
Abstract
Determination of forces applied on structures and machines is very important in engineering. A dynamic force estimation method based on regularized total least squares method in time domain is proposed in this paper. This method can deal with errors in both system models and measured vibration responses, the latter of which are contaminated by white noise. A numerical test is made to illustrate the effectiveness of this force estimation method, and the numerical results obtained by the proposed method are shown to be more accurate than those from the conventional regularized least squares method.
Similar content being viewed by others
Avoid common mistakes on your manuscript.
1 Introduction
Accurate determination of dynamic input forces experienced during operation of machines and service life of structures is vitally important in structural reliability analysis and design, structural health monitoring, and fatigue life prediction and so on. In general, the characteristics of a dynamic force are directly captured by a force transducer positioned in the load transfer path. In many circumstances, however, it is difficult or impossible to implement such a technique. For instance, the desirable locations for sensors may be inaccessible, or the sensors may intrude on the load path or alter structural properties. Thus, an analyst may resort to indirect methods, which have been widely used in force reconstruction based on an inverse analysis. This inverse analysis deduces the dynamic input force from measured vibration responses. It can overcome the difficulties encountered in direct measurement techniques, although it may face other difficulties associated with ill-posedness in solutions.
There are a number of published works on using measured vibration responses to estimate dynamic input forces. Reviews of different dynamic force estimation methods can be found in [1–6]. The techniques are generally either in frequency domain or in time domain. Frequency domain techniques have been developed since 1970s. Barlett and Flannelly [7] reconstructed the dynamic force acting on helicopter spindles using measured acceleration responses in frequency domain. Hillary and Ewins [8] studied the problem of sinusoidal load estimation of a cantilever beam and the identification of impact force on aircraft engine turbine blades with a least squares estimation method from measured strain data. Starkey and Merrill [9] showed that the frequency response functions in frequency domain technique were severely ill-conditioned near resonant frequencies of structures, and regularization techniques were used in solutions. The frequency domain approach also has some limitations. It is difficult to obtain sufficient sampling data of vibration responses in the reconstruction of impact forces and prohibits real-time or nearly real-time force estimation. The estimation results of frequency domain method are generally magnitude and phase of dynamic input forces and cannot visually display the time history of estimated forces. Thus, time domain techniques have been developed in recent years.
Many time domain force reconstruction algorithms have been developed by researchers. Martin and Doyle [10, 11], Wu et al. [12, 13], Araujo et al. [14], Antunes et al. [15], Chang et al. [16–18], Meo et al. [19], Gunawan et al. [20] and Hu et al. [21, 22] studied the impact force identification problem, including reconstruction of the time history of impact, determining locations of impact and real-time impact identification. An inverse structural filter (ISF) method [23, 24] was derived by inverting the discrete time equation of motion, resulting in a dynamic system that took structure’s responses as input and returned the estimation of the forces acting on the structure as output. The limitation of this method is that the ISF derived from the forward system models is unstable, yielding highly erroneous estimates of forces acting on a structure. In order to enhance the stability of ISF, Allen and Carne [25] proposed a delayed multi-step ISF (DMISF) to yield a stable inverse system to estimate dynamic forces acting on structures in real time. Ma et al. [26] put forward a force estimation method composed of extended ISF and a recursive least squares estimator to identify the input force of nonlinear structural systems. The sum of weighted acceleration technique (SWAT) [27] is another useful time domain force reconstruction method applied to a variety of real-world impact and collision problems. The limitation of this technique lies in the fact that it can only reconstruct the sum of the external forces acting on a body’s center of mass but not the individual applied forces. Genaro and Rade [28] put forth a method based on a variation of SWAT. Their method used an integration of the acceleration to generate velocities and displacements and utilized the inversion of modal matrices to solve the equations of motion to yield the input forces. The limitation of their method is that the number of sensors must be equal to or greater than the number of participating modes.
