
Abstract
We characterise finite and infinitesimal rigidity for bar-joint frameworks in \({\mathbb {R}}^d\) with respect to polyhedral norms (i.e. norms with closed unit ball \({\mathcal {P}}\), a convex d-dimensional polytope). Infinitesimal and continuous rigidity are shown to be equivalent for finite frameworks in \({\mathbb {R}}^d\) which are well-positioned with respect to \({\mathcal {P}}\). An edge-labelling determined by the facets of the unit ball and placement of the framework is used to characterise infinitesimal rigidity in \({\mathbb {R}}^d\) in terms of monochrome spanning trees. An analogue of Laman’s theorem is obtained for all polyhedral norms on \({\mathbb {R}}^2\).
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
A bar-joint framework in \({\mathbb {R}}^d\) is a pair (G, p) consisting of a simple undirected graph \(G=(V(G),E(G))\) (i.e. no loops or multiple edges) and a placement \(p:V(G)\rightarrow {\mathbb {R}}^d\) of the vertices such that \(p_v\) and \(p_w\) are distinct whenever vw is an edge of G. The graph G may be either finite or infinite. Given a norm on \({\mathbb {R}}^d\) we are interested in determining when a given framework can be continuously and non-trivially deformed without altering the lengths of the bars. A well-developed rigidity theory exists in the Euclidean setting for finite bar-joint frameworks (and their variants), which stems from classical results of Cauchy [6], Maxwell [17], Alexandrov [1] and Laman [14]. Of particular relevance is Laman’s landmark characterisation for generic minimally infinitesimally rigid finite bar-joint frameworks in the Euclidean plane. Asimow and Roth proved the equivalence of finite and infinitesimal rigidity for regular bar-joint frameworks in two key papers [2, 3]. A modern treatment can be found in works of Graver et al. [9] and Whiteley [24, 26]. More recently, significant progress has been made in topics such as global rigidity [7, 8, 11] and the rigidity of periodic frameworks [5, 16, 20, 21] in addition to newly emerging themes such as symmetric frameworks [22] and frameworks supported on surfaces [19]. In this article, we consider rigidity properties of both finite and infinite bar-joint frameworks (G, p) in \({\mathbb {R}}^d\) with respect to polyhedral norms. A norm on \({\mathbb {R}}^d\) is polyhedral (or a block norm) if the closed unit ball \(\{x\in {\mathbb {R}}^d:\Vert x\Vert \le 1\}\) is the convex hull of a finite set of points. Such norms form an important class as they are computationally easy to use and are dense in the set of all norms on \({\mathbb {R}}^d\). While classical rigidity theory is strongly linked to statics, it has also provided valuable new connections between different areas of pure mathematics and this latter property is one of the emerging features of non-Euclidean rigidity theory. In particular, the rigidity theory obtained with polyhedral norms is distinctly different from the Euclidean setting in admitting new edge-labelling and spanning tree methods. There are potential applications of this theory to physical networks with inherent directional constraints, or to abstract networks with a suitable notion of distance imposed. Non-Euclidean norms, and in particular polyhedral norms, have been applied in this way to optimisation problems in location modelling (see the industry which has resulted from [23]) and, more recently, machine learning with submodular functions [4]. A study of rigidity with respect to the classical non-Euclidean \(\ell ^p\) norms was initiated in [12] for finite bar-joint frameworks and further developed for infinite bar-joint frameworks in [13]. Among these norms the \(\ell ^1\) and \(\ell ^\infty \) norms are simple examples of polyhedral norms and so the results obtained here extend some of the results of [12].
In Sect. 2, we provide the relevant background material on polyhedral norms and finite and infinitesimal rigidity. In Sect. 3, we establish the role of support functionals in determining the space of infinitesimal flexes of a bar-joint framework (Theorem 5). We then distinguish between general bar-joint frameworks and those which are well-positioned with respect to the unit ball. The well-positioned placements of a finite graph are open and dense in the set of all placements, and we show that finite and infinitesimal rigidity are equivalent for these bar-joint frameworks (Theorem 7). We then introduce the rigidity matrix for a general finite bar-joint framework, the non-zero entries of which are derived from extreme points of the polar set of the unit ball. In Sect. 4, we apply an edge-labelling to G which is induced by the placement of each bar in \({\mathbb {R}}^d\) relative to the facets of the unit ball. With this edge-labelling we identify necessary conditions for infinitesimal rigidity and obtain a sufficient condition for a subframework to be relatively infinitesimally rigid (Proposition 12). We then characterise the infinitesimally rigid bar-joint frameworks with d induced framework colours as those which contain monochrome spanning trees of each framework colour (Theorem 13). This result holds for both finite and infinite bar-joint frameworks and does not require the framework to be well-positioned. In Sect. 5, we apply the spanning tree characterisation to show that certain graph moves preserve minimal infinitesimal rigidity for any polyhedral norm on \({\mathbb {R}}^2\). We then show that in two dimensions a finite graph has a well-positioned minimally infinitesimally rigid placement if and only if it satisfies the counting conditions \(|E(G)|=2|V(G)|-2\) and \(|E(H)|\le 2|V(H)|-2\) for all subgraphs H (Theorem 23). This is an analogue of Laman’s theorem [14] which characterises the finite graphs with minimally infinitesimally rigid generic placements in the Euclidean plane as those which satisfy the counting conditions \(|E(G)|=2|V(G)|-3\) and \(|E(H)|\le 2|V(H)|-3\) for subgraphs H with at least two vertices. Many of the results obtained hold equally well for both finite and infinite bar-joint frameworks.
2 Preliminaries
Let \({\mathcal {P}}\) be a convex symmetric d-dimensional polytope in \({\mathbb {R}}^d\) where \(d\ge 2\). Following [10] we say that a proper face of \({\mathcal {P}}\) is a subset of the form \({\mathcal {P}}\cap H\), where H is a supporting hyperplane for \({\mathcal {P}}\). A facet of \({\mathcal {P}}\) is a proper face which is maximal with respect to inclusion. The set of extreme points (vertices) of \({\mathcal {P}}\) is denoted by \(\mathrm{ext}({\mathcal {P}})\). The polar set of \({\mathcal {P}}\), denoted by \({\mathcal {P}}^\triangle \), is also a convex symmetric d-dimensional polytope in \({\mathbb {R}}^d\):
Moreover, there exists a bijective map which assigns to each facet F of \({\mathcal {P}}\) a unique extreme point \(\hat{F}\) of \({\mathcal {P}}^\triangle \) such that
The polar set of \({\mathcal {P}}^\triangle \) is \({\mathcal {P}}\).
The Minkowski functional (or gauge) for \({\mathcal {P}}\) defines a norm on \({\mathbb {R}}^d\),
This is what is known as a polyhedral norm or a block norm. The dual norm of \(\Vert \cdot \Vert _{\mathcal {P}}\) is also a polyhedral norm and is determined by the polar set \({\mathcal {P}}^\triangle \),
In general, a linear functional on a convex polytope will achieve its maximum value at some extreme point of the polytope and so the polyhedral norm \(\Vert \cdot \Vert _{\mathcal {P}}\) is characterised by
A point \(x\in {\mathbb {R}}^d\) belongs to the conical hull \({\text {cone}}(F)\) of a facet F if \(x= \sum _{j=1}^n\lambda _jx_j\) for some non-negative scalars \(\lambda _j\) and some finite collection \(x_1,x_2\ldots ,x_n\in F\). By formulas (1), (2) and (3) the following equivalence holds:
Each isometry of the normed space \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\) is affine (by the Mazur–Ulam theorem) and hence is a composition of a linear isometry and a translation. A linear isometry must leave invariant the finite set of extreme points of \({\mathcal {P}}\) and is completely determined by its action on any d linearly independent extreme points. Thus there exist only finitely many linear isometries on \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\).
