
Abstract
We present a new numerical method for solving fractional delay differential equations. The method is based on Taylor wavelets. We establish an exact formula to determine the Riemann–Liouville fractional integral of the Taylor wavelets. The exact formula is then applied to reduce the problem of solving a fractional delay differential equation to the problem of solving a system of algebraic equations. Several numerical examples are presented to show the applicability and the effectiveness of this method.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Fractional differential equations (FDEs) have a long history. It can be traced back to the works of L’Hopital since 1695 when he raised a question to Leibniz about derivative of order \(\frac{1}{2}\). In the last two decades, FDEs have drawn increasing attention due to their important applications in various fields of mathematics, sciences and engineering, such as electrochemistry [1], economic [2], mechanic [3, 4], medicine [5], signal processing [6], traffic model [7], and informatics [8].
Delay differential equation is a special kind of differential equation in which the derivative of the unknown function at a certain time is given in terms of not only the value of the unknown function at the same time, but also the values of the unknown function at previous times. Delay differential equations are introduced during various mathematical modelling of processes in engineering and sciences, such as economy, biology, medicine, chemistry, control, and electrodynamic (see for instance, [9, 10] and references therein). In general, the solution of some delay differential equations cannot be expressed in terms of elementary functions. Therefore, it is necessary to develop numerical methods to approximate the solution of these equations. Variety of numerical solution methods have been proposed, for instance, Adomian decomposition method [11], One-leg \(\theta \)-method [12], variational method [13], Legendre wavelet method [14], Chebyshev polynomials [15], and Bernoulli operational matrices [16].
Fractional delay differential equation is a natural generalization of delay differential equations of integer orders. However, there were not many works devoted to numerical methods for solving such kinds of differential equations. Some available numerical methods for solving fractional delay differential equations are based on finite difference method [17], Legendre pseudo-spectral functions [18], spectral collocation method [19], Hermit wavelet functions [20], Bernoulli wavelet functions [21], and linear interpolation method [22].
In recent years, wavelet theory has received considerable attention because of its powerful applications in several fields such as system analysis, numerical analysis, and optimal control [23]. Wavelets have several specific properties that make them useful [24]. In general, for solving fractional calculus using wavelets, the following equation has been used:
where \(I^{\alpha }\) is the Riemann–Liouville fractional integral of order \(\alpha \) for different wavelets and \(P^{\alpha }\) the operational matrix for Riemann–Liouville integration (OMRLI). The elements of \(\Psi (t)\) are the basis functions. Typical examples are the applications of Chebyshev, Legendre, Cosine and Sine (CAS), or Haar wavelets [25,26,27,28]. For obtaining \(P^{\alpha }\), these wavelets were first expanded into block-pulse functions, then the OMRLI of block-pulse functions was used for calculating \(P^{\alpha }\). In addition, for obtaining \(P^{\alpha }\), using Bernoulli wavelets in [29], the Bernoulli wavelets were first expanded into Bernoulli polynomials, then the OMRLI of Bernoulli polynomials was used for calculating \(P^{\alpha }\) for Bernoulli wavelets. It is noted that none of these wavelets calculated \(P^{\alpha }\) directly, and some approximations were involved for calculating \(I^{\alpha }\Psi (t)\).
A fractional delay differential equation can be stated as follows:
where y is an unknown function; f and \(\phi \) are known analytic functions; \(\alpha , \tau \), and the initial values \(\lambda _i\) are given; \(\lceil \alpha \rceil \) is the smallest integer larger than or equal to \(\alpha \). In this paper, we introduce a new numerical method for solving fractional delay differential equations in Eq. (1). The method is based on the use of Taylor wavelets. We present the exact formula for determining the fractional integral of the Taylor wavelets. The exact formula will be then applied to solve the delay differential equation in Eq. (1). This formula allows us to reduce the given delay differential equation to a system of algebraic equations, which can be solved by the Newton iteration method.
The paper is organized as follows: Basic definitions and notations from Fractional Calculus are introduced in Sect. 2. Section 3 is devoted to Taylor wavelets and their properties. In Sect. 4, we establish the exact formula for determining the fractional integral of the Taylor wavelets defined in the previous section. A numerical method for solving the fractional delay differential equation based on Taylor wavelets is presented in Sect. 5 and error estimations are given in Sect. 6. Several examples are presented in Sect. 7 to show the applicability and the effectiveness of our method.
2 Fractional-order integrals and derivatives
In this section, we recall some definitions and basis properties of fractional-order integrals and derivatives.
Definition 2.1
(see [30]) The Riemann–Liouville fractional integral of order \(\alpha \ge 0\) of a function f(x) over \([0,+\infty )\) is a function over \([0,+\infty )\) defined as
where \(x^{\alpha -1} * f(x)\) is the convolution product of \(x^{\alpha -1}\) and f(x).
