
Abstract
This paper proposes a novel-efficient evolutionary-based multi-objective optimization (MOO) approaches for solving the optimal power flow (OPF) problem using the concept of incremental load flow model based on sensitivities and some heuristics. This paper is useful in robust decision-making for the system operator. The main disadvantage of meta-heuristic-based MOO approach is computationally burdensome. The motivation of this paper is to overcome this drawback. By using the proposed efficient MOO approach, the number of load flows to be performed is reduced substantially, resulting to the solution speed up. Here, three objective functions, i.e., generator fuel cost minimization, loss minimization, and L index minimization are considered. The proposed approach can effectively handle the complex non-linearities, discontinuities, discrete variables, and multiple objectives. The potential and suitability of the proposed efficient MOO approach is tested on the IEEE 30 bus system. The results obtained with the proposed efficient MOO approach are also compared with the meta-heuristic-based non-dominated sorting genetic algorithm-2 (NSGA-II) technique. In this paper, the proposed efficient MOO approach is implemented using the differential evolutionary (DE) algorithm. However, it is a generic one and can be implemented with any type of evolutionary algorithm.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Optimal power flow (OPF) refers to the calculation of optimal settings for electrical control variables in power system control that are a trade-off between the economy and system security. The basic task is to determine a set of optimal system states within a region defined by the operating constraints like branch flow and voltage limits while optimizing an objective function such as cost function within this region. Modern power systems are very large in size and may be monitored and controlled in real time using energy management system (EMS) functions. The common shortcomings of conventional OPF include non-convergence due to infeasibility. Other problems involve discrete vs. continuous control, local minima, and problems with equivalents. Therefore, it is imperative to develop the optimization approaches that are able to overcome these drawbacks. Recently, meta-heuristic/evolutionary optimization techniques have been used to overcome the drawbacks of conventional optimization methods. Various evolutionary algorithms and their variants have been proposed in the literature for solving the OPF problem, e.g., genetic algorithm (GA) [1], enhanced GA (EGA) [2, 3], particle swarm optimization (PSO) [4], improved evolutionary programming (IEP) [5], differential evolutionary (DE) algorithm [6], bacterial foraging algorithm (BFA) [7], gravitational search algorithm (GSA) [8], simulated annealing (SA) algorithm [9], biogeography-based optimization (BBO) [10], and tabu search (TS) algorithm [11]. On the other hand, the main drawback of meta-heuristic-based OPF is the excessive execution time, i.e., computationally burdensome, because of the large number of load flows needed in the solution process. Hence, it is important to develop an efficient optimization algorithm that will overcome this drawback. References [12] and [13] have made an attempt in this regard. To make the OPF more attractive to the industry and users and to guide the decision-making of power system operators, the OPF should have the following features:
-
OPF solution should not be sensitive to the starting point selection.
-
Changes in solution point should be consistent with changes in the operating constraints.
-
OPF programs must be user-friendly.
-
Complexity of OPF problem must be reduced.
For solving the MOO-based OPF, there are many techniques available in the literature. In reference [14], the MOO problem can be converted into a single-objective optimization and then solved by using the ε constraint method. Reference [15] proposes an approach to minimize the generation cost and use environmental impact index as a constraint. The difficulty of this approach is to choose a suitable upper bound for the environmental impact index. Most of the MOO methods in the literature use the evolutionary-based algorithms and their variants. In [16], a strength Pareto evolutionary algorithm (SPEA) is developed to solve the problem as a true MOO problem with competing and non-commensurable objectives. In reference [17], a multi-objective PSO (MOPSO) algorithm is proposed for solving the OPF problem. A multi-objective OPF technique using PSO considering two conflicting objectives, i.e., minimization of generation cost, and environmental pollution simultaneously is proposed in [18]. Reference [19] proposes an improved PSO (IPSO) for solving the MO-OPF problem. References [20,21,22] propose a multi-objective DE (MO-DE)-based algorithm to solve the OPF problem. Reference [23] presents the review of recent advancements in the OPF problem since 2010 and also identifies the challenges that are required to adapt to the transition toward smarter electrical grids, and indicates the ways to address these challenges. In [24], an efficient and simple nature-inspired search based on differential search technique has been presented to solve the OPF problem. An adaptive group search optimization algorithm for the solution of OPF problem is proposed in [25]. In [26], a new backtracking search optimization technique is proposed for solving the OPF problem. Reference [27] proposes an improved colliding bodies optimization algorithm for solving the OPF problem efficiently.
Reference [28] proposes a bi-objective DC-OPF model by minimizing the network losses and generation costs and they can be converted into a single objective model via the weighted summation approach. An artificial bee colony algorithm with dynamic population which synergizes the idea of extended life cycle evolving model to balance the exploration and exploitation tradeoff is proposed in [29]. Reference [30] proposes a modified multi-objective evolutionary algorithm-based decomposition method to solve the OPF problem with multiple and competing objectives, i.e., fuel cost, emissions, voltage magnitude deviations, and power losses. A multi-objective multi-population ant colony optimization for continuous domain to solve the economic and emission dispatch problem considering power system security is proposed in reference [31]. Reference [32] proposes an improved-strength Pareto evolutionary algorithm to solve the MO-OPF problem considering the fuel cost and emission objectives. An improved artificial bee colony algorithm to solve the OPF problem in electric power grids is proposed in [33]. Reference [34] proposes a new multi-objective day-ahead market clearing mechanism with demand response offers, considering realistic voltage-dependent load modeling. Reference [35] proposes a biogeography-based optimization algorithm for solving various constrained economic dispatch problems combined with economic emission aspects in power system. An archive-based multi-objective artificial bee colony optimization algorithm in which an external archive is used to preserve the current obtained non-dominated best solutions is proposed in [36]. An improved multi-objective PSO based on Pareto-optimal solutions is proposed in [37] to maximize the amount of the final product while reducing the amount of the by-product in batch process.
