
Abstract
In this study, an interval-valued fuzzy linear programming with infinite α-cuts (IVFLP-I) method is developed for municipal solid waste (MSW) management under uncertainty. IVFLP-I can not only tackle uncertainties expressed as intervals and interval-valued fuzzy sets, but also take all fuzzy information into account by discretizing infinite α-cut levels to the interval-valued fuzzy membership functions. Through adoption of the interval-valued fuzzy sets, IVFLP-I can directly communicate information of waste managers’ confidence levels over various subjective judgments into the optimization process. Compared to the existing methods in which only finite α-cut levels exist, IVFLP-I would have enhanced the robustness in the optimization efforts. A MSW management problem is studied to illustrate the applicability of the proposed method. Four groups of optimal solutions can be obtained through assigning different intervals of α-cut levels. The results indicate that wider intervals of α-cut levels could lead to a lower risk level of constraint violation associated with a higher system cost; contrarily, narrower intervals of α-cut levels could lead to a lower cost with a higher risk of violating the constraints. The solutions under different intervals of α-cut levels can support in-depth analyses of tradeoffs between system costs and constraint-violation risks.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Municipal solid waste (MSW) management continues to be a major challenge for urban communities throughout the world due to the rising MSW generation rates, increasing environmental and health concerns, shrinking waste disposal capacities, and varying legislative and political conditions (Huang and Chang 2003). MSW can be recycled, composted, incinerated or buried at a landfill. No matter what techniques are used, MSW has to be transported to waste management facilities for disposal demand. Since the costs of waste transportation and treatment consume major portions of operating budgets for MSW management, identification of optimal waste-flow-allocation patterns with minimum cost is therefore an important aspect of MSW management planning (Huang et al. 2002). In MSW management systems, uncertainties exist in many related costs, impact factors and objectives, and are presented as interval, fuzzy and/or probability formats (Li et al. 2009). Such uncertainties can affect the related optimization processes and the generated decision schemes (Huang et al. 1993; Yeomans et al. 2003).
Consequently, a number of optimization methods dealing with uncertainties were developed for planning MSW management systems (Lee et al. 1991; Huang et al. 1992, 1994a, 1995b; Yeomans and Huang 2003; Zeng and Trauth 2005; Chang et al. 2005; Cai et al. 2007). Most of those methods could be classified into fuzzy, stochastic and interval mathematical programming (abbreviated as FMP, SMP and IMP).
FMP is effective in reflecting ambiguity and vagueness in resource availability by representing uncertainties as fuzzy sets, while FMP may either lead to complicated submodels that are not applicable to practical problems (Inuiguchi et al. 1990) or have difficulties in communicating the uncertainties directly into the optimization process (Huang et al. 1993). SMP can deal with various probabilistic uncertainties; however, the increased data requirements for specifying the parameters’ probability distributions can affect their practical applicability. In comparison, IMP has advantages in tackling uncertainties in the following aspects: (1) it allows uncertainties to be directly communicated into the optimization process; (2) it enables a relatively low computational requirement without complicated intermediate models; and (3) it does not require distributional information for uncertain parameters that can be difficult to specify in practical applications (Huang et al. 1992, 1995b). Nevertheless, IMP may become infeasible when the model’s left- and/or right-hand side parameters are highly uncertain. Therefore, several integrated IMP, SMP and FMP methods were developed to remedy each approach’s defects and maximize their merits (Huang et al. 1993, 1994b, 1995a, 2001; Maqsood and Huang 2003; Maqsood et al. 2005; Luo and Zhou 2007).
Robust programming (RP), based on fuzzy set theory, was proposed for dealing with uncertainties represented by possibilistic distributions in both left- and right-hand side coefficients (Dubios and Prade 1978, 1999a, b, c; Luhandjula and Gupta 1996; Vassiadou-Zeniou and Zenios 1996; Kunjur and Krishnamurty 1997; Dupacova 1998; Liu et al. 2003; Nie et al. 2007; Li et al. 2008). RP enhanced the robustness of the optimization process by delimiting an uncertain decision space through dimensional enlargement of the original fuzzy constraints; however, the main limitation of this method lay within its deterministic coefficients for the objective function, leading to potential losses of valuable uncertain information. Therefore, Nie et al. (2007) proposed a hybrid interval-parameter fuzzy robust programming approach that introduced a “fuzzy boundary interval” into the modeling framework for planning MSW management systems under uncertainty. The concept of “fuzzy boundary interval” enables the lower and upper bounds of interval parameters to be expressed as fuzzy sets instead of deterministic values; such a method could address uncertainties with complex presentations. Cai et al. (2009) developed an interval-valued fuzzy robust programming approach that explicitly addressed dual uncertainties expressed as interval-valued fuzzy sets; however, such an approach was solved based on an assumption that several α-cut levels were able to characterize all fuzzy information. In fact, an α-cut level represents a crisp approximation of the fuzzy set by relaxing the membership restriction to a degree α. The existing finite α-cut solution methods may lead to a high risk of constraint violation and generate unreliable solutions. This is because only a segment of fuzzy information from the specified α-cut levels can be considered, while other significant fuzzy information uncovered by these α-cut levels would be ignored. Consequently, all possible α-cut levels should be considered so that all fuzzy information can be communicated into the optimization process (Lu et al. 2009b).