A continuous rigid motion of a normed space \(({\mathbb {R}}^d,\Vert \cdot \Vert )\) is a family of continuous paths,
with the property that \(\alpha _x(0)=x\) and for every pair \(x,y\in {\mathbb {R}}^d\) the distance \(\Vert \alpha _x(t)-\alpha _y(t)\Vert \) remains constant for all values of t. In the case of a polyhedral norm \(\Vert \cdot \Vert _{\mathcal {P}}\), if \(\delta \) is sufficiently small, then the isometries \(\varGamma _t:x\mapsto \alpha _x(t)\) are necessarily translational since by continuity the linear part must equal the identity transformation. Thus we may assume that a continuous rigid motion of \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\) is a family of continuous paths of the form
for some continuous function \(c:(-\delta ,\delta )\rightarrow {\mathbb {R}}^d\) (cf. [13, Lemma 6.2]).
An infinitesimal rigid motion of a normed space \(({\mathbb {R}}^d,\Vert \cdot \Vert )\) is a vector field on \({\mathbb {R}}^d\) which arises from the velocity vectors of a continuous rigid motion. For a polyhedral norm \(\Vert \cdot \Vert _{\mathcal {P}}\), since the continuous rigid motions are of translational type, the infinitesimal rigid motions of \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\) are precisely the constant maps
for some \(a\in {\mathbb {R}}^d\) (cf. [12, Lemma 2.3]).
Let (G, p) be a (finite or infinite) bar-joint framework in a normed vector space \(({\mathbb {R}}^d,\Vert \cdot \Vert )\). A continuous (or finite) flex of (G, p) is a family of continuous paths
such that \(\alpha _v(0)=p_v\) for each vertex \(v\in V(G)\) and \(\Vert \alpha _v(t)-\alpha _w(t)\Vert =\Vert p_v-p_w\Vert \) for all \(|t|<\delta \) and each edge \(vw\in E(G)\). A continuous flex of (G, p) is regarded as trivial if it arises as the restriction of a continuous rigid motion of \(({\mathbb {R}}^d,\Vert \cdot \Vert )\) to p(V(G)). If every continuous flex of (G, p) is trivial then we say that (G, p) is continuously rigid.
An infinitesimal flex of a (finite or infinite) bar-joint framework (G, p) in a normed space \(({\mathbb {R}}^d,\Vert \cdot \Vert )\) is a map \(u:V(G)\rightarrow {\mathbb {R}}^d\), \(v\mapsto u_v\) which satisfies
for each edge \(vw\in E(G)\). We will denote the collection of infinitesimal flexes of (G, p) by \({\mathcal {F}}(G,p)\). An infinitesimal flex of (G, p) is regarded as trivial if it arises as the restriction of an infinitesimal rigid motion of \(({\mathbb {R}}^d,\Vert \cdot \Vert )\) to p(V(G)). In other words, in the case of a polyhedral norm, an infinitesimal flex of (G, p) is trivial if and only if it is constant. A bar-joint framework is infinitesimally rigid if every infinitesimal flex of (G, p) is trivial. Regarding \({\mathcal {F}}(G,p)\) as a real vector space with component-wise addition and scalar multiplication, the trivial infinitesimal flexes of (G, p) form a d-dimensional subspace \({\mathcal {T}}(G,p)\) of \({\mathcal {F}}(G,p)\).
The interior of a subset \(A\subset {\mathbb {R}}^d\) will be denoted by \(A^\circ \).
3 Support Functionals and Rigidity
In this section, we begin by highlighting the connection between the infinitesimal flex condition (5) for a general norm on \({\mathbb {R}}^d\) and support functionals on the normed space \(({\mathbb {R}}^d,\Vert \cdot \Vert )\). We then characterise the space of infinitesimal flexes for a general (finite or infinite) bar-joint framework in \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\) in terms of support functionals and prove the equivalence of finite and infinitesimal rigidity for finite bar-joint frameworks which are well-positioned in \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\). Following this, we describe the rigidity matrix for general finite bar-joint frameworks in \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\) and compute an example.
3.1 Support Functionals
Let \(\Vert \cdot \Vert \) be an arbitrary norm on \({\mathbb {R}}^d\), and denote by B the closed unit ball in \(({\mathbb {R}}^d,\Vert \cdot \Vert )\). A linear functional \(f:{\mathbb {R}}^d\rightarrow {\mathbb {R}}\) is a support functional for a point \(x_0\in {\mathbb {R}}^d\) if \(f(x_0)=\Vert x_0\Vert ^2\) and \(\Vert f\Vert ^*=\Vert x_0\Vert \). Equivalently, f is a support functional for \(x_0\) if the hyperplane
is a supporting hyperplane for B which contains \(\tfrac{x_0}{\Vert x_0\Vert }\).
Lemma 1
Let \(\Vert \cdot \Vert \) be a norm on \({\mathbb {R}}^d\) and let \(x_0\in {\mathbb {R}}^d\). If \(f:{\mathbb {R}}^d\rightarrow {\mathbb {R}}\) is a support functional for \(x_0\), then
and
for all \(y\in {\mathbb {R}}^d\).
Proof
Since f is linear and \(f(x_0)=\Vert x_0\Vert ^2\), we have for all \(y\in {\mathbb {R}}^d\),
If \(t>0\), then since \(f(x)\le \Vert x_0\Vert \Vert x\Vert \) for all \(x\in {\mathbb {R}}^d\) we have
If \(t<0\), then applying the above inequality
\(\square \)
Let (G, p) be a (finite or infinite) bar-joint framework in \(({\mathbb {R}}^d,\Vert \cdot \Vert )\), and fix an orientation for each edge \(vw\in E(G)\). We denote by \({\text {supp}}(vw)\) the set of all support functionals for \(p_v-p_w\). (The choice of orientation on the edges of G is for convenience only and has no bearing on the results that follow. Alternatively, we could avoid choosing an orientation by defining \({\text {supp}}(vw)\) to be the set of all linear functionals which are support functionals for either \(p_v-p_w\) or \(p_w-p_v\).)
Proposition 2
If (G, p) is a (finite or infinite) bar-joint framework in \(({\mathbb {R}}^d,\Vert \cdot \Vert )\) and \(u:V(G)\rightarrow {\mathbb {R}}^d\) is an infinitesimal flex of (G, p), then
for each edge \(vw\in E(G)\).
Proof
Let \(vw\in E(G)\) and suppose f is a support functional for \(p_v-p_w\). Applying Lemma 1 with \(x_0=p_v-p_w\) and \(y=u_v-u_w\), we have
Since u is an infinitesimal flex of (G, p), \(\lim _{t\rightarrow 0}\tfrac{1}{t}(\Vert x_0+ty\Vert -\Vert x_0\Vert )=0\) and so \(f(y)=0\). \(\square \)
Let \(\Vert \cdot \Vert _{\mathcal {P}}\) be a polyhedral norm on \({\mathbb {R}}^d\). For each facet F of \({\mathcal {P}}\), denote by \(\varphi _F\) the linear functional
Lemma 3
Let \(\Vert \cdot \Vert _{\mathcal {P}}\) be a polyhedral norm on \({\mathbb {R}}^d\), let F be a facet of \({\mathcal {P}}\) and let \(x_0\in {\mathbb {R}}^d\). Then \(x_0\in {\text {cone}}(F)\) if and only if the linear functional
is a support functional for \(x_0\).