This paper selects the differential evolution (DE) algorithm to implement the proposed efficient approaches. It proposes a novel efficient evolutionary-based approach for solving the MOO-based OPF problem using the concept of incremental power flow model based on sensitivities and some heuristics. The proposed efficient approach first finds out the optimum values of each objective function, one at a time, ignoring the other. In the process, with these optimized solutions, we also find out the worse values of the other objective functions. Then, we start from one end of Pareto front and solve two sets of optimization problems. In each one, the other objective function value is a constraint relaxed at each step for a new optimization problem. The proposed approach is executed for multiple times (one execution for each point on the Pareto optimal front) to get the entire set of non-dominated Pareto optimal solutions. The total execution time required for the multiple runs of proposed efficient approach is much less than any evolutionary-based MOO technique. The proposed approach is expected to aid the system operator in robust decision-making.
The remainder of the paper is organized as follows. Section 2 of this paper describes the traditional single and multi-objective based OPF problem formulation. Section 3 presents the proposed efficient approaches for the single and multi-objective optimization problems. Simulation studies on IEEE 30 bus test system is given in Section 4. The contributions with concluding remarks are drawn in Section 5.
2 Traditional OPF: problem formulation
An energy management system (EMS) should help the system engineers to control and operate the network in real time. This will include facilities to capture the current state of electrical system and study proposed changes a few hours or days in advance. The engineer can determine the effects of an actual or potential fault or a proposed switching operation. The business objective is to operate the network at low cost for a given level of security. This is precisely what OPF algorithms are designed to solve [12, 13].
2.1 Objective functions
As mentioned earlier, in this paper, three objectives, i.e., generator fuel cost minimization, transmission/active power loss minimization, and L index minimization are considered, and they are described next:
2.1.1 Fuel cost minimization
The main objective of an OPF is to meet the load demand at minimum system operating cost while satisfying all the generating units and system’s operating constraints [12, 13, 38]. For the active power optimization problem, the fuel cost (FC) of generating units is considered as the objective function. The minimization function in the quadratic cost characteristics can be obtained as the sum of fuel costs of all the generators, and it is expressed as
The fuel cost function considering the non-convex and discontinuous characteristics is presented next:
The fuel cost function considering the valve point loading (VPL) effect is expressed as [12],
A generator with prohibited operating zones (POZs) has discontinuous input-output characteristics, and it is difficult to find the actual POZ by real operating records or performance testing. Generally, the optimum cost can be obtained by avoiding the operation in areas that are in actual operation. The feasible operating zones of ith generator can be represented as [12, 13],
2.1.2 Transmission loss minimization [12, 13]
For solving the reactive power optimization problem, transmission loss (TL)/active power loss minimization is considered as the objective function. The transmission loss in each line can be calculated from the power flow solution. The total active power loss is the sum of power loss in each line, and it is expressed as [12]
2.1.3 Voltage stability enhancement index or L index minimization
In this paper, voltage stability enhancement index (VSEI)/L index is selected to monitor the voltage stability in power system [12, 13]. It uses the information from a normal power flow and it varies in the range of 0 (no load) to 1 (voltage collapse). The L index of the system is formulated as [12, 13],
where
The VSEI/L indices for the given loading condition are computed for all the load busses and the maximum of L indices gives the proximity of the system to voltage collapse.
2.2 OPF problem: constraints
2.2.1 Equality constraints
These constraints reflect the physics of the power system and they are the typical load flow equations. These constraints are formulated as,
In Eqs. (10) and (11), i = 1, 2, 3, ..., n, and θik = θi − θk.
2.2.2 Inequality constraints for the OPF problem
These constraints represent system operating limits.
A. Generating unit constraints
Generator-active, reactive power outputs and voltage magnitudes are limited by their minimum and maximum constraints, and they are represented as,
B. Transformer constraints
Transformer taps have minimum and maximum setting limits and they are expressed as,
C. Switchable VAR sources
The switchable VAR sources have restrictions as follows,
D. Security constraints
These constraints include the limits on load bus voltage magnitudes and thermal power flow limits of transmission lines and they are represented as,
The above equations, i.e., (17) and (18), do not include the N-1 contingency criterion. Including the N-1 criteria is a scope for the future research work.
2.3 Traditional multi-objective optimization
A multi-objective optimization (MOO) problem has many objectives which are to be optimized simultaneously. This MOO optimization problem is subjected to a number of equality and inequality constraints which the solution should satisfy. The MOO problem is represented by [12],
where x is a vector of decision variables. Equation (19) represents the objective function vector. Equations (20) and (21) represent the set of equality and inequality constraints, respectively. The principle of an ideal MOO is to determine multiple trade-off optimal solutions/Pareto optimal solutions with a wide range of values for objectives and select one of these solutions using the higher level information. This higher-level information is generally taken from the domain expertise.