Therefore, in this study, an interval-valued fuzzy linear programming with infinite α-cuts (IVFLP-I) approach will be developed in response to the above challenge. IVFLP-I can tackle uncertainties expressed as intervals and interval-valued fuzzy sets. An infinite α-cut solution method will be employed to solve IVFLP-I by discretizing all possible α-cut levels to the interval-valued fuzzy sets without unrealistic assumptions. The proposed method will then be applied to MSW management to demonstrate its applicability.
2 Methodology
Firstly, consider an interval-parameter linear programming (ILP) model as follows (Huang et al. 1993):
subject to:
where C ± j \( \in \) {R ±}1×n, A ± ij \( \in \) {R ±}m×n, B ± i \( \in \) {R ±}m×1, X ± j \( \in \) {R ±}n×1, and {R ±} denotes a set of interval parameters and/or decision variables; superscripts “–” and “+” represent lower and upper bounds of an interval, respectively. Obviously, the ILP approach can tackle uncertainties expressed as intervals with known lower and upper bounds. However, in many real-world problems, when human judgement is influential in the decision making process, fuzzy description is recognized as an effective tool to define the preference level of decision makers, while ILP can barely deal with the imprecise or vague information from the subjective assessment. Therefore, fuzzy linear programming (FLP) is introduced to handle ambiguous and vague information within the ILP framework. A FLP model with a deterministic objective function subject to constraints with fuzzy coefficients can be defined as follows (Delgado et al. 1989):
subject to:
where C j \( \in \) {R}1×n, X j \( \in \) {R}n×1, and {R} denotes a set of deterministic parameters and/or decision variables; \( \tilde{A}_{ij} \in \left\{ \Re \right\}^{m \times n} \), \( \tilde{B}_{i} \in \left\{ \Re \right\}^{m \times 1} \), and {ℜ} denotes a set of fuzzy sub-sets. A convex fuzzy set (\( \tilde{N} \)) can be defined on a real line (R) with a membership function of \( \mu_{{\tilde{N}}} ( \cdot ) \) such that its α-level set, \( \tilde{N}_{\alpha } \cong \left\{ {x \in R|\mu_{{\tilde{N}}} (x) \ge \alpha } \right\} \), forms an interval as follows (Fang et al. 1999):
where \( L_{{\tilde{N}}} (\alpha ) \cong \min \left\{ {x \in R|\mu_{{\tilde{N}}} (x) \ge \alpha } \right\} \) and \( R_{{\tilde{N}}} (\alpha ) \cong \max \left\{ {x \in R|\mu_{{\tilde{N}}} (x) \ge \alpha } \right\} \) are real-valued continuous functions in α \( \in \) [0, 1]. Figure 1 presents the membership function of convex fuzzy set (\( \tilde{N} \)).

Membership function of convex fuzzy set (\( \tilde{N} \))
According to Fang and Puthenpura (1993) and Fang et al. 1999), a fuzzy ranking method (as shown in Fig. 2) is introduced for the comparison of relations between two fuzzy sets. For \( \tilde{N}_{1} ,\,\tilde{N}_{2} \in F(\tilde{N}) \) and α \( \in \) [0, 1], we have \( \tilde{N}_{1} \le \tilde{N}_{2} \) if and only if:
where (\( \tilde{N} \)) is a fuzzy set defined on (R) with a membership function of \( \mu_{{\tilde{N}}} ( \cdot ) \). Accordingly, model (2) can be rewritten based on the fuzzy ranking method:
subject to:

Schematic presentation for \( \tilde{N}_{1} \) less than \( \tilde{N}_{2} \) under an α-cut
However, the FLP model cannot tackle uncertainties in the coefficients of the objective function. Thus, an interval fuzzy linear programming (IFLP) method is introduced to address uncertainties expressed as intervals and fuzzy sets through incorporating the FLP into the ILP framework. The IFLP model can be formulated as follows:
subject to:
where C ± j \( \in \) {R ±}1×n, X ± j \( \in \) {R ±}n×1, and {R ±} denotes a set of interval parameters and/or decision variables; \( \tilde{A}_{ij} \in \left\{ \Re \right\}^{m \times n} \), \( \tilde{B}_{i} \in \left\{ \Re \right\}^{m \times 1} \), and {ℜ} denotes a set of fuzzy sub-sets.