Proof
If \(x_0\in {\text {cone}}(F)\), then by formula (4) \(\varphi _{F,x_0}\left( x_0\right) =\Vert x_0\Vert _{\mathcal {P}}^2\). By (1), we have \(\varphi _{F,x_0}(x)\le \Vert x_0\Vert _{\mathcal {P}}\) for each \(x\in {\mathcal {P}}\), and it follows that \(\varphi _{F,x_0}\) is a support functional for \(x_0\). Conversely, if \(x_0\notin {\text {cone}}(F)\), then by (4) \(\varphi _{F,x_0}(x_0)<\Vert x_0\Vert _{\mathcal {P}}^2\) and so \(\varphi _{F,x_0}\) is not a support functional for \(x_0\). \(\square \)
For each oriented edge \(vw\in E(G)\), we denote by \({\text {supp}}_\varPhi (vw)\) the set of all linear functionals \(\varphi _F\) which are support functionals for \(\tfrac{p_v-p_w}{\Vert p_v-p_w\Vert _{\mathcal {P}}}\).
Proposition 4
Let (G, p) be a finite bar-joint framework in \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\). If a mapping \(u:V(G)\rightarrow {\mathbb {R}}^d\) satisfies
for each edge \(vw\in E(G)\), then there exists \(\delta >0\) such that the family
is a finite flex of (G, p).
Proof
Let \(vw\in E(G)\) and write \(x_0=p_v-p_w\) and \(u_0=u_v-u_w\). If \(\varphi _{F}\) is a support functional for \(\tfrac{x_0}{\Vert x_0\Vert _{{\mathcal {P}}}}\), then by the hypothesis \(\varphi _F(u_0)=0\). By Lemma 3, \(x_0\) is contained in the conical hull of the facet F. Applying formulas (3) and (4),
By continuity, there exists \(\delta _{vw}>0\) such that for all \(|t|<\delta _{vw}\)
Since G is a finite graph, the result holds with \(\delta =\min _{vw\in E(G)}\delta _{vw}>0\). \(\square \)
The following is a characterisation of the space of infinitesimal flexes of a general bar-joint framework in \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\).
Theorem 5
Let (G, p) be a (finite or infinite) bar-joint framework in \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\). Then a mapping \(u:V(G)\rightarrow {\mathbb {R}}^d\) is an infinitesimal flex of (G, p) if and only if
for each edge \(vw\in E(G)\).
Proof
If u is an infinitesimal flex of (G, p), then the result follows from Proposition 2. For the converse, let \(vw\in E(G)\) and write \(x_0=p_v-p_w\) and \(u_0=u_v-u_w\). Applying the argument in the proof of Proposition 4, there exists \(\delta _{vw}>0\) with \(\Vert x_0+tu_0\Vert _{\mathcal {P}}=\Vert x_0\Vert _{\mathcal {P}}\) for all \(|t|<\delta _{vw}\). Hence u is an infinitesimal flex of (G, p). \(\square \)
3.2 Equivalence of Finite and Infinitesimal Rigidity
A placement of a simple graph G in \({\mathbb {R}}^d\) is a map \(p:V(G)\rightarrow {\mathbb {R}}^d\) for which \(p_v\not =p_w\) whenever \(vw\in E(G)\). A placement \(p:V(G)\rightarrow {\mathbb {R}}^d\) is well-positioned with respect to a polyhedral norm on \({\mathbb {R}}^d\) if \(p_v-p_w\) is contained in the conical hull of exactly one facet of the unit ball \({\mathcal {P}}\) for each edge \(vw\in E(G)\). We denote this unique facet by \(F_{vw}\). In the following discussion, G is a finite graph and each placement is identified with a point \(p=(p_v)_{v\in V(G)}\) in the product space \(\prod _{v\in V(G)}{\mathbb {R}}^{d}\) which we regard as having the usual topology. The set of all well-positioned placements of G in \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\) is an open and dense subset of this product space. The configuration space for a bar-joint framework (G, p) is defined as
Proposition 6
Let (G, p) be a finite and well-positioned bar-joint framework in \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\) with \(p_v-p_w\in {\text {cone}}(F_{vw})\) for each \(vw\in E(G)\). Then there exists a neighbourhood U of p in \(\prod _{v\in V(G)}{\mathbb {R}}^{d}\) such that
-
(i)
if \(x\in U\), then \(x_v-x_w\in {\text {cone}}(F_{vw})\) for each edge \(vw\in E(G)\),
-
(ii)
(G, x) is a well-positioned bar-joint framework for each \(x\in U\) and
-
(iii)
\(V(G,p)\cap U = \{x\in U: \varphi _{F_{vw}}(x_{v}-x_{w})=\varphi _{F_{vw}}(p_{v}-p_{w}) \,\, {\text {for all}} \,\,vw\in E(G)\}\).
In particular, \(V(G,p)\cap U= (p+{\mathcal {F}}(G,p))\cap U\).
Proof
Let \(vw\in E(G)\) be an oriented edge and consider the continuous map
Since (G, p) is well-positioned, \(p_v-p_{w}\) is an interior point of the conical hull of a unique facet \(F_{vw}\) of \({\mathcal {P}}\). The preimage \(T_{vw}^{-1}({\text {cone}}(F_{vw})^\circ )\) is an open neighbourhood of p. Since G is a finite graph, the intersection
is an open neighbourhood of p which satisfies (i), (ii) and (iii).
Since (G, p) is well-positioned, by Lemma 3, there is exactly one support functional in \({\text {supp}}_\varPhi (vw)\) for each edge vw and this functional is given by \(\varphi _{F_{vw}}\). If \(x\in U\), then define \(u=(u_v)_{v\in V(G)}\) by setting \(u_v=x_v-p_v\) for each \(v\in V(G)\). By (iii), \(x\in V(G,p)\cap U\) if and only if \(x\in U\) and
for each edge \(vw\in E(G)\). By Theorem 5, the latter identity is equivalent to the condition that u is an infinitesimal flex of (G, p). Thus \(x\in V(G,p)\cap U\) if and only if \(x\in U\) and \(x-p\in {\mathcal {F}}(G,p)\). \(\square \)
We now prove the equivalence of continuous rigidity and infinitesimal rigidity for finite well-positioned bar-joint frameworks.
Theorem 7
Let (G, p) be a finite well-positioned bar-joint framework in a normed space \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\), where \(\Vert \cdot \Vert _{\mathcal {P}}\) is a polyhedral norm. Then the following statements are equivalent:
-
(i)
(G, p) is continuously rigid.
-
(ii)
(G, p) is infinitesimally rigid.
Proof
\(\mathrm{{(i)}}\Rightarrow \mathrm{{(ii)}}\). If \(u=(u_v)_{v\in V(G)}\in {\mathcal {F}}(G,p)\) is an infinitesimal flex of (G, p), then by Theorem 5 and Proposition 4, the family
is a finite flex of (G, p) for some \(\varepsilon >0\). Since (G, p) is continuously rigid, this finite flex must be trivial. Thus there exist \(\delta >0\) and a continuous path \(c:(-\delta ,\delta )\rightarrow {\mathbb {R}}^d\) such that \(\alpha _v(t)=p_v+c(t)\) for all \(|t|<\delta \) and all \(v\in V(G)\). Now \(u_v=\alpha _v'(0)=c'(0)\) for all \(v\in V(G)\) and so u is a constant, and hence trivial, infinitesimal flex of (G, p). We conclude that (G, p) is infinitesimally rigid.
