
Abstract
In this paper, we develop multi-layer feed-forward artificial neural network (MFANN) models for predicting the performance measures of a message-passing multiprocessor architecture interconnected by the simultaneous optical multiprocessor exchange bus (SOME-Bus), which is a fiber-optic interconnection network. OPNET Modeler is used to simulate the SOME-Bus multiprocessor architecture and to create the training and testing datasets. The performance of the MFANN prediction models is evaluated using standard error of estimate (SEE) and multiple correlation coefficient (R). Also, the results of the MFANN models are compared with the ones obtained by generalized regression neural network (GRNN), support vector regression (SVR), and multiple linear regression (MLR). It is shown that MFANN models perform better (i.e., lower SEE and higher R) than GRNN-based, SVR-based, and MLR-based models for predicting the performance measures of a message-passing multiprocessor architecture.
Similar content being viewed by others


Explore related subjects
Discover the latest articles, news and stories from top researchers in related subjects.Avoid common mistakes on your manuscript.
1 Introduction
Parallel computing is the simultaneous use of multiple compute processing units to solve a computational problem. Parallel computing takes hold in many areas of mainstream computing [1]. Some important domains for parallel computing today include scientific applications which model physical phenomena; engineering applications such as those in computer-aided design, digital signal processing, automobile crash simulation, and even simulations used to evaluate architectural tradeoffs; graphics and visualization applications that render scenes or volumes into images; media processing applications such as image, video and audio analysis and processing, speech and handwriting recognition; information management applications such as databases and transaction processing; optimization applications such as crew scheduling for an airline and transport control; artificial intelligence applications such as expert systems and robotics; multiprogrammed workloads; and the operating system itself, which is a particularly complex parallel application [2].
Developing parallel applications that are robust and provide good speed-up across current and future multiprocessors is a critical task and requires a tremendous amount of computational power, in addition to a deep understanding of forces driving parallel computers. Essentially, parallel computer architecture has matured to the point where it needs to be studied from a basis of engineering principles and quantitative evaluation of performance and cost. Parallel programming models are evolving apace and can truly utilize large-scale parallel computing systems. Several parallel programming models exist in common use [3], and message passing and shared-memory programming models are the most popular ones. In the message-passing model, a set of nodes use their own local memory during computation. Nodes exchange data through communications by sending and receiving messages, and data transfer usually requires cooperative operations to be performed by each process. The drawback of message passing is the programmer’s responsibility for determining and orchestrating all parallelism. In the shared-memory-programming model, tasks share a common address space, which they read and write asynchronously. An advantage of this model is that the notion of data “ownership” is lacking so there is no need to specify explicitly the communication of data between tasks, therefore program development can often be simplified [4–6].
The performance analysis of a multiprocessor architecture is a very crucial factor in designing message passing and shared-memory multiprocessor systems. Very often, simulation is the only feasible method because of the nature of the problem and because analytical techniques become too difficult to handle. Simulation occurs at many levels, from circuit to system, and at different degrees of detail as the design evolves. Execution-driven and trace-driven multiprocessor simulations have been extensively used to obtain a reliable and accurate prediction of the final design. One of the problems with simulation is that although these simulations can be done at a high level of abstraction, they still are extremely time consuming. There are several reasons why this is the case. First, the benchmarks that need to be simulated typically consist of several hundreds of billions of dynamically executed instructions. Second, multiple of these benchmarks need to be simulated to cover a representative set of applications. Third, the complexity of the target system reflects itself in the complexity of the simulator making the simulator at least four orders of magnitude slower than native hardware execution. Fourth, during design space exploration, all benchmarks need to be simulated multiple times to identify the optimal design for a given cost function covering performance, power, area, cost, and reliability [7].
With the objective of reducing simulation time without losing accuracy, some interesting proposals have appeared in the last years. The first one is the sampled simulation, which chooses in an intelligent way a small portion of the program trace to simulate [7]. The second one is using a reduced set of the inputs of a benchmark [7]. Finally, there is statistical modeling and simulation, which characterizes the behavior of the program and architecture with some probability distributions [8, 9]. A statistical simulation is a robust, flexible, and suitable tool in multiprocessor design, but it can still be time consuming especially when multiprocessor systems to be simulated have many parameters and these parameters have to be tested with different probability distributions or values.
