
Abstract
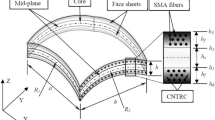
The vibration and damping characteristics of carbon nanotubes reinforced (CNTR) skewed shell structure under a hygrothermal environment have been investigated using the finite element method. CNT as reinforcing phase and polymer as matrix phase are considered for the nanocomposites (NCs) based viscoelastic skewed shell structure. Dynamic mechanical analysis is used to conduct the creep test for NCs samples which were fabricated, as per ASTM-D4065 standard, and obtained the viscoelastic properties in the frequency domain under different hygrothermal conditions. The shell geometry is defined by considering an arbitrary coordinate system for the skewed shell structure. Finite element modelling has been done with Serendipity element with five degrees of freedom in all eight nodes. The present formulation is based on Koiter’s shell theory and first-order shear deformation theory is considered to incorporate the transverse shear effect based on Mindlin’s hypothesis. The frequency dependant viscoelastic properties are directly used to obtain the frequency responses of the skewed shell panel using fast Fourier transform (FFT) whereas the transient responses are determined using inverse fast Fourier transform (IFFT). An in-house MATLAB code is developed for the numerical simulation and the accuracy of the proposed formulation is validated with available results in literatures and using ANSYS software. A parametric study has been carried out for the skewing angle and CNT volume fraction on the vibration behaviour of different thin and thick NC skewed shell structures under various hygrothermal conditions.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Nanocomposite-based shell structures are a dedicated section of structural applications in various hygrothermal conditions for many engineering applications because of their enhanced mechanical and damping properties over isotropic materials. The carbon nanotubes (CNT) discovered by Ijima [1], since then it has been used in several applications due to its large aspect ratio and lower specific weight which improves the overall elastic properties of nanocomposites (NC). The CNT reinforced with epoxy composites were tested and showed the results that CNT has a more significant impact on damping ratio than the stiffness by Rajoria and Jalili [2]. The hygrothermal effects on the conventional CFRP composites are experimentally studied by Collings and Stones [3]. The thermal and mechanical properties of MWCNT reinforced epoxy-based material are reported by Gojny et al. [4]. The authors suggested that the improved dispersion can be achieved by chemical functionalization of inclusions in the matrix phase. Results of moisture diffusion are presented for the conventional composites by David [5] and reported that CNT makes NC ideal for several engineering applications in critical hygrothermal environments and enhances its damping properties.
The strains produced due to hygrothermal conditions in the laminated beams were studied by Lee et al. [6] and presented the characterisation of the elastic and damping properties of such composites. The coefficient of thermal expansion for such a material system is assumed to be transversely isotropic. Zhang and Wang [7] presented results for the different thermal and moisture expansion of the composite material system. The strains developed in composite material under a hygrothermal environment were studied by Nanda and Pradyumna [8]. The inclusion of CNTs in nanocomposites results in a decrease in creep strains by 53% compared to epoxy matrix. The authors predicted the long-term creep behaviour of the nanocomposites by time–temperature superposition in dynamic mechanical analyser by Jia et al. [9]. The indentation tests are carried out at high temperature to determine the mechanical properties of nanocomposite-based material system and CNT has a significant impact on improving the damping properties of such composites were also presented by Teharani et al. and Saseedharan et al. [10, 11].
An experimental study carried out under the hygrothermal conditions to observe the performance of CNT reinforced epoxy materials by Jen and Huang [12]. Creep and time–temperature superposition tests were also conducted to obtain the viscoelastic properties of nanocomposites. The effect of hygrothermal treatments on mechanical properties of CFR in resin-based composites is discussed and reported by Yizhuo et al. [13]. A significant decrease was observed in the mechanical properties of such conventional composites at higher moisture exposure by Garg et al. [14].
The viscoelastic properties of short fibers reinforced composite were obtained and the creep behaviour has been analysed for glass fiber reinforced epoxy-based composites by Burgarella et al. [15] and Hagenbeek et al. [16] using dynamic mechanical analysis. Significant improvement of damping ratio was observed by the incorporation of CNT in the different composite shell structures by Khan et al. [17] and Patnaik et al. [18, 19]. In recent years, the researchers have extensively studied the free and forced vibration of different composite plate and shell structures. The effect of frequency and temperature-dependent homogenized CNT-CFRP material property on the damping of different plate/shell structures was studied by Swain and Roy [20]. The effect of CNT on damping of such CNT reinforced composite-based skew shell structures was presented by Kiani et al. [21, 22]. The author has used an oblique coordinate system to skew the structure in this research work. Mahapatra et al. [23] presented the hygro-thermo-elastic constitutive relationship-based mathematical formulation for the nonlinear free vibration study of the laminated composite shell structure. The literatures on free and forced vibration of different NC-material-based skew shell structures are limited (for example, Kandasamy and Singh [24], Shojaee et al. [25] and Biswal et al. [26]).
