
Abstract
In this work, we concentrate on the analysis of the time-fractional Rosenau–Hyman equation occurring in the formation of patterns in liquid drops via q-homotopy analysis transform technique and reduced differential transform approach. The q-homotopy analysis transform algorithm can provide rapid convergent series by choosing the appropriate values of auxiliary parameters ħ and n at large domain. The reduced differential transform technique gives wider applicability due to reduction in computations and makes the calculation much simpler and easier. The proposed techniques are realistic and free from any assumption and perturbation for solving the time-fractional Rosenau–Hyman equation.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
The theory of fractional derivatives and integral operators has attracted a great attention of scientists due to its wide uses and importance in mathematics, physics, biology, economics and finance. The mathematical models, coupled equations, linear and nonlinear equations having initial and boundary conditions, applied in various fields and technologies, can extend and describe more general through the fractional calculus [1–8]. An excellent literature and hereditary properties involving fractional operators for differential and integral equations concerning fractional calculus were reported by number of researchers [9–16]. The Rosenau–Hyman equation occurs in formation of patterns in liquid drops having compaction solutions was discovered by Rosenau and Hyman [17]. The compactons studies of the Rosenau–Hyman equation play effective role in applied sciences and mathematical physics [18–23]. Recently, the fractional Rosenau–Hyman equation is studied by Molliq and Noorani by using VIM and HPM [24]. These techniques have some shortcomings such as small convergence region, strongly depend on Lagrange’s multiplier, correctional functional, calculating integrals appear in VIM and small/large parameters assumptions mentioned in HPM.
In this work, numerical simulation of the time-fractional Rosenau–Hyman equation is conducted with the application of q-homotopy analysis transform technique (q-HATT) and reduced differential transform technique. The q-HATT is a graceful combination of q-HAM and Laplace transform, which provides multiple approximate solutions. The q-HAM proposed by El-Tavil and Huseen [25, 26] is a generalized form of homotopy analysis scheme firstly discovered by Liao [27, 28] and homotopy perturbation approach firstly given by He [29–31]. In recent years, semi-analytical techniques have also been coupled with Laplace transform algorithm such as Laplace decomposition technique [32], homotopy perturbation transform technique [33–35] and homotopy analysis transform technique [36–38] to analyze integer and fractional differential equations describing real-word problems arising in scientific and technological areas.
The q-HATT gives us with a straightforward way to insure the convergence of series solution with the help of the auxiliary parameter ħ, the embedding parameter \(q \in \left[ {0,\frac{1}{n}} \right]\,\,\,(n \ge 1),\) asymptotic parameter n, auxiliary function H(x, t) and the initial guess u 0(x, t) to find the series solution in more general form. On the other hand, we illustrate the reduced differential transform technique (RDTT) [39–41] to examine the time-fractional Rosenau–Hyman equation with small size computational work and provide rapidly convergent series solution. The proposed schemes can be performed very easily (free from any assumption or calculating integrals), uniformly valid in nonlinear equations for small/large parameters. The outline of the present article is as follows: In Sect. 2, the definition of Caputo fractional derivative and its Laplace transform formula are discussed. In Sect. 3, the basic idea of q-HATT is presented. Section 4 contains the basic idea of RDTT. In Sect. 5, implementation of q-HATT on time-fractional Rosenau–Hyman equation is discussed. In Sect. 6, RDTT is applied on time-fractional Rosenau–Hyman equation. Numerical results and discussion for time-fractional Rosenau–Hyman equation are presented in Sect. 7. Finally, Sect. 8 is dedicated to conclusions.
2 Preliminaries
Here, we present the basic definition and properties of fractional ordered derivatives.