There exist three studies in literature [7, 9, 10], which prove the fact that artificial intelligence techniques could be applied to predict the performance measures of a multiprocessor architecture. In [7], a broadcast-based multiprocessor architecture called the SOME-Bus employing the distributed shared-memory programming model was considered. The statistical simulation of the architecture was carried out to generate the dataset. The dataset contained the following variables: ratio of the mean message channel transfer time to the mean thread run time (T/R), probability that a block can be found in modified state (P m ), probability that a data message is due to a write miss (P w ), probability that a cache is full (P cf), and probability of having an upgrade ownership request (P uor). SVR was used to build prediction models for predicting average network response time (NRT), average channel waiting time (CWT), and average processor utilization (PU). It was concluded that SVR model is a promising tool for predicting the performance measures of a distributed shared-memory multiprocessor.
In [9] and [10], MFANN models were developed to predict the measures of the SOME-Bus architecture employing the message-passing protocol with (ACK’s), and the hybrid message-passing protocols. The performance of the models was evaluated by calculating the mean absolute error (MAE), root mean squared error (RMSE), relative absolute error (RAE), and root relative squared error (RRSE). The results of the MFANN-based models were compared with the ones obtained by GRNN, SVR, and MLR. It is concluded that MFANN models shortens the time quite a bit for obtaining the performance measures of a message-passing multiprocessor employing the message-passing protocol with ACK’s and can be used as an effective tool for this purpose.
The difference between this study and [10] is that the dataset used in [10] is a hybrid one in the sense it includes simulation results both for message passing with acknowledgments (ACK’s) and without ACK’s. This study uses the dataset which includes simulation results for message passing with ACK’s only. This study extends our previous work [9] by including three new methods (i.e., SVR, GRNN, and MLR) for performance measures prediction.
In this paper, MFANNs have been used to predict the performance measures of the SOME-Bus architecture employing the message-passing programming model with ACK’s. OPNET Modeler [11] is used to statistically simulate the message-passing SOME-Bus architecture. The input variables of the prediction model include T/R, node number, thread number, and traffic pattern. The output variables of the prediction model include average CWT, average channel utilization (CU), average NRT, average PU and average input waiting time (IWT). The performance of the prediction models have been evaluated by calculating their SEE and R values. The results are compared with the ones obtained by GRNN, SVR, and MLR. It is shown that MFANNs perform better than GRNN, SVR, and MLR analysis for predicting the performance measures of a message-passing multiprocessor architecture.
This paper is organized as follows. Section 2 gives an overview of the SOME-Bus architecture. Section 3 presents details of message-passing protocol. Section 4 summarizes the basics of MFANNs, GRNN, SVR, and MLR. Section 5 describes the simulation framework and dataset generation. Section 6 gives the MFANN prediction models, performance metrics, results, and discussion. Finally, Sect. 7 concludes the paper and outlines the future work.
2 Overview of the simultaneous optical multiprocessor exchange bus (SOME-Bus)
One implementation of an architecture which can support simultaneous multicasts from all nodes has been presented in [12]. This architecture, called the SOME-Bus, incorporates optoelectronic devices into high-performance network architecture. The unique architecture of the SOME-Bus provides for strong integration of the transmitter, receiver, and cache controller hardware to produce a highly integrated system-wide coherence mechanism. It is a low-latency, high-bandwidth, fiber-optic network which directly connects each processing node to all other nodes without contention. One of its key features is that each of N nodes has a dedicated broadcast channel which can operate at GBytes/s, depending on the configuration. Figure 1 depicts the fully connected SOME-Bus network architecture. The receiver array does not need to perform any routing, and consequently its hardware complexity is small. It contains an optical interface which performs address filtering, length monitoring, and type decoding. If a valid address is detected in the message header, the message is placed in a queue, otherwise the message is ignored. The address filter can recognize broadcast addresses in addition to recognizing the address of the home node. The receiver array also contains a set of queues such that one queue is associated with each input channel, allowing messages from any number of nodes to arrive and be buffered simultaneously. This organization supports multiple simultaneous broadcasts.