2.3.1 Pareto optimality
The MOO problem is solved to determine a set of decision variables x* = (x1*, x2*, x3*, ..., xn*) in the set of all vectors J which provides optimal objective functions (Eq. (19)), satisfying equality and inequality constraints (Eqs. (20) and (21)) [39, 40]. The vector of x*∈J is said to be Pareto optimal if there does not exist any other x∈J such that Ji(x) ≤ Ji(x*) for all i = 1, ..., Nobj and Ji(x) < Ji(x*) for at least one i. The definition of Pareto optimality means that x* is Pareto optimal solution if there exists no feasible vector of decision variables x∈J which would decrease some objective function without causing a simultaneous increase in any one of other objectives. This concept always leads to a set of solutions called Pareto optimal set. The obtained plot of Pareto optimal set is called Pareto optimal front.
2.3.2 Pareto-based approaches for solving the MOO problems
A number of Pareto-based approaches have been proposed in the literature [39, 40]. The first-generation Pareto-based approaches are (i) niched Pareto genetic algorithm (NPGA), (ii) non-dominated sorting genetic algorithm (NSGA), (iii) multi-objective genetic algorithm (MOGA). The second generation of multi-objective (MO) algorithms introduced elitism into the optimization process. Elitism in MOO refers to the use of an external population to retain the non-dominated solutions. The second-generation MO evolutionary algorithms are (i) strength Pareto evolutionary algorithm (SPEA), (ii) strength Pareto evolutionary algorithms-2 (SPEA2), (iii) Pareto archived evolution strategy (PAES), (iv) non-dominated sorting genetic algorithm-2 (NSGA-II), (v) niched Pareto genetic algorithm-2 (NPGA2), (vi) Pareto envelope-based selection algorithm (PESA), and (vii) micro genetic algorithm (MGA).
3 Proposed approach for solving the OPF with MOO
A general MOO problem solves two or more conflicting objectives simultaneously subjected to all the equality and inequality constraints. As mentioned earlier, in this paper, we have considered generation cost, transmission loss minimization, and VSEI as multiple objectives to be optimized. However, there is no requirement for solving these three objectives simultaneously. Fuel cost minimization is an important objective under all operating conditions. The loss minimization objective is appropriate only at unstressed loading condition. The VSEI is used as a supplementary objective to ensure that appropriate stability margin is available and it is used at stressed loading condition. Therefore, in this paper, fuel cost and loss minimization objectives are optimized simultaneously at normal/unstressed loading condition and fuel cost and VSEI objectives are optimized simultaneously at stressed loading condition. Therefore, at any time, two objective functions are optimized simultaneously, and they are represented as,
here, J1is fuel cost minimization function, J2 is the loss minimization function, and J3 is the L index minimization function. From the literature, it is clear that the best way to solve this problem is by using the any evolutionary-based MOO technique with Pareto optimal front. But, as mentioned earlier, this approach is computationally expensive. Therefore, this paper proposes an efficient MOO approach to obtain the Pareto optimal front.
3.1 Obtaining the Pareto optimal front using the proposed efficient MOO approach
In the proposed MOO approach, the first half of specified number of Pareto optimal solutions are determined by optimizing the fuel cost minimization (J1) function considering the other objective (i.e., transmission loss (J2) or L index (J3)) as constraint. The second half of Pareto optimal solutions can be obtained in a vice versa manner. Therefore, in the first variant, the generator cost minimization (J1) is considered as the objective function and loss or L index is considered as the constraint. Mathematically, this first variant is formulated as,
In the second variant, transmission loss (J2) or L index (J3) is considered as the objective function and generator fuel cost function (J1) as a constraint. This can be formulated as,
From the literature, it can be observed that the second generation of multi-objective (MO) evolutionary algorithms introduces elitism into the optimization process. Elitism in MOO refers to the use of an external population to retain the non-dominated solutions. Let us assume this externally maintaining population size is 2N. This population stores a fixed number of non-dominated solutions. In every iteration, the newly found, non-dominated solutions are compared with the existing external population and resulting solutions are preserved. However, in the proposed efficient MOO approach, these 2N non-dominated Pareto optimal solutions are generated by executing the proposed efficient differential evolution (DE) algorithm for 2N times. The first and 2Nth solutions are the two extreme points on the Pareto optimal front. These extreme solutions can be obtained by solving the Eqs. (25) and (29) by relaxing the constraints (26) and (30), respectively. Therefore, for the first point on the Pareto optimal front, generator fuel cost function (J1) attains minimum/optimum value (\( {J}_1^{\min } \)), whereas loss (J2) or L index (J3) attains maximum value (\( {J}_2^{\max } \) or \( {J}_3^{\max } \)). This can be represented as
First point on the Pareto optimal front:
Similarly, for the last or 2Nth point on the Pareto optimal front, transmission loss (J2) or L index (J3) attains minimum/optimum value (\( {J}_2^{\min }\ \left(\mathrm{or}\right)\ {J}_3^{\min } \)), whereas fuel cost (J1) attains maximum value (\( {J}_1^{\max } \)). This can be represented as
2Nth point on the Pareto optimal front:
The remaining (2N-2) points on the Pareto optimal front can be determined by solving the equations (25) and (29), N-1 times with different \( {J}_2^{\mathrm{specified}} \) (or)\( \kern0.5em {J}_3^{\mathrm{specified}} \) and \( {J}_1^{\mathrm{specified}} \) values, respectively, in each run. For the N-1 runs of Eq. (25), the \( {J}_2^{\mathrm{specified}} \) varies as
Similarly, for the N-1 runs of Eq. (29), the \( {J}_1^{\mathrm{specified}} \) varies as
After obtaining these 2N points/solutions, sort in the ascending order of \( {J}_1 \) value obtained for each solution leads to the Pareto optimal set/front. After obtaining the Pareto optimal front, the best compromise solution can be determined by the system operator/decision maker using the fuzzy min-max approach. The description of fuzzy min-max approach is presented in [12, 13, 41].
