
Abstract
Renewable energy sources are installed into both distribution and transmission grids more and more with the introduction of smart grid concept. Hence, efficient usage of cascaded H-bridge multilevel inverters (MLIs) for power control applications becomes vital for sustainable electricity. Conventionally, selective harmonic elimination equations need to be solved for obtaining optimum switching angles of MLIs. The objective of this study is to obtain switching angles for MLIs to minimize total harmonic distortion. This study contributes to the solution of this problem by utilizing two recently developed intelligent optimization algorithms: multi-verse optimization algorithm and salp swarm algorithm. Moreover, well-known particle swarm optimization is utilized for MLI optimization problem. Seven-level, 11-level and 15-level MLIs are used to minimize total harmonic distortions. Simulation results with different modulation indexes for seven-, 11- and 15-level MLIs are calculated and compared in terms of the accuracy and solution quality. Numerical calculations are verified by using MATLAB/Simulink-based models.
Similar content being viewed by others

Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
With the introduction of the smart grid concept, integration of renewables into power systems is getting more attention day by day. Several different topologies of MLIs and their implementations in renewable technologies can be found in [1]. As it is known, the outputs of the photovoltaics (PVs) are dependent on the weather parameters, and they have a fluctuating nature especially in cloudy days. These fluctuations may be mitigated by using inverters; hence, new standards are employed. For efficient operation of power distribution systems, IEEE 1547 [2] standard has been developed. In the USA, California state started using Rule 21 [3], which makes it mandatory for PV panel owners to have inverters. Importance of MLIs was signified before. For instance in [4], it was stated that switching losses can be reduced due to lower switching frequency. Hence, they can be used together with renewables with less voltage fluctuation problems.
If switching angles of MLIs are selected properly, total harmonic distortion (THD) can be minimized. Development of methods for the elimination of higher-order terms of harmonics in MLIs goes back to 70s [5]. For canceling higher-order terms of harmonics, [6] used the resultant theory. Optimum switching angles were determined; however, it was not easy to solve high-order polynomials when the number of MLI levels increased. In a recent study [7], the authors determine optimum switching angles by using Groebner bases and symmetric polynomials theory. However, the computations have to use symbolic computation toolboxes and cannot be easily implemented on microcontrollers. To overcome this problem, another two-level algorithm was developed in [8]. Other than analytical-based methods, numerical methods such as Newton–Raphson method and sequential quadratic programming were also used to find optimal switching angles of the MLIs [9, 10]. MATLAB’s fsolve function-based numerical method was used in [11]. Apart from derivative-based numerical methods, non-derivative-based methods were also used. Population-based ones such as genetic algorithms [4, 12], bee algorithm [13], harmony search method [14, 15], particle swarm optimization (PSO) [16,17,18] and non-population-based ones such as generalized pattern search algorithm [19] were used in optimization problems in MLIs. A more detailed review on solution algorithms used for MLIs can be found in [20]. More specifically, review on implementation of meta-heuristic methods on converter problem is detailed in [21] and in [22]. There are also more recent studies available in the literature. One of them uses the modified version of grey wolf optimization (GWO) algorithm to minimize harmonics in hybrid MLIs [23]. Selective harmonics elimination problem is solved by using whale optimization algorithm (WOA) in [24]. The authors of [25] use a modified version of WOA in solving hybrid cascaded MLI. The impact of DC sources on selective harmonic elimination is optimally determined in MLIs by using teaching–learning-based optimization method [26]. Moreover, [27] aims to design a MLI topology with minimum switch counts.
It is known that numerical optimization methods based on derivative information may reach the optimal solutions faster compared to heuristic optimization methods. However, the derivatives of the analytical functions are not always possible to obtain. Thus, numerical optimization problems may face convergence problems. Hence, population-based optimization methods have become popular. These type of methods generally mimick processes from nature [28]. The interactions of the members of the swarms help to solve optimization problems [29, 30]. Initial step of these algorithms includes creating random solution candidates. Next step calculates the objective function values of these solution candidates. Hence, better solutions are obtained by applying some evolutionary techniques such as crossover, mutation and so on [28]. One of the population-based non-derivative methods is PSO. Having observed the behaviors of flocks of the species, the method simulates the food searching process [31]. PSO has been very popular due to success in solving problems and application simplicity. In recent years, there are more attempts to develop new heuristic optimization algorithms. One of them is moth-flame optimization (MFO) method [32] and has been applied in the multilevel inverter optimization problem [33]. Based on the white hole, black hole, wormhole properties of multi-verse physics, multi-verse optimization (MVO) algorithm [34] was developed. MVO is applied to some real problems such as load frequency control [35] and optimization of electricity generation systems [36]. Moreover, combined with neural networks it is successfully applied in intrusion detection systems for computer networks [37]. Another recent application concentrates on solving feature selection problems [38]. Another recent algorithm uses behaviors of salp swarms: salp swarm algorithm (SSA) [39]. Even recently developed, SSA can solve several real-life problems from several different areas. For example, in image processing area, an improved version of SSA is proposed to solve image segmentation problem [40]. Histopathology images were used to detect prostate cancers utilizing a fuzzy-integrated SSA in [41]. Soil water retention curve parameters were determined and compared to those of differential evolution (DE) and PSO, and it was found that SSA provided the smallest sum of squared errors [42]. An application related to mining and geotechnical engineering focuses on hyper-parameter optimization of SVM models for fiber-reinforced cement paste backfilll (CPB) datasets [43] recently. A wrapper-based kernel extreme learning machine is utilized with SSA to classify the digital mammograms in an efficient and optimized way in [44]. In [45], the authors have optimized the artificial neural network (ANN) algorithm that estimates the compressive strength of concretes that contain a supplementary cementitious material named as ground granulated blast furnace slag using a multiobjective SSA. Another application is to cloud computing area by proposing a combination of SSA and sine–cosine algorithm-based multiobjective optimization algorithm to optimally place virtual machines [46]. In electrical power systems area, SSA is used to optimally determine the parameters of photovoltaic cells [47]. A modified version is developed and is applied to improve the maximum power point tracking and ride-through ability of variable speed generators in [48]. Another application area is smart grids: The authors of [49] determined the size and capacity of distributed generators on distribution systems using SSA. Optimal load frequency control problem of renewable power systems is also solved by SSA [50]. Furthermore, with the help of SSA, hydrogen consumption of super-capacitors is recently minimized under fluctuated load conditions [51]. As given in [52], SSA has many advantages and few disadvantages compared to other methods such as genetic algorithms [53], differential evolution method [54], cuckoo search algorithm [55] and so on. From these, one may find the followings more significant. The SSA needs to tune less parameters. It has powerful neighborhood search capability, and the implementation of the algorithm is easy.
