
Abstract
In this paper, we have discussed the application of the artificial neural networks in wind speed prediction. They will be used to predict the average monthly wind speed at three wind gauging stations in Gujarat, India. The wind speed data on an hourly basis are collected by NIWE (National Institute of Wind Energy) and located in the coastal areas of Western India, primarily Gujarat. The short-term and long-term data consisting of wind speeds have been considered for the period from 2015 to 2017. An artificial neural network is utilized for wind speed prediction using data measured from these stations for training and testing the given information. The data were studied using the nonlinear autoregressive models, NAR and NARX and the chaotic time series prediction models. The model is predicted using the historical data of the same station. The data are measured at a height of 100 m. The mean absolute percentage error (MAPE) and mean average error (MAE) concerning the predicted and measured wind speed were found to be 5.09 × 10−3, 5.33 × 10−3 and 2.9 × 10−3, respectively. The results of the ANN technique were compared with the Mackey–Glass equation-based time series prediction. Additionally, studies have been done on calculating the production and supply capacity of wind energy.
Similar content being viewed by others
Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
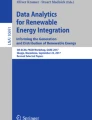
Due to increasing demand for energy nowadays in different parts of the country India, the search is on for adding new and renewable resources to the mainstream. Wind energy is rapidly developing as a major supplier of energy generation as it is a very clean source of energy, and the wind plant functioning costs are very low [1]. As the technology is advancing at a rapid rate, the wind energy is fast catching up to the current energy generation technologies and is also sometimes comparable in case of investment cost [2]. The renewable sector has seen an increase in penetration of solar and wind energy nowadays primarily in India where there is a hiatus between the supply and demand [3]. India was ranked fourth in the third week of December 2016 in the Global Wind Power Installed Capacity Index among the global nations in its collectively installed wind generation capacity of 25,088 MW behind the USA, Germany and China which shows an improvement in its prior ranking. The cumulative installed wind power generation capacity of India was 25,088 MW [4]. The aggregate wind generation capacity of China was at the peak of 168,690 MW, while the capacity for USA and Germany was 82,183 MW and 50,019 MW for the year 2016. In 2016, globally more than 54 GW of wind power plants were instated among whom nine power plants have a capacity exceeding 10 GW and rest 29 countries have spanned the 1 GW target. The cumulative capacity of these plants escalated by 12.6% reaching to 490 GW [4]. The current demand for global wind energy is approximately equal to 5%. The wind power of Asia as compared to various continents like Europe lies in proximity and soon it will overtake the installed capacity of Europe in 2015 and soon becoming the highest capacity continent [4]. The wind progression is high in the case of Eastern Europe and Latin America especially countries like Chile. The share of China in wind installations among the world was seen as 43%, while that of Denmark was seen as 38% in 2016 where it is forecasted to get 100% power from wind energy by 2050 [4]. The total number of wind turbines which are expected to be around at the end of 2017 is approximately 350,000 conferring to a report by global wind energy council [4]. The world is set to develop new renewable sources by the end of 2022 which would then force Indian energy industry to assimilate more energy from wind turbines approximately double and approximately 15 times the solar energy need to be increased from the levels present in 2016.
In 2017, India has reached the installed capacity of 32 GW and is targeted to reach 60 GW until 2022 [5]. India has managed to reach an all-round capacity of 340 GW, with approximately 60 GW of which would come from renewables as on July 2017. The wind contributed at approximately 61% while solar comparatively contributed a lesser percentage, i.e., 19%. The small hydroprojects capacity summed up to 45 GW as on Feb 2017 [6]. The installed renewable capacity statistics are shown in Fig. 1.

Renewable currently installed capacity vs target 2022
The targets that have been set by MNRE is to upscale the renewables to approximately 174 GW by the end of 2022 including 105 GW solar, 60 GW wind, 10 GW biogas and 6 GW from small hydroplants [7]. Till the end of Feb 2017, the installed capacity was set as 29 GW which includes states like Maharashtra, Tamil Nadu, Gujarat, Rajasthan, Karnataka, Andhra Pradesh and Madhya Pradesh where the wind power contributes to 14% of the installed capacity and is forecasted to produce 60 GW from wind by 2022 [8]. One such installation is shown in Fig. 2.