3.2 Implementation of proposed efficient approach
From Section 3.1, it is clear that we need to run the single-objective optimization for each point on the Pareto optimal front. In this paper, efficient differential evolution (DE) algorithm is used to solve this single-objective optimization problem. The efficient DE is implemented using the algorithm presented in reference [13]. The efficient DE algorithm uses the concept of incremental load flow model based on the sensitivities and lower and upper bounds of objective function values [12, 13]. By using this approach, the number of power flows to be executed is reduced substantially, resulting in the solution seed up. All the benefits of evolutionary algorithms, such as handling of discrete variables, ability to handle non-convex, discontinuities in the objective function, and the MOO are still available in the proposed efficient DE approach.
As mentioned earlier, the efficient approach uses the incremental variables and the quadratic generator fuel cost function with incremental variables is formulated as [12],
The generator fuel cost minimization function considering the valve point loading (VPL) effect in terms of incremental variables is expressed as [12],
The transmission loss minimization function in terms of incremental variables is represented as [12],
The above Eqs. (38) and (39) are non-linear, non-convex and they can be solved using the proposed efficient DE approach.
3.3 Constraints
All the objective functions mentioned in this paper are subjected to the equality constraints mentioned in Section 2.2.1 (i.e., Eqs. (10) and (11)).
3.3.1 Constraints on control variables
The ∆PGi, ∆VGi, ∆Ti, and ∆Bsh , i are constrained by their lower and upper limits, and they are expressed as,
3.3.2 Constraint on reactive power generation
The changes in reactive power generation (∆QGi) is limited by,
3.3.3 Transmission line flow constraints
The power flow through each line (Pij) is limited by,
3.3.4 Power balance constraint inside the DE optimization
The power balance constraint inside the DE algorithm in terms of incremental variables is expressed as,
3.4 Incremental function/variable evaluation
The solution for the dependent voltages and angle changes (ΔX) can be obtained from the converged power flow, and it can be expressed as,
The effect of changes in control variables on the mismatches are reflected as [42],
where M, A, B, and C are the sensitivity matrices with respect to Upq, VG , T, and Bsh, respectively, and they are represented as
Let Y = J−1. Then, the [ΔX] can be modified as,
where A1 = [YM], A2 = [YA], A3 = [YB], and A4 = [YC].
From the above equation, the changes in voltage magnitudes and angles are represented as [12],
3.4.1 Updating the control variables
All the control variables are updated using,
By using these updated control variables, transmission loss, fuel cost, L index, reactive power generation, and power flow through each transmission line can be evaluated. The transmission loss (Ploss) in terms of incremental state variables using the updated X can be evaluated using
hence, \( {\varDelta P}_{\mathrm{loss}}={P}_{\mathrm{loss}}-{P}_{\mathrm{loss}}^0 \).
The reactive power generation (QGi) in terms of incremental state variables using the updated X can be evaluated using,
hence, \( {\varDelta Q}_{\mathrm{Gi}}={Q}_{\mathrm{Gi}}-{Q}_{\mathrm{Gi}}^0 \).
The power flow through the transmission line (Pij) in terms of incremental state variables using the updated X can be evaluated using,
hence, \( {\varDelta P}_{\mathrm{ij}}={P}_{\mathrm{ij}}-{P}_{\mathrm{ij}}^0 \).
From the above discussion, it can be concluded that all the objective functions, Ploss, QG, and Pij are still non-linear.
By using this incremental variable model the computational burden can be reduced substantially by performing the much lesser load flows. The computational burden can be reduced further by determining the minimum and maximum bounds for the generation cost (i.e., objective function value). The lower/minimum bound can be determined by performing the economic dispatch (ED) problem. The optimum fuel cost obtained using the ED, will serve as a lower bound. The upper bound can be determined by performing the OPF using the gradient method or any other software packages such as General Algebraic Modeling System (GAMS). By determining these lower and upper bounds, the individuals in the differential evolution (DE) population are selected, whose optimum fuel cost falls between these bounds. In every iteration, the individuals whose objective function values lies between these lower and upper cost bounds are selected, and all other individuals will be rejected. This will reduce the total number of individuals, and hence the total number of power flows to be performed in the OPF problem. Hence, the execution time per iteration is reduced substantially [13]. The step-by-step procedure for solving the MOO problem is described next:
3.5 Algorithm for the proposed efficient MOO approach 1
-
Step 1:
Select the desired number of non-dominated Pareto optimal solutions to form the Pareto optimal front. Let 2N be the required number of Pareto optimal solutions.
-
Step 2:
Solve Eqs. (25) and (29), and determine the two extreme points on the Pareto optimal front.
-
Step 3:
Determine the remaining 2N-2 points on the Pareto optimal front by solving Eqs. (25) and (29), N-1 times with different \( {J}_2^{\mathrm{specified}} \) (or)\( \kern0.5em {J}_3^{\mathrm{specified}} \) and \( {J}_1^{\mathrm{specified}} \), respectively, in each run. For N-1 executions of Eq. (25), the \( {J}_2^{\mathrm{specified}} \) (or)\( \kern0.5em {J}_3^{\mathrm{specified}} \) is varied using Eq. (35). Similarly, for N-1 executions of Eq. (29), the \( {J}_1^{\mathrm{specified}} \) is varied using Eq. (36).
