaotic time series replaces the third term and the mathematical expression is obtained as follows.

From Eq. (8), the chaotic maps are represented by \(CHAOS_{X}^{K}\); where the superscript K represents the type of chaotic map to be determined. In a similar way, the attractive term \(\alpha_{0}\) from Eq. (6) is substituted by the chaotic term that is represented in the following equation.
The random motion of the firefly plays a significant role in determining the candidate [where \(\alpha_{0}\) (attractive term) relies on \(\beta\) (light absorption coefficient)] from the population. In addition to these two limiting cases \((\beta \to 0;\,\,\alpha \to \alpha_{0} )\) are formulated while determining \(\beta\). Therefore, the entire fireflies can spot one another and they start moving randomly when \(\beta\) becomes \(\infty\).
The light absorption coefficient then employs in characterizing the dissimilarities in the attractiveness as well as the values are vitally imperative to determine the convergence capability and the speed of the firefly algorithm.

2.2 Sine–cosine (SC) algorithm
In general, the optimization approach based on population initiates its optimization method containing a random solution. The sine–cosine algorithm was first developed by Mirjalili in the year of 2016 for solving several optimization issues [33]. The SC algorithm utilizes sine and cosine functions to determine the best optimal solution. In SCA, the distance and the movement among each feature solution and the best member are affected. Therefore, the SCA employs a balance equation utilizing two phases namely the exploration phase and the exploitation phase. The solutions are changed randomly in the exploration case whereas, in the exploitation phase, the random variables are less.
The updating equation for both the exploitation and the exploration phase is expressed in the following equation.
From Eqs. (11) and (12), \(P_{X}^{T}\) signifies the position of the current solution, where \(X\) represents the dimension and \(T\) represents the iteration. The random numbers are represented as \(R_{1} ,R_{2} \;{\text{and}}\;R_{3}\). The position of the destination point in Xth dimension is represented as \(Z_{X}^{{}}\); || represents the absolute value.
Then the combined equation based on sine–cosine algorithm is represented as follows. Therefore,
From Eq. (13), the random number is denoted by \(R_{4\,\,}\) and the random values may range from [0, 1]. From Eqs. (11)–(13), the region of next position that present in between the destination and the solution is denoted by \(R_{1}\); the movement outwards the destination is represented by \(R_{2}\). The random weight is represented utilizing two different constraints determined in the following equation.
Moreover, the exploration and the exploitation phase of the algorithm are to be balanced for finding the search space region. Therefore, Eqs. (11) to (12) are modified for balancing both the phases that are determined in the following equation. Therefore,
From Eq. (15), the maximum iteration number and the current iterations are represented by \(t\) and \(T\), respectively, and the constant term is denoted as \(A\).
The general procedure of the sine–cosine algorithm is represented in the following section.
2.2.1 Chaotic sine–cosine algorithm
In this section, the parameters \(R_{1}\), \(R_{2}\) and \(R_{3}\) of Eq. (13) are modulated using chaotic maps during iterations that are described in Sect. 3 [Eqs. 18 to 20]. The meta-heuristic algorithms use a conventional method to find the best optimal solutions that are based on iteration; also it relies on random solutions to replicate the naturally occurring phenomenon [34]. More clear that, there occurs a major shortcoming based on the solution outcome and the convergence speed since these solutions rely upon random parameters. Consequently, the random parameters are replaced with the chaotic parameters also; numerous chaotic mapping functions are employed to enhance the overall performances of the optimization approach [35]. In addition to this, new parameters are introduced to replace the random numbers and functions with various deterministic numbers [36]. Also, the standard distributive functions namely Gaussian distribution [37] and uniform distributions are replaced with the non-standard distributive functions namely chaotic-based optimization algorithms. Moreover, the chaotic forms of the sine–cosine algorithms are employed in boosting the performances of the sine–cosine algorithm [38].
3 Proposed CSCF algorithm
Numerous meta-heuristic-based approaches are deliberated to eliminate the computational complexities of several existing approaches namely complex and tricky derivations, the requirement of very large memory space, initial value sensitivity etc. In general, the meta-heuristic-based approaches are deliberated to reduce the computational complexities of several existing approaches that contain complex and tricky derivations, the requirement of very large memory space, initial value sensitivity etc. However, several optimization algorithms such as firefly algorithm, sine–cosine algorithm, particle swarm optimization algorithm have few drawbacks such as computational complexity and convergence speed. So to overcome such shortcomings, this paper aims in developing a novel chaotic sine–cosine firefly (CSCF) algorithm with numerous variants to solve optimization problems.