Definition 2.2
(see [31]) The Caputo fractional derivative of order \(\alpha \ge 0\) of a function f(x) over \([0,+\infty )\) is a function over \([0,+\infty )\) defined as
where \(n = \lceil \alpha \rceil \).
Fractional-order integrals and derivatives satisfy the following properties:
Proposition 2.3
For \(\alpha \ge 0\), the following hold:
-
1.
\(I^{\alpha }\) and \(D^{\alpha }\) are linear operators, i.e., \(I^{\alpha }(\lambda f+\mu g)= \lambda I^{\alpha }f + \mu I^{\alpha }g\) and \(D^{\alpha }(\lambda f+\mu g)= \lambda D^{\alpha }f + \mu D^{\alpha }g\) for every functions \(f,\,g\) and numbers \(\lambda ,\,\mu \).
-
2.
\(D^{\alpha }I^{\alpha }f(x)=f(x)\).
-
3.
\(I^{\alpha }D^{\alpha }f(x)=f(x)-\sum \limits _{j=0}^{\lceil \alpha \rceil } \frac{f^{(j)}(0)}{j!} x^j\).
-
4.
\(I^{\alpha }x^{j}=\frac{\Gamma (j+1)}{\Gamma (j+\alpha +1)} x^{j+\alpha }\) for \(j>-1\).
-
5.
\(D^{\alpha }x^{j}=\frac{\Gamma (j+1)}{\Gamma (j-\alpha +1)}x^{j-\alpha }\) for \(j>\alpha -1\).
3 Taylor wavelets
3.1 Wavelets and Taylor wavelets
Wavelets are a family of functions constructed from dilation and translation of a single function called the mother wavelet. When the dilation parameter a and the translation parameter b vary continuously, we have the following family of continuous wavelets [23]:
If we restrict the parameters a and b to discrete values as \(a = a_0^k\), and \(b = nb_0a_0^k\), where \(a_0> 1,~ b_0 > 0\), and n and k are positive integers, we obtain the family of discrete wavelets as:
which form a wavelet basis for \(L^{2}(\mathbb {R})\).
Definition 3.1
(See [32]) Let k be a positive integer. For each \(n=1,\ldots ,2^{k-1}\) and \(m \in \mathbb {N}\), the Taylor wavelet function, say \(\psi _{n,m}\), is defined over [0, 1) by
where
is the normal Taylor polynomial of degree m.
The six Taylor wavelets corresponding to \(k=2\) with the order \(m <3\) are the following:
The following properties of the Taylor wavelets can be verified by a direct calculation:
Proposition 3.2
Let \(k,n_1,n_2,m_1,\ {\rm and} \ m_2\) be positive integers such that \(1 \le n_1,n_2 \le 2^{k-1}\). Then,
3.2 Function approximation
Recall that a set \(S \subset L^2[0,1]\) is called a complete set if the linear vector space generated by S is dense in \(L^2[0,1]\). For each \(k \in \mathbb {N}\), since the space of polynomials is dense in \(L^2[0,1]\), the set
forms a complete set. Therefore, a function f in \(L^2[0,1]\) can always be expanded as
for some sequence of real numbers \(\{c_{n,m}\}_{n,m}\).
For each positive numbers k and M, we set
In the next section, we find a function in the linear vector space \(\text {span}({\mathcal {O}}_{k,M})\) which is the best approximation to a solution of a given fractional delay differential equation. The space \(\text {span}({\mathcal {O}}_{k,M})\) is a closed finite-dimensional subspace of \(L^2[0,1]\). By the Hilbert Projection Theorem (see [33, Thm. 2, p. 51]), there exists a unique function in \(\text {span}({\mathcal {O}}_{k,M})\) minimizing the distance to f. The function is obtained by truncating the series in Eq. (4) up to order \(M{-}1\), i.e.,
where
and
4 Riemann–Liouville fractional integral for Taylor wavelets
An exact formula for the fractional-order integral of Taylor wavelets is presented in the following theorem:
Theorem 4.1
The integral of order \(\alpha >0\) of the function \(\psi _{n,m}\) is given by
where
and
Proof
To obtain \(I^{\alpha }\psi _{n,m}\), we use the Laplace transform. Using the unit step function defined as
we can rewrite the Taylor wavelet \(\psi _{n,m}(x)\) as follows:
By taking the Laplace transform of \(I_1\) and using
we get
By substituting Eq. (3) to the right-hand side of the above equation, we obtain
Since \(\mathscr {L}\{x^m\} = \frac{\Gamma (m+1)}{s^{m+1}}\), we have
Similarly, we also have
Using Eq. (2), we have
It is well-known that \(\mathscr {L}\{f(x) * g(x)\}= \mathscr {L}\{f(x)\} \cdot \mathscr {L}\{g(x)\}\). Therefore,
By taking the inverse Laplace transformation, we get
The theorem then follows. \(\square \)
5 Numerical solutions of fractional delay differential equations
In this section, we present a new numerical method for solving the fractional delay differential equation given in Eq. (1).