In real-world MSW management systems (Chang et al. 1997; Huang et al. 2001), however, the quality of uncertain information is often not satisfactory enough to be presented as intervals or conventional fuzzy sets with deterministic membership grades. Complex uncertainties may exist with high vagueness. For example, if waste managers do not have strong confidence in specifying a deterministic value for the membership grade of a fuzzy set, they would probably adopt an interval-valued fuzzy set with its membership grades expressed as intervals instead of deterministic values. The employment of interval-valued fuzzy sets can reflect waste managers’ confidence levels over subjective judgments on the uncertain parameters. Therefore, the conventional fuzzy sets have been effectively extended to the interval-valued fuzzy sets to describe imprecise information in their membership functions. The interval-valued fuzzy set can be defined as follows (Cai et al. 2009):
where A is an interval-valued fuzzy set defined on X, μ −A(x) \( \in \) [0, 1] represents the lower bound of the membership grade of A, and μ +A(x) \( \in \) [0, 1] denotes the upper bound of the membership grade of A. Thus, we have:
Figure 3 presents an interval-valued fuzzy set with a triangular membership function. As indicated in this figure, the membership grade can be expressed as interval [μ −A(x) , μ +A(x) ] for each number on the horizontal axis. The adoption of interval-valued fuzzy sets with their membership grades expressed as intervals could reflect waste managers’ confidence levels over the estimated parameters. The maximum membership grade (i.e. μ −A(x) = μ +A(x) = 1) is given to the most likely value (A 3) for the fuzzy set (\( \tilde{A}^{(I)} \)); it implies that the managers always have strong confidence in estimating the most likely values for uncertain parameters. An interval-valued fuzzy linear programming (IVFLP) model can be formulated through adoption of interval-valued fuzzy sets:
subject to:
where C ± j \( \in \) {R ±}1×n, X ± j \( \in \) {R ±}n×1, and {R ±} denotes a set of interval parameters and/or decision variables; \( \tilde{A}_{ij}^{(I)} \in \left\{ {\Re^{(I)} } \right\}^{m \times n} , \) \( \tilde{B}_{i}^{(I)} \in \left\{ {\Re^{(I)} } \right\}^{m \times 1} , \) and {ℜ(I)} denotes a set of interval-valued fuzzy sub-sets.

An interval-valued fuzzy set (\( \tilde{A}^{(I)} \))
For solving model (8), an infinite α-cut solution method would be employed to discretize the interval-valued fuzzy membership functions into infinite numbers of closed intervals. Such a solution method can communicate all fuzzy information into the optimization process without neglecting valuable uncertain information. Therefore, an interval-valued fuzzy linear programming with infinite α-cuts (IVFLP-I) model can be formulated as follows:
subject to:
where C ± j \( \in \) {R ±}1×n, X ± j \( \in \) {R ±}n×1, and {R ±} denotes a set of interval parameters and/or decision variables; j = 1, 2, …, n; {α 1, α 2, …, α r } \( \in \) [0, 1] where r corresponds to infinite α-cut levels; f ij (α) and b i (α) are real-valued continuous functions within \( \alpha \in [0,1]\), and:
Figure 4 provides a schematic representation of infinite α-cut levels for an interval-valued fuzzy set with a triangular membership function. Since infinite α-cut levels exist, as shown in model (9b), the original 2 m constraints can be converted to 2 m groups of constraints with each involving infinite sub-constraints. To solve such a problem, constraint (9b) needs to be further transformed to the following two sub-constraints based on the above-mentioned fuzzy ranking method:

Infinite α-cut levels for an interval-valued fuzzy set (\( \tilde{A}_{ij}^{(I)} \))
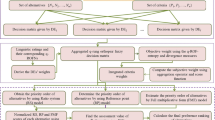
According to Lu et al. (2009a), problems (11a) and (11b) can then be, respectively, solved by a two-step infinite α-cut (TSI) solution method. Therefore, the proposed IVFLP-I model can not only tackle multiple uncertainties expressed as intervals and interval-valued fuzzy sets, but also communicate all fuzzy information into the optimization process. The general procedures for solving the IVFLP-I model can be summarized as follows:
Step 1 Formulate the IVFLP-I model.