In this paper, the improved firefly algorithm and the sine–cosine optimization algorithms are integrated to form a sine–cosine firefly approach. Then the integrated algorithm aims in hybridizing the chaotic algorithm [i.e. chaotic sine–cosine firefly (CSCF) approach] containing various chaotic mapping functions. The proposed CSCF approach is operated under various chaotic phases and the optimal chaotic variants containing the best chaotic mapping are selected. The general architecture of the proposed CSCF algorithm is represented in Fig. 1. The initial step involves in parameter initialization followed by the random initialization of the function. Then the fitness function is evaluated and if the trial is less than the limit, the chaotically tuned Jth and Kth of the firefly algorithm is formulated to obtain the best optimal solution; else the chaotically tuned R1, R2 and R3 of the sine–cosine algorithm are formulated to obtain the best optimal solution. The boxes that are highlighted characterize the new variants of the original algorithm. The diverse variants of CSCF approaches are delineated in the following section.

Flow chart representation of a CSCF algorithm
3.1 Variants of CSCF approach
The following subsections describe numerous variants of the CSCF (sine–cosine algorithm and firefly algorithm) approach in accordance with the tuned parameters.
3.1.1 Variant-I
The parameter \(J\) of Eq. (7) is modified by chaotic maps (CM). Therefore, the new version of Eq. (7) is determined in the following equation.
From Eq. (16), the chaotic random movement of the firefly is denoted as \(J^{CHAOS(.)}\) and are determined by \(J^{CHAOS(.)} = J.CM_{I}\). Here, \(J\) is a fixed value in standard firefly, while in variant-I, it evolves chaotically.
3.1.2 Variant-II
In this version, the parameter \(K\) of Eq. (7) is modified such that it is changed chaotically using the chaotic maps (CM). Therefore,
From the above equation, \(K^{CHAOS(.)}\) represents the chaotic fractional difference between the arbitrary fireflies. The standard firefly optimization algorithm generates the random position, whereas the chaotic firefly generates according to the chaotic maps.
3.1.3 Variant-III
The parameter \(R_{1}\) of Eq. (13) is modulated using chaotic maps during iterations. Thus Eq. (13) is changed to,
From Eq. (18), in standard sine–cosine algorithm, \(R_{1}\) is created randomly between 0 and 1, while in variant III, it is a chaotic number between 0 and 1.
3.1.4 Variant-IV
In this version, \(R_{2}\) the parameter is modified such that it is chaotically altered using CM. Then,
where in the standard SC algorithm, the random number varies from 0 to 1, while in variant IV, it is a chaotic number between 0 and 1.
3.1.5 Variant-V
The parameter \(R_{3}\) of Eq. (13) is modulated using chaotic maps during iterations. Thus Eq. (13) becomes,
From the above equation, \(R_{3}^{CHAOS(.)}\) is the chaotic random value that ranges from 0 to 1.
4 Result and discussions
In this section, various experiments are conducted to evaluate the efficiency and the performances of the chaotic sine–cosine firefly (CSCF) algorithm. Owing to its hypothetical nature, various chaotic functions and benchmark functions are discussed to obtain better optimal results. In addition to this, the proposed CSCF algorithms are compared with several other optimization algorithms such as firefly (FF) algorithm [30], sine–cosine algorithm (SCA) [33], particle swarm optimization (PSO) approach [39], artificial bee colony (ABC) optimization algorithms [40] to evaluate the effectiveness of the CSCF algorithm. Furthermore, followed by the comparison of optimization algorithms, a detailed description of the real-time engineering applications is delineated in the following section. The experimental analysis is carried out under the platform of MATLAB R2016a by using the operating system as Windows 10. The simulations are done on a central processing unit containing Intel Core (TM) i7-6700HQ CPU @ 2.60 GHz with 8G of memory. Then the chaotic benchmark functions and the test functions are explained as follows.
4.1 Chaotic mapping (CM) and benchmark functions
In this section, numerous chaotic benchmark functions are utilized to improve the system performance of the CSCF algorithm [41]. The complex operations, its nature and several other possessions of these chaotic functions are obtained easily from the definitions. Then the chaotic benchmark functions for CSCF algorithm is obtained in Table 1. Table 2 represents the benchmark functions with three different models namely uni-modal test function, multi-modal test function and three fixed dimensions multi-modal test function. Here 20 benchmark functions are employed to investigate the system performances. In Table 2, Fn represents the test functions, DM and FOV signify the dimensional value and the optimal value, respectively.
