
Abstract
In this article, an internal model control plus proportional-integral-derivative (IMC–PID) tuning procedure for cascade control systems is proposed based on the gain and phase margin specifications of the inner and outer loop. The internal model control parameters are adjusted according to the desired frequency response of each loop with a minimum interaction between the inner and outer PID controllers, obtaining a fine tuning and the desired gain and phase margins specifications due to an appropriate selection of the PID controller gains and constants. Given the design specifications for the inner and outer loop, this tuning procedure adjusts the IMC parameter of each controller independently, with no interference between the inner and outer loop obtaining a robust method for cascade controllers with better performance than sequential tuning or other frequency domain-based methods. This technique is accurate and simple, providing a convenient technique for the PID tuning of cascade control systems in different applications such as mechanical, electrical or chemical systems. The proposed tuning method explained in this article provides a flexible tuning procedure in comparison with other tuning procedures because each loop is tuned simultaneously without modifying the robustness characteristics of the inner and outer loop. Several experiments are shown to compare and validate the effectiveness of the proposed tuning procedure over other sequential or cascade tuning methods; some experiments under different conditions are done to test the performance of the proposed tuning technique. For these reasons, a robustness analysis based on sensitivity is shown in this article to analyze the disturbance rejection properties and the relations of the IMC parameters.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Cascade control has been implemented in industry and different applications [3, 13, 16] due to their disturbance rejection, faster response and other advantages over single-loop control systems. Usually, they are tuned sequentially, the inner loop controller is tuned first to give a faster response than the outer loop, and then, the outer loop controller is tuned according to the resulting system.
Apart from sequential tuning, there are some control strategies that are suitable for cascade control design such as the internal model control (IMC) [18, 21, 22, 28, 34] and Smith predictor [7], due to their flexibility in the tuning parameters. These methods provide a better system response than sequential tuning due to the adjustment of the inner loop has minimum effects on the outer loop.
Tuning methods for proportional-integral-derivative (PID) controllers based on the frequency characteristics for single loop systems have some advantages over other methods due to the robustness parameter selection such as gain margin and phase margin [4, 9, 23] or the system sensitivity [33].
Exploiting the flexibility of the IMC due to its tuning parameter and the robustness characteristics of the frequency-based tuning algorithm, an IMC–PID/PID tuning method for cascade process with phase margin and gain margin specifications is proposed in this article.
There are limited tuning methods found in the literature related to the tuning of cascade process with frequency domain specifications, but with this approach, an appropriate tuning method for nested systems is developed, in which the robust design is necessary to avoid loop interaction in the adjustment procedure and obtain a system with disturbance rejection properties.
The methods based on relay tuning [8, 19] give a practical solution for this problem, but they do not give an analytical solution. Therefore, an analytical tuning formulae based on IMC–PID control are presented in this article. A second-order plus dead time model is employed on the inner loop SOPTD, and a first-order plus dead time model FOPTD is implemented in the outer loop.
The internal model controller parameters for the inner and outer loop are adjusted by the tuning formulae based on the gain margin and phase margin specification for each loop. The internal model controller for cascade process [10, 18, 21] is related to the frequency domain specifications by the gain margin and phase margin properties of feedback systems given by the characteristics of the frequency response. Therefore, the tuning parameters of the PID/PID controllers are adjusted, taking into account the effects on the sensitivity for each loop obtaining the required system response and the specified gains and phase margins. Apart from traditional tuning procedures for single loop and cascade control systems, there are some IMC strategies based on intelligent control and optimization such as [12] where an IMC controller design is performed using ARX —artificial neural networks—for MIMO nonlinear systems is presented; in Bin et al. [5], an IMC controller design with PLS (partial least square) is shown where a predictor is implemented to adjust the controller parameters to stabilize the process. Even when intelligent control strategies for similar problems are found in the literature, the classic control techniques are still in use and they are very useful as explained in this section; therefore, the proposed control strategy explained in this article is suitable for the independent tuning of cascade control systems.
The theoretical background of this technique is based on the internal stability properties of closed-loop systems [32] where a stabilizing controller is obtained based on the characteristics of the plant, but this model is extended to cascade control systems providing a convenient methodology for this kind of control architecture. The frequency domain tuning parameters, such as the gain margin and phase margin, allow the designer to select the relative stability characteristics of the cascade system with high accuracy, exploiting the properties of these parameters [20]. The main idea of the proposed control technique is based on pole/zero cancellation, taking into account that the IMC–PID controller works as a lead-lag compensator for the inner and outer loop [31] selecting the appropriate gains and time constants for each controller. Finally, the selected controllers provide robust closed loop systems [1] where the unmodeled dynamics do not affect the system response in a wide range of the IMC–PID controller parameters, which allow the designer to select the optimal controller ensuring robust stability and robust performance.
