
Abstract
A fuzzy parameterized probabilistic analysis (FPPA) method was developed in this study to assess risks associated with environmental pollution-control problems. FPPA integrated environmental transport modeling, fuzzy transformation, probabilistic risk assessment, fuzzy risk quantification into a general risk assessment framework, and was capable of handling uncertainties expressed as fuzzy-parameterized stochastic distributions. The proposed method was applied to two environmental pollution problems, with one being about the point-source pollution in a river system with uncertain water quality parameters and the other being concerned with groundwater contaminant plume from waste landfill site with poorly known contaminant physical properties. The study results indicated that the complex uncertain features had significant impacts on modeling and risk-assessment outputs; the degree of impacts of modeling parameters were highly dependent on the level of imprecision of these parameters. The results also implied that FPPA was capable of addressing vagueness or imprecision associated with probabilistic risk evaluation, and help generate risk outputs that could be elucidated under different possibilistic levels. The proposed method could be used by environmental managers to evaluate trade-offs involving risks and costs, as well as identify management solutions that sufficiently hedge against dual uncertainties.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
As an important step in pollution-control management procedures, risk assessment is used to determine the quantitative or qualitative value of risk related to a concrete pollution situation and a recognized environmental threat. The general formulation of an environmental risk assessment includes identification of sources of risk agents and their fate and transport through a specific environmental media (i.e. water, air, or soil), comparison with the related environmental standards, and conversion of the related pollution levels into risk information (Liu et al. 2004). Many previous studies have indicated that risk assessment is inherently linked with uncertainties which may be derived from the randomness inherent in nature, biased human judgment, or the lack of sufficient information (Li et al. 2007). Negligence of such uncertainties in the assessment procedures would bring biased or even false information to the related environmental managers and eventually harm the appropriateness of the final pollution-control decisions. It is thus desired that effective approaches be developed for supporting environmental risk assessment under uncertainties.
The general approaches in tackling uncertainties in risk assessment can be divided into two broad categories: probabilistic and possibilistic (Blair et al. 2001; Baudrit et al. 2007). Each group is based on a unique algorithm and has its own advantages and limitations. Stochastic techniques are useful in dealing with the probabilistic type of uncertainties, which are normally derived from natural randomness or variability (Seuntjens 2002). Fuzzy techniques are more suitable to express the possibilistic uncertainties, which are originated from incomplete or imprecise information (Kentel and Aral 2005). Previously, extensive studies in applying either group of methods were reported (Terracini 1996; Mylopoulos et al. 1999; Chen 2000; Maqsood et al. 2003; Kentel and Aral 2004; Mckone and Deshpande 2005; Kentel and Aral 2007; Li et al. 2007; Qin et al. 2008; Chu and Chang 2009; Gutiérrez et al. 2009). In recent years, it has been demonstrated by many researchers that the integrated fuzzy stochastic methods are more useful in compensating the limitations of each group of methods and have a better applicability in addressing risk assessment problems involving different kinds of uncertainties (Ferson and Ginzburg 1996).
Guyonnet et al. (2003) proposed a hybrid approach which combined Monte Carlo random sampling of probability distribution functions with fuzzy calculus, and applied it to a real case of estimation of human exposure via vegetable consumption to cadmium presented in the surficial soils of an industrial site located in the north of France. Chen et al. (2003) developed a hybrid fuzzy-stochastic risk assessment (FUSRA) approach for examining uncertainties associated with both source/media conditions and evaluation criteria in a groundwater quality management system. Liu et al. (2004) developed an integrated simulation-assessment modeling approach for analyzing environmental risks from a landfill leakage through incorporating an analytical groundwater solute transport model, an exposure dose model, and a fuzzy risk assessment model within a general framework. Kentel and Aral (2004) proposed a risk assessment approach through coupling probability theory and fuzzy set theory to treating cancer potency factors associated with ingestion, inhalation and dermal contact together with the contaminant concentration in tap water; the coupled approach combined utilization of fuzzy and random variables which produced membership functions of risk to individuals at different fractiles of risk as well as probability distributions of risk for various alpha-cut levels of the membership function. Later on, Kentel and Aral (2005) proposed a 2D Fuzzy Monte Carlo Analysis (2D FMCA) method to integrate fuzzy set theory into probabilistic risk assessment, and proved that the proposed method was more realistic than the pure 2D Monte Carlo Analysis (2D MCA) in health risk assessment applications where both probabilistic and imprecise information might exist. Baudrit et al. (2007) discussed two joint-propagation methods for groundwater contamination risk assessment and compared them to both interval analysis and the Monte Carlo method. Li et al. (2007) advanced an integrated fuzzy-stochastic risk assessment (IFSRA) approach to systematically quantify both probabilistic and fuzzy uncertainties associated with site conditions, environmental guidelines, and health impact criteria. Yang et al. (2010) developed an integrated simulation-assessment approach (ISAA) to systematically tackle multiple uncertainties associated with Benzene transport in subsurface and assessment of carcinogenic health risk, where a fuzzy-Latin hypercube sampling (FLHS) simulation model and a fuzzy-rule-based risk assessment (FRRA) method were included.
Generally, the previous studies made viable attempt in dealing with different types of uncertainties associated environmental risk assessment. However, most of them may encounter difficulties when some parameters are highly uncertain and exhibit dual-uncertain features (Guo and Huang 2009). The dual uncertainty refers to the type of uncertainty that is a combination of possibilistic and probabilistic distributions. For example, when the mean and standard deviation of a stochastic variable can merely be expressed as fuzzy sets, the variable is said to have dual-uncertain feature and can be called fuzzy-parameterized stochastic (FPS) variable. Similarly, when estimating the upper and lower boundaries and the most-likely values of triangular fuzzy sets, different decision makers may have different judgments, leading to fuzzy sets subject to a certain type of probabilistic distribution; such uncertain parameters can be described as stochastic-parameterized fuzzy (SPF) variables. In fact, in many risk assessment studies, uncertainties associated with the transport modeling inputs are normally described by probability distributions. In practical applications, it is often difficult to build a probability distribution due to the lack of data or the high cost of getting the data; in addition, the temporal or spatial variations of historical data could lead to different parameter-estimation results for stochastic variables (Wood and Antonsson 1990). The related uncertain information is highly compounded and cannot be described by ordinary fuzzy or stochastic format, leading to difficulties of transport modeling and risk quantification when effect of such information on modeling outputs is to be addressed. Previously, there were very limited studies in such a field.