We fix a positive integer k. The function \(D^{\alpha }y(x)\) can be expanded over [0, 1) as
where C and \(\Psi _{k,M}\) are given in Eqs. (5) and (6), respectively. By applying the integral operator \(I^{\alpha }\) to both sides of Eq. (8) and using item 3 in Proposition 2.3 with \(y^{(j)}(0)=\lambda _j\) for \(j=0,\ldots ,\lceil \alpha \rceil \), we obtain
Therefore,
By substituting Eqs. (8), (9) and (10) to the given fractional delay differential equation in Eq. (1) and using Eq. (7), we obtain an algebraic equation. We collocate this algebraic equation at the following \(2^{k-1}M\) Newton–Cotes nodes
we then obtain a system of \(2^{k-1}M\) algebraic equations in the \(2^{k-1}M\) unknown constants \(c_{n,m}\). The last system can be solved using Newton’s iteration method. The initial guess for Newton’s iterative method can be obtained similarly to the method given in [34] as follows. To choose the initial guesses, in the first stage, we set \(k = 1\) and \(M = 1\) and then apply Newton’s iterative method for solving the given system of equations. In this stage, we obtain an approximation to our problem. Next, we increase the value of M until a satisfactory convergence is achieved. We then set \(k = 2\) and use the approximate solution in the first stage as our initial guess in this stage. We continue this approach until the results are similar up to a required number of decimal places for the same k and two consecutive M values.
6 Error estimation
In this section, we estimate the error bound for the best approximation based on Taylor wavelets.
Theorem 6.1
Let \(f \in L^2[0,1]\) such that f is M times differentiable. Let \(C^T \Psi _{k,M}\) be the best approximation of f in \({\mathcal {O}}_{k,M}\). Then,
where \(N=\max \limits _{\xi \in [0,1]} \left|\, f^{(M)}(\xi )\right| \).
Proof
We divide the closed interval [0, 1] into \(2^{k-1}\) subintervals \(I_{n} =\left[ \frac{n-1}{2^{k-1}},\frac{n}{2^{k-1}}\right] \) with \(n=1,\ldots ,2^{k-1}\). By the definition of Taylor wavelets, for every \(n=1,\ldots ,2^{k-1}\), the function \(C^T\Psi _{k,M}\) is also the best approximation of f over the interval \(I_n\). We denote \(P_{n,M-1}(x)\) to be the interpolating polynomial of f at the Chebyshev nodes in the interval \(I_{n}\). Due to [35, Chp. 20], the interpolation error is
Let \(P_{M-1}\) be the function defined over [0, 1) such that \(P_{M-1}(x)=P_{n,M-1}(x)\) for every \(x \in \left[ \frac{n-1}{2^{k-1}}, \frac{n}{2^{k-1}} \right) \), \(n=1,\ldots ,2^{k-1}\). Then,
Since \(C^T\Psi _{k,M}\) is the best approximation of f in \({\mathcal {O}}_{k,M}\) and that \(P_{M-1} \in {\mathcal {O}}_{k,M}\), we conclude from Eq. (12) that
\(\square \)
Theorem 6.2
Let \(f \in L^2[0,1]\) such that f is M times differentiable. Let \(C^T \Psi _{k,M}\) be the best approximation of f in \({\mathcal {O}}_{k,M}\). Then,
where \(N=\max \limits _{\xi \in [0,1]} \left| f^{(M)}(\xi )\right| \).
Proof
Using Eq. (2) and Hölder’s inequality, we can estimate the difference between \(I^{\alpha }f\) and \(I^{\alpha }C^T\Psi \) at \(x \in [0,1]\) as follows:
Finally, we apply Eq. (11) and obtain
\(\square \)
7 Illustrative examples
In this section, we compare the efficiency of our method with that of some previously known ones.
Example 7.1
Consider the following fractional delay differential equation (see [21, Example 1]):
where \(x \in [0,1]\), \(\alpha \in (0,1]\) and \(y(x)=x^2-x\) if \(x \le 0\).
We choose \(k=2\) and \(M=3\) and approximate \(D^{\alpha }y(x)\) as
where \(C=\left[ c_{1,0},c_{1,1},c_{1,2},c_{2,0},c_{2,1},c_{2,2}\right] ^T\) is the vector of unknown constants that we need to determine. Then, we have
and
In the above formulas, \(I^{\alpha }\Psi _{2,2}\) are determined explicitly by Theorem 4.1. By substituting Eqs. (14) and (15) to Eq. (13), we obtain an algebraic equation. By collocating the algebraic equation at Newton–Cotes nodes
we get a linear system in the \(c_{n,m}\)’s.