-
Step 4:
Steps 5 to 15 are used to solve Eqs. (25) and (29) with less execution time.
-
Step 5:
Neglecting the network constraints and losses, find the economic dispatch solution (PGi0) using the DE algorithm.
-
Step 6:
Run the base case load flow with the PGi0s obtained in step 5, and with initial guesses for the reactive control variables.
-
Step 7:
Determine the lower and upper bounds of objective function value (such as generation cost, and transmission loss). The lower bound can be determined by executing the economic dispatch (ED) problem. The optimum fuel cost obtained using the ED will be the lower bound for the objective function under consideration. The upper bound can be determined by executing the OPF using any gradient based approach or any other software package.
-
Step 8:
Generate the individuals, whose optimum objective function values are between the determined lower and upper bounds.
-
Step 9:
In every generation, the individuals whose objective function values lies between the lower and upper bounds are selected, and all other individuals are rejected. From the second iteration onwards, run the power flow only for the best-fit individual. Determine the sensitivities after the converged power flow solution. Reader may refer to references [12] and [13] for more details of sensitivity analysis.
-
Step 10:
Find the load flow solution for the individuals whose objective function values are between the lower and upper bounds using the sensitivities from this power flow in a non-linear approximation of variables in each iteration.
-
Step 11:
Determine the changes in dependent voltages and angles using the sensitivities calculated in step 9. Update the control variables.
-
Step 12:
Using these updated variables, determine the objective function value.
-
Step 13:
Check the convergence criteria, i.e., if fitness (first individual) = fitness(last individual). If the convergence criteria is satisfied, then calculate the optimum objective function value and then STOP. Otherwise, apply the DE operators and then generate the new population from old one.
-
Step 14:
Update the iteration count.
-
Step 15:
Check if iteration count > maximum number of iterations. If yes, STOP. Otherwise, repeat from step 9.
3.6 Algorithm for the proposed efficient MOO: Approach 2
Step 1:Implement steps 2 and 3 of Section 3.5 using the successive, non-linear-based gradient OPF (i.e., SOPF; in this paper, we used the MATLAB optimization toolbox (FMINCON function), to get the lower and upper bounds for every point on the Pareto front including the extreme points. Then, the meta-heuristic based DE algorithm corrects the points on the Pareto optimal front.
Step 2: First consider the extreme points of Pareto front (one at a time). Obtain the lower and upper bounds by using the gradient based OPF and then correct the same using the meta-heuristic algorithm. Then, move to the other points (again one by one) using the similar procedure. SOPF is always part of the gradient based OPF, and the incremental variable approach is always used for the meta-heuristic algorithm.
4 Results and discussion
The performance of proposed efficient algorithm for solving the MOO problem is tested on standard IEEE 30 bus system. It is implemented using MATLAB R2008a software on a i7, 3.10GHz processor with 3.24 GB of RAM. Here, DE algorithm is selected for implementing the proposed efficient MOO algorithm. However, the proposed approach is generic enough to implement with any other evolutionary algorithm. The selected control parameters of DE are mutation constant is 0.9, crossover constant is 0.5, population size is 50, and the maximum number of iterations is 500. These control parameters are selected after some trials and the experience of many researchers, for a wide variety of problems. These are not depending on the operating condition of the problem. The number of non-dominated solutions, i.e., desired number of points on the Pareto optimal front selected are 50 (i.e., for the proposed efficient MOO approach, N = 25).
The system data, maximum, and minimum limits of control variables and initial operating points are taken from [6], [12, 13]. The control variables considered in this active and reactive power OPF are generator active power outputs, generator voltage magnitudes, transformer taps and the bus shunt susceptances. The IEEE 30 bus test system has six generating units located at busses 1, 2, 5, 8, 11, and 13; and nine shunt VAR compensators located at busses 10, 12, 15, 17, 20, 21, 23, 24, and 29. In addition, four tap-setting transformers with off-nominal tap ratio at lines 6–9, 6–10, 4–12, and 28–27 [2] are considered. In this paper, the Pareto optimal front obtained with proposed efficient MOO algorithm is compared with the evolutionary-based, non-dominated sorting genetic algorithm-2 (NSGA-II) algorithm. To demonstrate the suitability and effectiveness of proposed efficient MOO approach, various case studies are performed and they are presented next:
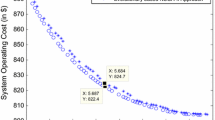
4.1 Case 1: solving the MO-OPF problem with quadratic cost function at base case or unstressed loading condition
As explained earlier, at base case/unstressed loading condition, the generation cost and transmission loss minimizations are considered as the two conflicting objective functions to be optimized simultaneously. Because there is no need to optimize L index/VSEI objective as the value of L index is much away from the system voltage collapse point. Figure 1 depicts the distribution of non-dominated/Pareto optimal solutions in the Pareto optimal front obtained using the proposed efficient MOO approaches 1 and 2 and the evolutionary-based NSGA-II algorithm. In the proposed efficient MOO approach 1, the proposed efficient single-objective optimization considering cost minimization objective with transmission loss constraint is run for 25 times and the loss minimization objective function with cost constraint is run for 25 times. These 50 runs of proposed efficient approach 1 give the entire Pareto optimal front.