Thus, the objective of this study is to develop a fuzzy parameterized probabilistic analysis (FPPA) method for assessing risks associated with environmental pollution-control problems. Risk hereafter means the probability of the contaminant concentration exceeding a specific standard. Under a fuzzy environment, such a risk is not fixed and may present as a group of probabilities under various fuzzy membership degrees. FPPA integrates environmental transport modeling, fuzzy transformation analysis, probabilistic risk assessment, fuzzy risk quantification into a general risk assessment framework, and is capable of handling uncertainties expressed as fuzzy-parameterized stochastic distributions. The reason this study will focus on FPS type uncertainty is because the traditional modeling studies regarding the fate and transport of pollutants in environmental media under uncertainty mostly relied on stochastic theory, the FPS type is more commonly encountered in real world applications than the SPF one. Two environmental problems are to be investigated in order to show the applicability of FPPA. The first problem is about the point-source pollution in a river system with uncertain water quality parameters, and the second is concerned with groundwater contaminant plume from waste landfill site with poorly known contaminant physical properties.
2 Methodology
2.1 General framework of FPPA
An environmental transport model that is used to predict the pollutant fate may involve complex uncertain inputs (i.e. dual uncertainties) which cannot be used at the first hand. If there are sufficient historical data, the uncertain parameters could be presented by probability density functions (PDFs) and normally handled by Monte Carlo simulation. In situations when the data quality is poor, some parameters may have to be estimated based on on-site survey, expert consultations and round-table meeting (Qin et al. 2008). The number and the specific meaning of the distribution parameters normally depend on the type of stochastic variables such as normal, lognormal, and gamma. For normal and lognormal ones, we can espouse the mean and the standard variation as the distribution parameters; for gamma one, we need to use the scale and the shape parameters. In this study, we only focus on normal distributions which can be considered suitable for many hydrogeological uncertainties (Massmann et al. 1991; Sperling et al. 1992). A stochastic parameter with fuzzy distributions can be described by:
where \( \tilde{\mu }_{di} \) and \( \tilde{\sigma }_{di} \) are fuzzy mean and fuzzy standard deviation for parameter \( \tilde{X}_{d} ; \) d is an index ranging from 1 to D; D is total number of uncertain parameters. Figure 1 shows the illustration of a fuzzy-parameterized stochastic variable. The shape of the fuzzy sets depends on the availability of data sources and survey results, and may not necessarily be triangular. The peak values at membership degree of 1 means the most likely values of the stochastic parameters; those at membership degree of 0 fall within the range from the minimum to maximum possible values.

Illustration of a fuzzy-parameterized stochastic variable
The proposed FPPA method is based on the integration of both fuzzy and stochastic algorithms and determined to be an effective endeavor to tackle the mentioned dual uncertain problems. Figure 1 shows the general framework of FPPA. The method basically involves an outer loop, named fuzzy transformation analysis, and an inner loop, probabilistic risk assessment. The outer loop discretizes the fuzzified stochastic inputs into normal stochastic ones and generates outputs that could be described by fuzzy sets. Within a single iteration of fuzzy transformation, probabilistic risk assessment will be conducted to generate the statistical distribution of transport modeling outputs based on Monte Carlo simulation coupled with environmental simulation models, as well as the violation risk compared with the related environmental standards. After all fuzzy iterations are completed, the obtained violation-risk information will present in fuzzy format and be further defuzzified into deterministic index for decision analysis. In the following sections, individual components of FPPA will be introduced in detail, and the operating procedures will be illustrated afterwards (Fig. 2).

System framework of FPMC Risk Assessment
2.2 Simulation model for pollutant transport
The migration of contaminants in environment is controlled by a number of physical, chemical, and biological processes. A critical step in understanding those processes is the modeling analysis of the flow and transport of the pollutants in an environmental medium (e.g. soil, water, and air). The fundamental output produced by the transport models consists of predicted mass fluxes at specified locations within the system, or predicted concentrations within environmental media throughout the system. If desired, concentrations in environmental media can be converted to doses and/or health risks by assigning appropriate conversion factors (Liu et al. 2004; Li et al. 2007). According to the complexity of the problem, the model could be either numerical or analytical. Let y be a concerned system output, an environmental pollutant transport model could be written as:
where X is a vector of deterministic parameters; \( \varvec{\upxi}\) is a vector of uncertain parameters; f F represents the environmental transport model.
2.3 Fuzzy Transformation (FT)
Fuzzy sets are defined as the sets with ambiguous objects. Data can generally be received in terms of linguistic judgments and beliefs (natural language), which can then be converted to the form of fuzzy sets in order to provide a base for logical and mathematical reasoning (Zadeh 1975). The α-cut (defined as A α = {x|μA(x) ≥ α}) is a set of elements that belong to fuzzy set A at a confidence degree (or the degree of plausibility) of α. In many systems, because of the inherent limitations of the mechanism of observation or human-based estimation, the information becomes suspect below a certain degree of reliability. The fuzzy transformation (FT) method was firstly proposed by Hanss (2002). For a simulation model, the related fuzzy inputs will normally be decomposed into a number of α-cut levels. At each α-cut level, there will be a discrete fuzzy interval in which both the interior and end points will be evaluated by simulation models in order to produce an output interval. With all possible α-cut levels being evaluated, these intervals can then be grouped to generate the final fuzzy outputs (Li et al. 2003; Qin et al. 2007).
Let a simulation model, f F , be the function of n fuzzy parameters, denoted as x i (i = 1, 2,…, n). The function output q F = f F (x 1, x 2,…, x n ) is also fuzzy set. Let x i be decomposed by m α cuts. Each input parameter will then become a set P i containing m + 1 intervals:
where a (j) i and b (j) i represent the lower and upper bound of the fuzzy interval at the membership degree μ j for the ith uncertain parameter. The intervals can then be transformed into the following arrays (Hanss 2002):
Under each α-cut level (i.e. a single j value), there will be n arrays with each one containing 2n elements. Each combination of the elements at the same position of arrays forms the inputs for the simulation model f F . This helps generate a series of results which form the lower and upper limits at different membership degrees. The fuzzy output q F can be obtained using recursive approximation (Kumar et al. 2009).
2.4 Probabilistic Risk Assessment (PRA)
Probabilistic risk assessment is a technique that utilizes the entire range of input data to develop a probability distribution of exposure or risk rather than a single point value. The input data can be measured values and/or estimated distributions. Values for these input parameters are sampled thousands of times through a modeling or simulation process to develop a distribution of likely exposure or risk. Probabilistic risk assessment can be used to evaluate the impact of variability and uncertainty in the various input parameters, such as environmental exposure levels, fate and transport processes (Maxwell and Kastenberg 1999a, b; Maxwell et al. 1999; Tartakovsky 2007; Bolster et al. 2009). PRA consists of the following elements: (a) risk or hazard identification; (b) assessment of pollutant emission and environmental loading capacities; (c) uncertainty analysis; and (d) risk quantification. In a given system, the probabilistic risk associated with industrial activities could be expressed as the probability of a pollutant’s concentration exceeding environmental standards (Chen et al. 2003; Bolster et al. 2009):
where P F denotes probability or risk level; C denotes pollutant emission (random variable), [M/L3]; L is environmental loading capacity (random variable), [M/L3]; f CL is the probabilistic density function (PDF). If L could be defined by environmental guidelines (i.e. if L = L 0), the risk level can be quantified as:
In practical application, Monte Carlo simulation (MCS) is widely used to handle stochastic uncertainties by generating a large quantity of random realizations of the inputs. It then utilizes repeated executions of environmental models to simulate stochastic processes of contaminant transport (Hu and Huang 2002). Each execution of the model produces a sample output of pseudo-values. As a result, the sampling outputs can then be examined distributed in PDFs or cumulative distribution functions (CDFs) (Fishman 1995; Rubinstein and Kroese 2007). The environmental loading capacity or environmental guideline will be used as a cutting point for obtaining the related violation risk level.