Parallel receiver array
Messages exchanged between nodes contain a header field with information on the message type (data or synchronization), length, and destination address. Once the logic level signal is restored from the optical data, it is directed to the input channel interface, which consists of two parts: the optical interface, which includes physical signaling, address filtering, length monitoring, and type decoding and the processor interface, which includes a routing network and a queuing system. One queue is associated with each input channel, allowing messages from any number of processors to arrive and be buffered simultaneously, until the local processor is ready to remove them. Arbitration may be required only locally in a receiver array when multiple input queues contain messages.
The SOME-Bus may appear to be equivalent to a mesh, but it has much more functionality. It avoids the latency of arbitration, switching setup, and informing the sending node that the connection is complete. The ability to support multiple simultaneous broadcasts is a unique feature of the SOME-Bus, which efficiently supports distributed barrier synchronization mechanisms and cache consistency protocols.
3 Message-passing protocol
A message-passing system typically combines the local memory and processor at each node of the interconnection network. There is no global memory so it is necessary to move data from one local memory to another by means of message-passing paradigm. This is typically done by a Send/Receive pair of commands, which must be written into the application software by a programmer. Thus, programmers must learn its complicated paradigm which involves data copying and dealing with consistency issues accurately. Simultaneous message processing and problem calculating are handled by the underlying operating system and protocols. Processes running on a given processor use mean named internal channels to exchange messages among themselves. Processes running on different processors use the external channels to exchange messages. Data exchanged among processors cannot be shared; it is rather copied (using send/receive messages). An important advantage of this form of data exchange is the elimination of the need for synchronization constructs, such as semaphores, which results in performance improvement. In addition, a message-passing scheme offers flexibility in accommodating a large number of processors [13].
The basic programming model used in message-passing architectures is based on the idea of matching a send request on one processor with a receive request on another. In such scheme, send and receive are blocking; that is, send blocks until the corresponding receive is executed before data can be transferred. Message-passing communication protocol supports end-to-end packet acknowledgment. For every packet sent by a source node, there is a returned ACK’s after the packet has reached the destination node. This allows source nodes to discover packet loss. Automatic retransmission of a packet is made if the ACK’s is not received within a preset time interval. A message-passing programming style is the preferred style for performance on such model. Also, message passing without ACK’s protocol can be defined as above neglecting the fact that the source is not in need learn whatever the sent packet has arrived or not (only broadcasts the packet). There are problems associated with message-passing systems. These include communication overhead and difficulty of programming [14–16].
4 Overview of methods
4.1 Multi-layer feed-forward artificial neural networks
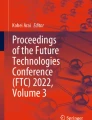
The ANN employs the model structure of a neural network which is a powerful computational technique for modeling complex non-linear relationships particularly in situations where the explicit form of the relation between the variables involved is unknown [17, 18]. An MFANN consists of at least three layers—input, output, and hidden layer. The schematic diagram of a MFANN is shown in Fig. 2. Each neuron in a layer receives weighted inputs from a previous layer and transmits its output to neurons in the next layer. The summations of weighted input signals are calculated and this summation is transferred by a nonlinear activation function. The results of the network are compared with the actual observation results and the network error is trained until the error reaches an acceptable value [18].

A typical multi-layer feed-forward neural network architecture
In Fig. 2, X i is the neuron input, W ij and W kj are the weights, M is the number of neurons in the hidden layer, and Y is the output value.