4.2 Comparison of CSCF with sine–cosine firefly algorithm
In this section, the chaotic sine–cosine firefly is compared with sine–cosine and firefly algorithms by using four different parameters namely mean (µ) standard deviation (σ), best (B) and worst (W) values. For each functions, the size of the population is predetermined as 20 and the subsequent dimensional values may range from 20, 50 and 100, respectively. In addition to this, the maximum iteration value is set as 500. This paper adopts the technique of scientific notations and the optimal value for various optimization algorithms are represented in bold. The comparative analyses of CSCF and sine–cosine firefly algorithms are mentioned in Table 3. From the table, the comparative analysis reveals that the proposed CSCF algorithm provides better performances when compared with SCF approach. Then Table 4 provides the comparative analysis of CSCF with SCF for different dimensions namely D = 20, D = 50, D = 100. Then the convergence curve is compared for the proposed CSCF and SCF algorithms for various dimensions and the graphical analysis for four functions namely Fn5, Fn10, Fn15 and Fn20 for D = 50 is mentioned in Fig. 2. The analysis reveals that the proposed CSCF approach enhances the solution to a very less value. Also, these function curves signify the exploitation capability of the proposed CSCF approach.

Convergence curve for various functions a Fn5, b Fn10, c Fn15 and d Fn20 with D = 50
4.3 Comparison of CSCF with various optimization algorithms
This section demonstrates the comparative analysis of the proposed CSCF algorithm with various other optimization algorithms such as firefly (FF) algorithm [30], sine–cosine algorithm (SCA) [33], particle swarm optimization (PSO) approach [39], artificial bee colony (ABC) optimization algorithms [40] to evaluate the effectiveness of the CSCF algorithm. Here, the dimension value range is assumed to be D = 100, where each algorithm is implemented by using 20 benchmark functions. Moreover, the size of the initial population is set as 20. Therefore, the comparative analysis of various optimization approaches with respect to mean (µ) standard deviation (σ) is explained in Table 5. Also, the comparative analysis for various optimization approaches with respect to best value (B) and worst value (W) is explained in Table 6. The experimental analysis based on average rank testing of the CSCF approach is compared with FF, SCA, PSO and ABC in Table 7. Therefore, the experimental results for two different types of tests namely Wilcoxon’s rank-sum (R-S) test and Wilcoxon’s multiple problem (M-P) tests for the proposed CSCF algorithm based on twenty benchmark functions are described in Table 7. In order to determine the statistical differences among other optimization algorithm and the proposed CSCF algorithm, the Wilcoxon’s (R-S) test is employed. To confirm the validity generated in the above tables are determined by the Wilcoxon’s (M-P) tests. In addition to this, the value of \(P < (\varepsilon = 0.1\;{\text{and}}\;0.05)\) and \(r^{ + } \;{\text{and}}\;r^{ - }\) values are greater for all respective cases. Thus the analysis reveals that the proposed CSCF algorithm provides better performances when compared to all other approaches [42].
4.4 Real-time engineering design problem for CSCF
In order to evaluate the metaheuristic approaches, it is necessary to implement the proposed algorithm on to the real-time engineering problem. Also, these real-time engineering problems constitute numerous equality and inequality constraints and hence it is necessary to evaluate the constrained problem. In this section, the efficiency and the performances of the proposed CSCF algorithm are solved by evaluating three different types of engineering design problems namely welded beam design \(({\text{WB}}_{D} )\), pressure vessel design \(({\text{PV}}_{D} )\) and tension–compression spring design \((T - {\text{CS}}_{D} )\). These engineering design problems are described briefly in the following section. Here, the initial size of the population is set as 20 and the maximum size of the population is set as 100.
-
A
Illustration 1: problem based on welded beam design \(({\text{WB}}_{D} )\)
This section illustrates problem based on the design of a welding beam \(({\text{WB}}_{D} )\)[43], where the minimum cost function is subjected to several constraints namely the beam’s end deflection \(({\text{BE}}_{D} )\), beam’s bending stress \(({\text{BB}}_{S} )\), shear stress \((S_{S} )\) and buckling load of the bar \(({\text{BB}}_{L} )\). Moreover, the \(({\text{WB}}_{D} )\) comprises of four different types of variables namely \(H(Z_{1} )\), \(L(Z_{2} )\), \(T(Z_{3} )\) and \(B(Z_{1} )\), respectively. The structural model for the problem based on a welding beam \((WB_{D} )\) is represented in Fig. 3.