2.5 Fuzzy Risk Quantification (FRQ)
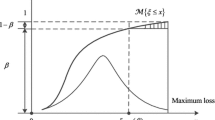
The results from fuzzy transformation are expressed as fuzzy sets where the x-axis is the violation risk levels from probabilistic risk assessment and the y-axis is the fuzzy membership degree. The decision making process in risk management studies requires that the fuzzy risk could be effectively quantified (defuzzified) and a meaningful criterion could be established. As proposed by Guyonnet et al. (1999, 2003), either possibility measure (PM) or necessity measure (NM) can be used to determine the acceptability of a fuzzy risk, \( \tilde{R} \), with respect to a compliance criterion (CC). In this study, we only focus on NM due to its conservative view of defuzzification (Kikuchi and Pursula 1998). The NM is defined as follows (Dubois and Prade 1988):
where \( \mu_{{\tilde{R}}} \left( x \right) \) is membership function of \( \tilde{R} \) for any value of x; \( \mu_{{\tilde{C}}} \left( x \right) \) is membership function of the compliance criterion for any value x. The purpose of the above equation is to measure the validity of the proposition, “the fuzzy risk \( \tilde{R} \) is less than or equal to CC′′. The compliance criteria may not necessarily be uncertain. Figure 3 illustrates the determination of NM under various conditions, where ROV means risk of violation. It is obviously that the range of the NM would fall between 0 and 1. If the peak value of the fuzzy risk is higher than CC, NM would be zero; if the entire fuzzy membership function of ROV is lower than CC, NM would be 1. When the CC level is within the range of the right wing of fuzzy membership function, the NM value would vary from 0 to 1 depending on the position of CC.

Determination of necessity measures
Risk assessment is used to describe potential impacts of contaminants. Further decision analysis is needed to help identify proper site management strategies (Sadiq et al. 2007; Qin et al. 2008). The NM value from FRQ represents the possibility of a fuzzy event, namely, the degree of fuzzified stochastic risk meeting the compliance criterion. The CC level is a subjective index and must be identified through discussion among various stakeholders. In order to guide the further decision analysis, an acceptance criterion (AC) could be used. It is defined as the threshold of NM for selecting a specific environmental control action. For example, if NM is higher than AC, it is acceptable to take actions; if NM is lower, the possibility of satisfying CC will not be high enough to support the espousal of the corresponding control action. Generally, a table listing the NM values under various site management strategies can be pre-generated. Then, a proper control action can be identified based on AC information.
2.6 Procedures of applying FPPA
From above descriptions, FT is effective dealing with uncertainties expressed as fuzzy membership functions and PRA is useful in predicting violation risks of environmental guidelines due to stochastic uncertainties. FPPA could couple the two methods into a general framework and is capable of handling uncertain parameters exhibiting both fuzzy and stochastic features (i.e. dual uncertainties). The detailed procedures of FPPA are described as follows:
-
1
Identify the fuzzy parameterized stochastic parameters: \( \tilde{X}_{d} = \left( {\tilde{\mu }_{d} , \, \tilde{\sigma }_{d} } \right),d = \, 1, \, 2, \ldots ,D; \)
-
2
Discretize the range of membership grade of [0, 1] into m α-cut levels which are evenly distributed;
-
3
Under α-cut level of j, decompose \( \tilde{\mu }_{d} \) and \( \tilde{\sigma }_{d} \) into a group of fuzzy intervals, i.e. \( \tilde{\mu }_{d}^{\left( j \right)} = \left[ {\inf \left( {\tilde{\mu }_{d}^{(j)} } \right),\;\sup \left( {\tilde{\mu }_{d}^{(j)} } \right)} \right] \) and \( \tilde{\sigma }_{d}^{\left( j \right)} = \left[ {\inf \left( {\tilde{\sigma }_{d}^{\left( j \right)} } \right),\;\sup \left( {\tilde{\sigma }_{d}^{\left( j \right)} } \right)} \right]; \)
-
4
Start the FT analysis (i.e. outer loop iteration) and identify the arrays containing all possible combinations of inputs (i.e. the parameters of stochastic parameters) under each α-cut level;
-
5
For each combination of input from FT, start the PRA process based on Monte Carlo simulation and the related environmental standards to obtain the output of violation risks (i.e. P F );
-
6
Repeat steps 4 and 5 until computations under all α-cut levels are conducted;
-
7
Formulate the fuzzy outputs base on the obtained fuzzy intervals under all α-cut levels, which can be expressed as \( \left\{ {\left[ {\inf \left( {\tilde{\mu }_{y}^{\left( j \right)} } \right),\sup \left( {\tilde{\mu }_{y}^{\left( j \right)} } \right)} \right]\;{\text{and}}\;\tilde{\sigma }_{d}^{\left( j \right)} = \left[ {\inf \left( {\tilde{\sigma }_{y}^{\left( j \right)} } \right),\sup \left( {\tilde{\sigma }_{y}^{\left( j \right)} } \right)} \right]} \right\},\left( {j = \, 1, \, 2, \ldots ,m} \right); \)
-
8
Use NM and CC to quantify the acceptability of the fuzzy proposition that the fuzzy risk is less than or equal to a predefined standard under various environmental control scenarios.
-
9
Based on AC, determine the best control strategy.
3 Case studies
Two environmental problems are investigated in order to show the applicability of FPPA in dealing with risk assessment under dual uncertainties. The first problem is about the point-source pollution in a river system with uncertain water quality parameters, and the second is concerned with groundwater contaminant plume from waste landfill site with poorly known contaminant physical properties. Both problems firstly deal with fuzzy transformation operation, followed by probabilistic risk assessment under each fuzzy discretized scenario; a defuzzification process based on necessity measure is then used to convert the fuzzy outputs into measurable index for guiding further management decisions. Often, in reality, uncertainties may be associated with many parameters; the two study cases simplify the problem scales by assuming that only a few key uncertain parameters are of concern. The management actions are also simplified into percentage of reductions of the source strengths. Thus, it is critical that, in real applications, more specific consideration would be needed to link the computed control efficiencies and the available remediation or pollution-control techniques.