Step 2 Reformulate the constraints that include interval-valued fuzzy sets in both left- and right-hand sides:
Step 3 Decompose the IVFLP-I model into two deterministic submodels (Huang et al. 1992), where a submodel corresponding to f−is first formulated when the objective function is to be minimized, and then that corresponding to f+ can be formulated based on solutions of the first submodel. In this study, submodel (1) corresponding to f− would be first formulated, since the system objective is to be minimized.
Step 4 Transform the constraints containing interval-valued fuzzy sets in submodel (1) to:
where \( \overline{{\tilde{A}_{i}^{[L,0]} }} \), \( \overline{{\tilde{A}_{i}^{[L,1]} }} \), \( \overline{{\tilde{B}_{i}^{[L,0]} }} \) and \( \overline{{\tilde{B}_{i}^{[L,1]} }} \) represent the upper bounds \( {\text{of}}\,\tilde{A}_{i}^{L} \) and \( \tilde{B}_{i}^{L} \) when their fuzzy membership grades equal 0 and 1, respectively.
Step 5 Solve submodel (1) and obtain the solutions of decision variables and objective function value (i.e., x − jopt and f − opt ).
Step 6 Formulate submodel (2) corresponding to f+ with an interactive constraint (i.e., x − jopt ≤ x + j ).
Step 7 Transform the constraints containing interval-valued fuzzy sets in submodel (2) to:
Step 8 Solve submodel (2) corresponding to f+ and obtain the solutions of decision variables and objective function value (i.e., x + jopt and f + opt ).
Step 9 Integrate the solutions of two submodels.
3 Case study
3.1 Statement of problems
Extensive uncertainties exist in MSW management systems due to their multi-period, multi-layer and multi-objective features associated with complexities in collection techniques to be used, service levels to be offered, and facilities to be adopted (Nie et al. 2007). For example, variations in socio-economic conditions, waste characteristics and geographical conditions may result in uncertainties in the estimated costs of waste collection, transportation, treatment and disposal, as well as the revenues from energy recovery. Moreover, the waste generation is uncertain since it is affected by many factors, such as economic development and population growth. In real-world MSW management problems, waste mangers often provide estimations of uncertain parameters based on historical data and experience. Uncertain information could be presented in multiple formats (e.g., intervals, possibilistic and probabilistic distributions).
In the study system under consideration, a landfill and a waste-to-energy (WTE) facility are available to serve the MSW treatment/disposal needs. The landfill is used to satisfy waste-disposal demand or to receive residues from other facilities; it typical has an overall cumulative capacity limit. The WTE facility has daily operating capacity limits. Therefore, compared to the landfill, the WTE facility is more vulnerable to overloaded flows (i.e., higher risk of system failure). The capacities of waste-management facilities in the system fluctuate within a range due to the existence of uncertainties. Moreover, the capacity of the WTE facility is usually subjectively estimated by waste managers, and could thus be presented as fuzzy sets.
Additionally, according to Arey and Baetz (1993), traffic congestion and waste buildup at waste-receiving facilities might cause serious system-reliability concerns. As to the WTE facility, the randomness in arrival time, unpredictable events (e.g., natural disasters, power failures and equipment maintenances) and service time of waste-delivery vehicles could lead to waste buildup. Although temporary waste-storage facilities might be used to mitigate such buildup, the risk of contingent incapability of the receiving facilities also exists. To tackle this problem, a safety coefficient is adopted in association with multiple factors (e.g., random arrivals of transportation vehicles, electricity failures, and natural disasters) for each waste-receiving facility with a limited capacity (Huang et al. 1995a, b). If a high safety coefficient is given, the system risk would be high which implies that the waste flow to the waste-receiving facility would probably exceed its capacity due to waste buildup in the previous days. In MSW management systems, the safety coefficient is usually subjectively estimated by managers, and is thus of fuzzy nature (Nie et al. 2007). To enhance the robustness of waste management plans, the managers’ confidence levels over subjective judgments or estimations could be reflected through interval-valued fuzzy sets (Cai et al. 2009). The conventional optimization methods are incapable of tackling multiple uncertainties and the associated complexities that exist in MSW management systems. Consequently, advanced inexact optimization methods are desired to communicate multiple uncertainties into the optimization processes.