Design for the welding beam \((WB_{D} )\) problem
The mathematical expression based on the design for the problem based on a welding beam \(({\text{WB}}_{D} )\) is formulated in the following section.
Therefore, the expression for several constraints and variables based on the problem based on the design of a welding beam \(({\text{WB}}_{D} )\) is delineated in the following section.
From the above equation,
Table 8 provides the best solutions for various approaches such as FF, SCA, PSO, ABC and proposed CSCF approaches. Table 9 provides the statistical analysis for the mean (µ) standard deviation (σ), best value (B) and worst value (W).
-
B.
Illustration 2: problem based on pressure vessel design \(({\text{PV}}_{D} )\)
The problem based on pressure vessel design \(({\text{PV}}_{D} )\) aims in minimizing the manufacturing cost function [44]. The structural design of the pressure vessel is represented in Fig. 4 that contains the working pressure and the volume of about 3000 psi and 750 ft3. In addition to this, the pressure vessel design \(({\text{PV}}_{D} )\) comprises of four different variables namely the shell thickness \(S_{T}\) as \(Z_{1}\), Head thickness \(H_{T}\) as \(Z_{2}\), inner radius \(I_{R}\) as \(Z_{3}\), the cylindrical section having the length l as \(Z_{4}\). Here, the continuous variables are denoted as \(Z_{3}\) and \(Z_{4}\) where the integral multiples are denoted as \(Z_{1}\) and \(Z_{2}\), respectively. Then the mathematical expression based on the design for the problem based on pressure vessel design \(({\text{PV}}_{D} )\) is formulated in the following section.

Design for pressure vessel design \((PV_{D} )\) problem
Table 10 provides the best solutions for various approaches such as FF, SCA, PSO, ABC and proposed CSCF approaches. Table 11 provides the statistical analysis for the mean (µ) standard deviation (σ), best value (B) and worst value (W).
-
C.
Illustration 3: problem based on tension–compression spring design \((T - {\text{CS}}_{D} )\)
Figure 5 describes the structural model for the problem based on tension–compression spring design \((T - {\text{CS}}_{D} )\). Here, the \((T - {\text{CS}}_{D} )\) is considered as one of the continuous constrained problem developed by Belegundu [45]. Moreover, the tension–compression spring design \((T - {\text{CS}}_{D} )\) comprises of four different parameters namely diameter of the coil \((D_{C} )\), active coil number \((N_{C} )\) with the diameter \((D)\). Then the mathematical expression based on the design for the problem based on tension–compression spring design \((T - {\text{CS}}_{D} )\) is formulated in the following section.

Design for tension–compression spring design \((T - CS_{D} )\) problem
Then the design variables for the problem based on tension–compression spring design \((T - {\text{CS}}_{D} )\) are delineated in the following Section. \(0.05 \le D \le 2;\;0.25 \le D_{C} \le 1.3\) as well as \(2 \le D_{C} \le 15\). Table 12 provides the best solutions for various approaches such as FF, SCA, PSO, ABC and proposed CSCF approaches. Table 13 provides the statistical analysis for the mean (µ) standard deviation (σ), best value (B) and worst value (W).
Then, various chaotic variants namely.
Variant-I, Variant-II, Variant-III, Variant- IV, and Variant- V of the novel CSCF algorithm are employed in solving the above-mentioned three engineering problems namely \(P_{1} ,\,P_{2} ,\,P_{3}\) that are represented in Table 14. Figure 6 explains the ranking system of five different variants of the CSCSF algorithm. From the graphical analysis, it is noted that the fourth variant of the circle mapping provides minimum mean absolute error (MAE) when compared with all other variants. The term MAE is defined as the average value obtained by the absolute difference among the actual value and the predicted value. Finally, Fig. 7 describes the convergence time with respect to all the five variants. The graphical analysis reveals that the variant-II comprises of less convergence time during the running process when compared with all other variants.