\(\mathrm{{(ii)}}\Rightarrow \mathrm{{(i)}}\). If (G, p) has a finite flex given by the family
then consider the continuous path
By Proposition 6, \(V(G,p)\cap U=(p+{\mathcal {F}}(G,p))\cap U\) for some neighbourhood U of p. Since \(\alpha (0)=p\), there exists \(\delta >0\) such that \(\alpha (t)\in V(G,p)\cap U\) for all \(|t|<\delta \). Choose \(t_0\in (-\delta ,\delta )\) and define
Then \(u=\alpha (t_0)-p\in {\mathcal {F}}(G,p)\) is an infinitesimal flex of (G, p). Since (G, p) is infinitesimally rigid, u must be a trivial infinitesimal flex. Hence \(u_v=c(t_0)\) for all \(v\in V(G)\) and some \(c(t_0)\in {\mathbb {R}}^d\). Apply the same argument to show that for each \(|t|<\delta \) there exists c(t) such that \(\alpha _v(t) = p_v+c(t)\) for all \(v\in V(G)\). Note that \(c:(-\delta , \delta )\rightarrow {\mathbb {R}}^d\) is continuous and so \(\{\alpha _v:v\in V(G)\}\) is a trivial finite flex of (G, p). We conclude that (G, p) is continuously rigid. \(\square \)
The non-equivalence of finite and infinitesimal rigidity for general finite bar-joint frameworks in \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\) is demonstrated in Example 9.
3.3 The Rigidity Matrix
We define the rigidity matrix \(R_{\mathcal {P}}(G,p)\) for a finite bar-joint framework (G, p) in \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\) as follows: Fix an ordering of the vertices V(G) and edges E(G) and choose an orientation on the edges of G. For each vertex v, assign d columns in the rigidity matrix and label these columns \(p_{v,1},\ldots ,p_{v,d}\). For each directed edge \(vw\in E(G)\) and each facet F with \(p_v-p_w\in {\text {cone}}(F)\), assign a row in the rigidity matrix and label this row by (vw, F). The entries for the row (vw, F) are given by

where \(p_v-p_w\in {\text {cone}}(F)\) and \(\hat{F}=(\hat{F}_1,\ldots ,\hat{F}_d)\in {\mathbb {R}}^d\). If (G, p) is well-positioned, then the rigidity matrix has size \(|E(G)|\times d|V(G)|\).
Proposition 8
Let (G, p) be a finite bar-joint framework in \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\). Then
-
(i)
\({\mathcal {F}}(G,p)\cong \ker R_{\mathcal {P}}(G,p)\).
-
(ii)
(G, p) is infinitesimally rigid if and only if \({\text {rank}}~R_{\mathcal {P}}(G,p)= d|V(G)|-d\).
Proof
The system of equations in Theorem 5 is expressed by the matrix equation \(R_{\mathcal {P}}(G,p)u^\mathrm{{T}}=0\) where we identify \(u:V(G)\rightarrow {\mathbb {R}}^d\) with a row vector \((u_{v_1},\ldots ,u_{v_n})\in {\mathbb {R}}^{d|V(G)|}\). Thus \({\mathcal {F}}(G,p)\cong \ker R_{\mathcal {P}}(G,p)\). The space of trivial infinitesimal flexes of (G, p) has dimension d and so in general we have
with equality if and only if (G, p) is infinitesimally rigid. \(\square \)
If F is a facet of \({\mathcal {P}}\) and \(y_1,y_2,\ldots ,y_{d}\in \mathrm{ext}({\mathcal {P}})\) are extreme points of \({\mathcal {P}}\) which are contained in F, then for each column vector \(y_k\) we compute \([1 \cdots 1]\,A^{-1}\, y_k=1\), where \(A=[y_1\cdots y_d]\in M^{d\times d}({\mathbb {R}})\). Hence,
Moreover, if \(y_1,y_2,\ldots ,y_{d}\) are pairwise orthogonal, then
and so
where \(\Vert \cdot \Vert _2\) is the Euclidean norm on \({\mathbb {R}}^d\).

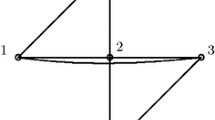
An infinitesimally flexible and an infinitesimally rigid placement of \(K_2\) in \(({\mathbb {R}}^2,\Vert \cdot \Vert _1)\)
Example 9
Let \({\mathcal {P}}\) be a crosspolytope in \({\mathbb {R}}^d\) with 2d many extreme points \(\mathrm{ext}({\mathcal {P}})=\{\pm e_k:k=1,\ldots ,d\}\), where \(e_1,e_2,\ldots ,e_d\) is the usual basis in \({\mathbb {R}}^d\). Then each facet F contains d pairwise orthogonal extreme points \(y_1,y_2,\ldots ,y_d\) each of Euclidean norm 1. By (8), \(\hat{F} = \sum _{j=1}^d y_j\) and the resulting polyhedral norm is the 1-norm
Consider for example the placements of the complete graph \(K_2\) in \(({\mathbb {R}}^2,\Vert \cdot \Vert _1)\) illustrated in Fig. 1. The polytope \({\mathcal {P}}\) is indicated on the left with facets labelled \(F_1\) and \(F_2\). The extreme points of the polar set \({\mathcal {P}}^\triangle \) which correspond to these facets are \(\hat{F}_1=e_1+e_2=(1,1)\) and \(\hat{F}_2=e_1-e_2=(1,-1)\). The first placement is well-positioned with respect to \({\mathcal {P}}\) and the rigidity matrix is

Evidently, this bar-joint framework has a non-trivial infinitesimal flex. The second placement is not well-positioned and the rigidity matrix is

As the rigidity matrix has rank 2, this bar-joint framework is infinitesimally rigid in \(({\mathbb {R}}^2,\Vert \cdot \Vert _1)\), but continuously flexible.
4 Edge-Labellings and Monochrome Subgraphs
In this section, we describe an edge-labelling on G which depends on the placement of the bar-joint framework (G, p) in \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\) relative to the facets of \({\mathcal {P}}\). We provide methods for identifying infinitesimally flexible frameworks and subframeworks which are relatively infinitesimally rigid. We then characterise infinitesimal rigidity for bar-joint frameworks with d framework colours in terms of the monochrome subgraphs induced by this edge-labelling.
4.1 Edge-Labellings
Let (G, p) be a general bar-joint framework in \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\) (i.e. it is not assumed here that (G, p) is finite or well-positioned). Since \({\mathcal {P}}\) is symmetric in \({\mathbb {R}}^d\), if F is a facet of \({\mathcal {P}}\) then \(-F\) is also a facet of \({\mathcal {P}}\). Denote by \(\varPhi ({\mathcal {P}})\) the collection of all pairs \([F]=\{F,-F\}\). For each edge \(vw\in E(G)\), define
We refer to the elements of \(\varPhi (vw)\) as the framework colours of the edge vw. For example, if \(p_v-p_w\) lies in the conical hull of exactly one facet of \({\mathcal {P}}\), then the edge vw has just one framework colour. If \(p_v-p_w\) lies along a ray through an extreme point of \({\mathcal {P}}\), then vw has at least d distinct framework colours. By Lemma 3, [F] is a framework colour for an edge vw if and only if either \(\varphi _F\) or \(-\varphi _F\) is a support functional for \(\tfrac{p_v-p_w}{\Vert p_v-p_w\Vert _{\mathcal {P}}}\).
For each vertex \(v_0\in V(G)\), denote by \(\varPhi (v_0)\) the collection of framework colours of all edges which are incident with \(v_0\):
Proposition 10
If a (finite or infinite) bar-joint framework (G, p) is infinitesimally rigid in \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\), then \(|\varPhi (v)|\ge d\) for each vertex \(v\in V(G)\).