3.2 Overview of the study system
To demonstrate the proposed IVFLP-I approach, a hypothetical problem is developed based on representative cost and technical data from solid waste management literature (Huang et al. 1992; Chang and Wang 1997; Chi and Huang 1998). In the study system, waste managers are responsible for allocating waste flows from three cities to two waste-receiving facilities, as illustrated in Fig. 5. Over a 15-year planning horizon (with three 5-year periods), an existing landfill and a waste-to-energy (WTE) facility are available to serve the waste treatment/disposal needs. The landfill site has an overall cumulative capacity limit of 4.58–4.63 million tonnes, while the WTE facility has a daily operating capacity limit. Figure 6 presents the capacity of the WTE facility and the safety coefficients (presented as interval-valued fuzzy sets). Table 1 shows the operation costs of two facilities, and the transportation costs for shipping the waste flows between the cities and the facilities. The WTE facility generates residues of 20–40% (on a mass basis) of the incoming waste stream. The revenue from the WTE facility is $15–25/tonne combusted (Nie et al. 2007). The waste-generation rates vary temporally and spatially. Table 2 shows the waste-generation rates (presented as intervals) in three cities during three time periods. The problem under consideration is how to effectively allocate the waste flows under a number of treatment/disposal constraints in order to minimize the overall system costs.

The study system

Safety coefficient (\( \tilde{\theta }_{k}^{(I)} \)) and capacity (\( T\tilde{E}^{(I)} \)) of the waste-to-energy (WTE) facility
3.3 Modeling formulation
In formulating the IVFLP-I model for MSW management, the decision variables represent waste flows from city j to facility i in period k. The objective is to minimize the total expected system cost by identifying optimal schemes of waste-flow allocation over the planning horizon; the constraints involve all relationships among the decision variables and the waste management conditions. Thus, the IVFLP-I model can be formulated as follows:
subject to:
[Landfill capacity constraint]
[WTE facility capacity constraints]
[Disposal of generated waste constraints]
[Non-negativity constraints] where f ± is the system cost; x ± ijk is the waste flow from city j to facility i during period k (tonne/day); TR ± ijk is the transportation costs from city j to facility i during period k (tonne/day); OP ± ik is the operating costs of facility i in period k ($/tonne); FE ± is the residue flow from the WTE facility to the landfill (% of incoming mass to WTE facility); FT ± k is the transportation costs of waste flow from the WTE facility to the landfill in period k ($/tonne); RE ± k is the revenue from the WTE facility in period k ($/tonne); TL ± is the capacity of landfill facility (tonne); \( \tilde{\theta }_{k}^{(I)} \) is the safety coefficient for the WTE facility during period k; \( T\tilde{E}_{{}}^{(I)} \) is the capacity of the WTE facility (tonne/day); WG ± jk is the waste generation rate in city j during period k (tonne/day); i is the index for facilities (i = 1 for the landfill, and i = 2 for the WTE facility); j is the index for cities (j = 1, 2, 3); k is the index for time periods (k = 1, 2, 3).
4 Result analysis
The optimal solutions obtained through the IVFLP-I model under α = [0, 1] are presented in Table 3. The results indicate that, in period 1, the majority of waste generated from Cities 1, 2 and 3 would be allocated to the landfill. The wastes to the landfill from Cities 1, 2 and 3 would be 200, 350 and 275 tonne/day, respectively. The waste flows to the WTE facility from Cities 1, 2 and 3 would all be [0, 50] tonne/day. Figure 7 summarizes the waste-flow-allocation patterns from the cities to the facilities over the planning horizon. The results imply that the operation costs would have significant impacts on the waste-flow-allocation strategy. The WTE facility is associated with a lower transportation cost and could produce revenues. However, the majority of the waste flows would be allocated to the landfill (instead of the WTE facility) because of the high operation cost of the WTE facility.

Waste-flow-allocation patterns from the interval-valued fuzzy linear programming with infinite α-cuts (IVFLP-I) model
In period 2, the optimized waste-flow-allocation pattern is similar to that in period 1. The landfill is still the first choice for waste disposal because of its low operation cost. The waste flows allocated to the landfill from Cities 1, 2 and 3 would be 225, [375.0, 388.9] and 300 tonne/day, respectively. Different from Cities 1 and 3, City 2 would ship ~90% of its waste to the landfill; this is because City 2 is closer to the landfill with a lower transportation cost.
In period 3, the waste-allocation pattern is different from those in periods 1 and 2. Due to the gradually increasing waste generation rate and the limited capacity of the landfill, the majority of waste from Cities 1 and 3 would have to be diverted to the WTE facility. The waste flows from City 1 to the WTE facility would be 250 tonne/day, with the remaining [0, 50] tonne/day being allocated to the landfill. Furthermore, City 3 would send [325.0, 326.9] tonne/day of its waste to the WTE facility, with the remaining [0, 48.1] tonne/day going to the landfill. Nevertheless, all waste from City 2 would be allocated to the landfill because of its proximity priority to the landfill.