Parametric vibration analysis has been done for the multi-scale hybrid nanocomposites-based plate/shell structures by Ebrahimi and Dabbagh [27, 28]. The improved mathematical formulation for smart fiber-reinforced composites has been presented by Roy et al. [29]. Vibration analysis for different shell structures with improved shear deformation theory is presented by Sangtarash et al. [30] and Mallek et al. [31]. Free vibration studies of glass fiber reinforced shallow shells based on first-order shear deformation theory have been done with finite element modelling under hygrothermal conditions. The hygrothermal effect on different geometries of shell structures were presented by Sinha and Naidu [32] and, Biswal and Karimiasl and Tsai et al. [33,34,35,36]. It is also found that extensive research work has been carried out for static and bucking analysis of NC-based CNT reinforced shell structures in recent times but any possible frequency dependant NC-based materials have not been considered for several applications under hygrothermal conditions. Kundalwal and Rathi [37] developed cluster-free and uniform dispersion of multiwalled carbon nanotubes (MWCNTs) in the epoxy matrix using an innovative ultrasonic dual mixing technique. The effects of dispersion of MWCNTs on the mechanical and viscoelastic properties of MWCNT-epoxy nanocomposites were reported. Kundalwal [38] presented an extensive review on the thermomechanical properties of fiber-reinforced composites using several micromechanics models (such as the strength of the material approach, Halpin–Tsai equations, multi‐phase mechanics of materials approaches, multi‐phase Mori–Tanaka models, composite cylindrical assemblage model, Voigt–Reuss models, modified mixture rule, Cox model, effective medium approach and method of cells). Detail investigations of active constrained layer damping (ACLD) of smart laminated continuous fuzzy fiber-reinforced composite (FFRC) plate and shell structures were presented by Kundalwal and Ray [39, 40]. A finite element model was developed for such laminated structures integrated with the patches of ACLD treatment.
Nanocomposites-based structures have many applications in several engineering fields. Many literatures are available for free vibration study of the nanocomposites and nanocomposite made structures but under hygrothermal conditions, the NCs are vulnerable, due to this limitation it is very important to carry out an extensive research to study the effective volume fraction of CNT impact on the vibration and damping responses of NCs based shell structures under different hygrothermal conditions. The present research work used the dynamic mechanical analysis for the experimental viscoelastic material properties of NCs in the frequency domain. For the damping characteristics, the frequency dependant material properties cannot be directly used in the time domain so inverse fast Fourier transform (IFFT) has been employed to determine the time response of the said structure. The moisture and temperature dependant viscoelastic material properties of NCs are used to calculate effective hygrothermal stiffness of the skewed shell structure to study the damping behaviour under different hygrothemral conditions. Effect of CNTs on such CNTR viscoelastic skewed shell structure under hygrothermal environment has been done by the parametric vibration study (viz. resonant frequency, loss factor of the system etc.).
2 Mathematical modelling
Viscoelastic material properties of NCs are determined with the help of dynamic mechanical analysis. The frequency dependant properties are then used to investigate the damping behaviour of the skewed shell structure. The arbitrary coordinate system has been considered to define the skewed shell geometry which was used in finite element modelling to study the dynamic behaviour of the said structure under different hygrothermal conditions.
2.1 Creep test using dynamic mechanical analysis
Dynamic mechanical analysis machine is used to determine the CNT-based epoxy matrix material properties by making samples as per the American Society for Testing and Materials ASTM-D4065 standard. Atleast 5 samples of NCs were made with 12 h of ultrasonic sonication to minimise the agglomerations. Several tests were conducted and averaged the test data obtained for the exact prediction of creep strain behaviour. The creep strain is obtained by conducting such procedure on DMA-8000 (as shown in Fig. 1) and power law is used to calculate the prony constants. Laplace transform is used to obtain the frequency dependant viscoelastic material properties of such NCs.

a Dynamic mechanical analysis-8000 under tension support, b nanocomposite samples (i) 0% volume fraction of CNT (ii) 4% volume fraction of CNT and (iii) 8% volume fraction of CNT and c dynamic mechanical analysis connected to auxiliary humidifier setup
The short term creep test experiments conducted on DMA-8000 for the polymer-based nanocomposites samples and obtained the creep compliance \(D\left(t\right)\) with creep strain \(\varepsilon \left(t\right)\) in time domain.
Further, the power law is used for determining the Prony fitting constants as shown in Eq. (2)
Once the long term creep strain fitting has been obtained based on the power law, Prony fitting constants are determined in terms of \({E}_{i}\) and \({\tau }_{i}\). Plain epoxy (L-12-type) is tested on DMA-8000 (shown in Fig. 1a) and Prony constants are obtained from the long-term creep power law fitting at room temperature and moisture condition (mentioned in the Table 1).
The Prony constants are used to determine the relaxation modulus of such composites in the time domain. The mathematical fitting of the relaxation model originates from the Maxwell generalized model with Prony fitting constants. The Maxwell generalized model is the common linear viscoelastic model and according to the Hook’s law, the stress–strain relation for the Maxwell generalized model can be written as:
where; \({\sigma }_{\infty }\) and \({\in }_{\infty }\) are the stress and strain in the spring element which is also connected to a dashpot element.
So the relaxation modulus \(E\left(t\right)\) can be expressed as:
The obtained Prony constants are not completely fitting constants but are essential parameters with physical significance in the formulation. The Prony constants are further used to determine the storage modulus \({E}^{{\prime}}\left(\omega \right)\) and loss modulus \({E}^{{\prime}{\prime}}\left(\omega \right)\) in the Laplace transform from Eq. (4) as:
In the Eq. (5 and 6), the storage modulus \({E}^{{\prime}}\left(\omega \right)\) and loss modulus \({E}^{{\prime}{\prime}}\left(\omega \right)\) are obtained in the frequency domain with using the Laplace transform. Where, \(\omega\) is the angular frequency and \(i=\sqrt{-1}\) imaginary number and \(E\left(\omega \right)\), \({E}_{0}\), \(\omega\) are frequency-dependent modulus, instenteneous modulus, and frequency respectively. \(\tau (i)\), and \(E(i)\) are Prony constants.