Definition 2.1
If f (t) be a function of t, then the fractional ordered derivative in terms of Caputo [42] is defined and expressed as:
for \(n - 1 < \alpha \le n,\,\,n \in N,\,\,t > 0.\)
Definition 2.2
If \(D_{t}^{\alpha } f(t)\) is the Caputo derivative of the function f(t), then its Laplace transform is presented as [42, 43]
3 Basic idea of q-HATT
To demonstrate the basic plan and solution procedure of this approach, we take a fractional nonlinear differential equation written as:
In the fractional Eq. (3), \(D_{t}^{\alpha } u(x,t)\) is indicating the fractional derivative of the function u(x, t) defined by Caputo, R is denoting the linear differential operator, N is representing the general nonlinear differential operator and g(x, t) is representing a function arising from the source.
By putting up the application of Laplace transform on fractional Eq. (3), we have
By employing the differentiation formula of the Laplace transform, it gives
On simplifying, we get the following result:
According to HAM, the nonlinear operator is presented as:
In Eq. (7) \(q \in [0,\,1/n]\), and \(\phi (x,\,t{\kern 1pt} {\kern 1pt} ;q)\) is indicating a real function of x, t and q. In view of well-known HAM, the homotopy is constructed in the following manner:
In Eq. (8), L is denoting the Laplace transform operator, \(n \ge 1,\,q \in \left[ {0,\frac{1}{n}} \right]\) is known as the embedding parameter, H(x, t) indicates a nonzero auxiliary function, ħ ≠ 0 is an auxiliary parameter and u 0(x, t) is an initial guess of u(x, t). It is clear that, when the embedding parameter q = 0 and \(q = \frac{1}{n},\) it gives
respectively. Hence, as q increases from 0 to \(\frac{1}{n}\), the solution \(\phi (x,t{\kern 1pt} {\kern 1pt} ;q)\) varies from the initial guess u 0(x, t) to the solution u(x, t) of the nonlinear fractional differential equation. On expanding the function \(\phi (x,t{\kern 1pt} {\kern 1pt} ;q)\) in series form by using Taylor’s formula about q, we have
where
If the values of u 0(x, t), n, ħ and H(x, t) are selected in a proper manner, the series (10) converges at \(q = \frac{1}{n}\), and then, we get
Equation (12) must be one of the solutions of the nonlinear Eq. (3). Using definition (12), the governing equation can be derived from the deformation equation of zero order (8).
Now, we define the vectors as
Next on differentiating the zeroth-order deformation Eq. (8) m-times with respect to q and then dividing them by m! and finally putting q = 0, we arrive at the following mth-order deformation equation:
Using the inverse Laplace transform in Eq. (14), it gives
In the above Eq. (15), the values of \(\Re_{m} (\vec{u}_{m - 1} )\) and k m are presented as:
and
respectively.
4 Reduced differential transform technique (RDTT)
To demonstrate the basic solution procedure of RDTT, we take a function p(x, t) and consider that it can be expressed as a product of two single variable functions, i.e., \(p(x,t) = \delta (i)\eta (j)\). On the basis of the properties of the one-dimensional differential transform, the function p(x, t) can be defined as:
where \(P(i,j) = \delta (i)\eta (j)\) is the spectrum of p(x, t).
Let R D indicates the reduced differential transform operator and \(R_{D}^{ - 1}\) the inverse reduced differential transform operator [39]. The basic definitions and operations of the reduced differential transform are as follows.
Definition 4.1
If p(x, t) is analytical and continuously differentiable about the space variable x and time variable t in the domain of interest, then the t-dimensional spectrum function
is the fractional reduced transformed function of p(x, t), where α is a parameter which describes the order of time-fractional derivatives. The differential inverse transform of P k (x) is demonstrated in the following way
On comparing Eqs. (19) and (20), it can be observed that
If we set t = 0, Eq. (13) is reduced to
From the above definition, it can be observed that the idea of the fractional reduced differential transform is obtained from the power series expansion of a function.
Definition 4.2
If \(u(x,t) = R_{D}^{ - 1} [U_{k} (x)],v(x,t) = R_{D}^{ - 1} [V_{k} (x)]\) and the convolution Θ indicates the fractional reduced differential transform version of the multiplication, then the fundamental operations of the fractional reduced differential transform are expressed in Table 1.