Wind farm installation in Gujarat (Source—Ministry of New and Renewable Energy, India)
According to Ministry of New and Renewable Energy (MNRE), of about 50,018 MW of installed renewable power in India, over 55% is wind power, exceeding its 4000 MW target and the wind tariff dropped to Rs 3.46 kWh [8].
Hence to overcome this surplus demand, wind turbines have been installed in various parts of the country primarily Gujarat which is a state witnessing a marked increase in wind energy penetration. Gujarat has been characterized by a long coastline which leads to an approximately wind potential of 35,000 MW [8]. It has recently seen high echelons in wind power generation owing to the high wind speeds on its coastal area and increasing generation as depicted in Fig. 3. Recently in June 2017, the wind generation capacity reached a record of 3460 MW [9].

Wind energy potential in Gujarat state (Source—National Renewable Energy Laboratory (NREL), Colorado)
Wind-monitoring stations have been installed in wind turbines present at these sites which will give the monitored data to the operator. This monitored data can be used for several aspects of research.
In [10], the status of wind energy in India and neighboring countries, China and Pakistan, was discussed. It was seen that China is having advantages over India due to the presence of renewable laws, India with 17% renewable participation needs to rival with China in wind generation portfolio, while Pakistan is still seen as lagging behind in wind energy participation.
In [11], the site assessment parameter for wind turbines in Gujarat was discussed. A diagnostic outline was established using GIS in this article with fuzzy logic to assess the appropriate spot for turbines for optimal energy production. It gives the idea that the wind turbines are suitable for development along the western coastline of Gujarat. Hence, the future choice of site for the wind turbine can be assessed to be of use to energy engineers.
In [12], the study of wind energy potential for selected six locations present in the state of Gujarat utilizing 19 year past data from 1995 to 2013 which has been exposed to Weibull distribution was conducted.
The results showed that at locations Okha and Motisindh, the yearly wind speed possess an average of 7.1 m/s with maximum power density as 280 W/m2, while Sanodar has a lowest yearly wind speed of 3.8 m/s with 54 W/m2 maximum power density.
2 Wind speed prediction
As the energy harvesting from a wind turbine is witnessing an increase recently, the need for prediction of wind speed is also arising due to the sporadic nature of the wind. Hence, datasets from around the world are analyzed to get a better study.
Rasit Ata [13] analyzed the several types of usage of artificial neural networks for feasibility in wind energy systems mainly for prediction. He analyzed in detail the different prediction methodologies for wind speed prediction on the very short-term, short-term and long-term basis along with other applications. It was found from the review that the most commonly used neural model was multilayer perceptron network (MLP). The best training algorithm was found to be Levendberg–Marquardt and the best optimization algorithms were particle swarm optimization (PSO) and genetic algorithms (GA).
Ramasamy et al. [14] prepared an artificial neural network (ANN) model for wind speed prediction in the mountainous regions of Hamirpur, Himachal Pradesh in India. He utilized temperature, solar radiation, air pressure and wind speed as inputs to the neural network for training, and the model was validated by testing on a different location. It can be concluded that the neural model was successful in capturing the variability of the location; however, additional techniques to improve the efficiency of the model could be utilized.
Meng et al. [15] utilized a hybrid model of wavelet packet decomposition, crisscross optimization algorithm and artificial neural networks (WPD-CSO-NN) for wind speed prediction at a wind observation station of Rotterdam, Netherlands. The results compared the proposed model to two other hybrid combinations with different optimization algorithms like Particle Swarm optimization and backpropagation where the WPD-CSO-NN model outperformed the other two hybrid models; however, the processing becomes slow.
Wang et al. [16] proposed a hybrid model of an ensemble empirical mode decomposition (EEMD) of wind speed data and a neural network composed of a combination of backpropagation (BP) and genetic algorithm (GA) setup. A case study was performed for a wind farm in Inner Mongolia, China. The results showed its superiority over the traditional approach of GA–BP and are suitable for the ultra-short-term and short-term forecasting; however, the combination increases the computational time.
Mishra and Dash [17] proposed a pseudo-inverse Legendre neural network (PILNNR) along with a radial basis function (RBF) embedded in the hidden layer for short-term wind power prediction. Weight optimization was carried out by a metaheuristic firefly (FF) algorithm, and the model was compared with two other hybrid prediction models, i.e., pseudo-inverse radial basis function (PIRBFNN-FF) and tanh function (PILNNT-FF) where the algorithm proposed outperformed. A case study was performed for the wind farms of Wyoming and California, USA, and Sotavento, Spain. The model was successful in performing short-term prediction of wind speeds in different seasons; however, the accuracy of the system proposed was compromised which needs to be further improved.
