
Abstract
The paper presents the process of homogenization of the composite material properties obtained by method of continuous source functions developed for simulation both elasticity and heat conduction in composite material reinforced by finite-length regularly distributed, parallel, overlapping fibres. The interaction (fibre–fibre, fibre–matrix) of physical micro-fields influences the composite behaviour. Comparing with finite element method (FEM), the interaction can be simulated either by very fine FE mesh or the interaction is smoothed. The presented computational method is a mesh-reducing boundary meshless type method. The increase in computational efficiency is obtained by use of parallel MATLAB in presented computational models. The stiffness/conductivity is incrementally reduced starting with superconductive/rigid material properties of fibres and the fibre–matrix interface boundary conditions are satisfied by the iterative procedure. The computational examples presented in paper show the homogenized properties of finite-length fibre composites; the thermal and elasticity behaviour of the finite-length fibre composites; the similarities and differences in composite behaviour in thermal and elasticity problems; the control volume element for homogenization of composite materials reinforced by finite-length fibres with the large aspect ratio (length/diameter). The behaviour of the finite-length fibre composite will be shown in similar the heat conduction and elasticity problems. Moreover, the paper provides the possibilities and difficulties connected with present numerical models and suggested ways for further developments.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Composite materials are characterized by the complexity of mechanical properties determining their behaviour. A material having two or more distinct constituent materials or phases may be considered the composite material when the volume fraction is greater than 10% and when the physical property of one constituent is much greater (\(\ge 5\) times) than the other [1]. The composite properties are improved comparing with individual constituent properties. The challenge is to determine the properties of the homogenized material resulting from distinct phases properties. If the dimensions of the homogeneous physical field are significantly larger than the dimensions of in-homogeneities, it is necessary to determine the homogenized material properties.
1.1 Attributes of the fibre composites regarding simulation and homogenization
Fibre composites have a characteristic feature namely the possibility of oriented structures controlling their properties. The typical characteristic of fibre-reinforced composites is that the fibre diameter dimension is mostly 1–100 \(~\upmu \hbox {m}\). In case of finite-length/discontinuous/short fibre/nano-fibre, the diameter may be smaller than \(1~\upmu \hbox {m}\) (the nano-scale). However, in the longitudinal direction, the fibre length is several orders larger.
The finite-length fibre composites have specific characteristics that result from the topology of their microstructure which greatly increases the difficulty of developing the numerical models and efficient computational methods. The computational method suitable for composite materials must describe physical behaviour (mechanical, thermal, magnetic, etc.) of complex material microstructure. In particular, composites reinforced with finite-length micro/nano-fibres need special numerical solutions. In computational micro-mechanics, there are several numerical methods for simulations. Individual methods try to overcome problems in modelling and homogenization by different techniques and approaches (more in [2, 3]). In micro-scale, the composites are characterized by large gradients of physical fields in the fibres, as well as in the matrix caused by very different electro-magneto-thermo-mechanical properties of both the fibres and matrix materials. Moreover, the fibre composites of large fibre AR (i.e. dimensions in the fibre cross-sectional direction are micro/nano-metres but those along the fibres are several orders larger) are challenging for computational simulations. In case of any irregularity (curved fibres, topology) and/or randomness, the cell (i.e. representative volume element—RVE) can involve thousands fibres/tubes in order to determine reliable homogenized composite properties. This can lead to billions of equations to be solved by classical numerical methods due to fine mesh. The factors influencing the finite-length fibre composite material properties are not only individual volume fractions but also the fibre orientation and their mutual overlap (shift). Thus, the interaction of the individual fibres is important to take into account. The experiences with FEM shows that the mechanical and thermal fields are smoothed out by finite elements and thus the strong interaction effect decreases. The closest fibres interact with each other much more than with the far-away fibres. As a fibre composite containing millions to billions of finite-length fibres, their interaction affects the macro-mechanical properties of such materials.
Another problem for the numerical simulation is modelling of the fibre–matrix interface. It can be assumed either perfect (ideal cohesion) or imperfect due to interfacial conditions (the initial strength is exceeded) when the response of the composite material will not be linearly dependent on the load. The models simulating the reinforced composites are presented in [4, 5].
The fibre-reinforced composites can be simulated by 2D models in the case of continuous parallel fibres. The fields in finite-length fibre direction are also 2D axis-symmetric if materials of both fibre and matrix are homogeneous and one only fibre is inside the matrix. However, the fields change in each direction, even if the finite-length fibres are regularly distributed and cannot be approximated by 2D models as it was published in [6]. Such approximation is totally incorrect and does not simulate the composite reinforced by fibres. All physical fields in the finite-length-fibre composites are changing in all directions in the matrix and along fibres and have large gradients there. The three dimensional (3D) models have to be used for computational simulation of the material behaviour.