Proof
If \(v_0\in V(G)\) and \(|\varPhi (v_0)|< d\), then there exists non-zero
By Theorem 5, if \(u:V(G)\rightarrow {\mathbb {R}}^d\) is defined by
then u is a non-trivial infinitesimal flex of (G, p). \(\square \)
We now consider the subgraphs of G which are spanned by edges possessing a particular framework colour. For each facet F of \({\mathcal {P}}\), define
and let \(G_F\) be the subgraph of G spanned by \(E_F(G,p)\). We refer to \(G_F\) as a monochrome subgraph of G.
Denote by \(\varPhi (G,p)\) the collection of all framework colours of edges of G:
We refer to the elements of \(\varPhi (G,p)\) as the framework colours of the bar-joint framework (G, p).
Proposition 11
Let (G, p) be a (finite or infinite) bar-joint framework which is infinitesimally rigid in \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\). If C is a collection of framework colours of (G, p) with \(|\varPhi (G,p)\backslash C|<d\), then
contains a spanning tree of G.
Proof
Suppose that \(\bigcup _{[F]\in C}G_F\) does not contain a spanning tree of G. Then there exists a partition \(V(G) = V_1 \cup V_2\) for which there is no edge \(v_1v_2\in E(G)\) with framework colour contained in C satisfying \(v_1\in V_1\) and \(v_2\in V_2\). Since \(|\varPhi (G,p)\backslash C|<d\), there exists non-zero
By Theorem 5, if \(u:V(G)\rightarrow {\mathbb {R}}^d\) is defined by
then u is a non-trivial infinitesimal flex of (G, p). We conclude that \(\bigcup _{[F]\in C}G_F\) contains a spanning tree of G. \(\square \)
It is possible to construct examples which show that the converse to Proposition 11 does not hold in general. In Theorem 13, we show that a converse statement does hold under the additional assumption that \(|\varPhi (G,p)|=d\).
4.2 Edge-Labelled Paths and Relative Infinitesimal Rigidity
Let (G, p) be a finite bar-joint framework in \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\) and, for each edge \(vw\in E(G)\), let \(X_{vw}\) be the vector subspace of \({\mathbb {R}}^d\):
If \(\gamma =\{v_1v_2,v_2v_3,\ldots ,v_{n-1}v_n\}\) is a path in G from a vertex \(v_1\) to a vertex \(v_n\), then we define
For each pair of vertices \(v,w\in V(G)\), denote by \(\varGamma _G(v,w)\) the set of all paths \(\gamma \) in G from v to w.
A subframework of (G, p) is a bar-joint framework (H, p) obtained by restricting p to the vertex set of a subgraph H. We say that (H, p) is relatively infinitesimally rigid in (G, p) if the restriction of every infinitesimal flex of (G, p) to (H, p) is trivial.
Proposition 12
Let (G, p) be a finite bar-joint framework in \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\) and let (H, p) be a subframework of (G, p). If for each pair of vertices \(v,w\in V(H)\)
then (H, p) is relatively infinitesimally rigid in (G, p).
Proof
Let \(u\in {\mathcal {F}}(G,p)\) be an infinitesimal flex of (G, p) and let \(v,w\in V(H)\). Suppose \(\gamma \in \varGamma _G(v,w)\), where \(\gamma =\{v_1v_2,\ldots ,v_{n-1}v_n\}\) is a path in G with \(v=v_1\) and \(w=v_n\). Then by Theorem 5,
Since this holds for all paths in \(\varGamma _G(v,w)\), the hypothesis implies that \(u_v=u_w\). Applying this argument to every pair of vertices in H, we see that the restriction of u to V(H) is constant and hence a trivial infinitesimal flex of (H, p). Thus (H, p) is relatively infinitesimally rigid in (G, p). \(\square \)
4.3 Monochrome Spanning Subgraphs
Applying the results of the previous sections, we can now characterise the infinitesimally rigid bar-joint frameworks in \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\) which use exactly d framework colours.
Theorem 13
Let (G, p) be a (finite or infinite) bar-joint framework in \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\) and suppose that \(|\varPhi (G,p)|=d\). Then the following statements are equivalent:
-
(i)
(G, p) is infinitesimally rigid.
-
(ii)
\(G_F\) contains a spanning tree of G for each \([F]\in \varPhi (G,p)\).
Proof
The implication \(\mathrm{{(i)}}\Rightarrow \mathrm{{(ii)}}\) follows from Proposition 11. To prove \(\mathrm{{(ii)}}\Rightarrow \mathrm{{(i)}}\), let \(u\in {\mathcal {F}}(G,p)\). If \(v,w\in V(G)\), then for each framework colour \([F]\in \varPhi (G,p)\) there exists a path in \(G_F\) from v to w. Hence
and, by Proposition 12, \(u_v=u_w\). Applying this argument to all pairs \(v,w\in V(G)\), we see that u is a trivial infinitesimal flex and so (G, p) is infinitesimally rigid. \(\square \)
A bar-joint framework (G, p) is minimally infinitesimally rigid in \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\) if it is infinitesimally rigid and every subframework obtained by removing a single edge from G is infinitesimally flexible.
Corollary 14
Let (G, p) be a (finite or infinite) bar-joint framework in \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\) and suppose that \(|\varPhi (G,p)|=d\). If \(G_F\) is a spanning tree in G for each \([F]\in \varPhi (G,p)\), then (G, p) is minimally infinitesimally rigid.
Proof
By Theorem 13, (G, p) is infinitesimally rigid. If any edge vw is removed from G, then \(G_F\) is no longer a spanning tree for some \([F]\in \varPhi (G,p)\). By Theorem 13, the subframework \((G\backslash \{vw\},p)\) is not infinitesimally rigid and so we conclude that (G, p) is minimally infinitesimally rigid. \(\square \)
There exist bar-joint frameworks which show that the converse statement to Corollary 14 does not hold in full generality. In the following corollary, the converse is established for bar-joint frameworks that are well-positioned.
Corollary 15
Let (G, p) be a (finite or infinite) well-positioned bar-joint framework in \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\) and suppose that \(|\varPhi (G,p)|=d\). Then the following statements are equivalent:
-
(i)
(G, p) is minimally infinitesimally rigid.
-
(ii)
\(G_F\) is a spanning tree in G for each \([F]\in \varPhi (G,p)\).
Proof
\(\mathrm{{(i)}}\Rightarrow \mathrm{{(ii)}}\). Let \([F]\in \varPhi (G,p)\). If (G, p) is minimally infinitesimally rigid, then by Theorem 13 the monochrome subgraph \(G_F\) contains a spanning tree of G. Suppose vw is an edge of G which is contained in \(G_F\). Since (G, p) is minimally infinitesimally rigid, \((G\backslash \{vw\},p)\) is infinitesimally flexible. Since (G, p) is well-positioned, vw is contained in exactly one monochrome subgraph of G and so \(G_F\) is the only monochrome subgraph which is altered by removing the edge vw from G. By Theorem 13, \(G_F\backslash \{vw\}\) does not contain a spanning tree of G. We conclude that \(G_F\) is a spanning tree of G. The implication \(\mathrm{{(ii)}}\Rightarrow \mathrm{{(i)}}\) is proved in Corollary 14. \(\square \)
5 An Analogue of Laman’s Theorem
In this section, we address the problem of whether there exists a combinatorial description of the class of graphs for which a minimally infinitesimally rigid placement exists in \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\). We restrict our attention to finite bar-joint frameworks and prove that in two dimensions such a characterisation exists (Theorem 23). This result is analogous to Laman’s theorem [14] for bar-joint frameworks in the Euclidean plane and extends [12, Thm. 4.6] which holds in the case where \({\mathcal {P}}\) is a quadrilateral.