4.2 Generalized regression neural networks
The GRNN is a generalization of both radial basis function networks and probabilistic neural networks that can perform linear and nonlinear regression [19]. These feed-forward networks use basis function architectures which can approximate any arbitrary function between input and output vectors directly from training samples, and they can be used for multidimensional interpolation [20, 21]. The main function of a GRNN is to estimate a linear or nonlinear regression surface on independent variables (input vectors) U, given the dependent variables (desired output vectors) X. That is, the network computes the most probable value of an output, O x , given only training vectors U. Specifically, the network computes the joint probability density function of U and X. The expected value of X given U is expressed as [19]:
An important advantage of the GRNN is its simplicity and fast approximation procedure. Another attractive feature is that, unlike back propagation-based neural networks, GRNN does not converge to local minima [22]. The topology of a GRNN consists of four parts. First, there is an input layer that is fully connected to the pattern layer. Second, there is a pattern layer that has one unit for each pattern. It computes the pattern Gaussian function expressed by
where
σ denotes the smoothing parameter, u is the input presented to the network, and U i is each of the training vector. Third, there is a summation layer which has two units N and P. The first unit computes the weighted sum of the hidden layer outputs. The second unit has weights equal to “1,” and therefore sums exponential terms (h i ) alone. Fourth, there is an output unit that divides N by P to provide the prediction result.
4.3 Support vector regression
4.3.1 Linear support vector regression
We are given the training data \( (x_{i} ,y_{i} ),(i = 1, \ldots ,l) \), where x is a d-dimensional input with \( x \in \Re^{d} \) and the output is \( y \in \Re \). The linear regression model can be written as follows [23]:
where f(x) is an unknown target function and \( \left\langle {.,.} \right\rangle \) denotes the dot product in \( \Re^{d} \).
In order to measure the empirical risk [24], we should specify a loss function. The most common loss function is the ε-insensitive loss function proposed by Vapnik [25] and is defined by the following function:
The optimal parameters \( \overline{\omega } \) and \( \overline{b} \) in (4) are found by solving the primal optimization problem [26]:
with constraints
where C is a pre-specified value which determines the trade-off between the flatness of f(x) and the amount up to which deviations larger than the precision \( \varepsilon \) are tolerated. The slack variables \( \xi^{ - } \) and \( \xi^{ + } \) represent the deviations from the constraints of the \( \varepsilon \)-tube.
Usually, the dual problem is solved. The corresponding dual optimization problem is defined as
with constraints
Solving the optimization problem defined by (8) and (9) gives the optimal Lagrange multipliers \( \alpha \) and \( \alpha^{*} \), while \( \overline{w} \) and \( \overline{b} \) are given by
where x r and x s are support vectors [26].
4.3.2 Nonlinear support vector regression
For nonlinear regression problems, a nonlinear mapping \( \phi \) of the input space onto a higher dimension feature space can be used, and then linear regression can be performed in this space [27]. The nonlinear model is written as
where
where x r and x s are support vectors. Note that we express dot products through a kernel function K that satisfies Mercer’s conditions [25]. (11) can be written as follows if the term \( \overline{b} \) is accommodated within the kernel function:
Several kernel functions have appeared in the literature. The radial basis function (RBF) has received significant attention, most commonly with a Gaussian of the form:
where \( \rho \) is the width of the RBF kernel.
4.4 Multiple linear regression
MLR is a statistical technique that uses several explanatory variables to predict the outcome of a response variable. The goal of MLR is to model the relationship between the explanatory and response variables. MLR models are often used in the prediction of network performance analysis, being represented by the relationship between network inputs and a set of predictor output variables in (15).
where i = 1, 2, …, n; B i is the residual, E i is the difference between the value of the dependent variable predicted by the model and the dependent variable, and x is the independent parameter.
5 Simulation and dataset generation
OPNET Modeler [11] is used to simulate the SOME-Bus architecture employing the message-passing protocol with ACK’s. Figure 3 shows the node model of the simulated architecture. Each node contains a processor station in which the incoming messages are stored and processed, and also a channel station in which the outgoing messages are stored before transferring them onto the network.