1.2 Developed computational methods
Several authors developed continuum models for simulation of composites reinforced with micro/nano-fibres/particles using conventional numerical methods [7, 8]. The boundary-element type methods (e.g. Fast Multipole Method (FMM) [9], Fast Multipole Boundary Integral Equation Method (FMBIEM) [10, 11], Boundary Contour Method (BCM) [12] and Adaptive Cross Approximation Boundary Element Method (ACA BEM) [13]) are an alternative of FEM. The boundary-element formulations simulate the decaying effects well but also require a large number of equations to simulate large gradients at interdomain boundaries. Another group of numerical methods suitable for finite-length fibre/particles composites is the group of collocation methods (e.g. Boundary Point Collocation Method (BPCM) [14], Method of Fundamental Solutions (MFS) [15], Boundary Point Method (BPM) [16]) that includes a wide range of numerical methods using global instead of local basis functions for interpolation. Instead of the elements, the points in volume/surface/curve are required for computation which is suitable also for more complex geometry. Such methods are called meshless or mesh-free methods and good accuracy is their typical feature. The accuracy obtained by collocation methods (e.g. \(10^{-16})\) would require in the case of FEM very fine mesh with large computing power. A set of source functions (fundamental solutions) in points outside the domain satisfies the boundary conditions. The source functions serve as the trial functions. However, in case of complex domain shape, the large numbers of both collocation points and source functions are needed. The functions in MFS can be identified as Trefftz functions [17] which interpolate the whole domain of solution and thus MFS can be also involved among Trefftz-type methods. Hybrid-Trefftz methods [18, 19] use a set of trial functions that enables to use so-called macro-elements (large “elements”) having larger dimensions and more complex shapes than the classical finite elements. The continuity between macro-elements (in the weak or the strong sense) is fulfilled by independent functions.
The method of continuous source functions (MCSF) used in our simulations was described in detail in [20] and [21]. Recent improvements are briefly given in the next part of this paper.
2 Method of continuous source functions
MCSF was developed especially for finite-length fibre composites that are solved as a 3D problem. This boundary meshless method uses source functions distributed within the fibre along its axis (1D distribution) to simulate the interaction of finite-length-fibres with a matrix. Continuous source functions are 1D continuous forces, the fundamental (Kelvin) solution well known from the BEM, and its derivatives—dipoles and couples (for linear elasticity problems) situated outside the 3D domain (i.e. outside the matrix). Source functions for thermal problems are heat source and its derivatives (heat dipoles).
The unknown intensities of source functions are computed to satisfy the continuity of displacements/temperatures and strains/heat flow along the fibre–matrix interface in collocation points located on the interface.
As the fibres are mostly thin, the fulfilment of the continuity on the fibre–matrix interface would require a lot of collocation points to satisfy the continuity of fields between fibre and matrix in the interface. The continuous distribution of the source functions reduces the problem considerably.
The dipoles are a very effective tool for modelling composites reinforced with spherical or ellipsoidal particles [22, 23]. If the distribution density of the particles is small then the one particle is simulated by the only triple dipole (dipole in three directions). The efficiency of such model is higher than that of FMBIEM. Dipole is situated inside particle (outside domain of solution) and resulting a zero force and moment on the particle boundary and thus the overall equilibrium is not distorted by local errors as it would be in case of MFS. In the MCSF dipoles serve for completion of interdomain boundary conditions. They are directed perpendicularly to the fibre axis and 1D continuous.
The ends of fibres have a hemispheric form in the models. The recent models concern the source functions inserted into the centres of a hemisphere which considerably improves the numerical stability of the continuous source functions.
This paper presents models for simulation both elasticity and heat conduction in composite material reinforced by finite-length regularly distributed and overlapping fibres and homogenization of material properties.
Computational examples serve to show following:
-
the homogenized properties of finite-length-fibre composites;
-
the thermal and elasticity behaviour of finite-length-fibre composites;
-
the similarities and differences in composite behaviour in thermal and elasticity problems;
-
the way of choosing control volume for homogenization of composite materials reinforced by finite-length fibres with large AR;
-
and the possibilities and difficulties connected with present numerical models and suggested ways for further developments.
The computational models are especially appropriate for parallel algorithms and present models are in parallel MATLAB and presented examples contain up to 63 interacting fibres.
3 Model description and homogenization
The source function of MCSF belong to Trefftz functions, they are also called Trefftz radial basis function (TRBF) in the literature. The Trefftz function is RBF fulfilling the governing equations inside domain (matrix) except the source point itself in which they act. RBFs can be used as interpolating functions of various fields (displacement, stress, strains, temperature, and heat flow, etc. fields in the elastic body, i.e. the body with linear material properties) mainly in the boundary-type methods. The source points are situated outside the domain of solution (i.e. inside fibres in our problems) and the TRBF are:
-
For structural analysis Kelvin fundamental solution (1) (unit force acting in the infinite continuum), its derivations (force dipole and force couple acting in point, Fig. 1) in corresponding direction,
-
For thermal analysis Fundamental solution (4) (unit heat source) and heat dipole.