5 Implementation of q-HATT
Here we show the efficiency and applicability of q-HATT for examining the time-fractional Rosenau–Hyman equation which is characterized as
with the initial condition
Here, u = u(x, t) is the function of space coordinate x and time t, c is arbitrary constant. The time-fractional Rosenau–Hyman equation occurs in the investigation of nonlinear dispersion in the formation of patterns in liquid drops [17].
To solve Eqs. (23) and (24), we apply the Laplace transform along with the initial condition, and it gives
The nonlinear operator is
and thus
The deformation equation of mth-order is given by:
Using the inverse of Laplace transform operator on above equation, we get the following result
On solving Eq. (29), it yields
Using the same way, the remaining of the components u m (x, t) for m > 4 can be obtained, and the series expansion is given as:
Equation (31) represents the family of q-HATT series solutions for Eq. (23). The expansion of q-HATT series solution (31) directly converges to HAM when n = 1 and RDTT, HPM, VIM solution series by putting n = 1 and ħ = −1. If we set ħ = −1, n = 1 and α = 1 in \(\sum\nolimits_{m = 0}^{N} {u_{m} (x,t)} \left( {\frac{1}{n}} \right)^{m}\) when N → ∞, it converges to the standard exact solution given as [44]
where c indicates the arbitrary constant [17].
6 Implementation of RDTT
Here, we illustrate RDTT for examining the time-fractional Rosenau–Hyman equation (23) with initial condition (24)
By the application of RDTT to Eq. (23), we get the following recurrence relation:
Using the RDTT to the initial condition (24), we get
Using Eq. (34) in Eq. (33), we obtain the following values of U m (x), for m = 1, 2, 3, …, as
Using the above way, the rest of the components can be found, and using the differential inverse reduced transform of U m (x), m = 1, 2, 3, …, we get
which converges to the standard exact solution given as below [44]:
where c represents the arbitrary constant [17].
This is the same solution series obtained by q-HATT, at ħ = −1, n = 1. We observe that the reduced differential transform technique is very easier to implement and requires less computational work for convergent solution series. The maple package is used for graphical representation of q-HATT solution series and RDTT (q-HATT, ħ = −1, n = 1) solution series of time-fractional Rosenau–Hyman equation.
7 Results and discussion
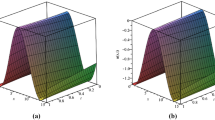
In this part of the article, we enumerate the results found by using q-HATT and RDTT. The multiple graphical surface solutions of Eq. (23) are depicted in Fig. 1. In Fig. 1a–c, we can observe that the results obtained with aid of q-HATT and RDTT are in an excellent agreement with the exact solution. Figure 2 depicts the relation between approximate solution u(x, t) and time t for distinct values of α. In Fig. 2, it is to be noted that the value of α significantly affects the displacement. Figure 3a–d represents ħ- and n-curves. The value of ħ is selected, corresponding to arbitrary n(n ≥ 1) from the convergence range. From Fig. 3a–d, we can notice from ħ- and asymptotic n-curves that q-HATT have great efficiency and accuracy and gives convergent solution series at large admissible domain. We can observe from ħ-curves that the convergence range is directly proportional to n

Fourth-order family of approximate q-HATT (for ħ = −1 and n = 1) and RDTT solution u(x, t) of Eq. (23) versus x and time t at c = 0.5 and α = 1: a exact solution; b approximate solution; c absolute error E 4(u) = |u ex − u app|

Fourth-order approximate q-HATT (for ħ = −1 and n = 1) and RDTT solution u(x, t) versus time t for Eq. (23) at x = 20 and c = 0.5 for various values of α

ħ- and asymptotic n-curves show the comparative study at x = 20 and c = 0.5 for fourth-order approximation q-HATT solutions of Eq. (23): a ħ-curve at n = 1 and t = 0.05 for different values of α; b ħ-curve at n = 10 and t = 0.05 for different order approximation; c ħ-curve at n = 200 and t = 0.05 for different order approximation; d asymptotic n-curves, at (ħ, t) = (−1, 0.05) for distinct values of α
8 Conclusions
In this paper, q-HATT is used for numerical simulation of the time-fractional Rosenau–Hyman equation at large admissible domain compared to VIM, HPM [24] and RDTT. The ħ- and asymptotic n-curves show the validity of q-HATT for infinitely many acceptable q-HATT solutions and the middle point of ħ-curve interval, i.e., ħ = −n is a suitable choice, at this point the numerical solution converges to the exact solution. The application of RDTT tool to solve time-fractional Rosenau–Hyman equation in efficient way is demonstrated. Moreover, the computational work contained in RDTT tool is very small, simple and attractive. Thus, it can be concluded that the both q-HATT and RDTT are highly efficient and user friendly to investigate nonlinear fractional differential equations.