Pareto optimal fronts for case 1 using proposed efficient MOO approaches and NSGA-II algorithm
As mentioned earlier in Section 3.6, determine the lower and upper bounds of every point on the Pareto front using the gradient-based OPF and then correct the same using the proposed efficient DE algorithm. The obtained Pareto optimal front using this proposed efficient MOO approach 2 is depicted in Fig. 1. From Fig. 1, it can be observed that the Pareto optimal solutions obtained with proposed efficient MOO approaches 1 and 2 are diverse and well distributed over the entire Pareto optimal front.
Whereas the evolutionary algorithms are population based, and the reproduction operation causes new generations by recombination of old solutions. This enables determining several members of Pareto optimal set in a single run, instead of performing a series of separate runs. Figure 1 also shows the best Pareto optimal front obtained using the NSGA-II algorithm in a single run. However, as explained earlier the difficulty of this evolutionary-based NSGA-II algorithm is the excessive computational time.
After obtaining the Pareto optimal front, the best compromise solution can be found using the fuzzy min-max approach. Table 1 presents the control variable settings and the best compromise solution obtained by using the proposed efficient approaches 1 and 2 and the evolutionary-based NSGA-II approach. From this table, it is clear that the minimum generation cost and transmission loss obtained by using the proposed efficient MOO approaches are better than the NSGA-II algorithm. The computational/ execution time required for solving case 1 using the proposed efficient MOO approaches and the NSGA-II approach is 17.0209, 13.7538, and 183.2058s, respectively, i.e., the proposed efficient MOO approach 1 is 10.76 times faster than the NSGA-II approach, and the proposed efficient approach 2 is 13.32 times faster than the NSGA-II algorithm. Overall, it can be concluded that the proposed efficient MOO approaches provides good quality Pareto optimal fronts as compared to evolutionary based NSGA-II approach in an extremely efficient manner.
4.2 Case 2: solving the MO-OPF problem considering the cost minimization function with VPL and POZs effects at base case or unstressed loading condition
In this case also, the base case/unstressed loading condition is considered, hence, the system operating cost minimization and loss minimization are considered as the two conflicting objective functions to be optimized. As mentioned earlier, there is no need to optimize the VSEI objective function as the L index value is much away from the voltage collapse point. Figure 2 shows the Pareto optimal fronts obtained by using the proposed efficient MOO approach (i.e., approach 1) and the NSGA-II algorithm. From this figure, it can be seen that the Pareto optimal solutions obtained using the proposed efficient MOO approach are diverse and well distributed over the entire Pareto optimal front. As mentioned earlier, after obtaining the Pareto optimal fronts, the best compromise solution can be obtained using the fuzzy min-max approach. Table 2 presents the optimum control variables settings and the best compromise solution obtained by using the proposed efficient MOO approach and the NSGA-II algorithm.

Pareto optimal front for case 2 using the proposed efficient MOO approach and the evolutionary-based NSGA-II approach
From Table 2, it can be clear that the best compromise solutions (i.e., system operating cost and loss) obtained using proposed efficient MOO algorithm and the NSGA-II algorithm are (US$863.31/h and 10.29 MW) and (US$863.20/h and 10.49 MW), respectively. This shows that the best compromise solution obtained with the proposed efficient MOO approach is better than the NSGA-II algorithm. The time required for the execution for solving case 2 using the proposed efficient MOO algorithm and NSGA-II algorithm is 19.0856 and 189.915 s, respectively; i.e., the proposed efficient MOO algorithm is approximately 10 times faster than the evolutionary-based NSGA-II approach.
4.3 Case 3: solving the MO-OPF problem with quadratic fuel cost function considering stressed loading condition
In this case, the stressed loading condition is created by taking the transmission line 36 out (i.e., the line connected between busses 27 and 28), which is considered as the worst contingency in this test system, and by increasing the base case load demand. At this stressed/critical loading condition, the total load of the system is 357.084 MW. As mentioned earlier, the generation cost minimization is an important objective under all the operating/loading conditions. However, during the stressed loading condition, the VSEI needs to be optimized as its value is very close to the system voltage collapse point. Therefore, in this case, generator fuel cost and the VSEI objectives need simultaneous optimization. By optimizing the VSEI, the voltage profile of the system increases, which in turn results minimum transmission losses. Figure 3 depicts the Pareto optimal front of quadratic fuel cost and VSEI objectives at the stressed loading condition, i.e., for case 3.

Pareto optimal front of fuel cost and VSEI for case 3 using the proposed efficient MOO approach and the evolutionary-based NSGA-II algorithm
Table 3 presents the optimum control variables settings and the best compromise solutions obtained using the proposed efficient MOO algorithm and the evolutionary-based NSGA-II algorithm. The best compromise solution, i.e., (generation cost and VSEI) obtained using the proposed efficient MOO and NSGA-II approaches is (US$1130.07/h and 0.6521) and (US$1133.25/h and 0.6528), respectively. The computational time required for solving case 3 using the proposed efficient MOO and NSGA-II approaches is 19.9614 and 200.844 s, respectively; i.e., the proposed efficient MOO algorithm is approximately 10 times faster than the NSGA-II approach.
4.4 Case 4: solving the MO-OPF problem considering the fuel cost function with VPL and POZs effects at stressed loading condition
In this case also, the stressed loading condition is considered; therefore, system operating cost and L index minimizations are considered as the two conflicting objectives to be optimized. As mentioned earlier, by optimizing the L index, improves the voltage profile, which in turn reduces the transmission losses. Hence, there is no need to optimize loss minimization objective. Figure 4 shows the Pareto optimal fronts obtained using the proposed efficient MOO approach and the NSGA-II algorithm. From Fig. 4, it is clear that the Pareto optimal solutions obtained using proposed efficient MOO algorithm are diverse and well distributed over the entire Pareto optimal front.