Unit force, force dipole, force couple
To determine the other fields (magnetic, electric) the TRBF are corresponding fundamental solutions and their derivatives.
Force dipole is two collinear (lying in one line) forces acting in opposite direction in one point. Mathematically, the dipole is a derivation of Kelvin solution in the direction of the applied force and the couple is the derivative of Kelvin solution in the direction perpendicular to the applied force.
The heat dipole is heat source and heat sink applied in two points infinitely closing to each other in corresponding direction. Mathematically, it is a derivation of the heat source in this direction.
Displacement field in elastic continuum caused by a unit force acting in direction of the axis is given by Kelvin solution:
where indices i in \(U_{pi}^\mathrm{F} \) denotes the \( x_{i}\) coordinate of displacement and p the \(x_{p}\), direction of acting unit force F, respectively; G and \(\nu \) are shear modulus and Poisson’s ratio of material of the matrix (consideration of isotropic material), r is the distance between the source point s, where the fictive unit force is acting and the field point (collocation point) t, where the displacement is introduced, i.e.
The summation convection over repeated indices acts and
is the directional derivative of the radius vector r. Index I after the comma represents the partial derivative in the corresponding direction.
Detail formulas for the fields derived from the source function are given in [21, 24, 25].
Similarly, temperature field induced by a unit heat source acting in an arbitrary point of the infinite domain is the fundamental solution for heat problems and it is given by:
where r is the distance of the field point t and source point s, where the heat source is acting at. More details on the derived fields (dipoles) can be found in [20, 26, 27].
The continuous distribution of source functions is approximated using 1D the non-uniform rational B-splines (NURBS), which are most suitable to simulate the functions having large gradients at the ends of fibres. The quadratic B-splines have been used in the present models.
The model considers linear elastic isotropic and homogenous material (matrix) reinforced with uniformly distributed finite-length straight fibres from linear elastic isotropic and homogenous material. Moreover, model assumes that the fibre cross section is much smaller than its length and stiffness of fibres (axial) is much greater than the stiffness of the matrix. Likewise, Young’s modulus of elasticity/thermal conductivity of the fibres is much greater than Young’s modulus of elasticity/thermal conductivity of the matrix. The perfect cohesion between the matrix and the fibres is assumed.
We are interested above all of the reinforcing effect in composite materials reinforced by fibres in the fibre direction. In our models, it is assumed that the fibres are parallel and regularly distributed in the matrix. The purpose of the model is to define the mechanical and thermal reinforcing of matrix by fibres and homogenized material properties. As both matrix and fibre materials have linear material properties, the problems are defined as dimensionless. Heat flow/strain is assumed in the fibre direction and all fields are split into the state of the homogeneous matrix without fibres under these conditions and the state disturbing by fibres (defined as a local problem).
The problem is iteratively starting with assumption of superconductive/rigid fibres as described below.
As the temperature and displacement are apriori not known on the interface between fibre and matrix in the composite, the boundary conditions (BC) for the local problem are specified as follows:
-
temperature difference between corresponding collocation point and the centre of the fibre (it is opposite to the temperature difference in the homogeneous material) by all heat sources and dipoles perpendicular to the fibre axis and,
-
temperature difference between pairs of points on opposite sides of the fibre cross section (assumed to be equal to zero),
for heat transfer (Fig. 2).