Mert et al. [18] proposed an ANN-based stepwise multi-linear regression (SMLR) technique to evaluate the power profile of a wind turbine directly. From each parameter of daily sub-data, SMLR was implemented to determine the appropriate input for ANN and corresponding outputs were computed adapted to changing conditions like daily mean air temperature, pressure, wind speed, and direction, however, the functioning of ANN model for seasonal data still needs to be reviewed.
Fazelpour et al. [19] proposed several techniques of predicting wind speed for short durations based on four neural network models namely ANN-RBF, adaptive neuro-fuzzy inference system (ANFIS) and hybrids of ANN with optimization algorithms GA and PSO at a location selected in Tehran, Iran. The results indicated that the ANN-GA model was found to be having greater efficiency in capturing the fluctuation in wind profile; however, this method resulted in a slow convergence of the simulation setup which can be improved by using other hybrid combinations.
Cadenas et al. [20] proposed a long-term wind speed prediction method based on a nonlinear autoregressive exogenous (NARX) model for La Mata, Oaxaca, Mexico. The results showed that the NARX method was efficient and superior to the NAR method and persistence method in the modeling of the wind speed data and its accurate prediction; however, the results were not as consistent for short-term wind speed prediction.
Hayashi and Nag [21] proposed a Jacobian matrix estimation method based on deterministic chaos for wind speed prediction on wind turbine surrounding areas near Aomori, Japan. The results showed that by investigating the change in error rate with respect to Aomori, it is possible to install appropriate observatories in surrounding areas to compute the least error rate on which the prediction and maximum power output is attained; however, this may lead to a proliferation in expense to the state.
As can be observed from the literature review, various models have been utilized to forecast the wind speed in which many models were designed utilizing the neural networks and hybrids of neural networks with other methods such as genetic algorithms, fuzzy logic, and other methods. However, the prediction of wind time series in the case of deterministic chaos still needs to be surveyed further. The stochastic characteristic of noise is difficult to analyze. The fuzzy logic methods when used for wind speed prediction lack precision. The artificial neural network proves as a self-adapting method, being highly efficient in the prediction of wind speeds; however, it still faces some issues which include the diversity of training models required for their operation, slow convergence and some over fitting issues. Hence, it deems necessary a comparison of the neural model with other models which could act as a precursor to the discussed method.
In the need to search for contemporary models which can predict wind speeds, this article sets out to create step ahead prediction models using the nonlinear autoregressive networks (NAR) and the exogenous input neural model (NARX). The NAR network works on the output variables fed back to the input, while the NARX network includes an exogenous input as atmospheric parameter addition. Chaos theory and approaches are used to discuss the wind speed prediction problem which is an emerging prediction technique. The comparison between the chaotic and neural models showed the best of both the algorithms in their prediction accuracy; however, the ANN method was seen to supersede the former method. The accuracy of wind power prediction is a crucial factor for assessment of the economy and security when the grid is fed by wind power. Improper selection of prediction method may lead to delays in operation and large errors in the wind production systems.
3 Methods
3.1 Artificial neural networks
Artificial neural networks (ANN) have been an emerging field which has been now extensively used by researchers in every field of study including engineering and medicine. It is useful in designing systems that are adaptive and predictive. It works on input–output interaction. A neural network tries to achieve the given targets by modifying the synapses/weights of the hidden layer which modifies according to what has been learned by the network earlier from the past interaction history of input and output [22,23,24,25].
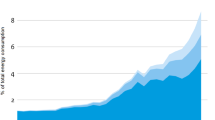
A neural network can be trained just like a human brain where it learns from the previous interactions. It can be used to solve problems that were deemed very complex to solve analytically. A neuron forms the central element of an ANN. It entails the input layer, hidden and an output layer.
A distinct nerve cell can be articulated by the subsequent mathematical formula:
3.1.1 Nonlinear autoregressive network
A NAR (nonlinear autoregressive) model comprises an output that is fed back to the input layer through feedback associations consisting of one-time delay as shown in Fig. 4. It is also denoted as an input–output recurrent model and constitutes one-time step. The external input represents the current state of the variable. It is a recursive approach where the output is reused as input for the time length of forecast [26,27,28].