The explanations of the theory and development of this procedure are evinced in the rest of the article. In Sect. 2, a review of the previous related work is presented. In Sect. 3, the design of the internal model controller for parallel process is shown. In Sect. 4, the derivation of the frequency domain tuning formulae based on gain and phase margin is presented. In Sect. 5, a robustness analysis is done. In Sect. 6, simulations and analysis of several examples are developed. Finally, the conclusions of the obtained results are shown in Sect. 7.
2 Related work
As explained in the previous section, there are limited contributions found in the literature related to the proposed technique, but there is some related work for the independent tuning of cascade control systems; most of this work refers to the sequential tuning of each loop. Even when these tuning procedures are not designed for cascade control systems, they are an important theoretical background for this kind of nested architecture. A robust PID controller design for single loop system is found in Wang [31] where a gain and phase margin design procedure is presented based on optimization. Another tuning procedure based on this approach is found in Li [20] where a PID tuning procedure is designed based on nonlinear optimization, taking into account the phase margin, gain margin and bandwidth specifications. The tuning of PID controllers for cascade control systems is mainly done by two strategies: One of these is by the relay method [8] where even when this method is more practical than theoretical, an analytical solution could be approximated as shown [4]; the other strategy is based on the Smith predictor [7].
Some related work can be found in Kaya and Atherton [15], where an optimal controller tuning for cascade systems for FOPTD and SOPTD based on optimality is done. Another approach for the tuning of cascade control systems is shown in Alfaro et al. [2] where a cascade control system tuning technique for 2-DOF systems is designed. Another contribution in this field is shown in Visioli and Piazzi [30] where a disturbance rejection design is developed for the PID tuning of cascade control systems. As mentioned before, another strategy used is the Smith predictor [7], which is a popular control technique for this kind of architecture; in Kaya [14], there is another example of the tuning of cascade control systems with Smith predictor where some control strategies are proposed for this kind of systems.
Some authors propose PID tuning strategies implementing artificial intelligence techniques, which provides a flexible solution for some kinds of systems where the complexity of the problem does not allow the designer to use traditional techniques [24], which explains a tuning technique for cascade control systems using genetic algorithms. This method is useful when the system is too complex due to nonlinearities, but it could be applied in noncomplex systems. Another approach using artificial intelligence is found in Shenglin et al. [26], where an IMC–PID tuning technique for single loop controller with neural network is proposed; in this case, an adaptive controller is tuned with a neural network architecture. In Huang et al. [11], a tuning procedure for cascade systems using intelligent control strategies is shown, and a fuzzy logic tuning procedure is developed with a fuzzy PID-like controller. Even when these strategies are very innovative and useful, the tuning of PID cascade control systems with robustness parameters is still necessary, due to the effectiveness and flexibility of the relative stability parameters; especially, when a transfer function representation of the plant is obtained by experimentation or system identification, reducing the complexity of the problem.
3 Internal model design for cascade process
An IMC for a cascade process as shown in Fig. 1 is necessary before deriving the frequency-based tuning formulae. The IMC controller is based on the models proposed by Dola and Majhi [6], Lee and Park [18], Morari and Zafiriou [21], obtaining the tuning rules for the inner and outer loop of the cascade process.

Cascade control system
In Fig. 1, C 1(s) is the PID controller for the inner loop, G 1(s) is the process plant for the inner loop given as a second order plus time delay model (SOPTD), C 2(s) is the PID controller for the outer loop, G 2(s) is the process plant for the outer loop given as a first order plus time delay (FOPTD) model, including the disturbance inputs as standard cascade architecture.
The equivalent closed loop transfer function for the inner loop is shown in (1)
The equivalent closed loop transfer function for the outer loop is shown in (2)
Using the transfer function relations for the inner and outer loops, the respective IMC controllers are derived to satisfy the set point and disturbance rejection requirements.
3.1 IMC controller design for the inner loop
For the inner loop IMC–PID controller design, an optimal controller must be selected in order to minimize the error on a set point change and reduce the effects of the disturbances on the inner loop. The inner loop can be designed without interacting with the performance of the outer loop.