5.1 Regular Placements
Let \(\omega (G,{\mathbb {R}}^d,{\mathcal {P}})\) denote the set of all well-positioned placements of a finite simple graph G in \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\). A bar-joint framework (G, p) is regular in \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\) if the function
achieves its maximum value at p.
Lemma 16
Let G be a finite simple graph.
-
(i)
The set of placements of G in \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\) which are both well-positioned and regular is an open set in \(\prod _{v\in V(G)}{\mathbb {R}}^{d}\).
-
(ii)
The set of placements of G in \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\) which are well-positioned and not regular is an open set in \(\prod _{v\in V(G)}{\mathbb {R}}^{d}\).
Proof
Let p be a well-positioned placement of G and let U be an open neighbourhood of p as in the statement of Proposition 6. The matrix-valued function \(x\mapsto R_{\mathcal {P}}(G,x)\) is constant on U and so either (G, x) is regular for all \(x\in U\) or (G, x) is not regular for all \(x\in U\). \(\square \)
A finite simple graph G is (minimally) rigid in \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\) if there exists a well-positioned placement of G which is (minimally) infinitesimally rigid.
Example 17
The complete graph \(K_4\) is minimally rigid in \(({\mathbb {R}}^2,\Vert \cdot \Vert _{\mathcal {P}})\) for every polyhedral norm \(\Vert \cdot \Vert _{\mathcal {P}}\). To see this, let \(F_1,F_2,\ldots ,F_n\) be the facets of \({\mathcal {P}}\) and let \(x_0\in \mathrm{ext}({\mathcal {P}})\) be any extreme point of \({\mathcal {P}}\). Then \(x_0\) is contained in exactly two facets, \(F_1\) and \(F_2\) say. Choose a point \(x_1\) in the relative interior of \(F_1\) and a point \(x_2\) in the relative interior of \(F_2\). Then by formulas (3) and (4),
Since \((x_0\cdot \hat{F}_1) = (x_0\cdot \hat{F}_2)=\Vert x_0\Vert _{\mathcal {P}}=1\), if \(x_1\) and \(x_2\) are chosen to lie in a sufficiently small neighbourhood of \(x_0\) then by continuity we may assume
We may also assume without loss of generality that
Define a placement \(p:V(K_4)\rightarrow {\mathbb {R}}^2\) by setting
where \(0<\varepsilon <1\). The edges \(v_0v_1\), \(v_0v_2\) and \(v_1v_3\) have framework colours
To determine the framework colours for the remaining edges, we will apply the above identities together with formulas (3) and (4). Consider the edge \(v_2v_3\). If \(k\not =1\) and \(\varepsilon \) is sufficiently small, then applying (9)
We conclude that \(F_1\) is the unique facet of \({\mathcal {P}}\) for which \(\Vert p_{v_3}-p_{v_2}\Vert _{\mathcal {P}}= (p_{v_3}-p_{v_2})\cdot \hat{F}_1\) and so \(p_{v_3}-p_{v_2}\in {\text {cone}}(F_1)^\circ \). Thus \(\varPhi (v_2v_3)=[F_1]\). Consider the edge \(v_0v_3\). Applying (10) and (11), for \(k\not =1,2\) we have
By applying (13),
and by (10),
Hence \(F_2\) is the unique facet of \({\mathcal {P}}\) for which \(\Vert p_{v_3}-p_{v_0}\Vert _{\mathcal {P}}= (p_{v_3}-p_{v_0})\cdot \hat{F}_2\). Thus \(p_{v_3}-p_{v_0}\in {\text {cone}}(F_2)^\circ \) and so \(\varPhi (v_0v_3)=[F_2]\). Finally, consider the edge \(v_1v_2\). Applying (13), we have
and this value is positive provided \(\varepsilon \) is sufficiently small. By (9), we have
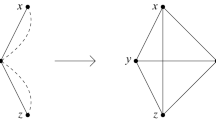
We conclude that \((p_{v_2}-p_{v_1})\cdot (\pm \hat{F}_2)<\Vert p_{v_2}-p_{v_1}\Vert _{\mathcal {P}}\). Hence \(p_{v_2}-p_{v_1}\notin {\text {cone}}(F_2)\). By making a small perturbation, we can assume that \(p_{v_2}-p_{v_1}\) is contained in the conical hull of exactly one facet of \({\mathcal {P}}\) and so \(\varPhi (v_1v_2)=[F_k]\) for some \([F_k]\not =[F_2]\). Thus (G, p) is well-positioned. This framework colouring is illustrated in Fig. 2 with monochrome subgraphs \(G_{F_1}\) and \(G_{F_2}\) indicated in black and grey, respectively, and \(G_{F_k}\) indicated by the dotted line. Suppose \(u\in {\mathcal {F}}(K_4,p)\). To show that u is a trivial infinitesimal flex, we apply the method of Proposition 12. The vertices \(v_0\) and \(v_1\) are joined by monochrome paths in both \(G_{F_1}\) and \(G_{F_2}\) and so \(u_{v_0}=u_{v_1}\). Similarly, \(u_{v_2}=u_{v_3}\). The vertices \(v_1\) and \(v_2\) are joined by monochrome paths in \(G_{F_2}\) and \(G_{F_k}\) and so \(u_{v_1}=u_{v_2}\). Thus u is a constant and hence trivial infinitesimal flex of \((K_4,p)\). We conclude that \((K_4,p)\) and all regular and well-positioned placements of \(K_4\) are infinitesimally rigid.

A framework colouring for an infinitesimally rigid placement of \(K_4\) in \(({\mathbb {R}}^2,\Vert \cdot \Vert _{\mathcal {P}})\)
5.2 Counting Conditions
The Maxwell counting conditions [17] state that a finite minimally infinitesimally rigid bar-joint framework (G, p) in Euclidean space \({\mathbb {R}}^d\) must satisfy \(|E(G)|=d|V(G)|-{d+1\atopwithdelims ()2}\) with inequalities \(|E(H)|\le d|V(H)|-{d+1\atopwithdelims ()2}\) for all subgraphs H containing at least d vertices. The following analogous statement holds for polyhedral norms.
Proposition 18
Let (G, p) be a finite and well-positioned bar-joint framework in \(({\mathbb {R}}^d,\Vert \cdot \Vert _{\mathcal {P}})\). If (G, p) is minimally infinitesimally rigid, then
-
(i)
\(|E(G)|= d|V(G)|-d\) and
-
(ii)
\(|E(H)|\le d|V(H)|-d\) for all subgraphs H of G.
Proof
If (G, p) is minimally infinitesimally rigid, then by Proposition 8 the rigidity matrix \(R_{\mathcal {P}}(G,p)\) is independent and
The rigidity matrix for any subframework of (G, p) is also independent and so
for all subgraphs H. \(\square \)
A graph G is (d, d)-tight if it satisfies the counting conditions in the above proposition. The class of (2, 2)-tight graphs has the property that every member can be constructed from a single vertex by applying a sequence of finitely many allowable graph moves (see [18]). The allowable graph moves are:
-
1.
The Henneberg 1-move (also called vertex addition, or 0-extension).
-
2.
The Henneberg 2-move (also called edge splitting, or 1-extension).
-
3.
The edge-to-\(K_3\) move (also called vertex splitting).
-
4.
The vertex-to-\(K_4\) move.
A Henneberg 1-move \(G\rightarrow G'\) adjoins a vertex \(v_0\) to G together with two edges \(v_0v_1\) and \(v_0v_2\) where \(v_1,v_2\in V(G)\).