Nonlinear autoregressive model
The time series based on the NAR model is depicted by:
This time series equation was modified later to form the given below equation
3.1.2 Nonlinear autoregressive network with exogenous input
The output is fed back as an input for this type of nonlinear autoregressive network, but additional features are added to the input matrix which may depict other parameters such as other environmental features which may affect the prediction quality and should be included to counter this effect.
During forward propagation, some additional factors, such as the temperature and pressure, are included in the study as the given measurement setup is capable of delivering these features only as shown in Fig. 5.

Nonlinear autoregressive model with external parameters
The hidden layer, the inner information dispensation layer of the neural network, is intended for information conversion, analysis and judgment [29, 30].
3.2 Mackey–Glass chaotic equation
A chaotic system denotes the fluctuations of a nonlinear structure’s bounded output expressing a chaotic behavior which reacts well to initial conditions. It possesses a deterministic property where there exists a restricted correlation in the system readings [31, 32]. Hence, Mackey and Glass [33] devised a nonlinear time delay differential equation in order to model physiological systems. The sequence is depicted in equation
For ζ > 17, the series exhibits chaotic behavior.
Any differences in initial conditions could lead to diverging conclusions. For reliability, a chaotic time series is predicted by utilizing the fuzzy logic systems which inhibit the nonstationary nature of data to affect the predicting power of the system.
Hence, a proper control is obtained over the varying wind data. The system is studied using a combination of ANN and fuzzy techniques (ANFIS) network which can create rules so as to reduce the errors in prediction.
An ANFIS network will be constructed which can predict the future values [34] of the wind speed, i.e., y(t + 6) from the preceding values of the chaotic wind speed time series, i.e., y(t), y(t − 6) and y(t − 12) as shown in Fig. 6.

Neural architecture for chaotic prediction
3.2.1 Mackey–Glass time series
The Mackey–Glass time series [35] is represented by the subsequent equation:
and its discrete form is denoted as
If properly selected embedding dimension m and delay time to, the wind power time series {xk: k = 1, 2…, n} can be reconstructed in which, N = n − (m − 1) denotes the extent of the reformed wind time series arrangement. Hence for construction of phase space, there should be a proper selection of delay time interval and the embedded dimensions. Hence, these parameters optimize the precision behavior of the model parameters.
3.2.2 Chaotic time series for prediction
A single-stage prediction method is utilized for forecasting the chaotic time series for wind speeds as shown in Fig. 7. Historical values of wind speed are utilized to predict wind data on an hourly basis for which a fuzzy logic technique is exercised. The neural network architecture is then used to train the deduced rule set and utilized to procure the predicted time series [36]. The steps of formation of a forecasted time series are shown in the flowchart shown in Fig. 8.