As the literature review states, the performances of the MVO and SSA in dealing with engineering problems are remarkable. Hence, this paper extends a previous study [33] both in terms of the used model and the applied methodology. It uses SSA and MVO aiming to eliminate harmonics and to minimize total harmonic distortion (THD) in multilevel converters. Several numerical simulation results of seven-level, 11-level and 15-level MLIs using MVO and SSA are calculated and compared to each other. For comparison, simulations are also performed using PSO which is a well-known population-based optimization method. The results of the numerical calculations are verified by using MATLAB/Simulink models. In brief, the contributions of this study can be summarized as follows:
-
An optimization model that aims to eliminate the harmonics and to minimize THDs is solved.
-
SSA and MVO are implemented to solve the optimization model. The numerical results of performed simulations of the 7-, 11-, and 15-level MLIs are compared both in terms of numerical accuracy and quality. Moreover, the numerical results obtained using MVO and SSA are compared to the solutions obtained by using PSO.
-
MATLAB/Simulink model for seven-level MLI is built. THD values are calculated using FFT tool to compare to the ones obtained by using the heuristic optimization methods.
The organization of the paper is briefly given as follows: Sect. 2 gives information on cascaded H-bridge MLIs. Then, the working principles of MVO, SSA and PSO are explained. Numerical results of the calculations are provided by using different modulation indexes, and the results are illustrated. Then, simulations are performed by using developed MATLAB/Simulink models. The final section concludes the paper.
2 Cascaded H-bridge multilevel inverters
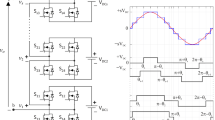
Figure 1 shows simple illustration of a cascaded H-bridge MLI with seven levels. Note that DC sources have equal magnitudes and are connected to a single-phase full-bridge or H-bridge inverter. Here, each inverter level produces \(+V_{\mathrm{dc}}\), 0, or \(-V_{\mathrm{dc}}\) depending on the connections of the DC sources to AC outputs. It should be noted that the combinations of the switches \(S_i\) are important in outputs [56].

Single-phase, seven-level cascaded H-bridge MLI
For the seven-level inverter, stepped output voltage graph of seven-level inverter and its corresponding conducting angles are shown in Fig. 2.

Voltage output of seven-level cascaded H-bridge MLI
The number of output voltage levels is a function of separate DC sources and may be given as \(2\times \mathbf{k }+1\) where k is the number of separate DC sources. Fourier transform of stepped waveform with s steps is shown below [56]:
In Eq. (1), \(\omega\) and \(V_{\mathrm{dc}}\) represent the angular velocity and the voltage magnitude of the DC source, respectively. Note that \(\theta _i\) shows the conducting angle of step i. After normalization according to \(V_{\mathrm{dc}}\) is applied, the magnitudes of the coefficients of Eq. (1) can be determined by using the following expression [56]:
where the switching angles \(\theta _1, \theta _2, \ldots , \theta _n\) must satisfy the constraints given below:
Total harmonic distortion (THD) is the ratio of the summation of voltage magnitudes with odd indexes to the main voltage component and can be mathematically shown as:
Conventionally, the optimization models aim to minimize lower-order odd harmonics. This approach is briefly summarized as follows. The number of harmonics that is possible to be eliminated is less than the number of H-bridges (HBs). For example if a MLI with three HBs is considered, then two lower-order harmonics can be eliminated by solving the equations given in [33]:
In (5), \(m_1\) is the modulation index defined as \(V_{L}^{*}\over {V_{\mathrm{Lmax}}}\). Note that \(V_{L}^*\) represents the amplitude command of the inverter for a sine wave output phase voltage and \(V_{\mathrm{Lmax}}\) represents the maximum attainable amplitude of the inverter [56]. F(k) functions should be equal to 0 to cancel the odd harmonics.
However, since IEEE 519 standard forces to minimize the first fifty harmonics [57, 58], this paper uses the following models to optimize seven, 11 and 15 MLIs:
Note that k is 3, 5 and 7 for seven-, 11- and 15-level MLIs in Eq. 6, respectively.
3 Heuristic methods
This section explains the used heuristic methods for THD minimization problem. The first subsection briefly explains MVO algorithm and details the application of THD minimization problem step by step. Then, similarly, SSA and PSO methods are briefly given in the next subsections. Application of the methods to THD minimization problem is detailed by giving the algorithms and flowcharts.