References
Atangana A, Alabaraoye E (2013) Solving a system of fractional partial differential equations arising in the model of HIV infection of CD4+ cells and attractor one-dimensional Keller–Segel equations. Adv Differ Equ. doi:10.1186/1687-1847-2013-94
Rivero M, Trujillo J, Vazquez L, Velasco M (2011) Fractional dynamics of populations. Appl Math Comput 218:1089–1095
Chen Y, An YH (2009) Numerical solutions of coupled Burgers equations with time and space fractional derivatives. Appl Math Comput 200:87–95
Su X (2009) Boundary value problem for a coupled system of nonlinear fractional differential equations. Appl Math Lett 22:64–69
Jafari H, Tajadodi H (2015) Numerical solution of the fractional advection-dispersion equation. Progr Fract Differ Appl 1:37–45
Rao SB, Prajapati JC, Patel AD, Shukla AK (2014) Some properties of Wright-type generalized hypergeometric function via fractional calculus. Adv Differ Equ. doi:10.1186/1687-1847-2014-119
Zhang S (2009) Monotone iterative method for initial value problem involving Riemann–Liouville fractional derivatives. Nonlinear Anal 71:2087–2093
Kumar D, Singh J, Baleanu D (2016) Numerical computation of a fractional model of differential-difference equation. J Comput Nonlin Dyn 11(6):061004. doi:10.1115/1.4033899
Oldham KB, Spanier J (1974) The fractional calculus: integrations and differentiations of arbitrary order. Academic Press, New York
Caputo M (1967) Linear models of dissipation whose Q is almost frequency independent. Part II. J R Astron Soc 13:529–539
Samko SG, Kilbas AA, Marichev OI (1993) Fractional integrals and derivatives: theory and applications. Gordon and Breach, London
Carpinteri A, Mainardi F (1997) Fractional calculus in continuum mechanics. Springer, New York
Podlubny I (1999) Fractional differential equations. Academic Press, San Diego
Miller KS, Ross B (1993) An introduction to the fractional calculus and fractional differential equations. Wiley, New York
Khan NA, Ara A, Mahmood A (2010) Approximate solution of time fractional chemical engineering equations: a comparative study. Int J Chem React Eng. doi:10.2202/1542-6580.2156
Maraaba TA, Jarad F, Baleanu D (2008) On the existence and the uniqueness theorem for fractional differential equations with bounded delay within Caputo derivatives. Sci China Ser A Math 51:1775–1786
Rosenau P, Hyman JM (1993) Compactons: solitons with finite wavelength. Phys Rev Lett 70:564–567
Mihaila B, Cardenas A, Cooper F, Saxena A (2010) Stability and dynamical properties of Rosenau–Hyman compactons using Padè approximants. Phys Rev E. doi:10.1103/PhysRevE.81.056708
Bazeia D, Das A, Losano L, Santos MJ (2010) Traveling wave solutions of nonlinear partial differential equations. Appl Math Lett 23:681–686
Rus F, Villatoro FR (2007) Self-similar radiation from numerical Rosenau–Hyman compactons. J Comput Phys 227:440–454
Rus F, Villatoro FR (2007) Padè numerical method for the Rosenau–Hyman compacton equation. Math Comput Simul 76:188–192
Rus F, Villatoro FR (2009) A repository of equations with cosine/sine compactons. Appl Math Comput 215:1838–1851
Rus F, Villatoro FR (2008) Numerical methods based on modified equations for nonlinear evolution equations with compactons. Appl Math Comput 204:416–422
Molliq RY, Noorani MSM (2012) Solving the fractional Rosenau–Hyman equation via variational iteration method and homotopy perturbation method. Int J Differ Equ 2012. Article ID 472030