Mackey–Glass time series for wind data

Flowchart depicting steps for chaotic series prediction
4 Performance metrics
There are some standard performance metrics which are used to evaluate the standard of all the training algorithms used for prediction and can be used for performance analysis. These consist of the mean squared error (MSE), root-mean-squared error (RMSE), mean absolute percentage error (MAPE) and mean absolute deviation (MAD) [37, 38].
Mean square error is the average of the square of deviations between the actual and predicted wind speed values and can be stated as:
RMSE formula is the square root of the average of squared errors between the actual and predicted wind speeds and useful for larger errors and is more accurate than MSE. It can be stated as follows
The cancelation of positive and negative errors is permeated by the mean absolute percentage error (MAPE) which is the aggregate of the time series of absolute errors between model output data pairs.
The MAPE criterion is explained as:
where \( P_{j}^{\text{actual}} \) represents the actual and \( P_{j}^{\text{predicted}} \) represents the predicted wind power.
Mean absolute deviation (MAD) is able to permeate the zero denominator and other scale problems that are prevalent in MAPE hence is less sensitive to the errors as contrasted to the standard deviation.
5 Results
The data that are considered for the study were monthly data of wind data from the wind-monitoring systems installed by National Institute of Wind Energy (NIWE), India, from the period 2015–2017 [39]. For both the models, the complete wind data were divided into three parts: training, validation and test data. The training set comprises of 504 observations (i.e., 70%) and utilized for modeling. The parameters for training the neural network models are discussed in Table 1.
The validation set comprises of 108 observations to postulate the predicting capability of the predicting models for future prediction. Before the data are ready for use in the neural network, it was preprocessed so that it is a better fit for activation function’s range. Hence, the data were normalized in the range of − 1 to + 1. The algorithm can function properly leading to a uniformity in data analysis. The forecasted values are based on past observations of the series itself and also any external variables as input.
In the neural network architecture, the number of hidden layers was taken as 3, the delay was taken as 1 and a single output. The training algorithm used was the Levendberg–Marquadt algorithm. Weights are automatically adjusted by the feedback sent from the output to the input. The operation of the network was improved for the training set over the validation set so that the data does not overfit the model.
The network presenting the best generalization ability is chosen for future prediction of time series of wind data. For achieving the desired results, MATLAB 2015 which was utilized for neural and chaotic wind simulation.
5.1 NAR (nonlinear autoregressive model)
The input wind speed time series is fed to the NAR network and the corresponding predicted wind speeds are plotted with respect to the actual time series and a close approximation is observed between input and output series as shown in Fig. 9. The subsequent mean square errors and regression values for the trained NAR model, i.e., training, testing and validation are shown in Table 2.

Plot of actual speed vs predicted wind speed for NAR model
5.2 NARX (NAR model with exogenous inputs)
The input wind speed time series along with additional parameters like temperature and pressure is fed to the NARX network, and the corresponding predicted wind speeds are plotted with respect to the actual time series and a close approximation is observed between input and output series as shown in Fig. 10a. The time response plot for the trained model which depicts minimal errors on all three sets which are shown in Fig. 10b, and its prediction accuracy is shown in Fig. 10c. It can be observed that the lowest validation error happens at epoch number 21 which yields the lowest mean square value, i.e., 0.00,427 after which the training process halts. The subsequent mean square errors and regression values for the trained NARX model are shown in Table 3.

a Plot of actual speed vs predicted wind speed for NARX model. b Time response plot, c prediction accuracy of neural network
5.3 Chaotic wind speed prediction
A predicted wind speed time series is formed from previous values of the wind speeds using ANFIS which can predict y(t + 6) values from preceding values of wind speeds, i.e., y(t), y(t − 6), y(t − 12) and y(t − 18). From time sample of wind speeds for selected location from 101 to 524, where initial points are not considered in order to avoid transients. We have collected the data for which 223 data points are utilized for training, while rest of the wind speed data is used for testing and validation. Initially, an FIS matrix using the Sugeno model is generated utilizing the training data which is shown in Fig. 11a. There are 16 rules for the FIS matrix defined where of fitting parameters are 104 where 80 are linear parameter while rest are nonlinear parameters.

Chaotic model. a Generated FIS matrix, b error curves, c plot of actual speed vs predicted wind speed by ANFIS, d prediction errors between actual and forecast by ANFIS
Error curves for both training and checking data are shown in Fig. 11b. The training error exceeds the checking error due to the utilization of ANFIS learning.
The actual wind time series and the series predicted by ANFIS network are compared with each other, and the results are displayed in Fig. 11c. The prediction errors for wind data using ANFIS are shown in Fig. 11d where the data are trained for 10 epochs. After 10 epochs, the mean square error of training converges down to the value 2.5 × 10−3. The selected ANFIS parameters for prediction of chaotic time series are discussed in Table 4.
6 Comparison
All the three prediction techniques are compared with each other in Fig. 12. It is seen that the NARX prediction is having less error than any of the other discussed models.