3.1 Multi-verse optimization
Heuristic methods mimick behaviors from natural processes. Similar to those, MVO uses multi-verse theory in physics. Thus, the optimization process includes mathematical models of white hole, black hole and wormhole [34]. The algorithm assumes that there may exist multiple universes which may have interactions with each other through white holes, black holes and wormholes. In the algorithm, each variable set forms a universe, and each variable in the universe is an object. Then, their corresponding inflation rates, in other words their fitness function values, are calculated. If the inflation rates are high, then the chance of having white holes is high, but the possibility of having black holes is low. This means that the objects with higher inflation rates can send objects by using white holes, and the ones with lower rates can receive objects by using black holes. Then, the roulette wheel chooses white holes in each step by using the following equation:
where \(x_{i}^{j}\), \(x_{k}^{j}\) and \({\text {NI}}(U_i)\) represent the jth object in the universe i, the jth object in the universe k selected by roulette wheel mechanism and the normalized inflation rate of universe i, respectively. Random movements are also needed. This is provided by using wormholes independently from the inflation rates.
The algorithm uses wormhole existence probability (WEP) and travelling distance rate (TDR) to change solutions in the iterations. These parameters are given as follows [34]:
where a and b represent a predefined minimum and a maximum number such as 0.1 and 1, respectively. T shows the maximum number of iterations, and t represents the current iteration. p is a constant called as exploitation factor. Note that the accuracy and the speed of the local search of the algorithm increase as the chosen p value increases.
The equation that defines the movements between the universes is given as follows:
where \({\text {ub}}_j\), \({\text {lb}}_j\) and \(r_i\) represent the upper and lower bounds for the variables and random number between 0 and 1, respectively.
A sample solution candidate set (universes) may look as given below:
Here, \(u_i\) represents the ith universe, \(a_i, \ldots , y_i\) represents the objects in the universes, and d shows the number of objects. In this representation, it is assumed that the objective functions are evaluated and sorted accordingly. Then, after moving objects through white/black holes and wormholes, the new representation may look as follows:
Note that \(z_i\) represents the object values obtained by transfer operation using wormholes.
3.1.1 Implementation of MVO to MLI optimization problem
To apply MVO method in cascaded H-bridge MLI optimization problem, the process is given as follows:
-
1.
The solution process is started by creating random universes in the allowed ranges: \(0 \le \theta _i \le {\pi \over 2}\). Note that each universe is composed of d variables. For seven-level, 11-level and 15-level MLI, d is 3, 5 and 7, respectively. Hence, initial step is creating an N by 3 (for seven-level MLI), N by 5 (for 11-level MLI) and N by 7 (for 15-level MLI) random solution candidates. Note that N is the size of the number of the universes.
-
2.
Then, the universes are sorted according to the numerical results of the evaluations of the fitness function given in Eq. (6). Note that each solution candidate should comply with \(\theta _1 \le \theta _2 \le \cdots \theta _n\).
-
3.
WEP and TDR are calculated using Eqs. (8) and (9), respectively.
-
4.
The universes exchange transfer objects according to the roulette wheel selection process given as follows. For each object in each universe, a random number \(r_1\) is created. If this number is less than normalized inflation rate of the corresponding universe, then an object from kth universe is selected based on the roulette wheel mechanism described in [59]. Otherwise, the object’s location does not change.
-
5.
The best solution in the solution candidate set is found, and its position is set as \(p_i^t\).
-
6.
The positions of the solution candidates are updated.
-
7.
To stop, the algorithm either checks the differences of best solutions of predefined number of iterations or checks the maximum number of iterations. If a stopping decision is not given, the algorithm goes to the second step.
3.1.2 Flowchart of MVO implementation on MLI optimization problem
The flowchart of implementation of MVO to MLI optimization problem is given in Fig. 3.

MVO flowchart
3.2 Salp swarm optimization
SSA mimicks the swarming behavior of salps in the optimization process [39]. To obtain better movement abilities and hence reaching food sources easier, the salps form salp chains. Similar to other heuristic methods, good solutions have more importance in obtaining solutions. Therefore, the best salp, called the leading salp in the chain, is followed by the others. The leading salp aims to move to the food source or in other words to the optimal solution. Hence, all members of the salp population are expected to move to the optimal solution in the end of the process.
The position changes of the leading salps and the followers are performed based on Eqs. (13) and (15) which are given below [39]:
where \(x_j^1\) represents the leader salp, \(F_j\) is the position of the food source, ub and lb represent the upper and lower values, respectively, and \(c_1\), \(c_2\) and \(c_3\) are random numbers.
Parameter \(c_1\) is defined as follows [39]:
where l and L represent the current iteration number and the maximum iteration number. The follower salps use Newton’s law of motion for updating their positions [39]:
Here, \(v_0\) is the initial speed and \(V_{\mathrm{par}}\) is calculated by dividing the final speed to initial speed.
3.2.1 Implementation of SSA to MLI optimization problem
Steps of SSA method to solve MLI optimization problem are given as follows:
-
1.
This step initializes the salps. Each entry in each salp corresponds to the switching angles. They are initialized randomly in the allowed variable ranges. In other words, the number of salps is \(N_s\) and each salp consists of s elements ranging from 0 to \({\pi \over 2}\) satisfying the following condition: \(0 \le \theta _i \le {\pi \over 2}\). The number of the variables of each salp will be different for seven-, 11- and 15-level MLIs. The number of variables for the seven-, 11- and 15-level inverter cases is 3, 5 and 7, respectively.
-
2.
Each salp’s entries are given as inputs to Eq. (6), and the fitness value of each salp is calculated.
-
3.
The best solution of the solution candidates is called the leader. It is found by sorting the salps according to the results of the objective function evaluations. The other solutions, namely the followers, are expected to follow the leader. The position of the leader is updated using Eqs. (13) and (14).
-
4.
The positions of the followers are updated by using Eq. (15).
-
5.
This step decides whether the algorithm stops or continues. It either checks the differences of best solutions of predefined number of iterations or checks the maximum number of iterations. If the algorithm does not stop, it goes to step 2.
3.2.2 Flowchart of SSA implementation on MLI optimization problem
The flowchart of implementation of SSA to MLI optimization problem is given in Fig. 4.