Consider the stable function G i (s) [21], where i = 1 denotes the inner loop transfer function and i = 2 denotes the outer loop transfer function.
where
H denotes complex conjugate.
G iM(s) has the invertible part of the model, and G iA(s) include all the right half plane zeros and delays of G i (s).
The feedback controller of the inner loop is given by (6) as defined in Lee and Park [18], Morari and Zafiriou [21] where q 1 is the IMC controller and it is \({\mathcal{H}}_{2}\) optimal for a particular input.
Based on the inner loop error, set point and disturbance input, the variable \(\tilde{q}_{1}\) is obtained and then augmented by a filter as shown in (7), (8) and (9)
where the filter
λ 1 and n must be selected to ensure that the IMC controller is proper. λ 1 adjusts the speed of the closed response in the inner loop. Later, this parameter λ 1 will be adjusted according to the gain and phase margin specifications of the inner loop, resulting in a convenient tuning method.
The main objective of the feedback controller of the inner loop is to follow the desired closed loop response [18] obtained from (1) and shown in (10)
Then, the feedback controller of the inner loop is obtained from (6) to meet the requirements of (10)
Based on (11), the IMC–PID controller rules will be derived, obtaining the formulae for the gains and constants of the inner loop feedback controller that will be used in the tuning method based on gain and phase margin specifications.
3.2 IMC controller design of the outer loop
The IMC controller design of the outer loop is done in a similar fashion as the inner loop. The desired closed loop response of the inner loop must be considered in the design of the outer loop controller. Then, the process of the outer loop, as shown in Fig. 1, is given by G p2(s)
G p2(s) can be partitioned into two portions, similar as G 1(s), where G p2M(s) has the invertible part of the model and G p2A(s) include all the right half plane zeros and delays of G p2(s).
The feedback controller C 2(s) for the outer loop can be designed without effects on the closed loop performance. C 2(s) is defined by (13)
Based on the outer loop error, set point and disturbance input, the variable \(\tilde{q}_{2}\) is obtained and then augmented by a filter as shown in (14), (15) and [16, 17]
where the filter
λ 2 is the IMC parameter of the outer loop that will be adjusted later according to the gain and phase margin specifications. The speed of response of the closed loop cascade control system can be adjusted with λ 2, but as it is explained later in this article, there is a minimum interaction between the inner and outer loop.
The feedback controller C 2(s) of the outer loop is designed to follow the desired closed loop response [18] obtained from (2) and given in (17)
The feedback controller for the outer loop is obtained from (13) following the desired closed loop response given in (17) and the equivalent cascade process set point settings. C 2(s) is given in (18)
With C 2(s), the IMC controller for the outer loop can be approximated by a PID controller, obtaining the gains and constants dependent of the IMC parameters which will be used for the PID controller tuning according to the frequency domain specifications.
The disturbance rejection and set point tracking of the inner and outer loop depend on the adjustment of the IMC parameters according to the frequency domain specifications of the controllers C 1(s) and C 2(s).
3.3 IMC–PID controller design
The IMC–PID controller design of the inner loop is done based on the SOPTD model approximation of G 1(s), which can be obtained by the half rule [27]. The SOPTD is described in (19)
where θ 1 is the delay of the process, K 1 is the gain, and τ 1 and τ 2 are the respective time constants.
Applying (11) for the feedback controller and using the Taylor series expansion of \(e^{{ - \theta_{1} s}}\) [27] yields the IMC–PID controller for the inner loop C 1(s)
where the IMC–PID’s gain and constants of the of the inner loop are given by (21)–(23)
The IMC–PID outer loop controller is designed based on the feedback controller for C 2(s) described in (18). For the system G 2(s), an FOPTD model is used approximated by the half rule [27].
Then, in order to follow the closed loop response of the outer loop, an equivalent transfer function G p2(s) for the outer loop must be obtained from (12) as shown in (25)
Applying the portions G p2M and G p2A in the feedback controller for the outer loop C 2(s) described in (18) yields the IMC–PID controller of the outer loop, where the gains and constants can be obtained for the design of the frequency response-based method.
The feedback controller C 2(s) is shown in (26)
where the gain and constants of the IMC–PID controller of the outer loop are as follows:
Based on the IMC–PID controllers defined for the inner and outer loop, the tuning rules with gain and phase margin specifications can be derived because of the relations of the controller parameters in the frequency domain as explained in the next section.