MAE versus variants for a P1, b P2, c P3

Convergence time versus variants
5 Conclusion
This paper proposed a novel chaotic sine–cosine firefly (CSCF) algorithm with numerous variants to solve optimization problems such as computational complexity, memory space, tricky derivations, efficiency, and convergence speed. The chaotic form of two algorithms namely the sine–cosine algorithm (SCA) and the Firefly (FF) algorithms are integrated to improve the convergence speed and efficiency to minimize the complexity issues. Moreover, the proposed CSCF approach is operated under various chaotic phases and the optimal chaotic variants containing the best chaotic mapping is selected. Then various experiments are conducted to evaluate the efficiency and the performances of the chaotic sine–cosine firefly (CSCF) algorithm. Owing to its hypothetical nature, various chaotic functions and benchmark functions are discussed to obtain better optimal results. Furthermore, the proposed CSCF algorithms are compared with several other optimization algorithms such as firefly (FF) algorithm, particle swarm optimization (PSO) approach, artificial bee colony (ABC) optimization algorithms to evaluate the effectiveness of the CSCF algorithm. Finally, the efficiency and the performances of the proposed CSCF algorithm is solved by evaluating three different types of engineering design problems to prove the efficiency, robustness and effectiveness of the system.
References
Dhiman G, Kumar V (2018) Emperor penguin optimizer: a bio-inspired algorithm for engineering problems. Knowl-Based Syst 159:20–50
Jiang J, Meirong Xu, Meng X, Li K (2020) STSA: a sine tree-seed algorithm for complex continuous optimization problems. Phys A 537:122802
Sundararaj V, Anoop V, Dixit P, Arjaria A, Chourasia U, Bhambri P, Rejeesh MR, Sundararaj R (2020) CCGPA-MPPT: cauchy preferential crossover-based global pollination algorithm for MPPT in photovoltaic system. Prog Photovolt Res Appl 28:1128–1145
Mirjalili S, Lewis A (2016) The whale optimization algorithm. Adv Eng Softw 95:51–67
Wang Y, Li H, Huang T, Li L (2014) Differential evolution based on covariance matrix learning and bimodal distribution parameter setting. Appl Soft Comput 18:232–247
Deb K (2000) An efficient constraint handling method for genetic algorithms. Comput Methods Appl Mech Eng 186(2):311–338
Bryar AH, Tarik AR (2020) Operational framework for recent advances in backtracking search optimisation algorithm: A systematic review and performance evaluation. Appl Math Comput 370:124919
Bryar AH, Tarik AR (2020) Datasets on statistical analysis and performance evaluation of backtracking search optimisation algorithm compared with its counterpart algorithms. Data in Brief 28:105046
Moradi M, Parsa S (2019) An evolutionary method for community detection using a novel local search strategy. Phys A 523:457–475
Vinu S (2019) Optimal task assignment in mobile cloud computing by queue based ant-bee algorithm. Wirel Pers Commun 104(1):173–197
Rejeesh MR (2019) Interest point based face recognition using adaptive neuro fuzzy inference system. Multimed Tools Appl 78(16):22691–22710
Dunia S, Ramzy A (2018) Chaotic sine-cosine optimization algorithms. Int J Soft Comput 13(3):108–122
Yang X (2010) Firefly algorithm, stochastic test functions and design optimisation. Int J Bio-inspir Comput 2(2):78–84
Vinu S, Muthukumar S, Kumar RS (2018) An optimal cluster formation based energy efficient dynamic scheduling hybrid MAC protocol for heavy traffic load in wireless sensor networks. Comput Secur 77:277–288
Sundararaj V (2016) An efficient threshold prediction scheme for wavelet based ECG signal noise reduction using variable step size firefly algorithm. Int J Intell Eng Syst 9(3):117–126
Marouani H, Fouad Y (2019) Particle swarm optimization performance for fitting of levy noise data. Phys A 514:708–714
Sundararaj V (2019) Optimised denoising scheme via opposition-based self-adaptive learning PSO algorithm for wavelet-based ECG signal noise reduction. Int J Biomed Eng Technol 31(4):325
Jiang J, Feng Y, Zhao J, Li K (2017) Data ABC: a fast ABC based energy-efficient live VM consolidation policy with data-intesive energy evaluation model. Future Gener Comput Syst 74:132–141
Rashedi E, Nezamabadipour H, Saryazdi S (2009) GSA: a gravitational search algorithm. Inf Sci 179(13):2232–2248
Hatamlou A (2013) Black hole: a new heuristic optimization approach for data clustering. Inf Sci 222:175–184