2.2 Finite element modelling of CNTR skewed shell
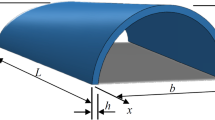
An oblique coordinate system is considered for defining the skewed shell structure geometry as shown in Fig. 2. The stress-resultant type Koiter’s shell theory is used in the finite element (FE) formulation by using the shear deformation effect according to Mindlin’s hypothesis [29].

Geometry and isoparametric mapping of skewed spherical shell
2.2.1 Geometry of CNTR skewed shell structure
The mid-surface of the shell surface can be described in terms of position vector as
where, \(\mathop i\limits^{ \wedge }\), \(\mathop j\limits^{ \wedge }\) and \(\mathop k\limits^{ \wedge }\) are unit vectors along the X, Y and Z axis, respectively. Normal Cartesian coordinate system (X, Y) can be written in the form of oblique coordinate system (X’, Y’) with tangent to edge [21, 22] which can be expressed as follows
The tangent to the isoparametric curves Sα1 and Sα2 are
The vector joining two points on the middle surface (α1, α2) and (α1 + d α1, α2 + d α2) is given as
The scalar product of ds
Defining
As the Lame’s parameters or measure numbers that are fundamentals for the understanding of curvilinear coordinates,
Since the α1 and α2 are independent coordinates
The unit tangent vectors to the isoparametric curve Sα1 and Sα2 can be expressed respectively as
The subscripts 1 and 2 in r, 1 and r, 2 indicate the derivative with respect to α1 and α2 respectively. The unit normal vector to the tangent plane of any point on the reference surface can be expressed as
The normal curvatures of the shell midsurface can be expressed as
and the twist curvatures of the shell midsurface can be expressed as
2.2.2 Mapping of the isoparametric element
The shell mid-surface in the rectangular cartesian coordinate system has been mapped into the parametric space \((\alpha_{1} ,\alpha_{2} )\) and the mid-surface in the parametric space has been divided into the required number of quadrilateral elements or sub-domains. The reference coordinates \((\xi ,\eta )\) map the quadrilateral element in the curvilinear coordinates \((\alpha_{1} ,\alpha_{2} )\) into the reference coordinates that is a square as shown in Fig. 2. Any point within an element in the parametric space has been approximated by the isoparametric mapping.
Hence the curvilinear coordinates \((\alpha_{1} ,\alpha_{2} )\) of any point within an element may be expressed as
The displacement components on the shell midsurface at any point within an element may be expressed as
where, nd is the number of nodes in an element and (α1, α2) is the coordinate of midsurface at ith node in curvilinear coordinate system. u0i, v0i and w0i are the deflection of midsurface at ith node in α1, α2 and z directions respectively. θ1i is the rotation of normal at ith node about α2 axis and θ2i is the rotation of normal at ith node about α1 axis.
2.2.3 Strain–displacement relationship
Neglecting normal strain component in the thickness direction, the five strain components of a doubly curved shell may be express as
where, \(\varepsilon_{X^{\prime}X^{\prime}}^{0} ,\varepsilon_{Y^{\prime}Y^{\prime}}^{0} {\text{ and }}\gamma_{X^{\prime}Y^{\prime}}^{0}\) are the in-plane strains of the midsurface in the cartesian coordinate system and \(k_{X^{\prime}X^{\prime}} ,k_{Y^{\prime}Y^{\prime}} {\text{ and }}k_{X^{\prime}Y^{\prime}}\) are the bending strains (curvatures) of the midsurface in the cartesian coordinates system. After incorporating the effect of transverse stain in Koiter’s shell theory, inplane and transverse strain–displacement relations may be expressed as described in the following subsections.
2.2.4 In Plane strain displacement elements
The strain components on the midsurface of the shell element are
By using isoparametric 8-noded shell element, the displacement component on the shell midsurface at any point within an element can be expressed as
where, [N] is the shape functions according to Koiter’s shell theory and mentioned in the appendix.
According to Koiter’s shell theory, the midsurface strains and curvatures may be expressed in terms of field variables as
By using 8-noded isoparametric shape functions (mentioned in the appendix), the strain components at any point on the shell mid-surface can be expressed as
2.2.5 Transverse shear strain displacement element
According to the FOST, the transverse shear strain vector of a doubly curved shell element may be expressed as
and hence the transverse shear strain at any point on the shell mid surface can be expressed as
2.2.6 Determination of elemental stiffness matrix and force vector
The A, B and D matrices can be written in the following integral forms
The shear correction factor is taken 5/6 times in the present analysis and the elements of the A, B and D matrices are obtained as below
where A, B and D matrices are extensional strains, coupling matrix, and bending strains respectively. The transformed stiffness matrix is denoted by \((\overline{{Q }_{ij}}{)}_{k}\) of each layer and the element in plane/bending stiffness is \([{K}_{bb}^{e}]\)
The transverse shear matrix is \([{K}_{bb}^{e}]\)
The external force vector is \({\{F}^{e}\}\)
2.2.7 Stiffness calculation from in-plane strains under hygrothermal condition
The in-plane strains [41] due to hygrothermal condition are written as
where,
In Eq. 45a, 45b, \({e}_{k}\) are the non-mechanical strains consisting coefficient of thermal expansion (α) and coefficient of moisture expansion (β). The coefficient of thermal expansion (α) and coefficient of moisture expansion (β) are calculated for the NC based on the CNT volume fraction which is mentioned in the appendix section.