SSA flowchart
3.3 Particle swarm optimization
PSO is developed based on the swarm behavior of the bird flocks while searching for food. The algorithm uses the information of the local and global best values to update the positions of the particles. Thus, the particles are expected to move to the locations that are close to optimal points. In each iteration, the update process of the positions is performed according to the equations given below:
In Eq. (16), \(l_1\) and \(l_2\) are the learning factors, and Spd and loc represent the velocity and the position of the particle, respectively. As stated above, the local and global best values are used to update the velocity. They are represented as the “\({\mathrm {local\,best}}\)” and “\({\mathrm {global\,best}}\),” respectively.
After determination of the velocities, the locations are updated simply by using the following equation:
3.3.1 Implementation of PSO to MLI optimization problem
Steps of PSO method to solve MLI optimization problem are summarized as follows:
-
1.
Initialization step comprises of choosing the control parameters and initialization of the particles. The control parameters are the number of particles and the learning factors \(l_1\) and \(l_2\). Each particle is composed of 3, 5 or 7 entries depending on the level of MLI being investigated. Thus, the elements of each particle should satisfy the following condition: \(0 \le \theta _i \le {\pi \over 2}\).
-
2.
Each particle’s fitness values is computed using Eq. (6). Then, the local and global best values are found.
-
3.
The velocities of the particles are updated using the learning parameters and the local and the global best values using Eq. (16). Then, locations are updated using Eq. (17).
-
4.
The updated particles and their corresponding switching angles are evaluated in Eq. (6). The results are compared to the results obtained in the previous iteration. The better particles are stored.
-
5.
The local and global best values are updated.
-
6.
This step decides whether the algorithm stops or continues. The stopping criterion either checks reaching the number of maximum iterations, or it checks the numerical differences of the best values obtained so far to the ones obtained, i iterations ago. If the decision is stop, the algorithm gives the switching angles as outputs; otherwise, it goes back to the third step.
3.3.2 Flowchart of PSO implementation on MLI optimization problem
The flowchart of PSO to solve MLI optimization problem is given in Fig. 5.

PSO flowchart
4 Tests and results
The tests are performed for seven-level, 11-level and 15-level MLIs. Numerical calculations are done on a laptop with the following specifications: 2.40 GHz, Quad Core CPU and 8.00-GB RAM. As specified above, SSA, MVO and PSO were used for simulation purposes. SSA-, MVO- and PSO-based MATLAB-based source codes provided in [60, 61] are modified and used in solving optimization problem of MLIs.
Simulations are performed 100 times for each modulation index in each case. The control parameters of MVO-, SSA- and PSO-based optimization algorithms are selected experimentally as follows. For MVO, the number of universes is selected as 30. The initial value of WEP is set as 0.2, and this value is linearly increased up to 1. Hence, the chance of obtaining a wormhole increases as iterations increase. Maximum number of iterations is set as 1000. TDR ranges from 0.6838 to 0; thus, the accuracy of local search improves over iterations. For SSA, the number of salps and the number of iterations are chosen as 30 and 1000, respectively. SSA uses control parameter \(c_1\) which is used to balance the exploration and exploitation. This parameter decreases according to Eq. (14), as the iterations evolve. The number of particles for PSO is selected as 30. Both learning factors, \(l_1\) and \(l_2\), are chosen as 2. Inertia factor w is not changed through the iterations and selected as 0.8. Finally, maximum iterations for PSO are set as 1000.
Due to limited space, modulation indexes ranging from 0.4 to 1 with 0.1 increments, their respective switching angles and THDs are given in the following tables. Note that all the quantities given in the tables are the mean of the results of 100 simulations. In Table 1, near optimal switching angles found by MVO, SSA and PSO and their respective THDs are shown for seven-level MLI. It is observed that mean of switching angles and their respective THDs calculated using three methods are found to be very close for this system. Minimum THDs are obtained as \(10.43\%\) for modulation index value of 0.84 for all three methods. Near optimal angles are \(8.613^{\circ }\), \(27.837^{\circ }\), \(49.684^{\circ }\) for SSA \(8.597^{\circ }\), \(27.801^{\circ }\), \(49.709^{\circ }\) for MVO and \(8.613^{\circ }\), \(27.841^{\circ }\), \(49.682^{\circ }\) for PSO for this modulation index.
Similarly, Table 2 shows the mean values of the optimal switching angles and their respective THDs for 11-level cascaded H-bridge MLI. Similar to the previous test case, the simulation results are close to each other with slight differences. Using SSA, minimum THD is calculated as \(6.14\%\) for 0.82 modulation index. The switching angles are \(5.422^\circ\), \(16.541^\circ\), \(28.512^\circ\), \(41.394^\circ\) and \(58.869^{\circ }\). MVO finds the minimum THD similarly for modulation index value of 0.82 with a small difference: \(6.15\%\). Near optimal switching angles for this case are \(5.485^{\circ }\), \(16.485^{\circ }\), \(28.591^{\circ }\), \(41.445^{\circ }\) and \(58.797^{\circ }\). PSO finds the minimum THD for the same modulation index. A THD value of \(6.14\%\) is found with corresponding mean switching angles: \(5.432^{\circ }\), \(16.535^{\circ }\), \(28.512^{\circ }\), \(41.403^{\circ }\) and \(58.865^{\circ }\).