3.1 River water pollution problem
The risk assessment of river water pollution problem considered here is adapted from Qin and Huang (2009). A river section, with a length of about 25 km, receives wastewater discharged from six industrial point sources, including a leatheroid plant, a hospital, a paper mill, a waste water treatment plant, a textile plant, and a chemical plant. The system map is provided in Fig. 4. Putting each discharge source as the cutting point, the river section can be divided into 6 segments. Before any control actions to be undertaken, it is desired that a risk assessment be conducted to evaluate the seriousness of water quality pollution in these river segments in comparison of the Class-II BOD and DO standards (i.e. 3 and 6 mg/l, respectively) in the China National Surface Water Quality Standards (CEPA 2002). A multi-segment BOD-DO simulation model will be used to address the relationships between the pollutant loadings and the environmental responses in the river system. The indicators of dissolved oxygen (DO), carbonaceous biological oxygen demand (CBOD), nitrogenous biological oxygen demand (NBOD), and sediment oxygen demand (SOD) are variables to be simulated. The river system is assumed to be in steady-state flow condition, and each river segment assumes having homogeneous hydrodynamic and solute-transport characteristics. The depletion of dissolved oxygen are primarily caused by assimilation of both the carbonaceous and nitrogenous waste materials, and offset by the absorption of oxygen from the atmosphere. The basic BOD-DO relations in a single-source river segment could be described as follows (Thomann and Mueller 1987):

System map of the study river system
where L c is the ultimate CBOD concentration, [M/L3]; L N is the ultimate NBOD concentration, [M/L3]; k d is the CBOD decay rate in river streams, [T−1]; k s is the CBOD decay rate due to sedimentation, [T−1]; O is the DO concentration, [M/L3]; O s is the saturated DO concentration, [ML−3]; k N is the nitrification rate (NBOD decay rate in river), [ML−3]; \( k_{a} \)is the reaeration rate, [ML−3]; u x is the average stream flow rate, [L/T]; x is the flow distance along the x axis, [L].
For multiple segments with more than one wastewater discharge outlets scattering along the river, the water quality at each segment is affected by various sources from the upper stream. The related relations should be derived based on equations of mass balance, flow continuity, and BOD-DO equilibrium under a steady-state flow condition. Detailed description of the related equations can be referred to Qin and Huang (2009). The source intensity data is shown in Fig. 4. Uncertainties are assumed to be associated with the BOD deoxygenation and decay rates (k dt , k Nt and k st ) and reaeration rate (k at ); they are expressed as fuzzy parameterized stochastic parameters shown in Table 1. The stochastic parameters are assumed to have normal distributions and described by means and standard deviations (Qin and Huang 2009). The related means and standard deviations are further described by triangular fuzzy membership functions. The fuzzy inputs will be discretized into six α-cut levels (i.e. 0, 0.2, 0.4, 0.6, 0.8 and 1); the number of realization for Monte Carlo simulation is set as 200. The proposed FPPA method will be used to evaluate water quality violation risk at each river segment. To help decide a proper control action, the risk information under various source-control scenarios is also analyzed.
Figures 5 and 6 present the calculated fuzzy outputs of the violation risks for BOD and DO under various control efficiencies, respectively. Instead of a single value, the results are shown as fuzzy sets where the level of uncertainties would increase with the decrease of fuzzy membership degrees. For example, in Fig. 5a for segment 2, the BOD violation risk would be 0 when the membership degree is greater than 0.8; however, when system becomes vaguer, say 0.2, the violation risk would vary within the range of [0, 0.62]; at an extreme condition when the membership degree is 0 (i.e. highest vagueness), the range of variation would be [0, 1]. This demonstrates that the fuzziness of the input parameters would lead to imprecision of risk predictions; the higher the fuzziness, the wider the fuzzy interval of the result would be. Moreover, it is found that some fuzzy membership functions would converge into crisp values of either 0 or 1, such as segments 1, 4, and 5 in Fig. 5a and segment 1 in Fig. 6. The violation risk of 1 means that the environmental standard would be completely violated regardless of uncertainty impacts; on the other hand, a risk of 0 means the river segment is sufficiently safe.

Predicted fuzzy violation risks of BOD under various control efficiencies

Predicted fuzzy violation risks of DO under various control efficiencies
A direct observation on the fuzzy membership functions in Figs. 5 and 6 can help generate a rough picture of what the pollution levels are at different segments and how violation risks vary with control efficiencies. Obviously, the violation risk in terms of BOD is highest at segment 4, followed by segment 5; segments 2, 3, and 6 rank in the middle and segment 1 is the lowest. With regard to DO standard, segment 6 is most risky, followed by segments 4, 3, 2, and 5; segment 1 is the safest. In addition, the control efficiency seems to increase with the decrease of risk levels. For example, when the intensity of discharge sources changes from 25 to 50%, the BOD violation risk at segment 5 would drop from 0.98 to 0.60 under the most uncertain condition (i.e. with the fuzzy membership degree being 0); when it goes up to 75%, the risk would become negligible (<10−6). The above-mentioned facts can be observed directly. However, due to fuzzy representations of the risk outputs, it is normally difficult to clearly differentiate the distinctions among those middle-level risks where the fuzzy membership functions are overlapped to some extent. This brings difficulties to further decision making or management.
Table 2 shows the necessity measures (NM) for the risk outputs. Three levels of compliance criteria (CCs) are used. They are 0.2, 0.4, and 0.6, corresponding to strict, moderate, and loose criteria, respectively. The compliance criterion (CC) represents the preference standard of the decision makers to the violation risks obtained from stochastic risk quantification. For example, 0.2 means that the acceptable probability of violating the environmental standard should be lower than 0.2. The NM means the possibility of satisfying the CCs. A level of 1 means a CC is completely met, and a level of 0 means a 100% violation. From Table 2, the NM values would vary with the strictness of CCs as well as the control efficiency. Taking segment 6 as an example, when the control efficiency changes from 0 to 75%, NM for BOD risks would increase from 0.59 to 1; when the CC levels are 0.2, 0.4, and 0.6, the NM values for DO risks under 25% control efficiency would become 0.02, 0.20, and 0.47, respectively. These results indicate that the lower the level of CC, the stricter the need for river water quality control; conversely, the more allowable the risk of environmental damage (i.e. higher level of compliance criteria), the lower the requirement for protection. A tradeoff based on acceptance criterion (AC) can be analyzed to help identify cost-effective control schemes. AC is the threshold of a NM value for accepting a management action. The higher an AC level, the more difficult a control strategy would be considered. From Table 2, if AC is 0.50, a 75% control effort could guarantee a 100% possibility of meeting all CCs; however, the related treatment cost is also the highest. A 25% control efficiency would not be acceptable as the CCs at segments 4 and 5 could not be satisfied in most cases. A control level at 50% may be suitable since both NM values and treatment costs are well balanced; however, if a strict CC level is to be used, a 75% source mitigation effort would be needed since a 50% control cannot guarantee a satisfactory NM value at segment 4.