Plot of comparison of NAR, NARX and chaotic prediction models with respect to time axis
Several simulations with different values of delay variables and hidden layer were chosen and on a hit and trial method, it was found that the configurations with three hidden layers were the most appropriate and with the least error and giving the best performance plot as per the output. However, further configurations could yield a different result. NAR network was selected for the study using the wind data from the site and after training the normalized data; the difference between the actual and predicted time series was plotted with respect to the time axis in Fig. 12. Similarly, after inclusion of variables like pressure and temperature, the NARX was used for prediction of wind speeds at the same site. The mean square error for training the model was found to be less than the NAR model. The difference between the actual and predicted wind speeds was again plotted on the same time axis to permit comparison. The wind speed was further forecasted by the chaotic method using the Mackey–Glass equation and utilizing the ANFIS network, and the difference error was again plotted on the same time axis. It can be observed that the fluctuations between the actual and predicted wind speeds were least in case of NARX. There are occasional peaks where the predicted value deviates from the true value; however, this could be due to a sudden change in external variables and the average error in wind speed remains between 0.1 and 0.2 m/s. The NAR model creates further deviations and is less efficient than NARX method in predicting the wind speed. The average error remains within approx. 0.3–0.4 m/s. The chaotic prediction sequence of data was the least effective in capturing the eccentricity of wind speeds; however, the average error remains between 0.3 and 0.5 m/s; however, training the ANFIS model for a higher number of epochs and noise removal in wind data could lead to improved results.
The wind power error distribution of the NAR network has been discussed in Fig. 13. The error histogram as observed in Fig. 13 is centered uniformly across the zero error line; however, negative values of error exceed the positive ones hence mean absolute percentage error could be a better alternative for performance analysis.

Error histogram for nonlinear autoregressive model
The actual and forecasted wind energy models have been compared with each other along with the rated power of wind turbine and are discussed in Fig. 14. It depicts the comparison of power production of the wind turbine. The power output of the wind turbine is computed for the particular site according to the actual and predicted wind speeds, and the actual and forecasted energy generation is shown in the figure where it is compared with the rated power of the turbine.

Plot of actual and forecasted wind energy production and error with respect to the rated power of the turbine
It is observed that the wind turbine generated 0.3 MW of power at the site compared to the 1.5 MW wind turbine installed. This leads to an efficiency of 20% which is low. The error generation plot is also shown for the difference between the actual and forecasted values.
The different prediction techniques are then viewed with respect to each other in Fig. 15 concerning their mean square errors and root-mean-square errors.