The transformed hygrothermal stiffness matrix is denoted by \(({\overline{{Q }_{ij})}}_{k}^{HT}\) of each layer and the element in plane/bending stiffness is \({[{K}_{bb}^{e}]}^{HT}\)
2.2.8 Effective elemental stiffness matrix
The effective stiffness matrix of the element under the hydrothermal conditions can be written as
The elemental dynamic equation of motion can be written as
The element mass matrix \(\left[{M}_{uu}^{e}\right]\) can be obtained as
where, \(\left[N\right] and [\rho ]\) matrices are mentioned in the appendix section.
Global equation of motion after assembling the elemental mass and stiffness matrices can be written as follows
The complex stiffness matrix of viscoelastic material can be written as
In Eq. 56, \({K}_{R}\left(\omega \right)\) and \({K}_{I}\left(\omega \right)\) are the real and imaginary parts of the complex stiffness matrix (\(K\left(i\omega \right)\)) in frequency domain.
2.3 Free vibration of the skewed shell structure
Equation of motion for free vibration analysis can be expressed as
The eigenvalue problem can be further reduced as
The Eigenvalue Eq. 58 is nonlinear complex equation where λ are the eigenvalues and X are the eigenvectors of the structure. Expression of complex eigenvalue can be written as
The jth modal frequency and loss factors are ωj and ηj respectively. The modal parameters ωj, ηj and Xj are obtained from the modified model strain energy method [42,43,44]. The parameters are assumed to be converged when
where, ωj(k) indicates jth model frequency evaluated at kth iteration and ɛe is a very small scaler quantity (~ 10–6).
The complex form of natural frequency can be further used for the determination of the modal loss factor of the structure/system as follows
2.4 Frequency responses of the skewed shell structure
The frequency response analysis has been done from Eq. 55, where the force vector {F} and displacement vector {d} take the form of \(\{ F_{0} \} e^{i\omega t}\) and \(\{ d_{0} \} e^{i\omega t}\) where F0, ω and d0 are the amplitude of excitation force, excitation frequency and amplitude of displacement respectively. The dynamic response of the system in the frequency domain can be obtained as
2.5 Transient response of the skewed shell under impulse loading
The time-dependant material properties are essential to determine the transient response from the direct time integration method and mode superposition method [45] but in the present case, the material properties are determined in the frequency domain so the transient response is obtained from the frequency response analysis directly. Frequency spectra of excitation in the time domain can be expressed as
where \(\mathcal{F}()\) represents the Fourier transform of a signal in time domain. tk is a set of discrete time. The complex form dynamic response of the system in the frequency domain can be obtained by solving the equations of the linear system.
The transient response d (t) in the time domain can be determined by the following equation:
where \({\mathcal{F}}^{-1}()\) represents the inverse Fourier transform of a signal in the frequency domain.
3 Results and discussions
A computer code has been developed based on the proposed formulation in the earlier section for analysing the CNTR viscoelastic skewed shell structure under different hydrothermal conditions. The developed mathematical model has been validated with the available results in the available literatures and using ANSYS commercial software for the spherical shell structure which are presented in Table 2. The shell structure has been discretised with 10 × 10 mesh size for the vibration study of various skewed spherical shell structures with the following SSSS boundary condition:
3.1 Material properties of NCs
The NCs with different volume fractions i.e. 0%, 4% and 8% of CNT reinforcement are tested under different hygrothemal conditions on DMA-8000. The creep test is conducted to determine the time dependant storage and loss, modulus of such NCs material in different hygrothermal conditions. The required materials i.e., MWCNTs, and epoxy, are purchased from ADNANO technologies.
3.1.1 Viscoelastic properties of NCs in frequency domain
The nanocomposites samples are made with 0%, 4% and 8% CNT volume fraction (shown in Fig. 1b) as per ASTM-D4065 standard for the polymer based sample testing on the dynamic mechanical analysis (DMA-8000) with auxiliary humidifier setup as shown in Fig. 1c. The material constituents for such composites, are mentioned in Table 3. The creep test is conducted with 3 N constant static loads for the predefined constant stress on the sample under different hygrothermal conditions using the PYRIS software. The auxiliary humidity generator has been used during the test for controlled environment testing on LACERTA software. The creep strain and creep compliance are determined experimentally and calculated the Prony constants with power law fit. Further the Laplace transform has been used to calculate the storage modulus and loss modulus in frequency domain under different hygrothermal conditions. The four hygrothermal cases are considered mentioned in Table 4. The variations of storage/conservative modulus (E’) and loss factor (tan δ) with frequency for different hygrothermal conditions (such as HT 1 and HT 2 cases) are shown in Fig. 3a–d. It can be observed from the Fig. 3 that storage modulus increases with frequency whereas loss factor decreases with frequency. It can also be observed from the Fig. 3 that viscoelastic properties of the nanocomposite are significantly influenced at the higher humidity (HT 2 case). Figure 4a–d depicts the variations of storage modulus (E’) and loss factor (tan δ) with frequency for different hygrothermal conditions (such as HT 3 and HT 4 cases). It is observed that the moisture absorption through the thickness of the NCs sample induced higher strains along with thermal stresses in hygrothermal environment results in significant decrease in the viscoelastic properties.