For this study case, the pollution control efforts are based on the evaluation of risks for all segments. The control efficiency is assumed to be identical for all discharge sources. In real applications, the control efficiencies could vary with different sources in order to achieve better cost efficiencies. It is thus desired that more scenarios of pollution-control strategies be designed for supporting decision making of river water quality management. Nevertheless, the proposed risk assessment method could effectively address the complex uncertainties in the water quality parameters and project their influences to the final risk-assessment outputs; it could help generate useful information for guiding implementation of further pollution-control actions.
3.2 Groundwater contamination problem
As a second example of FPPA, consider the problem of groundwater contamination due to landfill leakage, where a number of aquifer parameters are uncertain. The study case, involving a waste landfill located in Western Canada, has been thoroughly investigated by Liu et al. (2004). This landfill site, as shown in Fig. 7, has been operated over 40 years, and the groundwater contamination was detected about 20 years ago. The closest water supply well is located about 5 km down-gradient of the groundwater flow direction. According to site monitoring results, the major contaminants in groundwater are Benzene, Toluene, and Xylene (BTX). Upon release to the environment, BTX contained in waste landfill leachate will migrate downward under the force of gravity, till they encounter a physical barrier or are affected by buoyancy forces near the groundwater table. Once the capillary zone is reached, the contaminants may be dissolved in groundwater and transport down gradient (Liu et al. 2004). After reaching the water table, BTX could be attenuated by dispersion, adsorption, and further degradation. The aquifer is considered homogenous, isotropic and of constant thickness; the groundwater flow is steady and uniform, and the velocity is in the positive x-direction. The sorption is assumed in equilibrium and behaves linearly and the mass degradation of contaminants is first-order. Based on these settings, the solute transport process could be well addressed by a three-dimensional analytical model proposed by Yeh (1981):

System diagram of the landfill leakage problem
where c is solute concentration [M/L3]; x, y, and z are Cartesian coordinates in the longitudinal, lateral, and vertical directions, respectively [L]; a L , a T , and a z are longitudinal, transverse, and vertical local pore-scale dispersivity coefficients, respectively [L]; V is groundwater seepage velocity [L/T]; R is retardation coefficient; t is time [T]; and λ is effective decay coefficient [T−1]. The retardation coefficient is defined as R = 1 + ρ b K d /θ, where θ is volumetric water content; K d is distribution coefficient [L3/M]; ρ b is bulk density of the porous medium. As shown in Fig. 7, the study region is semi-infinite in the x-axis (0 ≤ x < ∞), infinite in the y-axis (|y| < ∞), and finite in the z-axis (0 ≤ z ≤ H). The model treats the contaminant concentration in the leachate directly below the land disposal unit as a Gaussian distribution along the y-axis and a uniform distribution over the penetration depth (H), [L]. The maximum dissolved concentration of the contaminant, c 0, is assumed to occur at the center of the Gaussian distribution and vary at a standard deviation (σ), [L]. Under a steady-state condition, it is assumed that the initial source concentration equal the solubility S [M/L3].
The solution of the analytical model has been thoroughly discussed by Huyakorn et al. (1987). In this study, only the concentration distributions along the plume center line (x-axis) at a steady-state condition will be considered. It can be described by the following equation (Huyakorn et al. 1987):
where c p (x) is concentration of contaminant at distance x [M/L3] (i.e. the solution of Eq. 9); c f and c corr are intermediate parameters. B is aquifer thickness;
Since the water supply well is under threat of BTX contamination, it is desired that a risk assessment be conducted to evaluate the related groundwater quality. According to the USEPA National Primary Drinking Water Regulations, the BTX standards are 0.005, 1, and 10 mg/l, respectively (USEPA 2009). However, due to complex uncertainties associated with the solute transport process, it is questionable to judge the contamination impacts based on deterministic modeling efforts. In this case, the hydrogeological conditions are relatively simple and the related physical properties of the aquifer are considered constant. The fluid properties, including the solubility (S, i.e. source strength) and effective decay constant (λ), are considered having large variations in both spatial and temporal scales. A mere probabilistic expression for these factors is insufficient to reflect system complexities. Thus, a coupled fuzzy-stochastic expression is considered. The basic input data are listed in Table 3. Two key inputs, S and λ, are chosen as the fuzzy-parameterized stochastic parameters. Generally, these two parameters are considered to have normal distributions (Li et al. 2003; Maqsood et al. 2003). Due to shortage of sufficient data in addressing stochastic distributions, the related mean values (M) and standard deviations (SD) are assumed vaguely defined, and will be handled by triangular fuzzy membership functions. Consequently, the above two sets of parameters (M s , SD s ), and (M λ , SD λ ) are used as inputs for FPPA. Six α-cut levels (i.e. 0, 0.2, 0.4, 0.6, 0.8 and 1) are designed for FT manipulation. The BTX concentrations in the supply well are predicted in the simulation process. The number of Monte Carlo simulation is set as 100.
Figure 8 presents the fuzzy violation risks for BTX under different control efficiencies. If the stochastic variables are free of uncertainties (i.e. fuzzy membership degree = 1), Benzene would show higher violation risks than other contaminants under the same source-control efforts. However, when system information goes vaguer, the violation risks would show larger variations. For example, at fuzzy membership degree of 0.8, the violation risk for Toluene without any source control would range from 0.16 to 0.45; when membership degree reduces to 0.4, the range would extend from 0 to 0.72. The propagation of fuzziness would lead to the increase of difficulty in quantifying the probability of violating the related environmental standards and identifying appropriate control actions. Such a varying trend is similar to that for the river pollution-control case.

Predicted fuzzy violation risks for Benzene, Toluene and Xylene under various control efficiencies
Table 4 lists the calculated NM levels under various control efficiencies. If 0.5 and 0.2 are considered as AC and CC levels, the best control efficiencies for Benzene, Toluene, and Xylene would be 70%, 50%, and 10%, respectively. If the CC level goes up to 0.5, the efficiencies would reduce to 50%, 10%, and 0%, respectively; if the AC level increases to 0.8, the efficiencies would rise up to 80%, 60%, and 20%, respectively. These results demonstrate that the magnitude of efforts for reducing BTX contamination would increase with the increase of strictness of satisfying the related environmental standards; this corresponds to the decrease of CC as well as increase of AC. For better decision making, a spectrum of NM values under various CC levels could be generated first (in tabular form or graphical representation); then the management schemes under various AC levels could be identified; the final decision can be made based on a tradeoff analysis on a spectrum of available options.