Pareto optimal front of generator fuel cost and VSEI for case 4 using the proposed efficient MOO approach and the evolutionary-based NSGA-II algorithm
Table 4 presents the optimum control variables settings and the best compromise solutions obtained by using the proposed efficient MOO algorithm and the NSGA-II algorithm. It shows that the best compromise solution obtained with proposed efficient MOO algorithm is better than the NSGA-II algorithm. The execution time required for solving the case 4 using proposed efficient MOO algorithm and evolutionary-based NSGA-II algorithm is 20.3016 and 204.732 s, respectively. This shows that proposed efficient MOO algorithm is approximately 10 times faster than the NSGA-II approach.
From the above simulation studies, it can be observed that proposed efficient MOO approach overcomes the main drawback, i.e., excessive execution time of the evolutionary-based MOO algorithms. The proposed efficient MOO approach is approximately 10 times faster than the evolutionary-based MOO approaches.
5 Conclusions
In this paper, a novel efficient multi-objective optimization algorithm is proposed to solve the multi-objective optimal power flow (MO-OPF) problem. It uses the incremental power flow methodology based on the sensitivities; and the lower and upper bounds of objective function values. In this paper, the MOO problem is solved considering the system operating cost, transmission losses, and L index as the objectives to be optimized while satisfying all the equality and inequality constraints. It also highlights the need for selecting judiciously, a combination of objectives that is best-suited for a given loading/operating condition. In the present paper, the proposed efficient MOO approach is implemented using the differential evolution (DE) algorithm. The simulation studies are performed on IEEE 30 bus system to demonstrate the effectiveness of the proposed efficient MOO approach. The simulation results shows that the Pareto optimal solutions obtained with proposed efficient MOO approach are diverse and well distributed over the entire Pareto optimal front. All the simulation studies indicate that the proposed efficient MOO algorithm is approximately 10 times faster than the evolutionary based MOO algorithms. Solving the proposed efficient MOO approach by including the N-1 contingency criteria is a scope for the future research work.
ΔPGi, Changes in the generator active power; ΔBsh,i, Changes in bus shunt susceptances; ΔVGi, Changes in the voltage magnitudes of generators; ΔTi, Changes in transformer tap positions; ai, bi, ci, Fuel cost coefficients of ith generator; PGi, Active power generation of ith generating unit; 2N, Number of non-dominated Pareto optimal solutions; NG, Number of generating units; NT, Number of tap changing transformers; NC, Number of shunt VAR compensators; NL, Number of load busses; Nl, Number of transmission lines; n, Number of busses in the system; Nobj, Number of objectives to be optimized simultaneously; PGi, QGi, Active and reactive power generations at bus i; PDi, QDi, Active and reactive power load demands at bus i; θik, Phase angle difference between the voltages at busses i and k; Gk, Conductance of a line k between bus i and j; J, Jacobian matrix; \( {J}_1^{\mathrm{specified}} \), Some specified value of fuel cost; \( {J}_2^{\mathrm{specified}} \), Some specified value of transmission loss; \( {J}_3^{\mathrm{specified}} \), Some specified value of L index/voltage stability enhancement index (VSEI)
References
Osman MS, Abo-Sinna MA, Mousa AA (2004) A solution to the optimal power flow using genetic algorithm. Appl Math Comput 155(2):391–405
Sailaja Kumari M, Maheswarapu S (2010) Enhanced genetic algorithm based computation technique for multi-objective optimal power flow solution. Int J Electr Power Energy Syst 32(6):736–742
Bakirtzis AG, Biskas PN, Zoumas CE, Petridis V (2002) Optimal power flow by enhanced genetic algorithm. IEEE Trans Power Syst 17(2):229–236
Abido MA (2002) Optimal power flow using particle swarm optimization. Int J Electr Power Energy Syst 24(7):563–571
Ongsakul W, Tantimaporn T (2006) Optimal power flow by improved evolutionary programming. Electric Power Components and Systems 34(1):79–95
Abou El Ela AA, Abido MA, Spea SR (2010) Optimal power flow using differential evolution algorithm. Electr Power Syst Res 80(7):878–885
Tang WJ, Li MS, Wu QH, Saunders JR (2008) Bacterial foraging algorithm for optimal power flow in dynamic environments. IEEE Trans Circuits and Systems I: Regular Papers 55(8):2433–2442
Duman S, Güvenç U, Sönmez Y, Yörükeren N (2012) Optimal power flow using gravitational search algorithm. Energy Convers Manag 59:86–95
C. A. Roa-Sepulveda, B. J. Pavez-Lazo, A solution to the optimal power flow using simulated annealing, Proc. IEEE Power Tech, vol. 2, pp. 5
Bhattacharya A, Chattopadhyay PK (2010) Biogeography-based optimization for solution of optimal power flow problem. Proc. Electrical Engineering/Electronics Computer Telecommunications and Information Technology, Chaing Mai, pp 435–439
Abido MA (2002) Optimal power flow using Tabu search algorithm. Electric Power Components and Systems 30(5):469–483
Surender Reddy S, Bijwe PR, Abhyankar AR (2014) Faster evolutionary algorithm based optimal power flow using incremental variables. International Journal of Electrical Power and Energy Systems 54:198–210