Splitting the solution for thermal analysis
In the elasticity (deformation of composite), the main form of deformation fibres is axial strain as a basis for their reinforcing effect. In particular, if the fibres are long (large AR), the bending and torsion forces are much smaller. The local effect is well approximated by following boundary conditions on fibre interface:
-
A.
displacement difference in the fibre axis direction between corresponding collocation point and the centre of the fibre by force sources, dipoles and couples (it is opposite to the displacement difference in the homogeneous material), which represents the axial strain of the local part of deformation in the fibre,
-
B.
axial displacement difference in cross-sectional direction on pairs of points on opposite sides of the fibre cross section (assumed to be equal to zero), which corresponds to assumption of equal axial displacements in the whole cross section and,
-
C.
axial strain difference between pairs of points on opposite sides of the fibre cross section (assumed to be equal to zero).
Figure 2 presents splitting the problem for the first iteration step in thermal analysis into two parts:
-
Homogeneous (matrix without fibres) part of solution. The temperature in this part is linear along fibre (same material as the matrix and straight fibre) and,
-
Non-homogeneous (local-particular) part of solution. The temperature along fibre is linear with opposite gradient to the homogeneous solution prescribed along the fibre boundary.
The resulting solution of the both, for the homogeneous material and local solution gives the constant temperature in the fibre (superconductive fibre material). This distribution of temperature corresponds to the first boundary condition (A) above. The second boundary condition (B) corresponds to the assumption of constant temperature in the fibre cross section.
The boundary conditions in the elasticity are very similar. Instead of temperature, we have displacements for BC (A). The BC (B) represents an assumption of same axial displacements at the whole cross section in the cross-sectional direction and the BC (C) corresponds to the assumption that the bending strain is negligible to the axial strain in fibres (large AR). We note that resulting system of equation is solved in the least squares sense because we have much more equations as unknowns and thus the condition is satisfied in this sense.
A patch of finite number of fibres in the matrix is considered in the models and interaction of all fibre with each other fibre and with the matrix is taken into account.
Temperature/displacement in the centres of fibres are not known for the local problem (they are given to be zero in formulation of interdomain BC) and they have to be computed from the energy balance/equilibrium conditions for each fibre. For this purpose, we have N additional right-hand sides (r.h.s.) for the patch with N fibres to the r.h.s. prescribing temperature/displacement and the other conditions as specified above. They prescribe temperature/displacement equal to one in corresponding fibre and zero in other fibres. The conservation conditions for each fibre in interaction enable to obtain the temperatures in the centres of fibres or displacements (rigid body displacements, RBD).
Note that domain of solution is matrix and fibres are considered to be outer parts in the formulation. In the first iteration step, the fibres are considered to be super-conductors/rigid. Solving the problem, the temperatures in the centre of fibres or RBD are obtained.
The computation repeats by the iterative method. It determines temperature distribution along each fibre from heat flow and fibre heat conductivity that is not infinite but finite and the heat flow of fibre is much greater as in matrix (similarly the fibre displacement for mechanical load). The iterative step repeats until the interdomain continuity conditions change less than the prescribed values.
The above approximation is useful in case the composite material consists of fibres which are not infinitely/very long and Young’s modulus, respectively, thermal conductivity of the fibres, is much larger than that of matrix. These models allow significant simplification of mathematical models of linear elasticity and heat conduction for composite materials reinforced with finite-length fibres. Figure 3 shows a fibre with distributed (1D distribution of source functions along the fibre axis) and collocation points on the fibre boundary.

