
Abstract
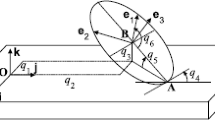
A fully covariant description, based on the consideration of contact from the surface geometry point of view, is used for a consistent formulation of frictional contact conditions. All necessary operations for the description of the contact problems: kinematics, all differential operations etc. are defined in the covariant form in the local coordinate system which corresponds to the closest point procedure. The main advantage is a geometrical structure of the full tangent matrix, which is is subdivided into main, rotational and curvature parts. The consistent linearization of the penalty regularized contact integral leads to a symmetrical tangent matrix in the case of sticking. Representative examples show the effectiveness of the approach for problems where the definition of sticking-sliding zones is necessary as well as for the case of fully developed sliding zones.
Article PDF
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Schweizerhof, K., Konyukhov, A. Covariant description for frictional contact problems. Comput Mech 35, 190–213 (2005). https://doi.org/10.1007/s00466-004-0616-7
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00466-004-0616-7