Simulation results of 15-level cascaded H-bridge MLI are shown in Table 3. This time, the differences of the numerical simulation results are not as close as the previous cases. It is seen in the table that THDs found by MVO and PSO are closer to each other; however, smaller compared to those of SSA. For instance, the maximum difference of THDs of three methods is even approximately \(10\%\) for modulation index of 1. SSA may not be able to escape local optimum trap for this case for previously set maximum iteration value of 1000. Both MVO and PSO methods find the lowest THD as \(4.311\%\) for modulation index value of 0.8. Switching angles for this case are found as \(3.930^\circ\), \(11.534^\circ\), \(19.980^\circ\), \(30.302^\circ\), \(38.874^\circ\), \(51.091^\circ\) and \(65.616^\circ\) by using MVO and \(3.879^\circ\), \(11.670^\circ\), \(19.489^\circ\), \(30.419^\circ\), \(38.746^\circ\), \(51.193^\circ\) and \(65.715^\circ\) by using PSO. Minimum THD using SSA is found at the same modulation index level. However, a higher value compared to those of MVO and PSO: \(4.420\%\). Switching angles are \(4.969^\circ\), \(12.667^\circ\), \(20.794^\circ\), 29.779º, \(38.868^\circ\), \(50.964^\circ\) and \(65.290^\circ\).
Figure 6 illustrates the obtained near optimal switching angles using SSA for seven-level, 11-level and 15-level MLIs. From Fig. 6, one may observe the mean values of THDs for three different test systems. In the figure, shaded areas show the standard deviations of the obtained simulation results. It is seen from the figure that for seven- and 11-level MLIs, the standard deviations is low; however for 15-level MLI, modulation indexes higher than 0.8 produce high standard deviations for SSA. When THDs of three tests systems are compared, for most of the modulation indexes, 15-level MLI produces lower values. However, for modulation indexes higher than 0.8 and around 0.5, THDs of 11-level MLIs are better due to high standard deviations obtained for 15-level MLI. THD of seven-level MLI is the worst until a modulation index value is close to 0.9. After that modulation index, THDs of three test cases behave similar. For modulation index of 1, seven-level MLI produces the smallest THD percentage.

Near optimal angles obtained with SSA for seven-, 11- and 15-level MLIs and THD values
Similarly, Figs. 7 and 8 show the obtained near optimal switching angles for seven-level, 11-level and 15-level MLIs using MVO and PSO, respectively. One can easily see from three figures that standard deviations of switching angles calculated using MVO, PSO and SSA are slightly different for seven- and 11-level MLIs. However, the standard deviations of the simulation results of the 15-level MLIs calculated using SSA are worse than the ones obtained with MVO and PSO. But, there is not a significant difference in terms of the standard deviations obtained by MVO and PSO. Thus, MVO- and PSO-based optimization simulation results are more robust.
Figures 7 and 8 also illustrate the mean values of THDs for three test systems. For seven- and 11-level MLIs, the THDs calculated by using three methods are very close to each other. This is different for 15-level MLIs. SSA produces higher standard deviations for modulation indexes between 0.8 and 0.9 compared to those of MVO and PSO. Standard deviations found by using three methods for remaining modulation indexes have slight differences.

Near optimal angles obtained with MVO for seven-, 11- and 15-level inverters and THD values

Near optimal angles obtained with PSO for seven-, 11- and 15-level inverters and THD values
Table 2 shows the obtained mean switching angles for different modulation indexes for 11-level MLI. According to [56], for modulation index 0.8, the following switching angles were obtained: \(\theta _1=6.57^{\circ }\), \(\theta _2=18.94^{\circ }\), \(\theta _3=27.18^{\circ }\), \(\theta _4=45.14^{\circ }\), \(\theta _5=62.24^{\circ }\). Previously, using MFO algorithm [33] for same modulation indexes the following switching angles were computed: \(\theta _1=5.96^{\circ }\), \(\theta _2=18.83^{\circ }\), \(\theta _3=25.97^{\circ }\), \(\theta _4=43.86^{\circ }\),\(\theta _5=61.64^{\circ }\). SSA calculated these values as \(\theta _1=5.59^{\circ }\), \(\theta _2=17.26^{\circ }\), \(\theta _3=29.73^{\circ }\),\(\theta _4=43.35^{\circ }\), \(\theta _5=62.98^{\circ }\), respectively. The switching angles found by MVO are as follows: \(\theta _1=5.53^{\circ }\), \(\theta _2=17.21^{\circ }\), \(\theta _3=29.72^{\circ }\), \(\theta _4=43.37^{\circ }\), \(\theta _5=62.99^{\circ }\). PSO calculated these switching angles as \(\theta _1=5.58^{\circ }\), \(\theta _2=17.25^{\circ }\), \(\theta _3=29.72^{\circ }\), \(\theta _4=43.37^{\circ }\), \(\theta _5=62.99^{\circ }\). From these five sets of different solutions, the THDs found by [56], MFO [33], SSA, MVO and PSO are, \(6.8490\%\), \(6.8698\%\), \(6.1856\%\), \(6.1860\%\) and \(6.1901\%\), respectively. From these results, it is seen that SSA provides a slightly better THD compared to MVO and PSO. The worst THD is obtained by using MFO.
4.1 MATLAB/Simulink results
To further verify the simulation results, a seven-level MLI is built in MATLAB/Simulink as shown in Fig. 9.

Simulink model for seven-level cascaded H-bridge MLI
Then for \(m=0.7\) and \(m=0.8\) modulation indexes, THD values are calculated by using the switching angles found by using the numerical simulation results of SSA given in Table 1: For \(m=0.7\), \(\theta _1=10.533\), \(\theta _2=35.546\) and \(\theta _3=72.350\), and for \(m=0.8\), \(\theta _1=9.803\), \(\theta _2=30.000\) and \(\theta _3=56.733\). Figures 10 and 11 show the stepped voltage waveform of the seven-level MLI using two different modulation indexes and near optimal switching angles. Figures 12 and 13 show the THDs of those configurations using FFT Analysis Tool. It is seen from the figures that for \(m=0.7\), and for \(m=0.8\), THD values of 16.99% and 12.02% are obtained. Compared to the numerical simulation results, 16.05% and 11.01%, the differences are around 1%.