Scheme of source functions and collocation point distribution
Following rules for the location of collocation points and numerical integration are suggested in the models: collocation points must be denser at the ends of the fibres because of the high gradients of physical fields at the ends of the fibres as they affect the physical fields in adjacent fibres.
The integration path is divided into integration sub-elements. In our models, the smallest integration sub-element has to be as long as the diameter D of the fibre, or smaller.
The length of the nth integration sub-element is determined so that the same number of Gauss integration points in each sub-element will get about the same numerical error in the integration for all sub-elements in the model.
The length of the nth integration sub-element is determined by following rule:
where D is the diameter of the fibre, k is coefficient (\(k=2\)) and n is the sequence of corresponding integration sub-element from the closest sub-element containing collocation point as shown in Fig. 4. Each 1D element defined by preceding NURBS nodal points involves some number of integration sub-elements according to (5).

Distribution of 1D elements (filled diamond), integration sub-elements (filled square), Gauss integration points (times) and collocation points (filled circle)
The number of collocation points on the fibre–matrix interface is related to a length of integration sub-element. If its length is less than D then one collocation point is used and if its length is larger than D (or equal to D) then two or more collocation points are employed. Each integration sub-element has five Gaussian integration points which are also nodal points for numerical integration.
Shape functions for the definition of source functions and for numerical integration are the non-uniform rational B-splines (NURBS), especially the quadratic B-splines (order of spline \(k=3\)).
Unknown distribution of source functions is given by the shape functions and their intensities in control points. The intensities of shape functions calculated from the system of equations:
where A is a matrix of equations system in which line corresponds to a collocation points and column corresponds to the intensity of source function defined by corresponding shape function, c is matrix of unknown intensities of source functions.
Matrices \(\mathbf{u}_{\mathbf{3}{{\varvec{P}}}}\) and \(\mathbf{t}_{\mathbf{3}{{\varvec{P}}}}\) are prescribed displacement and temperatures vectors in the collocation points for the local part of the solution. The number of the r.h.s. in (6) for two kinds of models is equal to (a) number of fibres plus one, or (b) number of fibre layers in fibres axis direction plus one. In each case the r.h.s. prescribe the displacement/temperature in the centres of fibres equal to one in corresponding fibre/fibres of the layer and equal to zero in all other fibres and the last r.h.s. corresponds to the prescribed distribution of displacement/temperature related to its value in the centre of the fibre.
Following model is used for homogenization in heat transfer problems:
where \(k_{iN}\) is constant material heat conductivity for each material phase N (matrix, fibre), without summation convection over the index i denoting corresponding axis direction. For homogeneous isotropic material \(k_i =k\) and is constant in the whole matrix. \(k_{ih}\) is conductivity of the homogenized material in \(x_{i}\) direction. Integrals are computed in Gauss integration points. In both materially and physically homogeneous field, the temperature gradient \(\frac{\partial T}{\partial x_i }\) is constant. In composite material, the individual phases caused that \(\frac{\partial T}{\partial x_i }\) is not constant.
Equation (7) says that the heat flow in the composite material in \(x_{i}\) direction is equivalent to the heat flow in the homogenized material in the same direction and its conductivity is \(k_{ih}\). The control volume CVE is used so that it will be able to specify some volume of the material, i.e. the interaction of the in-homogeneities of both, those inside the CVE and also in the surrounding composite material. The CVE should present the material topology in the mean, i.e. density of fibres and directional topology.
If we want to obtain the homogenized thermal conductivity of material reinforced by parallel fibres regularly distributed in the matrix, we will suppose the material in the thermal field with constant temperature gradient \(\frac{\partial T}{\partial x_i } = 1\) in fibre’s direction and the problem is split into the fields of that in the homogeneous matrix material and the local field. The boundary conditions on the fibre boundaries for the local field are defined as negative to those in the first field.
Equation (7) is realized as:
where \(k_i^C\) is thermal conductivity of composite, \(k^{\mathrm{f}}\) and \(k^{\mathrm{m}}\) are thermal conductivities of fibre and matrix, \(k^{\mathrm{fm}}\) is thermal conductivity defined as: \(k^{\mathrm{fm}}=k^{\mathrm{f}}-k^{\mathrm{m}}\), \(\frac{\partial T^{L}}{\partial x_i }\) is local temperature gradient, \(V^{\mathrm{CV}}\) and \(V^{\mathrm{f}}\) are volumes of CVE and fibre, respectively.
The computational model consists not only from the CVE but also from the fibres in the region around so that as many interacting fibres are included into the model as necessary for obtaining good accuracy of the homogenization.
The models shown in this paper with regular distribution of fibres enable to demonstrate how the number of fibres outside the CVE influences the results.
Homogenization in the elasticity (Eq. 9) is more complicated because of constitutive relations between stress and strain components [30,31,32]; however, taken into account that the stiffness of composite reinforced by parallel fibres is much higher than in directions perpendicular to fibres, it is possible to use the model described by Eqs. (7) and (8) for thermal properties of such composite for stiffening in fibre direction. In our models for the composite material with regularly distributed fibres, the composite is transversely isotropic medium. In corresponding relations for computation of stiffening in fibres direction by homogenization, it is necessary to take displacement \(U_{3}\) in fibres direction \(x_{3}\) instead of temperature T and modulus of stiffness matrix \(C_{33}^C\) [32] relating stress \(\sigma _{33}\) to strain \(\varepsilon _{33}\) instead of composite conductivity \(k_{i}\), modulus of homogeneous matrix material \(C_{33}^m = E (1 -\nu ) / (1 -\nu - 2 \nu ^{2})\) instead of matrix conductivity, Young modulus of fibre \(E^{f}\) instead of conductivity of fibre and corresponding strain (gradient of displacement component in fibre direction) instead of temperature gradient in fibre direction.
Note, that Eqs. (7) and (8) are valid for each direction in heat transfer problems, but corresponding relations (Eq. 9) are true only for the fibre direction (\(i = 3\)), which is the aim of interest for the reinforcing effect of fibres in the elasticity. The approach above also simplifies the computational model.
4 Numerical results and discussion
Two different kinds of problems are shown in examples below heat flow and elasticity. The basic source functions, as shown in previous parts of the paper, are the heat source which is scalar and the force which is vector. The examples document similarities in behaviour the fields in the composite material.
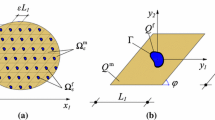
As the materials of fibres and matrix have linear properties, thermal conductivity and modulus of elasticity are chosen equal to one and material properties of fibres are related to them. For the sake of comparison of both kinds of fields, the models are identical. Length of fibres \(L = 100\) and radius of fibres \(R = 1\) so, the AR is 50:1. Fibres are regularly distributed with an overlap and two kinds of densities are chosen according to Fig. 5, upper. Because of regular distribution of fibres the CVE contains only a half of fibre (Fig. 5, lower), however, in fibre-reinforced composites the interaction of fibres is strong and so, models with a patch containing a different number of fibres are shown in order to present the influence on the results of homogenization.
For homogeneous material, the gradient of temperature and strain in fibres direction is supposed to equal to one and the corresponding load is simulated for the composite material, too. Because of regular distribution of fibres, the CVE contains only a half of fibre, however, in the fibre-reinforced composites the interaction of fibres is strong and so, models with a patch containing a different number of fibres are shown in order to present the influence on the results of homogenization.