Proposition 19
The Henneberg 1-move preserves infinitesimal rigidity for well-positioned bar-joint frameworks in \(({\mathbb {R}}^2,\Vert \cdot \Vert _{\mathcal {P}})\).
Proof
Suppose (G, p) is well-positioned and infinitesimally rigid and let \(G\rightarrow G'\) be a Henneberg 1-move on the vertices \(v_1,v_2\in V(G)\). Choose distinct \([F_1],[F_2]\in \varPhi ({\mathcal {P}})\) and define a placement \(p'\) of \(G'\) by \(p'_{v}=p_{v}\) for all \(v\in V(G)\) and
Then \((G',p')\) is well-positioned and the edges \(v_0v_1\) and \(v_0v_2\) have framework colours \([F_1]\) and \([F_2]\), respectively. If \(u\in {\mathcal {F}}(G',p')\), then the restriction of u to V(G) is an infinitesimal flex of (G, p). This restriction must be trivial and hence constant. In particular, \(u_{v_1}=u_{v_2}\). By Theorem 5, \(\varphi _{F_1}(u_{v_0}-u_{v_1})=0\) and \(\varphi _{F_2}(u_{v_0}-u_{v_1})=\varphi _{F_2}(u_{v_0}-u_{v_2})=0\) and so \(u_{v_0}=u_{v_1}\). We conclude that \((G',p')\) is infinitesimally rigid. \(\square \)
A Henneberg 2-move \(G\rightarrow G'\) removes an edge \(v_1v_2\) from G and adjoins a vertex \(v_0\) together with three edges \(v_0v_1\), \(v_0v_2\) and \(v_0v_3\).
Proposition 20
The Henneberg 2-move preserves infinitesimal rigidity for well-positioned bar-joint frameworks in \(({\mathbb {R}}^2,\Vert \cdot \Vert _{\mathcal {P}})\).
Proof
Suppose (G, p) is well-positioned and infinitesimally rigid and let \(G\rightarrow G'\) be a Henneberg 2-move on the vertices \(v_1,v_2,v_3\in V(G)\) and the edge \(v_1v_2\in E(G)\). Let \([F_1]\) be the unique framework colour for the edge \(v_1v_2\) and choose any \([F_2]\in \varPhi ({\mathcal {P}})\) with \([F_2]\not =[F_1]\). Define a placement \(p'\) of \(G'\) by setting \(p'_{v}=p_{v}\) for all \(v\in V(G)\) and choosing \(p'_{v_0}\) to lie on the intersection of the line through \(p_{v_1}\) and \(p_{v_2}\) and the double cone \(p_{v_3}+({\text {cone}}(F_2)^\circ \cup -{\text {cone}}(F_2)^\circ )\). (If \(p_{v_1},p_{v_2},p_{v_3}\) are collinear, then choose \(p'_{v_0}\) to lie in the intersection of this double cone and a small neighbourhood of \(p_{v_3}\).) Then \((G',p')\) is well-positioned. Both edges \(v_0v_1\) and \(v_0v_2\) have framework colour \([F_1]\) and the edge \(v_0v_3\) has framework colour \([F_2]\). If \(u\in {\mathcal {F}}(G',p')\), then by Theorem 5
Hence the restriction of u to V(G) is an infinitesimal flex of (G, p) and must be trivial. In particular, \(u_{v_1}=u_{v_3}\). Now \(\varphi _{F_1}(u_{v_0}-u_{v_1})=0\) and \(\varphi _{F_2}(u_{v_0}-u_{v_1})=\varphi _{F_2}(u_{v_0}-u_{v_3})=0\) and so \(u_{v_0}=u_{v_1}\). We conclude that u is a constant and hence trivial infinitesimal flex of \((G',p')\). \(\square \)
Let \(v_1v_2\) be an edge of G. An edge-to-\(K_3\) move \(G\rightarrow G'\) (on the edge \(v_1v_2\) and the vertex \(v_1\)) is obtained in two steps: Firstly, adjoin a new vertex \(v_0\) and two new edges \(v_0v_1\) and \(v_0v_2\) to G (creating a copy of \(K_3\) with vertices \(v_0,v_1,v_2\)). Secondly, each edge \(v_1w\) of G which is incident with \(v_1\) is either left unchanged or is removed and replaced with the edge \(v_0w\).
Proposition 21
The edge-to-\(K_3\) move preserves infinitesimal rigidity for finite well-positioned bar-joint frameworks in \(({\mathbb {R}}^2,\Vert \cdot \Vert _{\mathcal {P}})\).
Proof
Suppose (G, p) is well-positioned and infinitesimally rigid and let \(G\rightarrow G'\) be an edge-to-\(K_3\) move on the vertex \(v_1\in V(G)\) and the edge \(v_1v_2\in E(G)\). Let \([F_1]\) be the unique framework colour for \(v_1v_2\) and choose any \([F_2]\in \varPhi ({\mathcal {P}})\) with \([F_2]\not =[F_1]\). Since \(v_1\) has finite valence, there exists an open ball \(B(p_{v_1},r)\) such that if \(p_{v_1}\) is replaced with any point \(x\in B(p_{v_1},r)\), then the induced framework colouring of G is left unchanged. Define a placement \(p'\) of \(G'\) by setting \(p'_{v}=p_{v}\) for all \(v\in V(G)\) and choosing
Then \((G',p')\) is well-positioned. Suppose \(u\in {\mathcal {F}}(G',p')\) is an infinitesimal flex of \((G',p')\). The framework colours for the edges \(v_0v_1\) and \(v_0v_2\) are \([F_2]\) and \([F_1]\), respectively. Thus there exists a path from \(v_0\) to \(v_1\) in the monochrome subgraph \(G'_{F_1}\) given by the edges \(v_1v_2,v_2v_0\), and there exists a path from \(v_0\) to \(v_1\) in the monochrome subgraph \(G'_{F_2}\) given by the edge \(v_0v_1\). By the relative rigidity method of Proposition 12, \(u_{v_0}=u_{v_1}\). If an edge \(v_1w\) in G has framework colour [F] induced by (G, p) and is replaced by \(v_0w\) in \(G'\), then the framework colour is unchanged. Thus applying Theorem 5,
and so the restriction of u to V(G) is an infinitesimal flex of (G, p). This restriction is constant since (G, p) is infinitesimally rigid and so u is a trivial infinitesimal flex of \((G',p')\). \(\square \)
A vertex-to-\(K_4\) move \(G\rightarrow G'\) replaces a vertex \(v_0\in V(G)\) with a copy of the complete graph \(K_4\) by adjoining three new vertices \(v_1,v_2,v_3\) and six edges \(v_0v_1\), \(v_0v_2\), \(v_0v_3\), \(v_1v_2\), \(v_1v_3\), \(v_2v_3\). Each edge \(v_0w\) of G which is incident with \(v_0\) may be left unchanged or replaced by one of \(v_1w\), \(v_2w\) or \(v_3w\).
Proposition 22
The vertex-to-\(K_4\) move preserves infinitesimal rigidity for finite well-positioned bar-joint frameworks in \(({\mathbb {R}}^2,\Vert \cdot \Vert _{\mathcal {P}})\).