Comparison XY plot for prediction errors for the three selected models
The mean square errors and root-mean-square errors are plotted with respect to each other for the chosen three models namely NAR, NARX and chaotic prediction in the figure. It is observed that the mean square error was least in case of NARX, i.e., 0.00,509 and RMSE of 0.0714 giving better prediction results than NAR and chaotic models.
An assessment of comparison of results of the findings with past findings is discussed in Table 5.
It is verified from the results shown in [20] discussed in Table 5 that NARX resulted in better performance than the NAR method as demonstrated in this paper and the ANFIS results shown in [19] approximated the ANFIS-based chaotic prediction results calculated in this paper. It is observed that further hybrid techniques discussed in other references can be used to further increase the performance accuracy of the neural network models.
Table 6 shows the average energy generation values for the wind turbine on a monthly basis. The energy production capacity of a wind turbine is calculated based on the difference in the actual and predicted wind speed and is discussed in the table. It is inferred that it is dependent on various environmental parameters like wind direction, wind speed, temperature, pressure as well as the accuracy of the neural or chaotic model considered for the given study.
It is observed that the generation is maximum in January due to the presence of high-speed seasonal winds off the coast of Gujarat and the least generation is observed in the month of October which can be substituted by alternate energy resources, hence vouching for its suitability on the terrain in Gujarat. Based on the actual and forecasted wind speed values computed from the neural models, the error difference can be noted in Table 7.
The error difference varies throughout the year based on the intermittency in wind behavior leading to deviations in wind speeds leading to the greater error. These errors need to be studied through different performance metrics discussed in Sect. 4 as this is crucial to plan the establishment of wind energy generation centers. The mean square errors for the trained neural models are least in the case of December leading to better prediction accuracy of the trained model. Similarly, other metrics could be followed based on the application. The wind energy that is produced by the wind turbine or on a larger scale, a wind farm may be studied by all the three techniques based on the above-mentioned four performance metrics.
7 Conclusions
This paper discusses the relative assessment between ANN networks (NAR and NARX) and chaotic wind speed prediction models on the basis of their performance in predicting wind speed taken from a measurement setup installed at Agiyali, Gujarat. The readings were considered for the period from 2015 to 2017. The results from both the cases were compared with each other. The prediction results proved taking into consideration the mean squared errors due to each methodology, and it was concluded that the neural networks outperform the chaotic models in wind prediction problem. Some external inputs like temperature and wind direction were also assimilated in the given models, and it was seen that the neural model was still effective in managing its weights based on these external inputs. Further study can include some more input variables apart from these variables and can also study the impact of high wind speeds at different heights.
References
Twidell J, Weir T (2015) Renewable energy resources. Routledge, Abingdon
Gosens J, Hedenus F, Sandén BA (2017) Faster market growth of wind and PV in late adopters due to global experience build-up. Energy 131:267–278
Bhattacharyya SC (2015) Influence of India’s transformation on residential energy demand. Appl Energy 143:228–237
Global Wind Energy Council (2017) Global wind energy outlook 2016. Glob Wind Energy Counc pp 1–60
IEA IEA (2015) India Energy Outlook. World Energy Outlook Spec Rep 1–191. https://www.iea.org/publications/freepublications/publication/africa-energy-outlook.html
(2017) All India installed capacity of utility power stations. www.cea.nic.in. Accessed 15 Oct 2017
India DAHD (2017) (India) Annual Report 2016–17. Minist New Renew Energy. https://doi.org/10.1017/CBO9781107415324.004
MNRE (2017) Annual report 2016–17
Times News Network (2017) Record level of wind power produced in Gujarat on higher capacity. Energy World, Economic Times, Ahmedabad. https://energy.economictimes.indiatimes.com/news/power/record-level-of-wind-power-produced-in-gujarat/59262553. Accessed 16 Oct 2017
Ahmed S, Mahmood A, Hasan A et al (2016) A comparative review of China, India and Pakistan renewable energy sectors and sharing opportunities. Renew Sustain Energy Rev 57:216–225
Borah K, Souvnik R, Harinarayana T (2013) Optimization in site selection of wind turbine for energy using fuzzy logic system and GIS—a case study for Gujarat. Open J Optim 2:116–122. https://doi.org/10.4236/ojop.2013.24015
Nagababu G, Bavishi D, Kachhwaha SS, Savsani V (2015) Evaluation of wind resource in selected locations in Gujarat. Energy Procedia pp 212–219