Fibre arrangement (upper) and CVE for homogenization
Computations start with superconducting/rigid fibres. The convergent solution can be obtained until some value of “weaker” fibres by the iterative procedure. For smaller difference of material properties of fibres and matrix, the incremental-iterative procedure has to be used with material properties of proceeding convergent solution for the next step followed with iterative process. In presented examples, 10 iterations and 8–10 increments were used to obtain the solution with smallest conductivity/stiffness of fibres.
The results presented in figures shown below were obtained for models containing 63 or 13 fibres with lower (2.24%, i.e. distance in x, y, z direction, respectively, \(\hbox {d}x= \hbox {d}y = 4\), \(\hbox {d} z= 55\)) and higher (17.85%, i.e. \(\hbox {d}x = \hbox {d}y = 10\), \(\hbox {d} z= 70\)) volume density of fibres. The figures show only local fields along fibres, i.e. the temperatures and temperature gradients in heat transfer and displacements, strains and stresses in the elasticity problems, respectively. The largest values of conductivity/stiffness of fibres which was obtained in present examples from super-conductive/rigid values were 800 for heat transfer and 300 for elasticity. The last convergent magnitudes obtained by incremental-iterative procedure were 339 for heat transfer and 72 for elasticity, respectively.
One can find differences and similarities in the fields along fibres in both heat transfer and elasticity. As the models contain the finite number of the interacting fibres instead of infinite number regularly distributed and the two strategies for interaction are considered, namely supposing different source functions in each fibre or equal distribution of source functions in the same level of fibres in the fibre direction (which is computationally more effective), the results document both cases. Namely, the elasticity models were obtained by the first and heat conduction by the second strategy.
The higher and lower stiffness/conductivity are presented in figures. The higher stress in Fig. 6 (red/grey) corresponds to higher stiffness of fibres and lower stress to the lower stiffness. The opposite is true for strain and heat flow in Figs. 7 and 8. Note that the lower local heat flow/strain, the higher the “reinforcing” effect of fibres. Heat flow in Fig. 8 is shown in three levels (there are 5 levels in the model with 64 fibres, but because of symmetry three of them are different).

Local stress along fibres

Local strain along fibres

Local heat flow along fibres
Local displacements along fibres are shown in Fig. 9 for corresponding stiffness of fibres and local temperature along fibres has similar behaviour. One can see that there are not strong changes in these functions, which are input to the next iteration step; however, they together with temperatures in centres/rigid body displacements of fibres are decisive for convergence in the iteration process. RBD in chosen fibres versus modulus of elasticity of fibres is shown in Fig. 10. The temperature in centres of fibres changes similarly.

Local displacement along fibres

Local temperature in fibres centre
The “reinforcing” effect (conductivity/stiffness in fibre direction for same material properties of fibres) is lower in heat transfer than in the elasticity. Different basic fields (scalar temperature in heat versus displacement vector in the elasticity and corresponding source functions) cause the lack of convergence by higher values of conductivity than stiffness in the elasticity, i.e. present models allow simulate the composite material elasticity in larger proportions than for heat transfer. Note that the fields induced by heat source have the same value in all points in the same distance from the source point as for the fields originated by force source are directionally dependent.

Stiffness of composite in fibre direction versus modulus of elasticity of fibres for higher density of fibres

Stiffness of composite in fibre direction versus modulus of elasticity of fibres for lower density of fibres
Figures 11, 12, 13 and, 14 contain graphs of the conductivity/stiffness of composite in the fibre direction versus fibre conductivity/stiffness for different density of fibres and also the rate of these values to corresponding values for infinite-length fibres with same volume density as the finite-length fibres.
Very interesting results follow from Figs. 15, 16 and 17. In the elasticity (Fig. 15), the stiffness of the infinite-length fibre composites for both lower and smaller densities differ from the finite-length fibres by less than 7 %. So, it means the computationally cheap and simple models can be used for the approximate guess of the stiffness of composites reinforced by finite-length fibres with large AR. Of course, all displacement, strain and stress fields are very different in both cases because of large gradients in the vicinity of fibre ends.
The situation is quite different in heat conduction problems (see Figs. 16, 17). The conductivity of infinite-length fibres is larger than that of finite-length fibres and the difference increases with decreasing of the rate of both fibre and matrix conductivities and with decreasing density of fibres.