The results presented above indicate that uncertainties could be communicated into the optimization process through the proposed IVFLP-I method. Table 3 presents the optimal solution of the objective function value ($[262.10, 519.68] × 106), which provides two extremes of the system cost over the planning horizon. The interval solution indicates that the total system cost would be $262.10 × 106 (lower-bound value) under optimistic conditions and $519.68 × 106 (upper-bound value) under demanding ones. The wide interval between the lower and upper bounds of the system cost is derived from the existence of uncertainties. A variety of decision alternatives can be generated by adjusting the decision variable values within their interval solutions. These decision alternatives help waste managers to identify desired waste-flow-allocation schemes according to their preferences and projected system conditions.
The problem could also be solved through the IVFLP-I model by assigning different intervals of α-cut levels. Table 3 presents various optimal solutions of IVFLP-I under four scenarios (i.e., α = [0, 1], α = [0.1, 0.9], α = [0.3, 0.8], α = [0.4, 0.7]). In period 1, the three cities would allocate almost all of their waste to the landfill because of its low operation costs, with merely a small portion going to the WTE facility under four scenarios. In period 2, the waste flows from City 2 to the landfill would be [375.0, 394.4], [375.0, 405.1] and [375.0, 410.5] tonne/day, with the remaining [0.0, 30.6], [0.0, 19.9] and [0.0, 14.5] tonne/day being allocated to the WTE facility when α = [0.1, 0.9], [0.3, 0.8], [0.4, 0.7]. In period 3, almost all waste from Cities 1 and 3 would be diverted to the WTE facility (instead of the landfill) because of the limited landfill capacity. However, City 2 would allocate all of its waste to the landfill because of its proximity priority to this facility. Comparatively, when the interval of α-cut levels varies from [0, 1] to [0.1, 0.9], [0.3, 0.8], [0.4, 0.7], there would be a gradually decreasing tendency of the waste flows allocated to the landfill from City 3 and an increasing tendency of the flows to the WTE facility from City 3. The results present that the optimal solutions would vary under different intervals of α-cut levels; however, there is no significantly difference between the solutions. This phenomenon indicates that the optimal allocation tendencies under four scenarios are similar to each other, although various solutions exist. The IVFLP-I can communicate all fuzzy information into the optimization process by considering infinite α-cut levels; therefore, it can generate relatively reliable solutions. However, when narrowing the interval of α-cut levels from [0, 1] to different intervals (e.g. α = [0.1, 0.9], α = [0.3, 0.8], α = [0.4, 0.7]), only a segment of fuzzy information can be considered in the optimization process. Under this circumstance, the fuzzy constraints are actually relaxed. Consequently, the solutions obtained from such a model are associated with a relatively high risk of violating the constraints; the optimal solutions would vary with the risk levels of constraint violation.
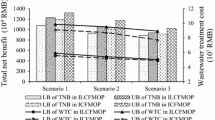
Figure 8 graphically presents the downward tendency of system costs under four scenarios. The results indicate that the cost under α = [0, 1] is highest, with a lower bound of $262.10 × 106 and an upper one of $519.68 × 106. Comparatively, the interval of system cost gradually becomes narrower along with shrinking intervals of α-cut levels. Although the system costs are becoming lower due to the relaxed constraints, such solutions could lead to an increased system risk. Therefore, the solutions associated with different risk levels of constraint violation are meaningful for supporting in-depth analyses of tradeoffs between system cost and system reliability.

System costs from the interval-valued fuzzy linear programming with infinite α-cuts (IVFLP-I) model
5 Discussion
Compared to the existing methods in which only finite α-cut levels exist, the developed IVFLP-I method has an advantage in discretizing infinite α-cut levels to the interval-valued fuzzy sets without ignoring significant fuzzy information. Although a low system cost can be obtained through finite α-cut solution methods, solutions with unrealistic assumptions can result in a high risk of constraint violation. In real-world MSW management problems, the α-cut levels are chosen by waste managers or through a random selection process. Wider intervals of α-cut levels could lead to a lower risk level of constraint violation associated with a higher system cost; contrarily, narrower intervals of α-cut levels could lead to a lower cost with a higher risk of violating the constraints. However, a high system cost without any constraint-violation risk is not always satisfactory; a considerable system cost with an acceptable risk level is more desirable.
Additionally, in many real-world problems, the quality of uncertain information is often not satisfactory enough to be presented as conventional fuzzy sets with deterministic membership grades. Complex uncertainties may exist with high vagueness. Thus, the developed IVFLP-I method can tackle dual uncertainties expressed as interval-valued fuzzy sets. They can reflect waste managers’ confidence levels over the estimated parameters. Consequently, IVFLP-I can help enhance the robustness of the optimization efforts.