In recent years, force identification methods based on singular value decomposition and regularization techniques have been studied by many researchers [29–33]. Jacquelin et al. [29] reconstructed the input force by analyzing a deconvolution problem and used regularization techniques based on singular value decomposition to enhance the stability of estimation results. Zhu and Law [30] treated the moving force estimation problem and discussed the influence, on moving force identification, of practical aspects such as measurement noise, sampling frequency, the number of measured response modes, the number of measured points, road surface roughness and nonuniform velocity or braking of vehicle. They also used a regularization technique to stabilize the identification procedure. Mao et al. [31] built an efficient and precise force identification model that could eliminate computational errors within the scope of general computer precision, but the white noise in measured responses still made the force estimation problem ill-posed. In order to overcome the ill-posedness of force estimation problem, a singular value decomposition technique and a regularization technique were utilized to improve the stability of the identification results. Huang [32] used the conjugate gradient method also known as iterative regularization method to estimate the external force in a damped system with displacement-dependent spring constant and damping coefficients. Gunawan [33] proposed a Levenberg–Marquardt iterative regularization technique to reconstruct pulse-type impact force. Two numerical examples were used to evaluate his method, and the results showed that it is useful and requires less computer memory, unlike the SVD-based regularization techniques.
Although many force estimation algorithms have been developed so far, they have not been widely used in engineering applications. The force estimation approaches developed thus far have various limitations when they are applied in practical engineering. The primary one is the fact that most of them mainly focus on the influence on the accuracy of force identification of noise in measured vibration responses, but neglect the discrepancies between the numerical models and the real structures. For relatively simple structural systems, the system identification methods [34, 35] and model updating methods developed by researchers [36–41] could be utilized to construct sufficiently accurate numerical models. In real engineering, however, there are always considerable modeling errors between the numerical models and physical structures, especially complex operating systems such as rockets during launch and flight, due to the coupling effects among different components within systems, and strongly nonlinear behavior of structures in certain operating states. Thus, the force estimation results are also simultaneously affected by modeling errors, in addition to noise in measured vibration responses, the limitation of the location and number of measurement points. This is why most force estimation algorithms cannot obtain accurate enough identification results in practical engineering. To overcome the difficulties reviewed above, a force reconstruction method should account for the presence of both noise in measured responses and modeling errors. Liu and Shepard [42] and Zhang et al. [43] proposed a force identification method, respectively, which dealt with both the noise in measured responses and modeling errors in frequency response functions.
This paper presents a time domain force estimation method that deals with both modeling errors in structural systems and noise in measured vibration responses, where the modeling errors are introduced in structural system matrix in state space. A theoretical development is first presented, and numerical simulations are then carried out to demonstrate the validity of the proposed method. Like other force estimation problems, this force estimation problem is still ill-posed due to the noise and modeling errors. A regularization technique based on total least squares method is incorporated to stabilize the force estimation results.