Stiffness of fibre composite versus infinite to finite-length fibres composite for two different densities of fibres

Composite conductivity versus fibre conductivity for higher density of fibres

Composite conductivity versus fibre conductivity for lower density of fibres

Composite conductivity versus infinite to finite-length fibre conductivity for higher densities of fibres

Composite conductivity versus infinite to finite-length fibre conductivity fibre conductivity for lower density of fibres
These observations also gave us the idea to improve the models and avoid the incremental procedure starting with very high stiffness/conductivity of fibres and instead choose constant gradient of displacement/conductivity along fibres corresponding to that of the infinite-length fibre for same density of fibres.
5 Conclusions
The material constants in fibre direction by present homogenization models show very small differences obtained by models with the different number of fibres in the patch of fibres in infinite matrix domain for the approximation of the infinite number of fibres. We can conclude that the interaction of closest fibres is most important for the homogenization. It is important also for homogenization of materials with irregular distribution of fibres. However, the control volume has to be enclosed by at least one level of closest fibres.
It is very interesting the different influence of fibre parameters like the density of fibres, relationship of fibre and matrix density/conductivity to the resulting composite stiffness/conductivity comparing to the case with infinite-length fibres. As mentioned above and also in our previous publications, both elasticity and heat conduction differ from each other and the basic fields are described in the heat conductivity by the heat source, which is scalar and thus the field around the source is directionally independent as for in the elasticity it is described by a force, which is a vector and the fields in the source vicinity is directionally dependent. This also explains why the difference between stiffening effects of finite-length and infinite-length fibres is much smaller in the elasticity than in the heat conduction problems.
The present models enable to study the influence of parameters of fibres, topology and material properties on the reinforcing effect of matrix materials reinforced with finite-length fibres.
As noticed above, the present models converge for higher differences between fibre and matrix material properties. The different model of distributed source functions (probably not the NURBS models) is necessary to develop for smaller differences of both materials.
References
Agarwal, B.D., Broutman, L.J., Chandrashekhara, K.: Analysis and Performance of Fibre Composites. Wiley, Hoboken (2006)
Schmauder, S., Weber, U.: Modelling of functionally graded materials by numerical homogenization. Arch. Appl. Mech. 71(2), 182–192 (2001)
Kamiński, M.: Material sensitivity analysis in homogenization of linear elastic composites. Arch. Appl. Mech. 71(10), 679–694 (2001)
Spring, D.W., Paulino, G.H.: Computational homogenization of the debonding of particle reinforced composites: the role of interphases in interfaces. Comput. Mater. Sci. 109, 209–224 (2015)
Hosseini Kordkheili, S., Toozandehjani, H.: Effective mechanical properties of unidirectional composites in the presence of imperfect interface. Arch. Appl. Mech. 84(6), 807–819 (2014)
Yang, Q.S., Qin, Q.H.: Fibre interactions and effective elasto-plastic properties of short-fibre composites. Compos. Struct. 54(4), 523–528 (2001)
Ghosh, S., Lee, K., Raghavan, P.: A multi-level computational model for multi-scale damage analysis in composite and porous materials. Int. J. Solids Struct. 38(14), 2335–2385 (2001)
Kompiš, V., Murčinková, Z., Žmindák, M.: Toughening mechanisms for the fibre of middle-large aspect-ratio reinforced composites. In: Qin Q.H. and Ye, J. (eds.) Toughening Mechanisms in Composite Materials, Elsevier, Woodhead Publishing, Cambridge, pp. 137–159 (2015)
Greengard, L., Rokhlin, V.: A fast algorithm for particle simulations. J. Comput. Phys. 73(2), 325–348 (1987)
Liu, Y.J., Nishimura, N., Otani, Y., Takahashi, T., Chen, X.L., Munakata, H.: A fast boundary element method for the analysis of fibre-reinforced composites based on a rigid-inclusion model. J. Appl. Mech. 72(1), 115–128 (2005)
Nishimura, N., Yoshida, K.I., Kobayashi, S.: A fast multipole boundary integral equation method for crack problems in 3D. Eng Anal Bound Elem 23(1), 97–105 (1999)