A typical N-node SOME-Bus architecture by message-passing protocol
The underlying process model which controls queue modules’ behavior is OPNET’s built-in acb_fifo model which is shown in Fig. 4. The model has its own server and can concentrate multiple incoming packets streams into its single internal queuing resource. It also supports the First-in-First-out service ordering discipline and a way to control service times. The “init” state is used to initialize the process and setting the appropriate variables. If a packet arrives when the process is in “init” state, the process transitions to the “arrival” state, else it transitions to the “idle” state where it waits for packet arrival. The “arrival” state is used for receiving packets and starting service. In the “arrival” state, if the server is not busy then the process moves into the “svc_start” state, which in turn transitions to the “idle” state, where it waits either for packet arrival or service completion. While in the “idle” state, if the processing of a packet is completed, the process moves into the “svc_compl” state. While in the “svc_compl” state, if the queue is not empty, the process moves into the “svc_start” state.

A typical process model for the queues
The important parameters of the simulation are the number of nodes (selected as 16, 32, and 64), the number of the threads executed by each processor (ranging from 1 to 6), T/R, (ranging from 0.05 to 1), thread run time (exponentially distributed with a mean value of 100), and traffic pattern (uniform, hot-region, bit reverse, and perfect shuffle). In the uniform traffic, the destination node is selected using uniform distribution among the nodes. In the hot-region pattern, the destinations of the 25 % of the packets are chosen randomly within a small hot region consisting of 12.5 % of the nodes [12]. Bit permutations such as bit reverse and perfect shuffle are those in which each bit d i of the b-bit destination address is a function of the one bit of the source address [8]. The dataset obtained as a result of the simulation contains four input and five output variables. The input variables of the prediction model include T/R, node number, thread number, and traffic pattern. The output variables of the prediction model include average CWT (i.e., the time interval between the instant when a packet is enqueued in the output channel until the instant when the packet goes under service), average CU (i.e., average fraction of time that the channel server is busy), average NRT (i.e., the time interval between the instant when a message is enqueued in the output channel until the instant when the corresponding acknowledge message arrives at the input queue), average PU (i.e., average fraction of time that threads are executing), and average IWT (i.e., the time interval between the instant when a message is enqueued in the input queue until the instant when the message gets service from the processor).
The dataset obtained as a result of the statistical simulation includes 792 samples. Table 1 gives the descriptive statistics of the dataset.
6 Results and discussion
The MFANN prediction model is shown in Fig. 5. As is seen in Fig. 5, the neural network structure contains two hidden layers. The first hidden layer has 9 neurons and the second hidden layer has 6 neurons. These numbers have been obtained by trial-and-error (i.e., after testing the neural network with several different configurations and observing that these numbers yield the lowest error rates for prediction). A tansigmoid activation function is used in the hidden layers. A pure-linear activation function is used in the output layer. The Levenberg–Marquardt (LM) algorithm is utilized for training the network. The other important parameters of the MFANN model are the number of epochs (selected as 500), the learning rate (selected as 0.02), and momentum (selected as 0.5).

MFANN model for prediction of the performance measures
The performance of the ANN prediction model is evaluated using R and SEE, the formulas of which are given in Eqs. (12) and (13), respectively
where n is the number of data points used for testing, Y is the observed value, Y′ is the predicted value and \( \overline{Y} \) is the average of the observed values.
The results of the MFANN prediction model are compared with the ones obtained by GRNN, SVR, and MLR. Tables 2, 3, 4, 5, 6, 7, 8, and 9 show the performance of all prediction models in terms of R and SEE using different number of cross-validation folds. In Tables 2, 3, 4, 5, 6, 7, 8, and 9, RBF stands for radial basis function and L stands for linear.
Based on the results, the following points can be made:
-
1.
For all performance measures, the MFANN-based prediction model performs better (i.e., higher R and lower SEE) than SVR-based, GRNN-based, and MLR-based prediction models.
-
2.
SVR-RBF model shows the second best performance for prediction.
-
3.
The SEE of the MFANN-based prediction model decreases as the number of folds in the test set increases from 10 to 80. However, it is observed that the SEE of the ANN-based model increases as the number of folds exceeds 80.
-
4.