2 Dynamic force estimation models for errors-in-variables modeling
In state space, the governing equation of motion of a general time-invariant linear system is as follows
in which \(\mathbf{x}\) represents the state vector, \(\mathbf{A}\) is the system matrix, \(\mathbf{B}\) is the input matrix, \(\mathbf{f}\) is the force vector. In the case of a modal representation of a vibrating structure given by
\(\mathbf{A}, \mathbf{B}\) and \(\mathbf{f}\) are
In the above, \(\varvec{\upomega }\) is diagonal matrix of the modal frequencies, \(\varvec{\upzeta }\) is diagonal matrix of the modal damping coefficients (proportional viscous damping is assumed in this paper), and \(\varvec{\upchi }_\mathbf{a}\) is the modal matrix, respectively. \(\mathbf{p}\) is the force vector, and q is the modal coordinate vector. x now is the modal responses in state space \([{\begin{array}{l@{\quad }l} \mathbf{q}&{} {\dot{\mathbf{q}}} \\ \end{array} }]^{\mathbf{T}}\). In general, the modal parameters \(\varvec{\upomega },\, \varvec{\upzeta }\) and \(\varvec{\upchi }_\mathbf{a} \) are obtained from modal tests or numerical models. There are always discrepancies between the numerical models and real engineering structures, although modal analysis techniques and model updating methods have been used to improve theoretical models for many years. The deviations of modal frequencies, modal damping and modal shapes are defined as \(\Delta \varvec{\upomega },\, \Delta \varvec{\upzeta }\) and \(\Delta \varvec{\upchi }_\mathbf{a} \), respectively. Considering modeling errors, the modal parameters are \(\varvec{\upomega }\rightarrow \tilde{\varvec{\upomega }}=\varvec{\upomega }+\Delta \varvec{\upomega },\,\varvec{\upzeta }\rightarrow \tilde{\varvec{\upzeta }}=\varvec{\upzeta }+\Delta \varvec{\upzeta }\) and \(\varvec{\upchi }_\mathbf{a} \rightarrow \tilde{\varvec{\upchi }}_\mathbf{a} =\varvec{\upchi }_\mathbf{a} +\Delta \varvec{\upchi }_\mathbf{a} \), respectively. \(\Delta ({\bullet })\) represents the uncertainty of a quantity. Matrices \(\mathbf{A}\) and \(\mathbf{B}\) in Eq. (1) are also changed into \(\tilde{\mathbf{A}}\rightarrow \mathbf{A}+\Delta \mathbf{A},\quad \tilde{\mathbf{B}}\rightarrow \mathbf{B}+\Delta \mathbf{B}\), respectively. \(\Delta \mathbf{A}\) and \(\Delta \mathbf{B}\) are deviations caused by uncertainty of modal parameters \(\Delta \varvec{\upomega },\, \Delta \varvec{\upzeta }\), and \(\Delta \varvec{\upchi }_\mathbf{a} \). In state space, Eq. (1) becomes
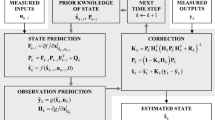
Using Pade approximations [44], Eq. (4) can be solved in discrete time domain as
In the above, \(\mathbf{T}=\exp (\tilde{\mathbf{A}}\Delta t)\) is an exponential matrix computed by precise time-integration method [31]. \(\mathbf{I}\) is an identity matrix, \(\Delta t\) is the time step in discrete time domain, and \(N_t\) is the number of sampling points in time domain. \(\tilde{\mathbf{y}}\) are the measured responses, and Eq. (6) is the corresponding observation system. \(\mathbf{C}\) is the output matrix corresponding to components of the measured responses. In fact, the outputs and inputs are linked by a convolution integral. Eq. (6) can be further written in matrix form after time domain discretization of the convolution integral [31],
In the above, \(\tilde{\mathbf{Y}}\) are the measured quantities related to initial condition and generally contain white noise in measurement, \(\mathbf{F}=[{\begin{array}{llll} {\tilde{\mathbf{f}}(0),}&{} {\tilde{\mathbf{f}}(1),}&{} {\cdots ,}&{} {\tilde{\mathbf{f}}(N_t -1)} \\ \end{array} }]^{T}\) is the input force vector, and \(N_t \) is the number of sampling points in time domain. \(\tilde{\mathbf{H}}\) is a lower triangular Toeplitz matrix with parameters \(\mathbf{C},\, \mathbf{T},\, \tilde{\mathbf{A}}\) and \(\tilde{\mathbf{B}}\). Eq. (7) is the dynamic force estimation model considering the noise in measured vibration responses and modeling parameters, where matrix \(\tilde{\mathbf{H}}\) contains system matrix \(\tilde{\mathbf{A}}\) and input matrix \(\tilde{\mathbf{B}}\) including deviations caused by modal errors \(\Delta \varvec{\upomega },\, \Delta \varvec{\upzeta }\) and \(\Delta \varvec{\upchi }_\mathbf{a}\).