Modulus and loss factor a storage under HT case 1, b loss factor under HT case 1, c storage under HT case 2, d loss factor under HT case 2

Modulus and loss factor a storage under HT case 3, b loss factor under HT case 3, c storage under HT case 4, d loss factor under HT case 4
3.2 Effects of skewing angle and CNT on spherical shell structure
The free vibration study has been carried out to observe the effect of skewing angle on the spherical shell structure (a = b and R1 = R2 = R) by considering R/a = 10 and a/h = 10 geometry. The skewing angle varies from 0° to 45° for such spherical shell with SSSS boundary condition. The case 1 of the hygrothemal condition has been considered for this analysis. The natural frequencies and modal loss factors for first mode of such structure are presented in the Table 5. It is observed from the Table 5 that the skewing angle has dominant impact on the stiffness which results in significant increase in the first fundamental frequency of such structure whereas CNT has also improved the natural frequency and modal loss factor with the increase in the CNT volume fraction. The skewing angle increases the stiffness of the structure because of the material concentration in the lesser area which leads to increase in natural frequencies. Higher skewing angle results in higher first natural frequency so, in the present study skewing angle has been taken up to 45°. The first and second mode natural frequencies and modal loss factor of the system is shown in Fig. 5a, b. It is evident from the Fig. 5 that skewing angle has higher impact on natural frequency and modal loss factor of such system. It can be observed from the Fig. 5a that stiffness of such structures can be enhanced by increasing the skewing angle.

Effect of skew angle on a natural frequencies, b modal loss factor of spherical shell under HT case 1
3.3 Effects of CNT and skew angle on the frequency and time responses
The unit impulse load has been applied at the centre node to investigate the damping behaviour of the spherical shell structure with skewing angle of 45° for the HT case 1. The NCs material properties have been used in frequency domain directly to determine the frequency responses and fast Fourier transform (FFT) is employed to obtain the frequency response under HT case 1 thereafter time responses have been obtained from frequency responses using the inverse fast Fourier transform (IFFT). The different CNT volume fractions (such as 0%, 4% and 8%) have been considered for the analysis. From Fig. 6a, b, it can observed that the CNTs have significant effect on the damping properties of the spherical shell structure. Comparatively, the CNTs 8% volume fraction mitigated the vibrations quickly whereas considering the 8% CNTs, the impact of skewing angle on vibration damping of skewed spherical shell is shown in Fig. 6c, d. It is clear from Fig. 6c, d that for higher the skewing angle, the absolute amplitude in frequency and time domain decrease due to enhance of stiffness of such structures.

Various responses of thick NC skewed spherical shell under HT case 1 a frequency responses for different CNT volume fractions, b impulse responses for different CNT volume fractions 1, c frequency responses for different skewed angles, d impulse responses for different skewed angles
3.4 Damping analysis using peaks of time responses
The transient responses are obtained for the skewed shell subjected to an impulse unit load at the centre node (transverse direction) for a duration of 10τ seconds (where τ is the time period corresponding to the first natural frequency of the system), and impulse responses of this panel have been obtained with a time step of τ seconds. Then, the transient response due to the impulse load is obtained by using FFT and IFFT. The transient responses have been obtained for different skewing angles (such as 15°, 30° and 45° under HT case 1) for the said structure and 8% CNT volume fraction is considered. The corresponding peaks of the vibration are obtained for skewed spherical shell structure under the HT case 1 which is shown in Fig. 7a–c. It is observed that vibration can quickly settle for the 8% CNT and 45° skewed angle because of enhance stiffness and damping. The present formulation can be used for thick and thin both type of skewed shells structures. Obtained results of such structures are also presented in the following sub-sections.

Peaks of impulse responses of nanocomposite spherical shell under HT case 1 with skew angles a 15°, b 30°, c 45°
3.5 Effect of CNT on frequency and time responses of thin skewed shells
Effects of CNTs have also been observed for thin (a/h = 100) skewed shell structures under the hygrothermal case 1. The skewing angle 45° is considered for different types of thin shell structures (such as cylindrical, spherical, ellipsoidal and doubly curved) and obtained frequency and time responses of cylindrical and spherical shell structures are depicted in the Fig. 8a–d. Figure 9a–d shows the frequency and time responses of ellipsoidal and doubly curved shell structures. It is clear from the frequency response plots of Figs. 8 and 9, that CNTs may improve natural frequencies significantly. Time histories in Figs. 8 and 9 also indicate that the damping may considerably improve for such thin (a/h = 100) skewed shell structures. From the comparative studies of the different types of thin skewed shell structures (Figs. 8 and 9), it can be found that cylindrical shell is more flexible and doubly curved shell is more stiffed. All such cases vibration reduction are also possible. It is evident that CNT has significant effect on the modal parameters (such as natural frequency and modal loss factor) of such thin skewed spherical shell structures.