Mukherjee, S.: The boundary contour method. In: Kompiš, V. (ed.) Selected Topics in Boundary Integral Formulations for Solids and Fluids, pp. 117–150. Springer, Wien (2002)
Rjasanow, S., Steinbach, O.: The Fast Solution of Boundary Integral Equations. Springer, Berlin (2007)
Wang, H., Qin, Q.H.: A meshless method for generalized linear or nonlinear Poisson-type problems. Eng Anal Bound Elem 30(6), 515–521 (2006)
Golberg, M.A., Chen, C.S.: The method of fundamental solutions for potential, Helmholtz and diffusion problems. In: Boundary Integral Methods-Numerical and Mathematical Aspects, pp. 103–176 (1998)
Ma, H., Zhou, J., Qin, Q.H.: Boundary point method for linear elasticity using constant and quadratic moving elements. Adv. Eng. Softw. 41(3), 480–488 (2010)
Kompiš, V., Štiavnický, M., Žmindák, M., Murčinková, Z.: Trefftz radial basis functions (TRBF). Comput. Assist. Mech. Eng. Sci. 15(3/4), 239–249 (2008)
Jirousek, J., Zieliński, A.P.: Survey of Trefftz-type element formulations. Comput. Struct. 63(2), 225–242 (1997)
Kompiš, V., Štiavnický, M.: Trefftz functions in FEM, BEM and meshless methods. Comput. Assist. Mech. Eng. Sci. 13(3), 417–426 (2006)
Kompiš, V., Qin, Q.H., Fu, Z.J., Chen, C.S., Droppa, P., Kelemen, M., Chen, W.: Parallel computational models for composites reinforced by CNT-fibres. Eng. Anal. Bound. Elem. 36(1), 47–52 (2012)
Kompiš, V., Kompiš, M., Kaukič, M.: Method of continuous dipoles for modeling of materials reinforced by short micro-fibres. Eng. Anal. Bound. Elem. 31(5), 416–424 (2007)
Štiavnický, M., Kompiš, V., Kaukič, M.: Global Dipole model for composite reinforced by micro/nano-particles. In: International Conference on Computational Modeling and Experiments of the Composites Materials with Micro and Nano-Structure, Liptovský Mikuláš, Slovakia, 28–31 May 2007 (2007)
Zhou, K., Hoh, H.J., Wang, X., Keer, L.M., Pang, J.H., Song, B., Wang, Q.J.: A review of recent works on inclusions. Mech. Mater. 60, 144–158 (2013)
Kompiš, V., Štiavnický, M., Kompiš, M., Murčinková, Z., Qin, Q. H.: Method of continuous source functions for modelling of matrix reinforced by finite fibres. In: Kompiš V. (ed.) Oñte, E. (series ed.) Composites with Micro-and Nano-Structure, Springer Netherlands, pp. 27–45 (2008)
Kompiš, V., Murčinková, Z., Ferencey, V.: Computational simulation of composite materials reinforced by fibres with large aspect ratio. Strojnícky časopis 63(3), 139–153 (2012)
Kompiš, V., Zuzana Murčinková, Z.: Thermal properties of short fibre composites modeled by meshless method. Advances in Materials Science and Engineering 2014, 1–8 (2014)
Kompiš, V., Murčinková, Z., Očkay, M.: Temperature fields in short fibre composites. In: Murín, J., Kompiš, V., Kutiš, V. (eds) Computational Modeling and Advanced Simulations: Computational Methods in Applied Science, pp. 99–116. Springer, Berlin (2011)
Qin, Q.H.: Introduction to the composite and its toughening mechanisms. In: Qin, Q.H., Ye, J. (eds.) Toughening Mechanisms in Composite Materials, pp. 1–32. Woodhead publishing Elsevier, Amsterdam (2015)
Kanit, T., Forest, S., Galliet, I., Mounoury, V., Jeulin, D.: Determination of the size of the representative volume element for random composites: statistical and numerical approach. Int. J. Solids Struct. 40(13), 3647–3679 (2003)
Xia, Z., Zhang, Y., Ellyin, F.: A unified periodical boundary conditions for representative volume elements of composites and applications. Int. J. Solids Struct. 40(8), 1907–1921 (2003)
Materials and Processes (Chapter 2) (2002) The Effects of Variability on Composite Properties, Composite Material Handbook, Vol. 3. Polymer Matrix Composites Materials Usage, Design and Analysis. Department of Defense USA, MIL-HDBK-17-3F
Decolon, C.: Analysis of Composite Structures. Butterworth-Heinemann, Oxford (2004)
Acknowledgements
The first of authors thank for supporting this research by grant VEGA 1/0910/17 and 1/0983/15 of Agency of Ministry of Education of Slovak Republic.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that there is no conflict of interests regarding the publication of this paper.
Rights and permissions
About this article

Cite this article
Murčinková, Z., Novák, P., Kompiš, V. et al. Homogenization of the finite-length fibre composite materials by boundary meshless type method. Arch Appl Mech 88, 789–804 (2018). https://doi.org/10.1007/s00419-018-1342-5
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00419-018-1342-5