Voltage magnitudes obtained for \(m=0.8\)

Voltage magnitudes obtained for \(m=0.7\)

Obtained THD results for \(m=0.8\) using Simulink model

Obtained THD results for \(m=0.7\) using Simulink model
5 Conclusion and future work
This study approaches harmonic elimination and THD minimization problem for cascaded H-bridge MLIs by using three intelligent optimization algorithms. Two of these algorithms are recently developed intelligent optimization methods: SSA and MVO. For comparison purpose, a more popular algorithm PSO is also implemented. Numerical simulations are performed on seven-level, 11-level and 15-level MLIs. Optimum switching angles by using all methods are calculated and illustrated for modulation indexes ranging from 0.4 to 1. Moreover, THD values are calculated and illustrated as well. Numerical simulations show that both SSA and MVO algorithm are as successful as PSO in solving harmonic elimination problem. However, MVO gives more consistent numerical simulation results with less standard deviation compared to SSA. Moreover, to verify the simulation results, MATLAB/Simulink model for seven-level cascaded H-bridge MLI is developed, and voltages obtained using near optimal switching angles for two representative cases are illustrated. THD values of those cases were also calculated using FFT Analysis Tool. It was observed that the numerical values obtained using the simulated cases and MATLAB/Simulink model provide similar results giving an approximate difference of 1%. In future, the study is planned to be extended by including MLIs with unequal DC sources to model PVs with different outputs. Moreover, hybridization of the optimization methods will be implemented to further improve the performance.
Abbreviations
- \(\omega\) :
-
The angular velocity
- \(\theta _i\) :
-
The conducting angle of step i
- a :
-
A predefined minimum number
- \(a_i, \ldots , y_i\) :
-
The objects in the universes
- b :
-
A predefined maximum number
- \(c_1\) :
-
Exploration and exploitation parameter in SSA
- \(c_2\) :
-
Random number in the interval [0,1]
- \(c_3\) :
-
Random number in the interval [0,1]
- d :
-
The number of objects
- \(F_j\) :
-
The position of the food source
- k :
-
The number of separate DC sources
- L :
-
Maximum iteration number
- l :
-
Current iteration number
- \(l_i\) :
-
Learning factors
- \({\text {lb}}_j\) :
-
The lower bound for the variables
- \({\text {loc}}\) :
-
Location of the particle
- \(m_1\) :
-
Modulation index
- \(N_s\) :
-
Number of salps
- \({\text {NI}}(U_i)\) :
-
The normalized inflation rate of universe i
- p :
-
Exploitation factor
- \(r_i\) :
-
Random number between 0 and 1
- s :
-
Number of unknowns in SSA
- Spd:
-
Velocity of the particle
- T :
-
Maximum number of iterations
- t :
-
The current iteration
- \(u_i\) :
-
The ith universe
- \({\text {ub}}_j\) :
-
The upper bound for the variables
- \(v_0\) :
-
The initial speed
- \(V_i\) :
-
The voltage component i
- \(V_{\mathrm{dc}}\) :
-
The voltage magnitude of the DC source
- \(V_{\mathrm{Lmax}}\) :
-
The maximum attainable amplitude of the inverter
- \(V_{L}^*\) :
-
The amplitude command of the inverter for a sine wave output phase voltage
- \(V_{\mathrm{par}}\) :
-
A parameter showing the ratio of final speed to initial speed
- w :
-
Inertia weight
- \(x_j^1\) :
-
The leader salp
- \(x_{i}^{j}\) :
-
The jth object in the universe i
- \(x_{k}^{j}\) :
-
The jth object in the universe k selected by roulette wheel mechanism
- \(z_i\) :
-
The object values obtained by transfer operation using wormholes
- ANN:
-
Artificial neural network
- CPB:
-
Cement paste backfill
- DC:
-
Direct current
- DE:
-
Differential evolution
- FFT:
-
Fast Fourier transform
- GWO:
-
Grey wolf optimization
- HB:
-
H-bridge
- MLI:
-
Multilevel inverter
- MVO:
-
Multi-verse optimization
- PSO:
-
Particle swarm optimization
- SSA:
-
Salp swarm algorithm
- TDR:
-
Travelling distance rate
- THD:
-
Total harmonic distortion
- WEP:
-
Wormhole existence probability
- WOA:
-
Whale optimization algorithm
References
Mohd. Ali JS, Krishnaswamy V (2018) An assessment of recent multilevel inverter topologies with reduced power electronics components for renewable applications. Renew Sustain Energy Rev 82:3379–3399
IEEE Application Guide for IEEE Std (2018) 1547 IEEE standard for inter-connecting distributed resources with electric power systems. IEEE Std. 1547.2-2008
California public utilities commission: Rule 21. http://www.cpuc.ca.gov/Rule21/. Accessed 19 Jan 2019
Ozpineci B, Tolbert LM, Chiasson JN (2005) Harmonic optimization of multilevel converters using genetic algorithms. IEEE Power Electron Lett 3(3):92–95
Patel Hasmukh S, Hoft Richard G (1973) Generalized techniques of harmonic elimination and voltage control in thyristor inverters: part I-harmonic elimination. IEEE Trans Ind Appl IA–9(3):310–317
Chiasson J, Tolbert L, McKenzie K, Du Z (2002) Eliminating harmonics in a multilevel converter using resultant theory. In: 2002 IEEE 33rd annual power electronics specialists conference, 2002. pesc 02, vol 2, pp 503–508
Yang K, Zhang Q, Zhang J, Yuan R, Guan Q, Yu W, Wang J (2017) Unified selective harmonic elimination for multilevel converters. IEEE Trans Power Electron 32(2):1579–1590