3 Regularized solutions based on total least squares method
The force identification model as presented in Eq. (7) is ill-posed due to the lack of continuous dependence of the solution on the measured data. Thus, not only the measured data \(\tilde{\mathbf{Y}}\) are contaminated by white noise, but also matrix \(\tilde{\mathbf{H}}\) contains deviations which can be defined as \(\Delta \tilde{\mathbf{H}}\). These deviations are due to system errors \(\Delta \mathbf{A}\) and \(\Delta \mathbf{B}\) caused by uncertainties \(\Delta \varvec{\upomega },\, \Delta \varvec{\upzeta }\) and \(\Delta \varvec{\upchi }_\mathbf{a} \) in modal parameters \(\varvec{\upomega },\, \varvec{\upzeta }\) and \(\varvec{\upchi }_\mathbf{a} \). For the convenience of analysis, the deviation caused by the errors in measured responses is denoted by \(\Delta \tilde{\mathbf{Y}}\). An appropriate treatment of this force estimation problem is the total least squares formulation [45, 46]. In contrast, if only measured data \(\tilde{\mathbf{Y}}\) contain noise, then the corresponding force estimation model can be treated by a least squares method [29–31]. The focus in the present paper is on the errors in both system matrix \(\tilde{\mathbf{H}}\) and measured response data \(\tilde{\mathbf{Y}}\). A regularization technique based on the total least squares method will be applied to treat the present force estimation problem. For the original total least squares approaches, the readers can consult [45–50]. For the sake of completeness, the total least squares method applied to force estimation is summarized below.
Like the original least squares method [29–31], a Tikhonov-like regularized total least squares (R-TLS) method is applied to treat the force estimation problem Eq. (7). The formulation of the total least squares problem is thus,
where \(\left\| {\bullet } \right\| _F \) defines the Frobenius norm, \((\tilde{\mathbf{H}},\tilde{\mathbf{Y}})\) is the matrix composed of contaminated system matrix and measured responses, and \((\mathbf{H},\mathbf{Y})\) is the matrix without errors. The dynamic force estimation problem as Eq. (8) is equivalent to finding deviations in matrix \(\tilde{\mathbf{H}}\) and vector \(\tilde{\mathbf{Y}}\) leading to minimal Frobenius norm. The composite matrix can be analyzed in terms of singular valued decomposition,
where \(\sigma _1 \ge \sigma _2 \ge \ldots \ge \sigma _{n+1} \ge 0\) are the singular values of \((\tilde{\mathbf{H}},\tilde{\mathbf{Y}})\) and \(n\) is the number of columns of matrix \(\tilde{\mathbf{H}}\). \(\mathbf{U}\) and \(\mathbf{V}\) are matrices formed by the left and right singular vectors, respectively. Note that the singular values \(\sigma _i^{\prime } \) of \(\tilde{\mathbf{H}}\) interlace those of \((\tilde{\mathbf{H}},\tilde{\mathbf{Y}})\), i.e., \(\sigma _1 \ge \sigma _1^{\prime } \ge \sigma _2 \ge \ldots \ge \sigma _n \ge \sigma _n^{\prime } \ge \sigma _{n+1} \) [46]. In dynamic force estimation, \(\tilde{\mathbf{H}}\) has a full column rank, that is \(\sigma _n^{\prime } >0\) and \(\sigma _n >\sigma _{n+1} \). Then, the minimum perturbation data of \((\tilde{\mathbf{H}},\tilde{\mathbf{Y}})\) are attained for the rank one perturbation [51], so that the minimum is attained for the rank one perturbation as given below
for which \(\left\| {\Delta \tilde{\mathbf{H}},\Delta \tilde{\mathbf{Y}}} \right\| _F =\sigma _{n+1} \). A total least squares solution is then obtained from the right singular vector
Since the matrix \(\tilde{\mathbf{H}}\) is of full column rank in force estimation and the condition \(\sigma _n^{\prime } \ge \sigma _{n+1} \) is satisfied in force estimation problem, parameter \(\gamma \ne 0\) is assured. From Eq. (11), it follows that the regularization parameter \(\lambda \) and the total least squares solution satisfy the following equation (cf. ref. [46]),
The first row in Eq. (12) can be written as
The condition \(\sigma _n^{\prime } \ge \sigma _{n+1} \) in force estimation problems is always satisfied. According to Ref. [50], the regularization parameter can be selected as \(\lambda =\sigma _{n+1}^2 \), and then the total least squares solution can be computed from Eq. (13).