The MFANN-based model performs a perfect job in predicting CU and PU (i.e., the SEE is almost zero for both predictions). The prediction errors related to NRT and IWT are higher than the ones related to CWT. This is because of the high standard deviation of NRT and IWT in the dataset.
-
5.
Although the MLR-based prediction model yields good performance for prediction of CU and PU, it does not show the same performance for prediction of CWT, NRT, and IWT. This is because of the non-linear characteristics of CWT, NRT, and IWT.
-
6.
Since there is no training phase in GRNN, the GRNN-based model produces results much faster than MFANN-based and SVR-based prediction models.
-
7.
The MFANN-based prediction model yields the lowest SEE for prediction of PU, where the SEE changes from 0.0125 to 0.0143.
-
8.
The MFANN-based prediction model yields the highest SEE for prediction of NRT, where the SEE changes from 14.2463 to 22.3406.
-
9.
MLR and SVR-L models show similar performance for prediction.
-
10.
The R values for prediction of CWT, CU, NRT, PU, and IWT are close to 1 for all folds.
-
11.
The training times for MFANN-based and SVR-based models are given in Tables 10, 11, and 12. The training times for MFANN-based models are much lower than that of SVR-based models.
Table 10 Training times for the MFANN models for different number of folds Table 11 Training times for the SVR-L models for different number of folds Table 12 Training times for the SVR-RBF models for different number of folds -
12.
The training phase for SVR-RBF model consumes the longest time to make the predictions compared against the ones obtained by other models. This is because of the usage of the Gridsearch algorithm in the SVR-RBF model to compute the optimum values of the related parameters.
-
13.
The execution times for the SVR-RBF and SVR-L prediction models change from 5 to 6 s, whereas the execution times for MFANN, GRNN, and MLR models are negligible (close to zero).
-
14.
The global minima has been reached for all MFANN models.
7 Conclusion
This paper proposes to use MFANN’s to predict the performance measures of a message-passing multiprocessor architecture. The basic idea is to collect a small number of performance measures by means of a statistical simulation and predict the performance of the system for a large set of input parameters based on these. OPNET Modeler is used to statistically simulate the message-passing SOME-Bus architecture. The obtained dataset contains five performance measures (i.e., NRT, CWT, PU, CU, and IWT) of the architecture. MFANN models with different number of folds have been developed to predict these performance measures. R and SEE values of the developed models have been calculated. The MFANN model gives the lowest SEE for the prediction of PU and the highest SEE for the prediction of the NRT. It is shown that MFANN models show better performance than GRNN-based, SVR-based, and MLR-based models for predicting the performance measures.
Future research can be performed in a number of areas. The first area would be expanding the number of input parameters in the dataset. The second area would be feature extraction on input variables. In this case, the critical attributes that best predict performance measures can be selected from a candidate set of attributes through feature selection algorithms combined with ANN’s.
References
Zhou X, Lu K, Wang X, Li X (2012) Exploiting parallelism in deterministic shared memory multiprocessing. J Parallel Distrib Comput 72:716–727
Culler D, Singh JP, Gupta A (2009) Parallel computer architecture: a hardware/software approach, 4th edn. Morgan Kaufmann, New York
Chow ALH, Golubchik L, Khuller S, Yaoc Y (2012) Performance tradeoffs in structured peer to peer streaming. J Parallel Distrib Comput 72:323–337
Chan F, Cao J, Sun Y (2003) High-level abstractions for message-passing parallel programming. Parallel Comput 29:1589–1621
Eeckhout L, Sampson J, Calder B (2005) Exploiting program microarchitecture independent characteristics and phase behavior for reduced benchmark suite simulation. In: Proceedings of the IEEE international symposium on workload characterization. Austin, TX, 6–8 October 2005, pp 2–12
Akay MF, Katsinis C (2008) Performance improvement of parallel programs on a broadcast-based distributed shared memory multiprocessor by simulation. Simul Model Pract Theory 16:338–352