4 Tuning procedure for cascade process based on gain and phase margin specifications
As explained in the previous section, there are limited tuning methods for cascade process described in the literature and even less, those related to frequency domain specifications. IMC for cascade process offers some advantages over other methods for the tuning of cascade systems, due to the flexibility of the IMC parameters. For this reason, their frequency domain characteristics are implemented to get a flexible tuning method.
This tuning method is based on the gain and phase margin properties of feedback systems, given by the Nyquist theorem and according to the crossover frequencies of the inner and outer loop. Applying these properties and analyzing the maximum sensitivity on each loop, a fine tuning formulae can be obtained for the inner and outer loop, adjusting the IMC parameters based on the frequency response parameters. In the following subsections, the derivation of the tuning formulae for the inner and outer loop will be explained.
4.1 Derivation of the tuning procedure for the inner loop
The frequency domain properties of the inner loop [9, 10, 20] for the gain and phase margins are defined in (30)–(33), where i = 1 denotes the controller and transfer function for the inner loop and i = 2 denotes the controller and plant of the outer loop.
where A m1 is the gain margin of the inner loop, ϕ m1 is the phase margin of the inner loop, and ω p1 and ω g1 are the crossover frequencies for the inner loop.
The PID feedback controller for the inner loop has the form defined in (20), and the plant transfer function G 1(s) is defined in (19)
The obtained formulae for the IMC tuning parameter and the crossover frequencies ω p1 and ω g1 for the inner loop are given by (60) and (61) in Appendix 1. The IMC parameter in terms of the gain margin A m1 is given by
The parameter λ 1 is found according to the desired crossover frequency and gain margin. The desired phase margin is obtained in accordance with the sensitivity of the inner loop (63) as shown in Appendix 1, where the derivations of the controller parameters are described.
The requirements for the IMC–PID tuning method of the inner loop are a phase margin A m1 and a phase margin ≥ϕ m1, Appendix 1.
4.2 Derivation of the tuning procedure for the outer loop
The derivation of the tuning procedure for the outer loop is done considering the frequency domain properties of the gain and phase margins for the equivalent close loop process. This frequency domain tuning method for the outer loop allows selecting an independent IMC parameter value from the inner loop, obtaining a very accurate frequency response for the cascade process. This is a very important consideration related to the robustness of the cascade system that is very difficult to manipulate with other control techniques for similar control systems or even sequential tuning.
In order to design the tuning method for the outer loop, the equivalent process G p2(s) (25) must be considered. The frequency domain properties of the outer loop [9, 10, 20] for the gain and phase margin are defined by (30)–(33), where i = 2 denotes the controller and plant of the outer loop.
A m2 is the gain margin of the outer loop, ϕ m2 is the phase margin of the outer loop, and ω p2 and ω g2 are the crossover frequencies.
The PID controller for the outer loop C 2(s) is represented by (36)
The IMC parameter for the outer loop λ 2 is shown in (37) and the respective crossover frequencies ω p2 and ω g2 are shown in (72) and (73) in Appendix 2.
The IMC parameters λ 1 and λ 2 are now adjusted according to the desired gain margins and phase margins at a specified crossover frequencies. These IMC parameters give the required values of the gains and constants of the feedback controllers, adjusted to give the required frequency response for the inner and outer loop without tuning or detuning the feedback controllers of the cascade process sequentially.
5 Robustness analysis
In the previous section, the sensitivity of the closed loop system for the inner and outer loop was used to establish a bound for the phase margin for each loop. The sensitivity function provides information about the robustness of the control systems in terms of the relative stability, especially, when the system is tuned with frequency domain specifications. As it was explained before, the IMC parameters for each loop are adjusted based on the gain and phase margin specifications for each loop; therefore, the robustness analysis is done to test the robust stability and robust performance on each loop for different gain margins specifications. The IMC controller tuning based on frequency domain specifications is analyzed due to uncertainties of the model that interfere the performance of the system.
The complementary sensitivity function of the inner loop is used in the robust stability analysis [21, 31, 35], and it is defined in (38)
For the feedback controller C 1(s) and process plant G 1(s), the IMC controller gains and constants are given by the formulae in the previous section, and the IMC parameter is adjusted according to the frequency domain specifications.
The inner loop feedback system is robustly stable [21, 35] if
Where the uncertainty \(\bar{\ell }_{m1}\)is given by the set of stable plants described by:
where \(\tilde{G}_{1} \left( {j\omega } \right)\) is the nominal plant of the inner loop.
Robust stability establishes that a given controller C 1(s) stabilizes the nominal plant \(\tilde{G}_{1} \left( {j\omega } \right)\) if the condition (39) is met.