Generally, the related outputs would be useful for the decision makers to identify proper control actions in consideration of risks originated from both stochasticity and fuzziness of input parameters. The control efficiency of removing contaminants from subsurface largely depends on the selection of a specific remediation technology. A source reduction of over 80% would require a costly clean-up strategy that may take a longer period or a higher investment of chemical or biological solutions (e.g. bioremediation or surfactant-enhanced remediation); for control efficiency below 20%, cheaper options may be more desirable (e.g. natural attenuation). In real-world applications, it would be more flexible that available technologies are screened out first, and then their treatment cost and efficiencies are investigated based on specific site conditions; based on the risk information obtained from FPPA, a cost-effective technology can then be identified.
4 Discussions
The two applications presented in this study demonstrate the potential of FPPA in assisting environmental managers to evaluate trade-offs between risk and cost, as well as identify management solutions that sufficiently hedge against dual uncertainties. To further evaluate its potential benefits, FPPA can be compared with pure stochastic risk assessment methods. Obviously, the results corresponding to the membership degree of 1 would be identical to the one that could be obtained if no fuzziness is considered for stochastic risk quantification. For example, in Fig. 6a, the probability of violating DO standard at segment 6 would be 0.79 if the fuzzy uncertainty is neglected; this lead to a conclusion that the water quality at this segment, very likely, cannot meet the Class II standard. Based on FPPA method, no matter what levels of compliance criteria are to be used, the NM value would be zero, implying an impossibility of satisfying the related environmental standard. In the landfill case, with a pure stochastic risk assessment, the probability of violating the Benzene standard would be 0.44 without any control effort; this indicates a slightly low probability of event occurrence. Through FPPA, the NM values under CC levels of 0.2, 0.5, and 0.8 would be 0, 0.04, and 0.27, respectively; this means that if the expected level of compliance is strict, the violation would not likely to happen; but if it is highly loose, the event may occur but at a low level of possibility. These results demonstrate that the results from stochastic risk quantification are consistent with those from FPPA method when no fuzzy information is involved.
However, the stochastic risk assessment method can only deal with the situation when there is no further uncertainty associated with the input parameters. With the influence of fuzziness, the stochastic risk outputs may have large variations. For example, regarding segment 6 in Fig. 6a, as the stochastic input parameters are associated with a certain level of fuzziness (e.g. 0.6), the violation risk would possibly decrease to as low as 0.05 or increase to as high as 0.98. Such an expansion of output ranges makes it difficult to understand the related risk information. The FPPA method could effectively mitigate such a problem through introducing algorithms of fuzzy measure and rule-based decision making. For example, in Fig. 8b under 10% control efficiency, stochastic risk assessment would give a probability of 0.15 for Toluene’s risk status; this obviously will lead to the conclusion that the site is very likely safe from Toluene impact and a serious control effort may not be needed. However, through FPPA, the results indicate that even if a moderate concern is taken (i.e. CC = 0.5), the possibility of compliance (i.e. NM value) could be relatively low (i.e. 0.48); therefore, a stringent control strategy may be necessary. These results demonstrate that the pure stochastic risk assessment is just one of the special cases in FPPA assessment; the fuzziness associated with stochastic parameters could easily lead to deviated or even false conclusions of risk assessment, and in turn, influence the cost effectiveness of the final decisions of responsive actions.
In this study, there are totally three standards to be used, i.e. environmental standard, compliance criterion, and acceptance criterion. The environmental standards are normally promulgated by the governmental agencies and are readily available from literatures or reports. The criteria of compliance (CC) and acceptance (AC) are essential indicators in reducing the complexities associated with impacts of coupled fuzzy stochastic uncertainties on risk assessment, and guiding the related decision making. The application of CC is basically a defuzzification process for converting the fuzzified stochastic risk outputs into a measurable index. The purpose of AC is to build a linkage between the extent of risk acceptability (i.e. NM value) and the management strategy. Both CC and AC are case specific and largely dependent on the subjectivity of decision makers; determination of their values must be based on thorough group discussions, expert consultations, or public surveys.
Application of risk-based decision analysis to engineering design has roused much attention over the past decades. Examples can be found in the works of Freeze et al. (1990), Massmann et al. (1991), Sperling et al. (1992), James and Gorelick (1994), Khadam and Kaluarachehi (2004), and Qin et al. (2008). These studies have made viable attempts in developing sophisticated techniques to decision analysis in light of either geological and/or parameter uncertainties. Particularly, the pioneering works of Freeze et al. (1990) and Massmann et al. (1991) effectively addressed aquifer heterogeneity, prior information and posterior distributions conditional on hydrological data through Bayesian analysis, and applied a risk-cost-benefit objective function to evaluate the economic properties of alternative management strategies. Compared with their works, this study essentially focuses on the treatment of fuzziness that may be associated with probabilistic risk outputs. The proposed management framework is relatively simple and could be further enhanced through incorporating more sophisticated decision analysis techniques such as multi-criteria decision making (Khadam and Kaluarachehi 2004). Nevertheless, the real management scenarios may not necessarily be limited to single actions like the control efficiency in this study. They could be established based on different designs of site investigation, waste-reduction technology, and monitoring network system, with both capital and operating costs being considered. A rigorous effort in data collection may have to be made.
The challenge of handling data quality and resolution in environmental modeling under uncertainty has also been attempted through fully probabilistic approaches such as Bayesian analysis and minimum relative entropy (MRE) based techniques (Woodbury and Ulrych 1993; Hou and Rubin 2005). These approaches espouse prior probabilities to reflect uncertainties associated with vagueness of data sources; the suitability of prior information will be updated when new field observations become available. Instead of trying to reduce uncertainties in the sense that additional data are introduced, FPPA focuses on using an alternative description about the vagueness in stochastic parameters and their propagation through risk assessment modeling. The advantage of such treatment lies in strength of fuzzy set theory in dealing with vague or imprecise information arising from data shortage or subjective human judgment (Sadiq et al. 2007; Qin et al. 2008). Should additional data become available, the distribution of dual uncertainties could also be adjusted in order to render the simulated output better match the observed profile.
Li et al. (2007) also made a viable attempt in conducting an integrated fuzzy-stochastic risk assessment (IFSRA) to systematically quantify both probabilistic and fuzzy uncertainties. Compared with his work, our study has a number of major contributions. Firstly, FPPA can deal with uncertainties associated with site conditions in coupled fuzzy and stochastic formats (i.e. dual uncertainties). IFSRA accounts for fuzziness only in environmental guidelines and health impact criteria, and deals with stochastic parameters separately in contaminant transport modeling. Secondly, FPPA introduces two deterministic indicators (i.e. CC and AC) to convert the complex risk information into a measurable index to underpin identification of management strategies. IFSRA needs to construct fuzzy distribution information for the related regulatory criteria and establish a detailed fuzzy rule base through more rigorous efforts in data procurement. Thirdly, the generality of FPPA in various risk assessment fields was illustrated by two cases: a river pollution problem and a groundwater contamination problem. IFSRA, with a focus on using fuzzy-rule based operation to balance uncertainty derived from environmental-guideline-based risk (ER) and health risk (HR), may be more suitable for petroleum contamination problems.