Akay MF, Abasıkeleş I (2010) Predicting the performance measures of an optical distributed shared memory multiprocessor by using support vector regression. Expert Syst Appl 37:6293–6630
Genbrugge D, Eeckhout L (2007) Statistical simulation of chip multiprocessors running multi-program workloads. In: Proceedings of the 25th international conference on computer design, Lake Tahoe, CA, 7–10 October 2007, pp 464–471
Zayid EIM, Akay MF (2012) Computing and estimating the performance measures of a message passing multiprocessor architecture by using artificial neural networks. In: Proceedings of the 2nd international conference on computation for science and technology, ICCST-2, Niğde, Turkey, 9–11 July 2012, pp 76–77
Akay MF, Zayid EIM (2011) Predicting the performance measures of a message passing multiprocessor architecture by using artificial neural networks. In: Proceedings of the 2nd international symposium on computing in science and engineering, ISCSE-2011, Kuşadası, Turkey, 1–4 June 2011, pp 53–58
OPNET Modeler Inc. (2012) OPNET University program. http://www.opnet.com/university_program
Katsinis C (2001) Performance analysis of the simultaneous optical multi-processor exchange bus. Parallel Comput 27:1079–1115
Acacio ME, González J, García JM, Duato J (2002) The use of prediction for accelerating upgrade misses in cc-NUMA multiprocessors. In: Proceedings of the 11th international conference on parallel architectures and compilation techniques. Virginia, USA, p 155
Hesham E, Mostafa A (2005) Advanced computer architecture and parallel processing. Wiley, Hoboken
Thiele L, Wandeler E, Chakraborty S (2005) Performance analysis of multiprocessor DSPs: a stream-oriented component model. IEEE Signal Process Mag 22:38–46
Lemoff BE, Ali ME, Panatopoulos G, Flower GM, Madhavan B, Levi AFJ, Dolfi DW (2004) MAUI: enabling fiber-to-the-processor with parallel wavelength optical interconnects. J Lightwave Technol 22:2043–2054
Pratas F, Trancoso P, Sousa L, Stamatakis A, Shi G, Kindratenko V (2011) Fine-grain parallelism using multi-core, Cell/BE, and GPU systems. Parallel Comput 38:365–390
Chen M-S, Yen H-W (2011) Applications of machine learning approach on multi-queue message scheduling. Expert Syst Appl 38:3323–3335
Khashei M, Hamadani AZ, Bijari B (2012) A novel hybrid classification model of artificial neural networks and multiple linear regression models. Expert Syst Appl 39:2606–2620
Alpaydın E (2010) Introduction to machine learning, 2nd edn. MIT press, London
Firat M, Gungor M (2009) Generalized regression neural networks and feed forward neural networks for prediction of scour depth around bridge piers. Adv Eng Softw 40:731–737
Witten IH, Frank E (2005) Data mining: practical machine learning tools and techniques. Morgan Kaufmann, San Francisco
Cherkassky V, Ma Y (2004) Comparison of loss functions for linear regression. In: Proceedings of the IEEE international joint conference on neural networks, pp 400–405
Cristianini N, Shawe-Taylor J (2000) An introduction to support vector machines and other kernel-based learning methods. Cambridge University Press, Cambridge
Vapnik VN (2000) The nature of statistical learning theory. Springer, New York
Gunn SR (1998) Support vector machines for classification and regression. Technical Report, Department of Electronics and Computer Science, University of Southampton, Southampton
Schölkopf B, Smola AJ (2002) Learning with kernels: support vector machines, regularization, optimization, and beyond. MIT Press, Cambridge
Acknowledgments
We would like to thank the OPNET Technologies, Inc. for letting us use the OPNET Modeler under the University Program and to Cukurova University Scientific Research Projects Center for supporting this work (Project no: MMF2011D8). We would also like to thank Dr. Constantine Katsinis for letting us include the material about the SOME-Bus architecture in this paper.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Zayid, E.I.M., Akay, M.F. Predicting the performance measures of a message-passing multiprocessor architecture using artificial neural networks. Neural Comput & Applic 23, 2481–2491 (2013). https://doi.org/10.1007/s00521-012-1267-9
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00521-012-1267-9