For the outer loop, the robust stability is also analyzed, obtaining a complementary sensitivity function with the equivalent process model G p2(s) and the feedback controller C 2(s).
The IMC parameter is adjusted according to the frequency domain specifications of the outer loop and the equivalent cascade process.
The robust stability bound for the outer loop is given by:
where the uncertainty \(\bar{\ell }_{m2}\) is given by the set of stable plants described by:
\(\tilde{G}_{p2} \left( {j\omega } \right)\) is the nominal plant of the inner loop.
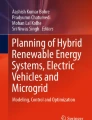
In Figs. 2 and 3, the robust stability bound plots for the inner and outer loop are shown. In Fig. 2 is plotted the robust stability bound for the inner loop with different values of the delay constant θ 1 and the IMC parameter λ 1 adjusted by the desired gain margin range. As can be noticed, the minimum peaks occur on the relatively low values of λ 1 which is proportional to the gain margin of the inner loop A m1. Analyzing Fig. 2, the range \(\frac{{\lambda_{1} }}{{\theta_{1} }} > 0.3\) and the gain margin A m1 is the allowed region where stable controllers for the nominal process of the type \(\bar{\ell }_{m1}\), can be obtained.

Robust stability margin for the inner loop

Robust stability margin for the outer loop
The robust stability bound for the outer loop with different values of θ 1 and θ 2 is shown in Fig. 3. The IMC parameter λ 2 is adjusted according to the gain margin specification of the outer loop A m2, and as shown in Fig. 3, there is a minimum interaction on the robust stability of the inner and outer process due to the independence of their IMC parameters λ 1 and λ 2. The minimum peaks for robust stability of the outer loop occur at relative low values of λ 2, and the range is approximately \(\frac{{\lambda_{2} }}{{(\theta_{1} + \theta_{2} )}} > 0.8\), which depends on the specification parameter A m2. The robust stability bounds for the outer loop are smaller than the robust stability bounds for the inner loop, but for both loops, they are optimal and provide robustly stable controllers for the cascade process under uncertainties.
Although robust stability is the minimum requirement for the cascade systems under uncertainties, the robust performance of the inner and outer loop is considered for this analysis.
For the inner loop, the bound that guarantees robust performances for an \({\mathcal{H}}_{\infty }\) PID controller is [21, 35]
where \(S_{1} (j\omega )\) is the sensitivity function defined in (63) (Appendix 1) and \(W_{1} (j\omega )\) is a weighting function that in this case, a Butterworth filter is selected as shown in (45)
The closed loop system met the following condition
where W 1(s) is selected based on the \({\mathcal{H}}_{2}\) optimal sensitivity function with a specific input.
Robust performance of the inner loop assumes robust stability of the inner loop, and the robust performance bound depends on the IMC parameter λ 1 adjusted by the gain margin specifications.
The bound that guarantees robust performance for the outer loop is
where \(S_{2} (j\omega )\) is the sensitivity function defined in Appendix 2 (75) and \(W_{2} (j\omega )\) is a weighting function, and it is selected as a Butterworth filter as shown in (48)
The closed loop system met the following condition
In Fig. 4, the robust performance bound for the inner loop is shown, for different values of λ 1 and the time delay constant θ 1. The minimum robust performance peaks are found for relatively high values of λ 1, in the range of \(\frac{{\lambda_{1} }}{{\theta_{1} }} > 1.5\), as it depends on the gain margin specification of the inner loop. It can be noticed the relation between the robust stability and robust performance, because the robust performance depends on the robust stability bound.

Robust performance bound for the inner loop
In Fig. 5, the robust performance for the outer loop is shown, for different values of λ 2 and the time delay constants θ 1 and θ 2. The minimum robust performance bounds for the outer loop occur at relatively low values of λ 2 depending on the gain margin specifications of the inner loop, in the range of \(\frac{{\lambda_{2} }}{{(\theta_{1} + \theta_{2} )}} > 0.8\). As in the case of robust stability, the robust performance bounds for the inner and outer loops are independent and do not mutually affect their performance. The robust performance bound for the outer loop is slightly lower than the bounds for the inner loop obtaining a better equivalent cascade process performance with uncertainties.

Robust performance bound for the outer loop
It is clear that with this tuning method, it is possible to design controllers for the inner and outer loop, which meets the robustness requirements. Basically, selecting the appropriate gain and phase margin specifications for both loops according to the robustness requirements related to the IMC parameters, the specified robust controllers for both loops are obtained.