The FPPA method is a new attempt in dealing with dual uncertainties associated with environmental risk assessment processes. Although the two study cases have demonstrated its applicability and advantages, some technical limitations also exist and deserve further investigations. Firstly, FPPA involves both fuzzy transformation analysis and Monte Carlo simulation which requires extensive computational efforts. The problem becomes more severe if the simulation processes involve complex numerical models. For example, a major difficulty in predicting subsurface contaminant transport lies in the complexity of geological conditions such as heterogeneity. The related information normally has high spatial variations and the uncertainty could be associated with any geological location. This, in turn, would lead to enormous computational burden. A parallel computing strategy or high-performance computer may be needed for dealing with such a difficulty. Another potential way of mitigating the problem is to assume a number of homogeneous zones based on existing monitoring data and build a specific distribution of dual uncertainty for each zone. Secondly, the defuzzification technique is not limited to necessity measure. Other alternatives such as possibility measure could also be used (Zadeh 1975). The results may be sensitive to the different methods adopted.
Although the proposed method was only demonstrated in the field of environmental risk assessment where a deterministic environmental guideline was used in probabilistic risk quantification, it is also applicable to health risk assessment. But the major difference is that there are rarely accurate or fixed guidelines or criteria in deciding the health risk levels due to high uncertainty of dose–response relations (Maxwell and Kastenberg 1999a, b; Kentel and Aral 2004). For example, when assessing the potential for risks to people, toxicology studies generally involve dosing of mature test animals such as laboratory mice as a surrogate for humans. Since the knowledge about how differently humans and rats respond is rare, the managers often employs the use of an uncertainty factor to account for possible differences; additional consideration may also be made if there is some reason to believe that the very young are more susceptible than adults, or if key toxicology studies are not available (USEPA 2009). The equation for calculating necessity measure is still applicable in this condition but becomes more difficult to operate since both the left and right-hand items are fuzzy. Further studies are desired to investigate the applicability of FPPA in health risk assessment.
5 Conclusions
A new risk assessment method, named fuzzy parameterized probabilistic analysis (FPPA), was developed to assess risks associated with environmental pollution-control problems. Two environmental problems were investigated for demonstrating the applicability of FPPA. The first problem was about the point-source pollution in a river system with uncertain water quality parameters, and the second was concerned with groundwater contaminant plume from waste landfill site with poorly known contaminant physical properties. The study results indicated that FPPA was capable of addressing vagueness or imprecision associated with probabilistic risk evaluation, and help generate risk outputs that could be elucidated under different possibilistic levels. The dual uncertainties could be effectively communicated into processes of environmental transport modeling, fuzzy transformation analysis, probabilistic risk assessment, and fuzzy risk quantification. The two applications also demonstrated the potential of FPPA for helping environmental managers to evaluate trade-offs involving risks and costs, as well as identify management solutions that sufficiently hedge against dual uncertainties.
In fact, many parameters for environmental transport modeling are subject to complex uncertainties. A stochastic parameter may be further complicated by vagueness in identifying the mean and standard deviation of its probability distribution function. This could occur due to application of multiple datasets (obtained at different measurement periods) for estimating a single stochastic parameter, or shortage of data for generating an accurate stochastic distribution. The study results indicated that the complex uncertain features had significant impacts on modeling and risk-assessment outputs; the degree of impacts of modeling parameters were highly dependent on the level of imprecision of these parameters. The conventional probabilistic risk assessment involves the calculation of only a single probability of the environmental loss in comparison with the related environmental standard, and is only a special case of FPPA applications.
The proposed methodology was able of managing uncertainties related with transport modeling parameters described by both probability density functions (PDFs) and fuzzy sets; it was an excellent vehicle in proving deviations sensitivity caused by modeling inputs on predictions of contaminant fate and transport and the related violation risks compared with the related environmental guidelines. This study would be strong basis for carrying on engineering design of environmental pollution control. Nevertheless, FPPA was also demonstrated some limitations and further investigations and improvement would be expected.
References
Baudrit C, Guyonnet D, Dubois D (2007) Joint propagation of variability and imprecision in assessing the risk of groundwater contamination. J Contam Hydrol 93:72–84
Blair AN, Ayyub BM, Bender WJ (2001) Fuzzy stochastic risk-based decision analysis with the mobile offshore base as a case study. Marine Struct 14:69–88
Bolster D, Barahona M, Dentz M, Fernandez-Garcia D, Sanchez-Vila X, Trinchero P, Valhondo C, Tartakovsky DM (2009) Probabilistic risk analysis of groundwater remediation strategies. Water Resour Res 45:W06413. doi:10.1029/2008WR007551
CEPA (China Environmental Protection Agency) (2002) Environmental quality standard for surface water (GB3838-2002). Beijing
Chen SQ (2000) Comparing probabilistic and fuzzy set approaches for design in the presence of uncertainty. Ph.D. Dissertation, Virginia Polytechnic Institute and State University, Blacksburg, VA, USA
Chen Z, Huang GH, Chakma A (2003) Hybrid fuzzy-stochastic modeling approach for assessing environmental risks at contaminated groundwater systems. J Environ Eng 129:79–88
Chu HJ, Chang LC (2009) Application of optimal control and fuzzy theory for dynamic groundwater remediation design. Water Resour Manage 23:647–660
Dubois D, Prade H (1988) Possibility theory: an approach to computerized processing of uncertainty. Plenum Press, New York
Ferson S, Ginzburg LR (1996) Different methods are needed to propagate ignorance and variability. Reliab Eng Syst Safe 54:133–144
Fishman GS (1995) Monte Carlo: concepts algorithms, and applications. Springer, New York
Freeze RA, Massmann JM, Smith L, Sperling T, James B (1990) Hydrogeological decision analysis: 1. A framework. Ground Water 28:738–766