Responses of nanocomposite skewed shells under HT case 1 a frequency response of cylindrical shell, b time response of cylindrical shell, c frequency response of spherical shell, d time response of spherical shell

Responses of nanocomposite skewed shells under HT case 1 a frequency response of ellipsoidal shell, b time response of ellipsoidal shell, c frequency response of doubly curved shell, d time response of doubly curved shell
3.6 Hygrothermal effects on the modal parameters of skewed shell structures
In this study, various R/a have been considered for the NC based skewed spherical shell under different hygrothermal cases (1–4). The variations of fundamental frequency and modal loss factor with R/a for the first mode are determined and presented in Figs. 10 and 11. The ratio of R/a of the skewed shell structure is varied from deep to shallow considering a/h = 10 (thick shell) in this analysis and observed that natural frequency is decreasing with the increase in R/a value whereas the modal loss factor is slightly increasing for each hygrothermal case. The skewing angle 45° is considered for this study as the structural stiffness needed to be improved without distorting it. The CNT volume fractions of 0%, 4% and 8% have been considered for all hygrothermal cases which has significant impact on the natural frequency and damping of such shell structure. The natural frequency decreases and modal loss factor increases up-to the range of (0 < R/a > 5) but in the range of (5 < R/a > 1000), no significant changes is observed in the region from shallow shells to plate type structure due to of less influence of the twist curvature. The increase in R/a value increases the gap between curves where natural frequencies are decreased because of less impact of the CNT and this also shows that the deep shell structures are stiffer then the shallow shells/plates as shown in Fig. 10a, c. Effect of hygrothermal conditions gets severe for HT case 2–4, the stiffness of the structure reduces significantly which results in lower natural frequencies and lesser modal loss factors (as shown in Figs. 10 and 11). From Figs. 10 and 11, it can be observed that due to the hygrothermal effects, stiffness of the structures decreases whereas the modal loss factor may improve.

Variations of modal parameters of spherical shell a first natural frequency for HT case 1, b first modal loss factor for HT case 1, c first natural frequency for HT case 2, d first modal loss factor for HT case 2

Variations of modal parameters of spherical shell a first natural frequency for HT case 3, b first modal loss factor for HT case 3, c first natural frequency for HT case 4, d first modal loss factor for HT case 4
3.7 Modal parameters of various shell structures under different hygrothermal conditions
Various thick (a/h = 10) and thin (a/h = 100) skewed shell structures (such as cylindrical, spherical, ellipsoidal, and doubly curved) under different hygrothermal conditions are considered here to study the effects of hygrothermal on the modal parameters of first mode of such structures (as shown in Fig. 12). It can be observed from the Fig. 12 that the stiffness of such thick and thin structures decreases whereas modal loss factor increases due to the effects of hygrothermal. The moisture absorbed at HT case 4 in the polymer phase of NC is more affected which deteriorates the stiffness of such structures. It is also observed from the presented results in the above subsections that CNT and skewing angle may improve the modal parameters (such as natural frequency and modal loss factor) of thick and shell structures.

Variations of modal parameters with HT cases a first natural frequency of different thick shells, b first modal loss factor of different thick shells, c first natural frequency of different thin shells, d first modal loss factor of different thin shells
4 Conclusions
In the presented research work, the hygrothermal dependant viscoelastic properties of NCs are obtained by the proposed combination of numerical and experimental creep methodology from DMA-8000 to study the skewed shell structures' vibration and damping characteristics numerically. The CNT is randomly mixed with 0%, 4% and 8% of volume fraction in the epoxy with the help of an ultrasonic probe sonicator. The ultrasonic sonication for mixing of CNT, is suggested at least for 12 h to have minimum agglomerations followed which the NC samples were prepared for each volume fraction as per the ASTM-D4065 standard with the required dimensional accuracy. Further creep test is conducted to observe the creep behaviour of NC in the time domain in different hygrothermal conditions on DMA-8000. It is observed that in a critical hygrothermal environment, CNT is reducing the creep strain significantly which influences the viscoelastic properties (storage modulus and loss factor) of the NC. The Prony constants were determined using the power law fit from the creep data of NC and, storage modulus and loss factor are obtained using Laplace transform in the frequency domain. The evaluated hygrothermal dependant viscoelastic properties of such NCs material system were further used for different thick (a/h = 10) and thin (a/h = 100) skewed shell structures to determine their vibration and damping characteristics in the different hygrothermal environment. An oblique coordinate system is considered to define the shell geometry with a tangent to the edge for skewing the structure. Increasing in the skewing angle causes a reduction in the surface area which leads to an increase in the material concentration, thereby resulting in an increase in the stiffness of the structure. First order shear deformation theory as per Mindlin’s hypothesis based on the stress resultant-type Koiter’s shell theory is formulated in order to study the vibration and damping behaviour of the said NC-based skewed shell structures. It is observed that the skewing angle has improved the stiffness of the structure which results in higher natural frequencies whereas the CNT content improves the stiffness and damping property of the skewed shell structures (thick and thin both type). The stresses induced due to hygrothermal conditions are incorporated into dynamic analysis by calculating the effective stiffness of such skewed shell structures. The hygrothermal dependant material properties were used for the dynamic study of the skewed shell structure which results in deteriorating the natural frequency and systems loss factor and it is also found that CNT has significantly increased the fundamental frequency and modal loss factor with respect to R/a (i.e., from deep to shallow shells) as the hygrothemral conditions gets severe. Finally, it can be concluded that the stiffness and damping property of such thick and thin skewed shell structures can be improved and controlled by the inclusion of effective volume fraction of CNT in a conventional composite which may be useful in most of the structural applications under hygrothermal environment.