6 Numerical examples and discussion
In order to verify the performance of the proposed tuning procedure, an illustrative example is shown in this section with an analysis of the results and the employed methodology.
In this example, the proposed method is compared with other frequency domain-based methods, and the objective of this example is to implement three tuning procedures and the proposed one to test their performance when a desired set point needs to be tracked and when there are disturbances on the system. Then, a comparison of the three tuning methods for cascade process [4, 25, 29] with the proposed procedure is done examining their system response, robustness and relative stability.
The transfer functions for the inner and outer loops are as follows:
Approximated by a SOPDT and FOPDT models, respectively, using the half rule
The IMC controller used in the benchmark of this example use the IMC formulae from Morari and Zafiriou [21] and is tuned according to the robustness chart as mentioned [29]. The other tuning procedures are explained in Sanchis et al. [25] and Åström and Hägglund [4] where the design parameters for the cascade control system are shown in Tables 1 and 2 for the inner and outer loop, respectively.
The desired gain and phase margin with the proposed method for the inner and outer loop are shown in Tables 1 and 2.
The integral of the time-weighted error (ITAE) is implemented to measure the error signal when a set point has to be followed; therefore, the performance of every controller is analyzed. This performance index is shown in (54)
The resulting step response for the proposed and the other tuning procedures [4, 25, 29] is shown in Fig. 6 where the performance of the proposed method is better due to the smaller overshoot and settling time. The disturbance response for d 1 and d 2 are shown in Fig. 7 and Fig. 8 where the system tuned with the proposed method has a smaller overshoot and better performance in comparison with the other tuning procedures as shown in the following analysis. The obtained IMC parameters for the inner and outer loop λ 1 = 0.0455 and λ 2 = 0.1842 then the controller parameters are found by (21)–(23) and (27)–(29), respectively.

Step response

Closed loop response when a disturbance is applied on d1

Closed loop response when a disturbance is applied on d2
In Tables 1 and 2, the resulting gain margin and phase margin for the inner and outer loop are shown, where the proposed method gives more accurate results of gain and phase margin for the inner and outer loop in comparison with the other tuning procedures shown in this example. Although the method [29] yields the maximum sensitivity result for the outer closed loop system, the proposed method yields a smaller ITAE, as shown in Table 3, and the outer closed loop system has a small sensitivity M s in comparison with the other tuning procedures, as confirmed in Fig. 9. This relation between the ITAE and the sensitivity M s is very common in different control systems; this means that a higher sensitivity implies a lower ITAE and vice versa, as shown in Tables 1, 2 and 3. It is important to notice that the tuning procedure of Åström and Hägglund [4] and Sanchis et al. [25] is precise in the frequency response specifications, but they yield a higher ITAE, as shown in Table 3, than the other tuning procedures.

Robustness analysis of the overall cascade process
7 Conclusions
In this paper, an IMC tuning method based on gain and phase margin specifications for cascade control systems has been presented. The gain and phase margin specifications for the inner and outer loop are selected independently by the designer, and there is a negligible interaction between the closed loop characteristics of each loop due to the adjustment of the IMC parameters according to the frequency domain specifications. One of the characteristics of the frequency domain methods for single loops is that the system can be designed in terms of robustness specifications, with this proposed tuning method, the cascade control process can now be tuned with robustness properties according to their sensitivity and frequency domain specifications, and as it was shown in this article, it provides excellent robust stability and robust performance bounds.
There are limited tuning methods found in the literature for cascade control systems, and sequential tuning is the recommended procedure for this kind of systems. Some methods, especially frequency domain-based methods, are suitable for cascade systems, but there are other methods which are difficult to apply. The tuning method proposed in this paper yields very accurate frequency domain specifications, provides a wide range of gain and phase margin values before the cascade system becomes unstable and has low performance index values for the system response and excellent disturbance rejection in comparison with other tuning methods.
Future work aims toward the design of PID controllers with other control techniques in the frequency domain, like loop shaping, for cascade control systems. Apart from this strategy, future research will be oriented to the analysis and design of PID controllers with robust specifications like sensitivity-based controllers for cascade control systems. Finally, the analysis of other effects on PID cascade control systems will be studied, like the effects on the system with saturated inputs and other nonlinearities that can be found in electrical, mechanical and other kind of systems.