Proof
Suppose (G, p) is well-positioned and infinitesimally rigid and let \(G\rightarrow G'\) be a vertex-to-\(K_4\) move on the vertex \(v_0\in V(G)\) which introduces new vertices \(v_1\), \(v_2\) and \(v_3\). Since \(v_0\) has finite valence, there exists an open ball \(B(p_{v_0},r)\) such that if \(p_{v_0}\) is replaced with any point \(x\in B(p_{v_0},r)\), then (G, x) and (G, p) induce the same framework colouring on G. Let \((K_4,\tilde{p})\) be the well-positioned and infinitesimally rigid placement of \(K_4\) constructed in Example 17. Define a well-positioned placement \(p'\) of \(G'\) by setting \(p'_{v}=p_{v}\) for all \(v\in V(G)\) and
where \(\varepsilon >0\) is chosen to be sufficiently small so that \(p'_{v_1}\), \(p'_{v_2}\) and \(p'_{v_3}\) are all contained in \(B(p_{v_0},r)\). Suppose \(u\in {\mathcal {F}}(G',p')\). By the argument in Example 17, the restriction of u to the vertices \(v_0,v_1,v_2,v_3\) is constant. Thus if \(v_0w\) is an edge of G with framework colour [F] which is replaced by \(v_kw\) in \(G'\), then applying Theorem 5,
and so the restriction of u to V(G) is an infinitesimal flex of (G, p). Since (G, p) is infinitesimally rigid, this restriction is constant, and we conclude that u is a trivial infinitesimal flex of \((G',p')\). \(\square \)
We now show that the class of finite graphs which have minimally infinitesimally rigid well-positioned placements in \(({\mathbb {R}}^2,\Vert \cdot \Vert _{\mathcal {P}})\) is precisely the class of (2, 2)-tight graphs. In particular, the existence of such a placement does not depend on the choice of polyhedral norm on \({\mathbb {R}}^2\).
Theorem 23
Let G be a finite simple graph and let \(\Vert \cdot \Vert _{\mathcal {P}}\) be a polyhedral norm on \({\mathbb {R}}^2\). The following statements are equivalent:
-
(i)
G is minimally rigid in \(({\mathbb {R}}^2,\Vert \cdot \Vert _{\mathcal {P}})\).
-
(ii)
G is (2, 2)-tight.
Proof
\(\mathrm{{(i)}}\Rightarrow \mathrm{{(ii)}}\). If G is minimally rigid, then there exists a placement p such that (G, p) is minimally infinitesimally rigid in \(({\mathbb {R}}^2,\Vert \cdot \Vert _{\mathcal {P}})\) and the result follows from Proposition 18.
\(\mathrm{{(ii)}}\Rightarrow \mathrm{{(i)}}\). If G is (2, 2)-tight, then there exists a finite sequence of allowable graph moves, \(K_1\longrightarrow G_2\longrightarrow G_3\longrightarrow \cdots \longrightarrow G\). Every placement of \(K_1\) is certainly infinitesimally rigid. By Propositions 19–22, for each graph in the sequence there exists a well-positioned and infinitesimally rigid placement in \(({\mathbb {R}}^2,\Vert \cdot \Vert _{\mathcal {P}})\). In particular, (G, p) is infinitesimally rigid for some well-positioned placement p. If a single edge is removed from G, then by Proposition 18 the resulting subframework is infinitesimally flexible. Hence (G, p) is minimally infinitesimally rigid in \(({\mathbb {R}}^2,\Vert \cdot \Vert _{\mathcal {P}})\). \(\square \)
References
Alexandrov, A.D.: Konvexe Polyeder. Akademie-Verlag, Berlin (1958)
Asimow, L., Roth, B.: The rigidity of graphs. Trans. Am. Math. Soc. 245, 279–289 (1978)
Asimow, L., Roth, B.: The rigidity of graphs II. J. Math. Anal. Appl. 68, 171–190 (1979)
Bach, F.: Structured sparsity-inducing norms through submodular functions. Adv. Neural Inf. Process. Syst. 23, 118–126 (2010)
Borcea, C.S., Streinu, I.: Periodic frameworks and flexibility. Proc. R. Soc. A 466, 2633–2649 (2010)
Cauchy A.: Sur les polygones et polyèdres. Second Mémoir. J. École Polytechn. 9, 87–99 (1813); Oeuvres. T. 1. Paris 1905, pp. 26–38
Connelly, R.: Generic global rigidity. Discrete Comput. Geom. 33(4), 549–563 (2005)
Gortler, S., Healy, A., Thurston, D.: Characterizing generic global rigidity. Am. J. Math. 132(4), 897–939 (2010)
Graver, J., Servatius, B., Servatius, H.: Combinatorial Rigidity. Graduate Texts in Mathematics, vol. 2. American Mathematical Society, Providence, RI (1993)
Grünbaum, B.: Convex Polytopes. Pure and Applied Mathematics, vol. 16. Interscience Publishers, Wiley, New York (1967)
Jackson, B., Jordan, T.: Connected rigidity matroids and unique realisations of graphs. J. Comb. Theory B 94, 1–29 (2005)
Kitson, D., Power, S.C.: Infinitesimal rigidity for non-Euclidean bar-joint frameworks. Bull. Lond. Math. Soc. 46(4), 685–697 (2014)
Kitson D., Power S.C.: The rigidity of infinite graphs. Preprint 2013. http://arxiv.org/abs/1310.1860
Laman, G.: On graphs and the rigidity of plane skeletal structures. J. Eng. Math. 4, 331–340 (1970)
Lovász, L.: Mathematical Programming: The State of the Art (Bonn, 1982). Submodular Functions and Convexity. Springer, Berlin (1983)
Malestein, J., Theran, L.: Generic combinatorial rigidity of periodic frameworks. Adv. Math. 233, 291–331 (2013)
Maxwell, J.C.: On the calculation of the equilibrium and stiffness of frames. Philos. Mag. 27, 294–299 (1864)
Nixon, A., Owen, J.C.: An inductive construction of \((2, 1)\)-tight graphs. Contrib. Discrete Math. 9(2), 91–94 (2014)
Nixon, A., Owen, J.C., Power, S.C.: Rigidity of frameworks supported on surfaces. SIAM J. Discrete Math. 26, 1733–1757 (2012)
Power, S.C.: Polynomials for crystal frameworks and the rigid unit mode spectrum. Philos. Trans. R. Soc. A 372, 20120030 (2014)
Ross, E.: The rigidity of periodic body-bar frameworks on the three-dimensional fixed torus. Philos. Trans. R. Soc. A 372, 20120112 (2014)
Schulze, B.: Symmetric versions of Laman’s theorem. Discrete Comput. Geom. 44(4), 946–972 (2010)
Ward, J.E., Wendell, R.E.: Using block norms for location modeling. Oper. Res. 33(5), 1074–1090 (1985)
Whiteley, W.: Infinitesimally rigid polyhedra. I. Statics of frameworks. Trans. Am. Math. Soc. 285(2), 431–465 (1984)
Whiteley, W.: The union of matroids and the rigidity of frameworks. SIAM J. Discrete Math. 1(2), 237–255 (1988)
Whiteley, W.: Matroids and Rigid Structures. Encyclopedia of Mathematical Application, vol. 40, pp. 1–53. Cambridge University Press, Cambridge (1992)
Author information
Authors and Affiliations
Corresponding author
Additional information
Editor in Charge: Günter M. Ziegler
Supported by the Engineering and Physical Sciences Research Council [grant number EP/J008648/1].
Rights and permissions
Open Access This article is distributed under the terms of the Creative Commons Attribution 4.0 International License (http://creativecommons.org/licenses/by/4.0/), which permits unrestricted use, distribution, and reproduction in any medium, provided you give appropriate credit to the original author(s) and the source, provide a link to the Creative Commons license, and indicate if changes were made.
About this article

Cite this article
Kitson, D. Finite and Infinitesimal Rigidity with Polyhedral Norms. Discrete Comput Geom 54, 390–411 (2015). https://doi.org/10.1007/s00454-015-9706-x
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00454-015-9706-x