4 Numerical tests
In order to validate the proposed dynamic force estimation method using the Tikhonov-like regularized total least squares method (FE-RTLS), as described in the previous section, the proposed method will be applied to a simulation example. Both noise in the ‘measured’ responses and modeling errors are considered, the inverse problem is ill-posed, and therefore, these uncertainties are amplified. For validation purpose, the estimation results obtained by FE-RTLS are compared with those from the regularized least squares method (RLS).
4.1 Errors in numerical tests
In this numerical test, the errors include the white noise in ‘measured’ vibration responses, the deviation of the numerical model from the ‘physical’ structures and the relative errors of estimated forces. In practical engineering, the measured data often contain losses or distortions due to the limited range of measurement data and limited number of sensors. In the numerical test, white noise is added to the calculated responses \(\tilde{\mathbf{Y}}\) in Eq. (7) to simulate contaminated vibration responses in practical engineering
In the above, \(\mathbf{Y}\) is the vector of the calculated vibration responses, and \({\text{ NP }_{y}}\) is the white noise level in measured responses ranging from 0.0 to 1.0. The \(\varvec{\upeta }_y \) is a random noise vector in measured data with zero mean and unit standard deviation.
In numerical computations, the mathematical models always have some degrees of deviation from operating states of physical systems. In the present paper, the deviation in only mass, damping and stiffness is considered, for the sake of simplicity. Hence, the modeling errors are reflected by the modal frequencies, modal damping and modal shapes. The deviations of modal parameters are then,
In the above, NP is white noise level of modal parameters, \(\varvec{\upeta }_{\varvec{\upomega }} ,\,\varvec{\upeta }_{\varvec{\upchi }\mathbf{a}}\) and \(\varvec{\upeta }_{\varvec{\upzeta }}\) are random noise vectors of modal frequencies, modal shapes and modal damping, with zero mean and unit standard deviation. The \(\hbox {N}_\mathrm{o}\) is the number of modes involved. These deviations \(\Delta \varvec{\upomega },\, \Delta \varvec{\upchi }_\mathbf{a} \) and \(\Delta \varvec{\upzeta }\) introduce errors into system matrix \(\tilde{\mathbf{A}}\) and \(\tilde{\mathbf{B}}\) and further bring deviations into matrix \(\tilde{\mathbf{H}}\) in Eq. (6). Finally, the relative errors of estimated forces are
where \(F_{\mathrm{true}} \) and \(F_{\mathrm{est}} \) are the actual input forces and the estimated ones, respectively. \(\hbox {abs}({\bullet })\) denotes the absolute value.
4.2 The numerical test model
The numerical model displayed in Fig. 1 is a plane truss structure which consists of 24 planar bars. The length of each bar is 5 m, the mass per unit length is 4407 kg/m, and the tensile stiffness is \(1.7\,\times \,10^{10}\,\hbox {N/m}\). The first ten natural frequencies of the structure are shown in Table 1, and the fundamental natural frequency is 15.0 Hz. Two excitation forces \(F_1\) and \(F_2 \) are applied on the two top nodes for a duration of 2 s, respectively. The two forces are
In the above, \(t\) is a function of time. The responses at nodes marked ‘s1’ to ‘s4’ in Fig. 1, with added white noise according to Eq. (14), are regarded as ‘measured’ data. In the subsequent force estimation process, the modal damping ratio is 2 % for all modes involved; the sampling frequency is 150 Hz; and the number of sampled data points is 300.