The proposed IVFLP-I method is also applicable to other resources and environmental management systems that are associated with highly complex and uncertain information. Nevertheless, IVFLP-I has difficulties in dealing with large-scale problems that involve interactive and dynamic complexities. For example, IVFLP-I has difficulties in analyzing various policy scenarios associated with different environmental, economic and system-reliability conditions within a multi-stage context. Therefore, it will be necessary to integrate IVFLP-I with other optimization methods to enhance its capacity in dealing with more complex management problems.
6 Conclusions
In this study, an interval-valued fuzzy linear programming with infinite α-cuts (IVFLP-I) approach has been developed for planning the MSW management system under uncertainty. IVFLP-I can explicitly address multiple uncertainties expressed as intervals and interval-valued fuzzy sets. Through adoption of the interval-valued fuzzy sets, IVFLP-I can reflect waste managers’ confidence levels over the estimated parameters. Besides, IVFLP-I is able to communicate all fuzzy information into the optimization process by considering infinite α-cut levels, and can thus enhance the system robustness.
The developed IVFLP-I method has been applied to the planning of a MSW management system. The results indicate that useful solutions have been obtained. They can be used for generating a variety of decision alternatives through adjusting the decision variable values within their interval solutions. These decision alternatives can help waste managers to identify desired waste-flow-allocation schemes according to their preferences and projected system conditions. The study problem has also been solved through IVFLP-I by assigning different intervals of α-cut levels. The results indicate that willingness to pay a higher cost would guarantee the system safety; conversely, a desire to acquire a lower cost could run into a risk of violating the constraints. The solutions under different risk levels of constraint violation are meaningful for supporting an in-depth analysis of tradeoffs between economic efficiency and system reliability.
References
Arey MJ, Baetz BW (1993) Simulation modeling for the sizing of solid waste receiving facilities. Can J Civil Eng 20:220–227
Cai YP, Huang GH, Nie XH, Li YP, Tan Q (2007) Municipal solid waste management under uncertainty: a mixed interval parameter fuzzy-stochastic robust programming approach. Environ Eng Sci 24(3):338–352
Cai YP, Huang GH, Lu HW, Yang ZF, Tan Q (2009) I-VFRP: An interval-valued fuzzy robust programming approach for municipal waste-management planning under uncertainty. Eng Optim 41:399–418
Chang NB, Wang SF (1997) A fuzzy goal programming approach for the optimal planning of metropolitan solid waste management systems. Eur J Oper Res 32(4):303–321
Chang NB, Chen YL, Wang SF (1997) A fuzzy interval multiobjective mixed integer programming approach for the optimal planning of solid waste management systems. Fuzzy Sets Syst 89:35–59
Chang NB, Davila E, Dyson B, Brown R (2005) Optimal design for sustainable development of a recycling facility in a fast-growing urban setting. Waste Manage 25:833–846
Chi GF, Huang GH (1998) Long-term planning of integrated solid waste management system under uncertainty. University of Regina Report submitted to the City of Regina, Saskatchewan, Canada
Delgado M, Verdegay JL, Vila MA (1989) A general model for fuzzy linear programming. Fuzzy Sets Syst 29:21–29
Dubios D, Prade H (1978) Operations on fuzzy number. Int J Syst Sci 9:613–626
Dubios D, Prade H (1999a) A synthetic view of belief revision with uncertain inputs in the framework of possibility theory. Int J Approx Reason 17(2–3):295–306
Dubios D, Prade H (1999b) On fuzzy interpolation. Int J General Syst 28(2):103–112
Dubios D, Prade H (1999c) Qualitative possibility theory and its applications to constraint satisfaction and decision under uncertainty. Int J Intell Syst 14(1):45–53
Dupacova J (1998) Reflections on robust optimization. Lecture Notes in Economics and Mathematical Systems, vol 458, pp 111–127
Fang SC, Puthenpura SC (1993) Linear Optimization and Extensions: Theory and Algorithms. Prentice Hall, Englewood Cliffs, N.J
Fang SC, Hu CF, Wang HF (1999) Linear Programming with Fuzzy Coefficients in Constraints. Comput Math Appl 37:63–76
Huang GH, Chang NB (2003) The perspectives of environmental informatics and systems analysis. J Environ Inform 1:1–6
Huang GH, Baetz BW, Patry GG (1992) A grey linear programming approach for municipal solid waste management planning under uncertainty. Civil Eng Environ Syst 9:319–335