References
Iijima S (1991) Helical microtubules of graphitic carbon. Nature 354(6348):56–58
Rajoria H, Jalili N (2005) Passive vibration damping enhancement using carbon nanotube-epoxy reinforced composites. Compos Sci Tech 65(14):2079–2093
Collings TA, Stone DEW (1985) Hygrothermal effects in CFC laminates: damaging effects of temperature, moisture and thermal spiking. Compos Struct 16:4
Gojny FH, Wichmann MHG, Kopke U (2004) Carbon nanotube-reinforced epoxy-composites—enhanced stiffness and fracture toughness at low nanotube contents. Compos Sci Tech 64(15):2363–2371
David AB (2004) Moisture diffusion in a fiber-reinforced composite: Part I – Non-Fickian transport and the effect of fiber spatial distribution. J Compos Mater 39, 23/2005
Lee CY, Pfeifer M, Thompson BS (1989) The characterization of elastic moduli and damping capacities of Graphite/Epoxy composite laminated beams in hygrothermal environments. J Compos Mater 23:819
Zhang YC, Wang X (2006) Hygrothermal effects on interfacial stress transfer characteristics of carbon nanotubes-reinforced composite system. J Reinf Plastic Compos 25, 1/2006
Nanda N, Pradyumna S (2011) Nonlinear dynamic response of laminated shells with imperfections in hygrothermal environments. J Compos Mater 45(20):2103–2112
Jia Y, Peng K, Gong X (2011) Creep and recovery of polypropylene/carbon nanotube composites. Int J Plastic 27(8):1239–1251
Tehrani M, Safdari M, Al-Haik MS (2011) Nano characterization of creep behaviour of multiwall carbon nanotubes/epoxy nanocomposite. Int J Plastic 27(6):887–901
Saseendran S, Berglund D, Varna J (2019) Stress relaxation and strain recovery phenomena during curing and thermomechanical loading: thermorheologically simple viscoelastic analysis. J Compos Mater 53(26–27):3841–3859
Jen YM, Huang C-Y (2013) Combined temperature and moisture effect on the strength of carbon nanotube reinforced epoxy materials. Trans Can Soc Mech Eng 37–3
Yizhuo G, Hongxin LML, Yanxia L (2014) Macro- and micro-interfacial properties of carbon fiber reinforced epoxy resin composite under hygrothermal treatments. J Reinf Plastic Compos 33(4):369–379
Garg M, Sharma S, Mehta R (2016) Carbon nanotube-reinforced glass fiber epoxy composite laminates exposed to hygrothermal conditioning. J Mater Sci 51:8562–8578
Burgarella B, Maurel-Pantel A, Moulinec H (2018) Effective viscoelastic behaviour of short fibers composites using virtual DMA experiments. Mech Time-Dep Mater 01806389
Hagenbeek M, Dias MM, Sinke J, Jansen K (2019) Creep behaviour of FM906 glass-fibre epoxy as used in heated fibre metal laminates. J Compos Mater 53(26–27):3829–3840
Khan SU, Li CY (2011) Siddiqui NA and Kim JK Vibration damping characteristics of carbon fiber-reinforced composites containing multi-walled carbon nanotubes. Compos Sci Technol 71(12):1486–1494. https://doi.org/10.1016/j.compscitech.2011.03.022
Patnaik SS, Roy T, Rao DK (2020) Numerical investigation of vibration characteristics and damping properties of CNT-based viscoelastic spherical shell structure. © Springer Nature Switzerland AG (2020) S. Oberst et al. (eds.), Vibration Engineering for a Sustainable Future, https://doi.org/10.1007/978-3-030-47618-2_29.
Patnaik SS, Swain A, Roy T (2020) Creep compliance and micromechanics of multi-walled carbon nanotubes based hybrid composites. Compos Mater Eng 2(2):141–162. https://doi.org/10.12989/cme.2020.2.2.141
Swain A, Roy T (2018) Viscoelastic modeling and vibration damping characteristics of hybrid CNTs-CFRP composite shell structures. Acta Mech 229:1321–1352. https://doi.org/10.1007/s00707-017-2051-9
Kiani Y (2017) Analysis of FG-CNT reinforced composite conical panel subjected to moving load using Ritz method. Thin-Walled Struct. https://doi.org/10.1016/j.tws.2017.05.031
Kiani Y (2017) Dynamics of FG-CNT reinforced composite cylindrical panel subjected to moving load. Thin-Walled Struct 111:48–57. https://doi.org/10.1016/j.tws.2016.11.011
Mahapatra TR (2016) Large amplitude vibration analysis of laminated composite spherical panels under hygrothermal environment. Int J Struct Stab Dyn. https://doi.org/10.1142/S0219455414501053
Kandasamy S, Singh AV (2006) Free vibration analysis of skewed open circular cylindrical shells. J Sound Vib. https://doi.org/10.1016/j.jsv.2005.05.010
Shojaee M, Setoodeh AR, Malekzadeh P (2017) Vibration of functionally graded CNTs reinforced skewed cylindrical panels using a transformed differential quadrature method. Acta Mech 228:2691–2711. https://doi.org/10.1007/s00707-017-1846-z
Biswal M, Sahu SK, Asha AV, Nanda M (2016) Hygrothermal effects on buckling of composite shell-experimental and FEM results. Steel Compos Struct 22(6):1445–1463. https://doi.org/10.12989/scs.2016.22.6.1445
Ebrahimi F, Dabbagh A (2019) An analytical solution for static stability of multi-scale hybrid nanocomposite plates. Eng Comput. https://doi.org/10.1007/s00366-019-00840-y
Ebrahimi F, Dabbagh A (2020) Vibration analysis of fluid-conveying multi-scale hybrid nanocomposite shells with respect to agglomeration of nanofillers. Def Technol. https://doi.org/10.1016/j.dt.2020.01.007