The plane truss structure
To demonstrate the application of the proposed method to dynamic force estimation, two test cases with different amounts of white noise in vibration responses and system parameters are simulated. In the first case, the vibration response noise level \({\text {NP}_{y}} \) in Eq. (14) and the modal parameter noise level NP are selected as \({\text{ NP }_{y}} =0.01\) and NP = 0.001 and 0.003, respectively. In case two, the noise parameter noise level is taken as \({\text{ NP }_{y}}\,=\,0.02\) and NP = 0.001 and 0.003, respectively.
4.3 Comparison of estimated results from different methods
For the sake of demonstrating the effectiveness of the proposed method, the identified results obtained by the present method (FE-RTLS) are compared with those from the least squares method based on Tikhonov regularization technique (RLS) where the regularization parameter is selected by GCV method [18].Figs. 2 and 3 display the time histories and relative errors of the input forces estimated by FE-RTLS and RLS, respectively, for the first case. On the whole, these identified results agree well with the actual input data. It can be seen that the estimation results gained by FE-RTLS are better than those obtained by RLS. In Figs. 4 and 5, the same types of results acquired by FE-RTLS and RLS for case two are shown. In comparison, the results from RLS exhibit larger fluctuations in some parts. In addition, it can also be seen that the results obtained by FE-RTLS and RLS both have an increasing level of oscillation, with the increase of noise level in vibration responses and modal parameters. It can be concluded that the FE-RTLS leads to much smaller errors though it cannot totally eliminate influence of uncertainties in the system and white noise in measured vibration responses. Improving the fidelity of a structural dynamics model and the measured signal to noise ratio is still important to enhance the accuracy of force estimation.

Identification results for \({\text{ NP }_{y}} =0.01\) and \({\text{ NP }}=0.001\)

Identification results for \({\text{ NP }_{y}} =0.01\) and NP \(=\) 0.003

Identification results for \({\text{ NP }_{y}} =0.02\) and NP \(=\) 0.001

Identification results for \({\text{ NP }_{y}} =0.02\) and NP \(=\) 0.003
5 Conclusions
Errors in modeling are inevitable when the dynamic force estimation techniques are applied to real engineering applications. In order to improve the force estimation results in practical engineering, a force estimation method based on Tikhonov-like total least squares method is proposed. This method can deal with the dynamic force estimation problem in which the measured vibration responses and system modeling are both contaminated by noise. Numerical tests demonstrate that the force estimation method based on regularized total least squares method (FE-RTLS) is valid provided that white noise is present to some degree. Although the FE-RTLS cannot completely eliminate the effect of white noise in dynamic modeling and measured responses, the forces identified by this method are more accurate and robust than those obtained by applying the regularized least squares method within a certain noise level in measured vibration responses and system parameters.
References
Stevens, K.K.: Force identification problems–an overview, In: Proceedings of the 1987 SEM Spring Conference on Experimental Mechanics, Houston pp. 838–844 (1987)
Dobson, B.J., Rider, E.: A review of the indirect calculations of excitation forces from measured structural response data. Proc. Inst. Mech. Eng. J. Mech. Eng. Sci. 204(C2), 69–75 (1990)
Innoue, H., Harrigan, J.J., Reid, S.R.: Review of inverse analysis for indirect measurement of impact force. Appl. Mech. Rev. 54(6), 503–524 (2001)