References
Adegbege AA, Heath WP (2010) Stability conditions for constrained two-stage internal model control. In: 49th IEEE conference on decision and control (CDC), 2010 Atlanta, GA, U.S.A., IEEE, pp 5251–5256
Alfaro VM, Vilanova R, Arrieta O (2008) Two-degree-of-freedom PI/PID tuning approach for smooth control on cascade control systems. In: 47th IEEE conference on decision and control, 2008. CDC 2008. Cancun, Mexico, IEEE, pp 5680–5685
Alfaro VM, Vilanova R, Arrieta O (2009) Robust tuning of two-degree-of-freedom (2-DoF) PI/PID based cascade control systems. J Process Control 19(10):1658–1670
Åström KJ, Hägglund T (1984) Automatic tuning of simple regulators with specifications on phase and amplitude margins. Automatica 20(5):645–651
Bin H, Pingyou Z, Jun L (2010) Multi-loop internal model controller design based on a dynamic PLS framework. Process Syst Eng 18(2):277–285
Dola GP, Majhi S (2012) Synthesis of PID tuning for a new parallel cascade control structure. Adv PID Control 2(1):566–571
Garcia P, Santos T, Normey-Rico JE, Albertos P (2010) Smith predictor based control schemes for dead-time unstable cascade process. Ind Eng Chem Res 49(22):11471–11481
Hang CC, Loh AP, Vasnani VU (1994) Relay feedback auto-tuning of cascade controllers. IEEE Trans Control Syst Technol 2(1):42–45
Ho WK, Hang CC, Zhou J (1997) Self-tuning PID control of a plant with under-damped response with specifications on gain and phase margins. IEEE Trans Control Syst Technol 5(4):446–452
Ho WK, Lee TH, Han HP, Hong Y (2001) Self-tuning IMC–PID control with interval gain and phase margins assignment. IEEE Trans Control Syst Technol 9(3):535–541
Huang C, Bai Y, Li X (2010) Simulation for a class of networked cascade control systems by PID control. In: 2010 International conference on networking, sensing and control (ICNSC), IEEE, pp 458–463
Hu B, Zhao Z, Liang J (2012) Multi-loop nonlinear internal model controller design under nonlinear dynamic PLS framework using ARX-neural network model. J Process Control 22(1):207–217
Jeng JC, Lee MW (2012) Simultaneous automatic tuning of cascade control systems from closed-loop step response data. J Process Control 22(6):1020–1033
Kaya I (2001) Improving performance using cascade controller and a Smith predictor. ISA Trans 40(3):223–234
Kaya I, Atherton DP (2005) Improved cascade control structure for controlling unstable and integrating processes. In: 44th IEEE conference on decision and control, 2005 and 2005 European control conference. CDC-ECC ‘05 Seville, Spain, IEEE, pp 7133–7138
Kaya I, Tan N, Atherton DP (2005) Improved cascade control structure and controller design. In: 44th IEEE conference on decision and control, 2005 and 2005 European control conference. CDC-ECC ‘05 Seville, Spain, IEEE, pp. 3055–3060
Kaya I, Tan N, Atherton DP (2007) Improved cascade control structure for enhanced performance. J Process Control 17(1):3–16
Lee Y, Park S (1998) PID controller tuning to obtain desired closed loop responses for cascade control systems. Ind Eng Chem Res 37(5):1859–1865
Leva A, Donida F (2009) Autotuning in cascaded systems based on a single relay experiment. J Process Control 19(5):896–905
Li K (2013) PID tuning for optimal closed-loop performance with specified gain and phase margins. IEEE Trans Control Syst Technol 21(3):1024–1030
Morari M, Zafiriou E (1989) Robust process control. Prentice Hall, Englewood Cliffs, NJ
Padhan DG, Majhi S (2013) Enhanced cascade control for a class of integrating processes with time delay. ISA Trans 52(1):45–55
Paraskevopoulos PN, Pasgianos GD, Arvanitis KG (2006) PID-type controller tuning for unstable first order plus dead time processes based on gain and phase margin specifications. IEEE Trans Control Syst Technol 14(5):926–936
Sadasivarao MV, Chidambaram M (2006) PID Controller tuning of cascade control systems using genetic algorithm. J Indian Inst Sci 86(4):343–354
Sanchis R, Romero JA, Balaguer P (2010) Tuning of PID Controllers based on simplified single parameter optimization. Int J Control 83(9):1785–1798
Shenglin M et al. (2009) Intelligent IMC–PID control for ultrasonic motor. In: ICCAS-SICE, 2009 Fukuoka International Congress Center, Japan, IEEE, pp 1911–1915
Skogestad S (2003) Simple analytic rules for model reduction and PID controller tuning. J Process Control 13(4):291–309
Song S, Cai W, Wang Y-G (2003) Auto-tuning of cascade control systems. ISA Trans 42(1):63–72
Tan W, Liu J, Chen T, Marquez HJ (2005) Robust analysis and PID tuning of cascade control systems. Chem Eng Commun 192(9):1204–1220