Roy T, Manikandan P, Chakraborty D (2010) Improved shell finite element for piezothermoelastic analysis of smart fiber reinforced composite structures. Finite Elements Anal Design. https://doi.org/10.1016/j.finel.2010.03.009
Sangtarash H, Arab HG, Sohrabi MR, Ghasemi MR (2019) Formulation and evaluation of a new four-node quadrilateral element for analysis of the shell structures. Eng Comput. https://doi.org/10.1007/s00366-019-00763-8
Mallek H, Jrad H, Wali M, Dammak F (2019) Nonlinear dynamic analysis of piezoelectric-bonded FG-CNTR composite structures using an improved FSDT theory. Eng Comput. https://doi.org/10.1007/s00366-019-00891-1
Sinha PK, Naidu NVS (2007) Nonlinear free vibration analysis of laminated composite shells in hygrothermal environments. Compos Struct 77(4):475–483
Biswal M, Sahu SK, Asha AV (2015) Experimental and numerical studies on free vibration of laminated composite shallow shells in hygrothermal environment. Compos Struct 127:165–174
Biswal M, Sahu SK, Asha AV (2016) Vibration of composite cylindrical shallow shells subjected to hygrothermal loading-experimental and numerical results. Compos Part B Eng 98:108–119
Karimiasl M, Ebrahimi F, Mahesh V (2019) Nonlinear free and forced vibration analysis of multiscale composite doubly curved shell embedded in shape-memory alloy fiber under hygrothermal environment. J Vib Control. https://doi.org/10.1177/1077546319842426
Tsai YI, Bosze EJ, Barjasteh E, Nutt SR (2009) Influence of hygrothermal environment on thermal and mechanical properties of carbon fiber/fiberglass hybrid composites. Compos Sci Technol 69(3–4):432–437
Kundalwal SI, Rathi A (2020) Improved mechanical and viscoelastic properties of CNT-composites fabricated using an innovative ultrasonic dual mixing technique. J Mech Behav Mater 29:77–85. https://doi.org/10.1515/jmbm-2020-0008
Kundalwal SI (2018) Review on micromechanics of nano- and micro-fiber reinforced composites. Polym Compos 39:4243–4274. https://doi.org/10.1002/pc.24569
Kundalwal SI, Suresh KR, Ray MC (2013) Smart damping of laminated fuzzy fiber reinforced composite shells using 1–3 piezoelectric composites. Smart Mater Struct. https://doi.org/10.1088/0964-1726/22/10/105001
Kundalwal SI, Ray MC (2016) Smart damping of fuzzy fiber reinforced composite plates using 1–3 piezoelectric composites. J Vib Control 22:1526–1546. https://doi.org/10.1177/1077546314543726
Ram KSS, Sinha PK (1992) Hygrothermal effects on the free vibration of laminated composite plates. J Sound Vib. https://doi.org/10.1016/0022-460X(92)90669-O
Cura F, Mura A, Scarpa F (2012) Modal strain energy based methods for the analysis of complex patterned free layer damped plates. J Vib Control 18:1291–1302. https://doi.org/10.1177/1077546311417277
Madeira JFA, Araújo AL, Soares CMM, Soares CAM, Ferreira AJM (2015) Multiobjective design of viscoelastic laminated composite sandwich panels. Compos B Eng 77:391–401. https://doi.org/10.1016/j.compositesb.2015.03.025
Rouleau L, Deü J-F, Legay A (2017) A comparison of model reduction techniques based on modal projection for structures with frequency-dependent damping. Mech Syst Signal Process 90:110–125. https://doi.org/10.1016/j.ymssp.2016.12.013
Barkanov E (1999) Transient response analysis of structures made from viscoelastic materials. Int J Num Methods Eng 44:393–403. https://doi.org/10.1002/(SICI)1097-0207(19990130)44:3%3c393,AID-NME511%3e3.0.CO;2-P
Sk L, Sinha PK (2005) Improved finite element analysis of multilayered doubly curved composite shells. J Reinf Plastics Compos. https://doi.org/10.1177/0731684405044899
Jarali CS, Patil SF, Pilli SC (2015) Hygro-thermo-electric properties of carbon nanotube epoxy nanocomposites with agglomeration effects. Mech Adv Mater Struct 22(6):428–439. https://doi.org/10.1080/15376494.2013.769654
Acknowledgements
The authors kindly acknowledged the IMPRINT cell of the Ministry of human resource development (MHRD) and the Department of science and technology (DST), Government of India, for a project grant (F. No. IMPRINT-6292) under which the research work was carried out.
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The author(s) declare that there are no potential conflicts of interest with respect to the research, authorship and/or publication of this article.
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Appendix
Appendix
Shape functions (\({N}_{i}\)) used for the shell element are mentioned below:
Strain–displacement relation based on the Koiter shell theory
where, \(C_{0}=\frac{1}{2}\left(\frac{1}{R_1}-\frac{1}{R_2}\right)\).
The \(\rho\) matrix (symmetric) for the Eq. 53 is mentioned as:
The coefficient of thermal expansion and coefficient of moisture expansion terms for the Eq. 45 are mentioned as:
Rights and permissions
About this article

Cite this article
Patnaik, S.S., Roy, T. Vibration and damping characteristics of CNTR viscoelastic skewed shell structures under the influence of hygrothermal conditions. Engineering with Computers 38, 3773–3792 (2022). https://doi.org/10.1007/s00366-021-01411-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00366-021-01411-w