Ata R (2015) Artificial neural networks applications in wind energy systems: a review. Renew Sustain Energy Rev 49:534–562. https://doi.org/10.1016/j.rser.2015.04.166
Ramasamy P, Chandel SS, Yadav AK (2015) Wind speed prediction in the mountainous region of India using an artificial neural network model. Renew Energy 80:338–347. https://doi.org/10.1016/j.renene.2015.02.034
Meng A, Ge J, Yin H, Chen S (2016) Wind speed forecasting based on wavelet packet decomposition and artificial neural networks trained by crisscross optimization algorithm. Energy Convers Manag 114:75–88. https://doi.org/10.1016/j.enconman.2016.02.013
Wang S, Zhang N, Wu L, Wang Y (2016) Wind speed forecasting based on the hybrid ensemble empirical mode decomposition and GA-BP neural network method. Renew Energy 94:629–636. https://doi.org/10.1016/j.renene.2016.03.103
Mishra SP, Dash PK (2017) Short-term prediction of wind power using a hybrid pseudo-inverse Legendre neural network and adaptive firefly algorithm. Neural Comput Appl. https://doi.org/10.1007/s00521-017-3185-3
Mert İ, Karakuş C, Üneş F (2016) Estimating the energy production of the wind turbine using artificial neural network. Neural Comput Appl 27:1231–1244. https://doi.org/10.1007/s00521-015-1921-0
Fazelpour F, Tarashkar N, Rosen MA (2016) Short-term wind speed forecasting using artificial neural networks for Tehran. Iran. Int J Energy Environ Eng 7:377–390. https://doi.org/10.1007/s40095-016-0220-6
Cadenas E, Rivera W, Campos-Amezcua R, Cadenas R (2016) Wind speed forecasting using the NARX model, case: La Mata, Oaxaca, México. Neural Comput Appl 27:2417–2428. https://doi.org/10.1007/s00521-015-2012-y
Hayashi M, Nagasaka K (2014) Wind speed prediction and determination of wind power output with multi-area weather data by deterministic chaos. In: 2014 international conference on advanced mechatronic systems (ICAMechS), IEEE, pp 192–197
Hill T, Marquez L, O’Connor M, Remus W (1994) Artificial neural network models for forecasting and decision making. Int J Forecast 10:5–15. https://doi.org/10.1016/0169-2070(94)90045-0
Jain AK, Mao J (1996) Artificial Neural Network: a Tutorial. Communications 29:31–44. https://doi.org/10.1109/2.485891
Lee K, Cha Y, Park J (1992) Short-term load forecasting using an artificial neural network. Power Syst IEEE Trans. 7:124–132. https://doi.org/10.1109/59.141695
Yao X (1999) Evolving artificial neural networks. Proc IEEE 87:1423–1447. https://doi.org/10.1109/5.784219
Chow TWS, Leung C-T (1996) Nonlinear autoregressive integrated neural network model for short-term load forecasting. IEE Proc. - Gener. Transm. Distrib. 143:500
Benmouiza K, Cheknane A (2016) Small-scale solar radiation forecasting using ARMA and nonlinear autoregressive neural network models. Theor Appl Climatol 124:945–958. https://doi.org/10.1007/s00704-015-1469-z
Cai Y (2005) A forecasting procedure for nonlinear autoregressive time series models. J Forecast 24:335–351. https://doi.org/10.1002/for.959
Connor JT, Martin RD, Atlas LE (1994) Recurrent neural networks and robust time series prediction. IEEE Trans Neural Networks 5:240–254
Menezes JMP, Barreto GA (2008) Long-term time series prediction with the NARX network: an empirical evaluation. In Neurocomputing pp 3335–3343
Rasband SN (1990) Chaotic dynamics of nonlinear systems. Wiley, New York
Doyne Farmer J (1982) Chaotic attractors of an infinite-dimensional dynamical system. Phys D Nonlinear Phenom 4:366–393. https://doi.org/10.1016/0167-2789(82)90042-2
Mackey M, Glass L (1977) Oscillation and chaos in physiological control systems. Science 80-(197):287–289. https://doi.org/10.1126/science.267326
Soto J, Castillo O, Soria J (2010) Chaotic time series prediction using ensembles of ANFIS. In: Castillo O, Kacprzyk J, Pedrycz W (eds) Soft computing for intelligent control and mobile robotics. Studies in computational intelligence, vol 318. Springer, Berlin
Zhao J, Li Y, Yu X, Zhang X (2014) Levenberg-marquardt algorithm for mackey-glass chaotic time series prediction. Discret Dyn Nat Soc. https://doi.org/10.1155/2014/193758
Alsing PM, Gavrielides A, Kovanis V (1994) Using neural networks for controlling chaos. Phys Rev E 49:1225–1231. https://doi.org/10.1103/PhysRevE.49.1225
Li G, Shi J (2010) On comparing three artificial neural networks for wind speed forecasting. Appl Energy 87:2313–2320
Paliwal M, Kumar UA (2009) Neural networks and statistical techniques: a review of applications. Expert Syst Appl 36:2–17
Acknowledgements
The wind profile data were collected by NIWE, as part of the Government of India Wind Monitoring Project, which was sponsored by MNRE (Ministry of New and Renewable Energy). The involvement of the NIWE (National Institute of Wind Energy) is acknowledged. [The acquisition of the wind profile data was carried out by NIWE using the meteorological instruments and was funded by Government of India.]
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Rights and permissions
About this article

Cite this article
Jamil, M., Zeeshan, M. A comparative analysis of ANN and chaotic approach-based wind speed prediction in India. Neural Comput & Applic 31, 6807–6819 (2019). https://doi.org/10.1007/s00521-018-3513-2
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-018-3513-2