Sadollah A, Bahreininejad A, Eskandar H, Hamdi M (2013) Mine blast algorithm: a new population based algorithm for solving constrained engineering optimization problems. Inf Sci 13:2592–2612
Kashan AH (2014) League Championship Algorithm (LCA): an algorithm for global optimization inspired by sport championships. Appl Soft Comput 16:171–200
Sulaiman MH, Mustaffa Z, Saari MM, Daniyal H (2020) Barnacles Mating Optimizer: a new bio-inspired algorithm for solving engineering optimization problems. Eng Appl Artif Intell 87:103330
Chegini SN, Bagheri A, Najafi F (2018) PSOSCALF: a new hybrid PSO based on Sine Cosine Algorithm and Levy flight for solving optimization problems. Appl Soft Comput 73:697–726
Yang XS (2008) Nature-inspired metaheuristic algorithms, (Chapter 8). Luniver Press, Cambridge
Guo M-W, Wang J-S, Yang X (2020) An chaotic firefly algorithm to solve quadratic assignment problem. Eng Lett 28(2):337–342
Yang XS (2009) Firefly algorithms for multimodal optimization, Stochastic algorithms: foundations and applications. SAGA Lecture Notes Comput Sci 5792:169–178
Jagatheesan K, Anand B, Sen S, Samanta S (2020) Application of chaos-based firefly algorithm optimized controller for automatic generation control of two area interconnected power system with energy storage unit and UPFC. In: Applications of firefly algorithm and its variants, pp 173–191. Springer, Singapore
Agarwal S, Singh AP, Anand N (2013) Evaluation performance study of Firefly algorithm, particle swarm optimization and artificial bee colony algorithm for nonlinear mathematical optimization functions. In: 2013 fourth international conference on computing, communications and networking technologies (ICCCNT), pp 1–8. IEEE
Dash J, Dam B, Swain R (2020) Improved firefly algorithm based optimal design of special signal blocking IIR filters. Measurement 149:106986
Dash S, Abraham A, Luhach AK, Mizera-Pietraszko J, Rodrigues JJPC (2020) Hybrid chaotic firefly decision making model for Parkinson’s disease diagnosis. Int J Distrib Sens Netw 16(1):1550147719895210
Gandomi AH, Yang XS, Talatahari S, Alavi AH (2013) Firefly algorithm with chaos. Commun Nonlinear Sci Numer Simul 18(1):89–98
Mirjalili SA (2016) SCA: a sine cosine algorithm for solving optimization problems. Knowl-Based Syst 96:120–133
Guesmi T, Farah A, Marouani I, Alshammari B, Abdallah HH (2020) A new chaotic sine cosine algorithm for chance-constrained economic emission dispatch problem including wind energy. IET Renewable Power Generation
Hui Lu, Wang X, Fei Z, Qiu M (2014) The effects of using chaotic map on improving the performance of multi-objective evolutionary algorithms. Math Probl Eng 2014:1–16
Trelea IC (2003) The particle swarm optimization algorithm: convergence analysis and parameter selection. Inf Process Lett 85:317–325
Fu W, Wang K, Li C, Li X, Li Y, Zhong H (2018) Vibration trend measurement for a hydropower generator based on optimal variational mode decomposition and an LSSVM improved with chaotic sine cosine algorithm optimization. Meas Sci Technol 30(1):015012
Liang X, Cai Z, Wang M, Zhao X, Chen H, Li C (2020) Chaotic oppositional sine–cosine method for solving global optimization problems. Eng Comput 36(3):1–17
Tsai C, Huang K, Yang C, Chiang M (2015) A fast particle swarm optimization for clustering. Soft Comput 19(2):321–338
Karaboga D, Ozturk C (2011) A novel clustering approach: artificial bee colony (ABC) algorithm. Appl Soft Comput 11(1):652–657
Rizk-Allah RM, Hassanien AE, Bhattacharyya S (2018) Chaotic crow search algorithm for fractional optimization problems. Appl Soft Comput 71:1161–1175
Jiang J, Yang Xi, Meng X, Li K (2020) Enhance chaotic gravitational search algorithm (CGSA) by balance adjustment mechanism and sine randomness function for continuous optimization problems. Phys A 537:122621
Coello CA (2000) Use of a self-adaptive penalty approach for engineering optimization problems. Comput Ind 41:113–127
Onwubolu GC, Babu BV (2004) New optimization techniques in engineering. Springer, Heidelberg
Belegundu AD (1985) A study of mathematical programming methods for structural optimization. Int J Numer Methods Eng 21:1601–1623
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Hassan, B.A. CSCF: a chaotic sine cosine firefly algorithm for practical application problems. Neural Comput & Applic 33, 7011–7030 (2021). https://doi.org/10.1007/s00521-020-05474-6
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-020-05474-6