Yang K, Lan X, Zhang Q, Tang X (2018) Unified selective harmonic elimination for cascaded h-bridge asymmetric multilevel inverter. IEEE J Emerg Sel Top Power Electron 6(4):2138–2146
Hossam RM, Hashem GM, Marei MI (2013) Optimized harmonic elimination for cascaded multilevel inverter. In: 2013 48th international universities power engineering conference (UPEC), Sept, pp 1–6
Kumar J, Das B, Agarwal P (2010) Optimized switching scheme of a cascade multi-level inverter. Electr Power Compon Syst 38(4):445–464
Tang T, Han J, Tan X (2006) Selective harmonic elimination for a cascade multilevel inverter. In: 2006 IEEE international symposium on industrial electronics, vol 2, July, pp 977–981
Ramkumar S, Kamaraj V, Thamizharasan S (2011) Ga based optimization and critical evaluation she methods for three-level inverter. In: 2011 1st international conference on electrical energy systems (ICEES), Jan, pp 115–121
Kavousi A, Vahidi B, Salehi R, Bakhshizadeh MK, Farokhnia N, Fathi SH (2012) Application of the bee algorithm for selective harmonic elimination strategy in multilevel inverters. IEEE Trans Power Electron 27(4):1689–1696
Majidi B, Baghaee HR, Gharehpetian GB, Milimonfared J, Mirsalim M (2008) Harmonic optimization in multi-level inverters using harmony search algorithm. In: IEEE 2nd international power and energy conference, 2008. PECon 2008, Dec, pp 646–650
Hosseini SH, Shahmohammadi S (2012) A generalized optimization in cascade and modular multi-level inverters by harmony search method. In: 2012 12th international conference on control, automation and systems (ICCAS), Oct, pp 1506–1511
Al-Othman AK, Abdelhamid TH (2008) Elimination of harmonics in multilevel inverters with non-equal dc sources using PSO. In: Power electronics and motion control conference, 2008. EPE-PEMC 2008. 13th, Sept, pp 606–613
Memon MA, Mekhilef S, Mubin M (2018) Selective harmonic elimination in multilevel inverter using hybrid APSO algorithm. IET Power Electron 11(10):1673–1680
Gupta VK, Mahanty R (2015) Optimized switching scheme of cascaded h-bridge multilevel inverter using PSO. Int J Electr Power Energy Syst 64:699–707
Haghdar K, Shayanfar HA (2018) Selective harmonic elimination with optimal dc sources in multilevel inverters using generalized pattern search. IEEE Trans Ind Inf 14(7):3124–3131
Dahidah MSA, Konstantinou G, Agelidis VG (2015) A review of multilevel selective harmonic elimination PWM: formulations, solving algorithms, implementation and applications. IEEE Trans Power Electron 30(8):4091–4106
De León-Aldaco SE, Calleja H, Alquicira JA (2015) Metaheuristic optimization methods applied to power converters: a review. IEEE Trans Power Electron 30(12):6791–6803
Ahmed MM, Saad M, Marizan M, Muhammad A (2018) Selective harmonic elimination in inverters using bio-inspired intelligent algorithms for renewable energy conversion applications: a review. Renew Sustain Energy Rev 82:2235–2253
Routray A, Singh RK, Mahanty R (2020) Harmonic reduction in hybrid cascaded multilevel inverter using modified grey wolf optimization. IEEE Trans Ind Appl 56(2):1827–1838
Kumar Kar P, Priyadarshi A, Bhaskar Karanki S (2019) Selective harmonics elimination using whale optimisation algorithm for a single-phase-modified source switched multilevel inverter. IET Power Electron 12(8):1952–1963
Routray A, Singh RK, Mahanty R, Selective harmonic elimination in hybrid cascaded multilevel inverter using modified whale optimization. Int Trans Electr Energy Syst n/a(n/a):e12298
Haghdar K (2020) Optimal dc source influence on selective harmonic elimination in multilevel inverters using teaching-learning-based optimization. IEEE Trans Ind Electron 67(2):942–949
Siddique MD, Mekhilef S, Shah NM, Memon MA (2019) Optimal design of a new cascaded multilevel inverter topology with reduced switch count. IEEE Access 7:24498–24510
Nayyar A, Garg S, Gupta D, Khanna A (2018) Evolutionary computation theory and algorithms. In: Nayyar A, Le D-N, Nguyen NG (eds) Advances in swarm intelligence for optimizing problems in computer science, chapter 1. Chapman and Hall/CRC, New York, pp 1–26
Anand N, Dac-Nhuong L, Gia NN (2018) Advances in swarm intelligence for optimizing problems in computer science, 1st edn. Chapman and Hall/CRC, New York
Nayyar A, Nguyen NG (2018) Introduction to swarm intelligence. In: Nayyar A, Le D-N, Nguyen NG (eds) Advances in swarm intelligence for optimizing problems in computer science, chapter 3. Chapman and Hall/CRC, New York, pp 53–78
Kennedy J, Eberhart R (1995) Particle swarm optimization. In: Proceedings of ICNN’95-international conference on neural networks, vol 4, pp 1942–1948
Mirjalili S (2015) Moth-flame optimization algorithm: a novel nature-inspired heuristic paradigm. Knowl Based Syst 89:228–249
Ceylan O (2016) Harmonic elimination of multilevel inverters by moth-flame optimization algorithm. In: 2016 international symposium on industrial electronics (INDEL), Nov, pp 1–5
Seyedali M, Mohammad MS, Abdolreza H (2016) Multi-verse optimizer: a nature-inspired algorithm for global optimization. Neural Comput Appl 27(2):495–513
Kumar A, Suhag S (2017) Multiverse optimized fuzzy-PID controller with a derivative filter for load frequency control of multisource hydrothermal power system. Turk J Electr Eng Comput Sci 25:4187–4199
Sulaiman M, Ahmad S, Iqbal J, Khan A, Khan R (2019) Optimal operation of the hybrid electricity generation system using multiverse optimization algorithm. Comput Intell Neurosci 2019:6192980