El-Tawil MA, Huseen SN (2012) The q-homotopy analysis method (q- HAM). Int J Appl Math Mech 8:51–75
El-Tawil MA, Huseen SN (2013) On convergence of the q-homotopy analysis method. Int J Contemp Math Sci 8:481–497
Liao SJ (1992) The proposed homotopy analysis technique for the solution of nonlinear problems. Ph.D. Thesis, Shanghai Jiao Tong University
Liao SJ (2003) Beyond perturbation: introduction to the homotopy analysis method. Chaoman and Hall/CRC Press, Boca Raton
He JH (1999) Homotopy perturbation technique. Comput Methods Appl Mech Eng 178:257–262
He JH (2003) Homotopy perturbation method: a new nonlinear analytical technique. Appl Math Comput 135:73–79
He JH (2006) New interpretation of homotopy perturbation method. Int J Mod Phys B 20:2561–2568
Khuri SA (2001) A Laplace decomposition algorithm applied to a class of nonlinear differential equations. J Appl Math 1:141–155
Khan Y, Wu Q (2011) Homotopy perturbation transform method for nonlinear equations using He’s polynomials. Comput Math Appl 61(8):1963–1967
Kumar D, Singh J, Kumar S (2015) A fractional model of Navier–Stokes equation arising in unsteady flow of a viscous fluid. J Assoc Arab Univ Basic Appl Sci 17:14–19
Kumar S, Kumar A, Kumar D, Singh J, Singh A (2015) Analytical solution of Abel integral equation arising in astrophysics via Laplace transform. J Egypt Math Soc 23(1):102–107
Khan M, Gondal MA, Hussain I, Karimi Vanani S (2012) A new comparative study between homotopy analysis transform method and homotopy perturbation transform method on semi-infinite domain. Math Comput Model 55:1143–1150
Kumar D, Singh J, Kumar S, Sushila (2014) Numerical computation of Klein-Gordon equations arising in quantum field theory by using homotopy analysis transform method. Alex Eng J 53(2):469–474
Yin XB, Kumar S, Kumar D (2015) A modified homotopy analysis method for solution of fractional wave equations. Adv Mech Eng 7(12):1–8
Keskin Y, Oturanc G (2010) Reduced differential transform method: a new approach to factional partial differential equations. Nonlinear Sci Lett A 1:61–72
Gupta PK (2011) Approximate analytical solutions of fractional Benney–Lin equation by reduced differential transform method and the homotopy perturbation method. Comput Math Appl 58:2829–2842
Srivastava VK, Awasthi MK, Tamsir M (2013) RDTM solution of Caputo time fractional-order hyperbolic telegraph equation. AIP Adv. doi:10.1063/1.4799548
Caputo M (1969) Elasticita e dissipazione. Zani-Chelli, Bologna
Kilbas AA, Srivastava HM, Trujillo JJ (2006) Theory and applications of fractional differential equations. Elsevier, Amsterdam
Clarkson PA, Mansfield EL, Priestley TJ (1997) Symmetries of a class of nonlinear third-order partial differential equations. Math Comput Modell 25(8–9):195–212
Acknowledgements
The authors are highly grateful to the referees for their invaluable suggestions and comments for the improvement of this article.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that there is no conflict of interests regarding the publication of this paper.
Rights and permissions
About this article

Cite this article
Singh, J., Kumar, D., Swroop, R. et al. An efficient computational approach for time-fractional Rosenau–Hyman equation. Neural Comput & Applic 30, 3063–3070 (2018). https://doi.org/10.1007/s00521-017-2909-8
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-017-2909-8