Visioli A, Piazzi A (2006) An automatic tuning method for cascade control systems. In: Computer aided control system design, 2006 IEEE international conference on control applications, 2006 IEEE international symposium on intelligent control, 2006 IEEE Munich, Germany, IEEE, pp 2968–2973
Wang Y-J (2012) Tuning of optimal and robust PID controller for open-loop unstable first-order plus time delay systems. In: 31st Chinese control conference (CCC), 2012 Hefei, China, IEEE, pp 2459–2464
Xi-Song C, Cong G, Jun Y (2011) Simulation and experimental studies of disturbance observer enhanced internal model control. In: 30th Chinese control conference (CCC), 2011 Yantai, China, IEEE, pp 3830–3833
Yaniv O, Nagurka M (2004) Design of PID controllers satisfying gain margin and sensitivity constraints on a set of plants. Automatica 40(1):111–116
Yi S, Nelson PW, Ulsoy AG (2011) PI control of first order time-delay systems via eigenvalue assignment. In: American control conference (ACC), 2011 San Francisco, CA, USA, IEEE, pp 4213–4218
Zhang W, Xi Y, Yang G, Xu X (2002) Design PID controllers for desired time-domain or frequency-domain response. ISA Trans 41(4):511–520
Author information
Authors and Affiliations
Corresponding author
Appendices
Appendix 1
The derivations of the inner loop IMC parameters are obtained by substituting (19) and (20) in (30)–(33) obtaining
Therefore, the relations of the gain and phase margin with the controller parameters are obtained. These equations provide all the relations between the gain and phase margin and their respective crossover frequencies, necessary for the design of the IMC–PID tuning method for the inner loop feedback controller.
Substituting the IMC–PID gains and constants for the feedback controller C 1(s) defined in (21)–(23) yields
With the crossover frequency ω p1
And
The IMC parameter in terms of the gain margin A m1 is given by
The IMC parameter λ 1 is now adjusted according to the desired gain margin and phase margin specifications. The resulting inner loop feedback system is tuned independently of the outer loop, and the robustness requirements can be analyzed with the sensitivity peak of the inner given in (63)
The gain margin of the inner loop process can be defined in terms of the maximum sensitivity peak as
A lower bound for the phase margin of the inner loop tuning method can be established using the relation between the phase margin and the maximum sensitivity peak given in (64)
Using (64) and the crossover frequency ω p1 (60), the lower bound for the phase margin ϕ m1 is given by
Appendix 2
The outer loop IMC parameters are obtained by substituting (25) and (36) in the properties of the gain and phase margin (30)–(33) with i = 2 yields
Substituting the IMC–PID gains and constants for the feedback controller C 2(s) described in (27)–(29) yields the following relations
With the crossover frequency ω p2
And
The tuning parameter of the IMC–PID controller for the outer loop λ 2 is adjusted in terms of the specified gain margin for the outer loop, and as it can be seen, this tuning parameter is independent of the tuning parameters of the inner loop, so as it can be seen on the following section, the calculated values for the tuning parameters for λ 1 and λ 2 yield an independent frequency domain controller design methodology for the inner and outer loop taking into account the robustness considerations.
The controller parameter λ2 is adjusted by the formulae (74)
The bounds for the gain and phase margin for the tuning method of the outer loop can be obtained from the maximum sensitivity peak of the equivalent cascade process. For the outer loop, the gain and phase margin relations of the tuning method obtained from the maximum sensitivity peak of the equivalent cascade process are derived from the equivalent system C 2(s)G p2(s) as it is shown in (75)
Then, the gain margin in terms of the maximum sensitivity peak is given by
The phase margin lower bound for the tuning method of the outer loop in terms of the maximum sensitivity peak is given by
Using (76) and ω p2 described in (72), the lower bound for the phase margin of the inner loop feedback controller is as follows:
Rights and permissions
About this article
Cite this article
Azar, A.T., Serrano, F.E. Robust IMC–PID tuning for cascade control systems with gain and phase margin specifications. Neural Comput & Applic 25, 983–995 (2014). https://doi.org/10.1007/s00521-014-1560-x
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-014-1560-x