Guo P, Huang GH (2009) Two-stage fuzzy chance-constrained programming: application to water resources management under dual uncertainties. Stoch Env Res Risk Assess 23:349–359
Gutiérrez S, Fernandez C, Barata C, Tarazona JV (2009) Forecasting risk along a river basin using a probabilistic and deterministic model for environmental risk assessment of effluents through ecotoxicological evaluation and GIS. Sci Total Environ 408:294–303
Guyonnet D, Côme B, Perrochet P, Parriaux A (1999) Comparing two methods for addressing uncertainty in risk assessment. J Environ Eng 125:660–666
Guyonnet D, Bourgine B, Dobois D, Fargier H, Côme B, Chilés JP (2003) Hybrid approach for addressing uncertainty in risk assessment. J Environ Eng 129:68–78
Hanss W (2002) The transformation method for the simulation and analysis of systems with uncertain parameters. Fuzzy Sets Syst 130:277–289
Hou Z, Rubin Y (2005) On minimum relative entropy concepts and prior compatibility issues in vadose zone inverse and forward modeling. Water Resour Res 41:W12425. doi:10.1029/2005WR004082
Hu BX, Huang H (2002) Stochastic analysis of reactive solute transport in heterogeneous, fractured porous media: a dual-permeability approach. Transp Porous Med 48:1–39
Huyakorn PS, Ungs MJ, Mulkey LA, Sudicky EA (1987) A three-dimensional analytical method for predicting leachate migration. Ground Water 25:588–598
James BR, Gorelick SM (1994) When enough is enough: the worth of monitoring data in aquifer remediation design. Water Resour Res 30:3499–3513
Kentel E, Aral MM (2004) Probabilistic-fuzzy health risk modeling. Stoch Env Res Risk Assess 18:324–338
Kentel E, Aral MM (2005) 2D Monte Carlo versus 2D fuzzy Monte Carlo health risk assessment. Stoch Env Res Risk Assess 19:86–96
Kentel E, Aral MM (2007) Risk tolerance measure for decision-making in fuzzy analysis: a health risk assessment perspective. Stoch Env Res Risk Assess 21:405–417
Khadam IM, Kaluarachehi JJ (2004) Probabilistic risk assessment and multi-criteria decision analysis for the management of contaminated subsurface environments. Dev Water Sci 55:1201–1213
Kikuchi S, Pursula M (1998) Treatment of uncertainty in study of transportation: fuzzy set theory and evidence theory. J Transp Eng 124:1–8
Kumar V, Mari M, Schuhmacher M, Domingo JL (2009) Partitioning total variance in risk assessment: application to a municipal solid waste incinerator. Environ Model Softw 24:247–261
Li JB, Huang GH, Chakma A, Zeng GM, Liu L (2003) Integrated fuzzy-stochastic modeling of petroleum contamination in subsurface. Energ Source 25:547–563
Li JB, Huang GH, Zeng GM, Maqsood I, Huang YF (2007) An integrated fuzzy-stochastic modeling approach for risk assessment of groundwater contamination. J Environ Manage 82:173–188
Liu L, Cheng SY, Guo HC (2004) A simulation-assessment modeling approach for analyzing environmental risks of groundwater contamination at waste landfill sites. Hum Ecol Risk Assess 10:373–388
Maqsood I, Li JB, Huang GH (2003) Inexact multiphase modeling system for the management of uncertainty in subsurface contamination. Pract Period Hazard Toxic Radioact Waste Manage 7:86–94
Massmann J, Freeze RA, Smith L, Sperling T, James B (1991) Hydrogeological decision analysis: 2 Applications to ground-water contamination. Ground Water 29:536–548
Maxwell RM, Kastenberg WE (1999a) A model for assessing and managing the risks of environmental lead emissions. Stoch Env Res Risk Assess 13:231–250
Maxwell RM, Kastenberg WE (1999b) Stochastic environmental risk analysis: an integrated methodology for predicting cancer risk from contaminated groundwater. Stoch Env Res Risk Assess 13:27–47
Maxwell RM, Kastenberg WE, Rubin Y (1999) A methodology to integrate site characterization information into groundwater-driven health risk assessment. Water Resour Res 35:2841–2855
Mckone TE, Deshpande AW (2005) Can fuzzy logic bring complex environmental problems into focus? Environ Sci Technol 2005(39):42A–47A
Mylopoulos YA, Theodosiou N, Mylopoulos NA (1999) A stochastic optimization approach in the design of an aquifer remediation under hydrogeologic uncertainty. Water Resour Manage 13:335–351
Qin XS, Huang GH (2009) An inexact chance-constrained quadratic programming model for stream water quality management. Water Resour Manage 23:661–695
Qin XS, Huang GH, Chakma A, Zeng GM, Xi BD (2007) A fuzzy composting process model. J Air Waste Manage Assoc 57:535–550
Qin XS, Huang GH, Li YP (2008) Risk management of BTEX contamination in ground water—an integrated fuzzy approach. Ground Water 46:755–767
Rubinstein RY, Kroese DP (2007) Simulation and the Monte Carlo method, 2nd ed. edn. John Wiley & Sons, New York
Sadiq R, Rodriguez MJ, Imran SA, Najjaran H (2007) Communicating human health risks associated with disinfection by-products in drinking water supplies: a fuzzy-based approach. Stoch Env Res Risk Assess 21:341–353
Seuntjens P (2002) Field-scale cadmium transport in a heterogeneous layered soil. Water Air Soil Pollut 140:401–423
Sperling T, Freeze RA, Massmann J, Smith L, James B (1992) Hydrogeological decision analysis: 3. Application to design of a ground-water control system at an open pit mine. Ground Water 30:376–389
Tartakovsky DM (2007) Probabilistic risk analysis in subsurface hydrology. Geophys Res Lett 34:L05404. doi:10.1029/2007GL029245(2007)
Terracini B (1996) Cancer hazard identification and qualitative risk assessment. Sci Total Environ 184:91–95
Thomann RV, Mueller JA (1987) Principles of surface water quality modeling and control. Harper & Row, New York
USEPA (2009) National primary drinking water regulations. EPA 816-F-09-0004, May 2009
Wood KL, Antonsson EK (1990) Modeling imprecision and uncertainty in preliminary engineering design. Mech Mach Theory 25:305–324
Woodbury AD, Ulrych TJ (1993) Minimum relative entropy: Forward probabilistic modeling. Water Resour Res 29:2847–2860
Yang AL, Huang GH, Qin XS (2010) An integrated simulation-assessment approach for evaluating health risks of groundwater contamination under multiple uncertainties. Water Resour Manage. doi:10.1007/s11269-010-9610-3.
Yeh GT (1981) AT123D: Analytical transient one-, two-, and three-dimensional simulation of waste transport in the aquifer system. Oak Ridge National Lab., Report No. ORNL-5602
Zadeh LA (1975) The concept of a linguistic variable and its application to approximate reasoning. Inf Sci 8:199–249
Acknowledgments
This research was supported by Nanyang Technological University (NTU) start-up grant (SUG-M58030007) and the DHI-NTU Water and Environment Research Centre. The author also deeply appreciates the reviewers and the editor for their insightful reviews. The provided comments/suggestions have contributed much to improving the manuscript.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Qin, X.S. Assessing environmental risks through fuzzy parameterized probabilistic analysis. Stoch Environ Res Risk Assess 26, 43–58 (2012). https://doi.org/10.1007/s00477-010-0454-4
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00477-010-0454-4