Nordstrom, L.J.L., Nordberg, T.P.: A critical comparison of time domain load identification methods. Proc. Sixth Int. Conf. Motion Vib. Control 2, 1151–1156 (2002)
Gunturkun, U., Reilly, J.P., Kirubarajanm, T., Debruin, H.: Recursive hidden input estimation in nonlinear dynamic systems with varying amounts of a priori knowledge. Signal Process. 99, 171–184 (2014)
Sanchez, J., Benaroya, H.: Review of force reconstruction techniques. J. Sound Vib. 333(14), 2999–3018 (2014)
Barlett Jr, F.D., Flannelly, W.G.: Model verification of force determination for measuring vibration loads. J. Am. Helicopter Soc. 19(4), 10–18 (1979)
Hillary, B., Ewins, D.J.: The use of strain gauges in force determination and frequency response function measurements. In: Proceeding of the 2th IMACA, pp. 627–634 (1984)
Starkey, J.M., Merrill, G.L.: On the ill-conditioned nature of indirect force measurement techniques. J. Modal Anal. 7, 103–108 (1989)
Martin, M.T., Doyle, J.F.: Impact force identification from wave propagation responses. Int. J. Impact Eng. 18, 65–77 (1996)
Doyle, J.F.: A wavelet decomposition deconvolution method for impact force identification. Exp. Mech. 37(4), 403–408 (1997)
Wu, E., Yeh, J.-C., Yen, C.-S.: Identification of impact forces at multiple locations on laminated plates. AIAA J. 32, 2433–2439 (1994)
Wu, E., Tsai, T.-D., Yen, C.-S.: Two methods for determining impact-force history on elastic plates. Exp. Mech. 35, 11–18 (1995)
De Araujo, M., Antunes, J., Piteau, P.: Remote identification of impact forces on loosely supported tubes: part 1-basic theory and experiments. J. Sound Vib. 215(5), 1015–1041 (1998)
Antunes, J., Paulino, M., Piteau, P.: Remote identification of impact forces on loosely supported tubes: part 2-complex vibro-impact motions. J. Sound Vib. 215(5), 1043–1064 (1998)
Choi, K., Chang, F.K.: Identification of impact force and location using distributed sensors. AIAA J. 34(1), 136–142 (1996)
Seydel, R., Chang, F.K.: Impact identification of stiffened composite panels: I. Syst. Dev. Smart Mater. Struct. 10, 354–369 (2001)
Seydel, R., Chang, F.K.: Impact identification of stiffened composite panels: II. Implement. Stud. Smart Mater. Struct. 10, 370–379 (2001)
Meo, M., Zumpano, G., Piggott, M., Marengo, G.: Impact identification on a sandwich plate from wave propagation responses. Compos. Struct. 71, 302–306 (2005)
Gunawan, F.E., Homma, H., Kanto, Y.: Two-step B-splines regularization method for solving an ill-posed problem of impact-force reconstruction. J. Sound Vib. 297, 200–214 (2006)
Hu, N., Fukunaga, H., Matsumoto, S., Yan, B., Peng, X.H.: An efficient approach for identifying impact force using embedded piezoelectric sensors. Int. J. Impact Eng. 34, 1258–1271 (2007)
Atobe, S., Hu, N., Fukunaga, H.: Real-time impact force identification of CFRP structures using experimental transfer matrices. In: Proceedings of the 14th US-Japan Conference on Composite Materials, Dayton, p. 1058 (2010)
Kammer, D.C.: Input force reconstruction using a time domain technique, AIAA Dynamics Specialists Conference, Salt Lake City, UT, pp. 21–30 (1996)
Kammer, D.C., Steltzner, A.D.: Structural identification using inverse system dynamics. J. Guid. Control Dyn. 23, 819–825 (2000)
Allen, M.S., Carne, T.G.: Delayed, multi-step inverse structural filter for robust force identification. Mech. Syst. Signal Process. 22, 1036–1054 (2008)
Ma, C.K., Ho, C.C.: An inverse method for the estimation of input forces acting on non-linear structural systems. J. Sound Vib. 275, 953–971 (2004)
Carne, T.G., Mayes, R.L., Bateman, V.I.: Force reconstruction using a sum of weighted accelerations technique. In: 10th International Modal Analysis Conference, San Diego (1992)