Huang GH, Baetz BW, Patry GG (1993) A grey fuzzy linear programming approach for municipal solid waste management planning under uncertainty. Civil Eng Environ Syst 10:123–146
Huang GH, Baetz BW, Patry GG (1994a) Grey dynamic programming for solid waste management planning under uncertainty. J Urban Plan Dev 120(3):132–156
Huang GH, Baetz BW, Patry GG (1994b) Grey chance-constrained programming: application to regional solid waste management planning. In: Hipel KW, Fang L (eds). Effective environmental management for sustainable development. Kluwer Academic
Huang GH, Baetz BW, Patry GG (1995a) Grey quadratic programming and its application to municipal solid waste management planning under uncertainty. Eng Optim 23:201–223
Huang GH, Baetz BW, Patry GG (1995b) Grey integer programming: An application to waste management planning under uncertainty. Eur J Oper Res 83:594–620
Huang GH, Sae-Lim N, Chen Z, Liu L (2001) Long-term planning of waste management system in the City of Regina–An integrated inexact optimization approach. Environ Model Assess 6:285–296
Huang YF, Baetz BW, Huang GH, Liu L (2002) Violation analysis for solid waste management systems: an interval fuzzy programming approach. J Environ Manage 65:431–446
Inuiguchi M, Ichihashi H, Tanaka H (1990) Fuzzy programming: a survey of recent developments. In: Slowinski R, Teghem J (eds) Stochastic versus fuzzy approaches to multiobjective mathematical programming under uncertainty. Kluwer Academic Publishers, Dordrechts, pp 45–70
Kunjur A, Krishnamurty S (1997) A robust multi-criteria optimization approach. Mech Mach Theory 32(7):797–810
Lee YW, Bogardi I, Stansbury J (1991) Fuzzy decision making in dredged-material management. J Environ Eng 117(2):614–628
Li YP, Huang GH, Nie XH, Nie SL (2008) A two-stage fuzzy robust integer programming approach for capacity planning of environmental management systems. Eur J Oper Res 189(2):399–420
Li YP, Huang GH, Yang ZF, Chen X (2009) Inexact fuzzy-stochastic constraint-softened programming–A case study for waste management. Waste Manage 29:2165–2177
Liu L, Huang GH, Liu Y, Fuller GA (2003) A fuzzy-stochastic robust programming model for regional air quality management under uncertainty. Eng Optim 35(2):177–199
Lu HW, Huang GH, Lin YP, He L (2009a) A two-Step infinite α-cuts fuzzy linear programming method in determination of optimal allocation strategies in agricultural irrigation systems. Water Resour Manage 23:2249–2269
Lu HW, Huang GH, He L (2009b) A semi-infinite analysis-based inexact two-stage stochastic fuzzy linear programming approach for water resources management. Eng Optim 41:73–85
Luhandjula MK, Gupta MM (1996) On fuzzy stochastic optimization. Fuzzy Sets Syst 81:47–55
Luo B, Zhou DC (2007) Planning hydroelectric resources with recourse-based multistage interval-stochastic programming. Stoch Env Res Risk Assess 23:65–73
Maqsood I, Huang GH (2003) A two-stage interval-stochastic programming model for waste management under uncertainty. J Air Waste Manage Assoc 53:540–552
Maqsood I, Huang GH, Huang YF, Chen B (2005) ITOM: an interval parameter two-stage optimization mode for stochastic planning of water resources systems. Stoch Env Res Risk Assess 19(2):125–133
Nie XH, Huang GH, Li YP, Liu L (2007) IFRP: A hybrid interval-parameter fuzzy robust programming approach for waste management planning under uncertainty. J Environ Manage 84(1):1–11
Vassiadou-Zeniou C, Zenios SA (1996) Robust optimization models for managing callable bond portfolios. Eur J Oper Res 91:264–273
Yeomans JS, Huang GH (2003) An evolutionary grey, hop, skip, and jump approach: Generating alternative policies for the expansion of waste management. J Environ Inform 1:37–51
Yeomans JS, Huang GH, Yoogalingam R (2003) Combining simulation with evolutionary algorithms for optimal planning under uncertainty: an application to municipal solid waste management planning in the Regional Municipality of Hamilton–Wentworth. J Environ Inform 2:11–30
Zeng Y, Trauth KM (2005) Internet-based fuzzy multicriteria decision support system for planning integrated solid waste management. J Environ Inform 6:1–15
Acknowledgments
The research was supported by the Major State Basic Research Development Program of MOST (2005CB724207), and the Natural Sciences and Engineering Research Council of Canada. The authors are grateful to the editors and the anonymous reviewers for their insightful comments and suggestions.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Wang, S., Huang, G.H., Lu, H.W. et al. An interval-valued fuzzy linear programming with infinite α-cuts method for environmental management under uncertainty. Stoch Environ Res Risk Assess 25, 211–222 (2011). https://doi.org/10.1007/s00477-010-0432-x
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00477-010-0432-x