Ilyas B, Kun X, Mouna C (2017) A new evolutionary neural networks based on intrusion detection systems using multiverse optimization. Appl Intell 48:2315–2327
Hossam F, Hassonah MA, Al-Zoubi MA, Mirjalili S, Aljarah I (2017) A multi-verse optimizer approach for feature selection and optimizing SVM parameters based on a robust system architecture. Neural Comput Appl 30:2355–2369
Seyedali M, Gandomi Amir H, Zahra MS, Shahrzad S, Hossam F, Mohammad MS (2017) Salp swarm algorithm: a bio-inspired optimizer for engineering design problems. Adv Eng Softw 114:163–191
Xing Z, Jia H (2019) Multilevel color image segmentation based on GLCM and improved salp swarm algorithm. IEEE Access 7:37672–37690
Gurav SB, Kulhalli KV, Desai VV (2020) Fuzzy integrated salp swarm algorithm-based RideNN for prostate cancer detection using histopathology images. Evol Intel. https://doi.org/10.1007/s12065-020-00402-y
Zhang J, Wang Z, Luo X (2018) Parameter estimation for soil water retention curve using the salp swarm algorithm. Water 10(6):815
Li E, Zhou J, Shi X, Jahed Armaghani D, Yu Z, Chen X, Huang P (2020) Developing a hybrid model of salp swarm algorithm-based support vector machine to predict the strength of fiber-reinforced cemented paste backfill. Eng Comput. https://doi.org/10.1007/s00366-020-01014-x
Figlu M, Suvendu R, Bodhisattva D, Banshidhar M, Swamy MNS (2020) An improved scheme for digital mammogram classification using weighted chaotic salp swarm algorithm-based kernel extreme learning machine. Appl Soft Comput 91:106266
Kandiri A, Golafshani EM, Behnood A (2020) Estimation of the compressive strength of concretes containing ground granulated blast furnace slag using hybridized multi-objective ANN and salp swarm algorithm. Construct Build Mater 248:118676
Saleh AS, Songfeng L, Mohamed AE, Ewees Ahmed A (2019) Improved multiobjective salp swarm optimization for virtual machine placement in cloud computing. Human Centric Comput Inf Sci 9(1):15
Rabeh A, Abdelkader A, Asghar HA, Seyedali M (2019) An efficient salp swarm-inspired algorithm for parameters identification of photovoltaic cell models. Energy Convers Manag 179:362–372
Qais MH, Hasanien HM, Alghuwainem S (2019) Enhanced salp swarm algorithm: application to variable speed wind generators. Eng Appl Artif Intell 80:82–96
Mohamed T, Hegazy R, Diab AA, Zaki A-DM (2018) A novel robust methodology based salp swarm algorithm for allocation and capacity of renewable distributed generators on distribution grids. Energies 11:2556
Hasanien HM, El-Fergany AA (2019) Salp swarm algorithm-based optimal load frequency control of hybrid renewable power systems with communication delay and excitation cross-coupling effect. Electr Power Syst Res 176:105938
Fathy A, Rezk H, Nassef AM (2019) Robust hydrogen-consumption-minimization strategy based salp swarm algorithm for energy management of fuel cell/supercapacitor/batteries in highly fluctuated load condition. Renew Energy 139(C):147–160
Abualigah L, Shehab M, Alshinwan M, Alabool H (2019) Salp swarm algorithm: a comprehensive survey. Neural Comput Appl. https://doi.org/10.1007/s00521-019-04629-4
Holland JH (1992) Professor of psychology and of electrical engineering and computer science John H. Holland, and Senior lecturer in human Resource Management Holland. In: Adaptation in natural and artificial systems: an introductory analysis with applications to biology, control, and artificial intelligence, Google-Books-ID: 5EgGaBkwvWcC. MIT Press
Storn R, Price K (1997) Differential evolution—a simple and efficient heuristic for global optimization over continuous spaces. J Global Optim 11(4):341–359
Hossein GA, Xin-She Y, Hossein AA (2013) Cuckoo search algorithm: a metaheuristic approach to solve structural optimization problems. Eng Comput 29(1):17–35
Khomfoi S, Tolbert L (2011) Multilevel power converters. In: Rashid MH (ed) Power electronics handbook; devices, circuits and applications, chapter 17, 3rd edn. Butterworth-Heinemann, Oxford, pp 455–487
Awais M, Raza MA, Ilyas H, Younus HB, Abbas T (2016) A novel problem formulation for selection of switching angles for minimization of total harmonic distortion in cascaded multilevel inverters. In: 2016 international conference on emerging technologies (ICET), Oct 2016, pp 1–6
Awais M, Ilyas H, Younus HB, Raza MA, Abbas T (2016) Optimal switching angles for minimization of total harmonic distortion in single phase cascaded multilevel inverters. In: 2016 19th international multi-topic conference (INMIC), Dec, pp 1–6
Seyedali M, Mohammad MS, Andrew L (2014) Grey wolf optimizer. Adv Eng Softw 69:46–61
Ssa source codes. http://www.alimirjalili.com/SourceCodes/SSA.zip. Accessed 10 Apr 2019
Mvo source codes. http://www.alimirjalili.com/SourceCodes/MVO.zip. Accessed 10 Apr 2019
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The author declares that there are no conflicts of interest.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Ceylan, O. Multi-verse optimization algorithm- and salp swarm optimization algorithm-based optimization of multilevel inverters. Neural Comput & Applic 33, 1935–1950 (2021). https://doi.org/10.1007/s00521-020-05062-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-020-05062-8