Genaro, G., Rade, D.A.: Input force identification in the time domain. In: 16th International Modal Analysis Conference, Santa Barbara (1998)
Jacquelin, E., Bennani, A., Hamelin, P.: Force reconstruction analysis and regularization of a deconvolution problem. J. Sound Vib. 265, 81–107 (2003)
Zhu, X.Q., Law, S.S.: Practical aspects in moving load identification. J. Sound Vib. 258(1), 123–146 (2002)
Mao, Y.M., Guo, X.L., Zhao, Y.: A state space force identification method based on Markov parameters precise computation and regularization technique. J. Sound Vib. 329, 3008–3019 (2010)
Huang, C.H.: A non-linear inverse vibration problem of estimating the external forces for a system with displacement-dependent parameters. J. Sound Vib. 248(5), 798–807 (2001)
Gunawan, F.E.: Levenberg-Marquardt iterative regularization for the pulse-type impact-force reconstruction. J. Sound Vib. 331, 5424–5434 (2012)
Ewins, D.J.: Modal testing: theory, practice and application. Research Studies Press, London (2003)
Brownjohn, J.M.W., Pavic, A.: Experimental methods for estimating modal mass in footbridges using human-induced dynamic excitation. Eng. Struct. 29, 2833–2843 (2007)
Cottin, N.: Dynamic model updating—a multiparameter eigenvalue problem. Mech. Syst. Signal Process. 15(4), 649–665 (2001)
Devriendt, C., Guillaume, P.: Identification of modal parameters from transmissibility measurements. J. Sound Vib. 314, 343–356 (2008)
Mottershead, J.E., Friswell, M.I.: Model updating in structural dynamics: a survey. J. Sound Vib. 167(2), 347–375 (1993)
Katayama, T.: Subspace methods for system identification. Springer, New York (2005)
Kerschen, G., Worden, K., Vakakis, A.F., Golinval, J.C.: Past, present and future of nonlinear identification in structural dynamics. Mech. Syst. Signal Process. 20(3), 505–592 (2006)
Marchesiello, S., Garibaldi, L.: A time domain approach for identifying vibrating structures by subspace methods. Mech. Syst. Signal Process. 22, 81–101 (2008)
Liu, Y., Shepard Jr, W.S.: Dynamic force identification based on enhanced least squares and total least-squares in the frequency domain. J. Sound Vib. 282, 37–60 (2005)
Zhang, E., Antoni, J., Feissel, P.: Bayesian force reconstruction with an uncertain model. J. Sound Vib. 331, 798–814 (2012)
Trujillo, D.M.: The direct numerical integration of linear matrix differential equations using Pade approximations. Intern. J. Numer. Method Eng. 9(2), 259–270 (1975)
Golub, G.H., Van Loan, C.F.: An analysis of the total least squares problem. SIAM J. Numer. Anal. 17, 883–893 (1980)
Golub, G.H., Van Loan, C.F.: Matrix computations, 3rd edn. Johns Hopkins University Press, Baltimore (1996)
Hansen, P.C., O’Leary, D.P.: The use of the L-curve in the regularization of discrete ill-posed problems. SIAM J. Sci. Comput. 14(6), 1487–1503 (1993)
Golub, G.H., Hansen, P.C., Oleary, D.P.: Tikhonov regularization and total least squares. SIAM J. Matrix Anal. Appl. 21(1), 185–194 (1999). DIANNE P O’LEARY
Huffel, S.V., Lemmerling, P.: Total least squares and errors-in-variables modeling. Kluwer Academic Publishers, Berlin (2002)
Kamm, J., Nagy, J.G.: A total least squares method for Toeplitz systems of equations. BIT 38, 560–582 (1998)
Fierro, R.D., Golub, G.H., Hansen, P.C., Oleary, D.P.: Regularization by truncated total least squares. SIAM J. Sci. Comput. 18(4), 1223–1241 (1997)
Acknowledgments
The present investigation is supported by the Natural Science Foundation of China under grant 11102115.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article

Cite this article
Mao, Y.M., Zhang, W.D., Ouyang, H. et al. Input force estimation accounting for modeling errors and noise in responses. Arch Appl Mech 85, 909–919 (2015). https://doi.org/10.1007/s00419-015-1000-0
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00419-015-1000-0