Surender Reddy S, Bijwe PR (2016) Efficiency improvements in meta-heuristic algorithms to solve the optimal power flow problem. International Journal of Electrical Power and Energy Systems 82:288–302
Lashkar Ara A, Kazemi A, Gahramani S, Behshad M (2012) Optimal reactive power flow using multi-objective mathematical programming. Scientia Iranica 19(6):1829–1836
Liu X, Xu W (2010) Minimum emission dispatch constrained by stochastic wind power availability and cost. IEEE Trans Power Syst 25(3):1705–1713
Abido MA (2004) Multiobjective optimal power flow using strength Pareto evolutionary algorithm. Universities Power Engineering Conference, Bristol, pp 457–461
M.A. Abido, Multiobjective particle swarm optimization for optimal power flow problem, 12th International Middle-East Power System Conference, Aswan, 2008, pp. 392–396
Hazra J, Sinha AK (2011) A multi-objective optimal power flow using particle swarm optimization. European Transactions on Electrical Power 1(1):1028–1045
Niknam T, Narimani MR, Aghaei J, Azizipanah-Abarghooee R (2011) Improved particle swarm optimization for multi-objective optimal power flow considering the cost, loss, emission and voltage stability index. IET Gereration, Transmission and Distribution 6(6):515–527
Abido MA, Al-Ali NA (2012) Multi-objective optimal power flow using differential evolution. Arab J Sci Eng 37(4):991–1005
Varadarajan M, Swarup KS (2008) Solving multi-objective optimal power flow using differential evolution. IET Gereration, Transmission and Distribution 2(5):720–730
Basu M (2016) Multi-objective optimal reactive power dispatch using multi-objective differential evolution. Int J Electr Power Energy Syst 82:213–224
Capitanescu F (2016) Critical review of recent advances and further developments needed in AC optimal power flow. Electr Power Syst Res 136:57–68
Abaci K, Yamacli V (2016) Differential search algorithm for solving multi-objective optimal power flow problem. Int J Electr Power Energy Syst 79:1–10
Daryani N, Hagh MT, Teimourzadeh S (2016) Adaptive group search optimization algorithm for multi-objective optimal power flow problem. Appl Soft Comput 38:1012–1024
Chaib AE, Bouchekara HREH, Mehasni R, Abido MA (2016) Optimal power flow with emission and non-smooth cost functions using backtracking search optimization algorithm. Int J Electr Power Energy Syst 81:64–77
Bouchekara HREH, Chaib AE, Abido MA, El-Sehiemy RA (2016) Optimal power flow using an improved colliding bodies optimization algorithm. Appl Soft Comput 42:119–131
Ding T, Li C, Li F, Chen T, Liu R (2017) A bi-objective DC-optimal power flow model using linear relaxation-based second order cone programming and its Pareto frontier. Int J Electr Power Energy Syst 88:13–20
M. Ding, H. Chen, N. Lin, S. Jing, F. Liu, X. Liang, W. Liu, Dynamic population artificial bee colony algorithm for multi-objective optimal power flow, Saudi Journal of Biological Sciences, 2017
Zhang J, Tang Q, Li P, Deng D, Chen Y (2016) A modified MOEA/D approach to the solution of multi-objective optimal power flow problem. Appl Soft Comput 47:494–514
Zhou J, Wang C, Li Y, Wang P, Li C, Lu P, Mo L (2017) A multi-objective multi-population ant colony optimization for economic emission dispatch considering power system security. Appl Math Model 45:684–704
Yuan X, Zhang B, Wang P, Liang J, Yuan Y, Huang Y, Lei X (2017) Multi-objective optimal power flow based on improved strength Pareto evolutionary algorithm. Energy 122:70–82
Bai W, Eke I, Lee KY (2017) An improved artificial bee colony optimization algorithm based on orthogonal learning for optimal power flow problem. Control Eng Pract 61:163–172
Surender Reddy S (2017) Optimizing energy and demand response programs using multi-objective optimization. Electr Eng 99(1):397–406
Roy PK, Ghoshal SP, Thakur SS (2010) Combined economic and emission dispatch problems using biogeography-based optimization. Electr Eng 92(4):173–184
J. Ning, B. Zhang, T. Liu, C. Zhang, An archive-based artificial bee colony optimization algorithm for multi-objective continuous optimization problem, Neural Computing and Applications, pp. 1–11, 2016
Jia L, Cheng D, Chiu MS (2012) Pareto-optimal solutions based multi-objective particle swarm optimization control for batch processes. Neural Comput & Applic 21(6):1107–1116
Reddy SS, Rathnam CS (2016) Optimal power flow using glowworm swarm optimization. Int J Electr Power Energy Syst 80:128–139
K. Deb, Multi-objective optimization using evolutionary algorithms, John Wiley and Sons, 2001
Sailaja Kumari M, Maheswarapu S (2010) Enhanced genetic algorithm based computation technique for multi-objective optimal power flow solution. Int J Electr Power Energy Syst 32(6):736–742
Surender Reddy S, Abhyankar AR, Bijwe PR (2011) Reactive power price clearing using multi-objective optimization. Energy 36(5):3579–3589
IEEE tutorial course on optimal power flow: solution techniques, requirements and challenges, 1996
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Rights and permissions
About this article

Cite this article
Surender Reddy, S., Bijwe, P.R. Differential evolution-based efficient multi-objective optimal power flow. Neural Comput & Applic 31 (Suppl 1), 509–522 (2019). https://doi.org/10.1007/s00521-017-3009-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-017-3009-5