In case there is no delay, i.e. \(\tau =0\), the linear system becomes
This system admits the unique solution:
By substituting this solution to Eq. (14), we obtain \(y(x)=x^2-x\), which is the exact solution of the given delay differential equation. It is noted that the exact solution was not obtained in [21].
In case there is delay, we obtain approximations of the solutions depending on \(\alpha \) and \(\tau \). In Table 1, we demonstrate the absolute errors for our method by selecting \(k=2\) and \(M=3\) or with the number of bases \({\hat{m}}=2^{k-1}M=6\); by the Bernoulli wavelet method in [21] by selecting \(k=2\) and \(M_1=3\) or with the same number of bases. The values in Table 1 suggest that numerical solutions produced from our method have less absolute errors than numerical solutions from the Bernoulli wavelet method in [21]. In Table 1, \(M_1\) is the degree of Bernoulli polynomials. Figure 1 shows the graphs of the exact solution and our approximate solution when \(\alpha =1\) and the delay \(\tau =0.01\).

The left-hand side is the graph of the exact solution (line) and the approximation solution (dashed) for Example 7.1 from our method when \(k=2,M=3\), \(\alpha =1,\) and \(\tau =0.01\). The right-hand side is the graph of the absolute error function
Example 7.2
Consider the following fractional-order delay differential equation (see [21, Example 2]):
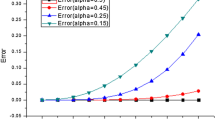
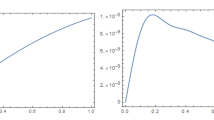
This problem admits the exact solution \(y(x)=e^{-x}\) when \(\alpha =3\). In Table 2, we show some values of the exact solution and the numerical solutions obtained by applying our method by choosing \(k=2,M=7\) or with the number of bases \({\hat{m}}=14\); by Bernoulli wavelet method in [21] by selecting \(k=2,M_1=7\) or with the same number of bases; by Hermit wavelet method in [36] by selecting \(k=1,M_2=25\) or with the number of bases \({\hat{m}}=2^{k-1}M_2=25\). In this table, \(M_2\) is the degree of the Hermit polynomials. Figure 2 represents the graph of the absolute error function of the numerical solution obtained from our method when \(\alpha =3, \, k=2,\) and \(M=7.\) In addition, Fig. 3 shows the graphs of the exact solution and the numerical solutions for different order \(\alpha \). The graphical detail of Fig. 3 suggests that the numerical solutions approach the exact solution when the order \(\alpha \) tends to 3.

The left-hand side is the graph of the exact solution (line) and the numerical solution (dashed) for Example 7.2 from our method. The right-hand side is the graph of the absolute error function. Here, we choose \(k=2,\,M=7,\) and \(\alpha =3\)

The graphs of the exact solutions and the numerical solutions for Example 7.2 when \(k=2,\, M=4,\) and \(\alpha =2.7,\,2.8,\,2.9\)
Example 7.3
Consider the following fractional-order delay differential equation (see [37, Example 6]):
where \(\alpha \in (0,1]\) and the function u(x) is defined by
In case \(\alpha =1\), this problem admits the exact solution
To apply our method, we make a transformation of unknown functions \(g(x)=y(2x)\), and set \(t=\frac{x}{2}\) with \(t \in (0,1]\). We then have
and
By substituting Eqs. (17)–(19) to (16), the given differential equation is transformed to the following equivalent one:
where \(\alpha \in (0,1]\). In case \(\alpha =1\), by applying our method, we obtain the exact solution.
In case \(\alpha \ne 1\), the exact solution is not known. In this case, to show the efficiency of the present method, we consider the residual error
In Table 3, we compare the residual errors of numerical solutions obtained from our method and Legendre multiwavelet collocation method in [37] with \(\alpha =0.95\). For computing the numerical solution by applying our method, we select \(k=2\) with \(M=7\) or with the number of bases \({\hat{m}}=14\) and by selecting \(k=2\) with \(M=10\) or with the number of bases \({\hat{m}}=20\); together with the Legendre multiwavelet collocation method in [37] using \(k=2\) with \(M_3=7\) and \(k=2\) with \(M_3=10\) (hence with the same number of bases). In this table, \(M_3\) stand for the degrees of the Legendre wavelets. The left-hand side of Fig. 4 demonstrates the graph of the exact solution with \(\alpha =1\) and the numerical solution from our method with \(k=2\) and \(M=3\), while the right-hand side is the graph of the absolute error function. Figure 5 represents the graphs of different numerical solutions with different values of \(\alpha \) with \(k=2\) and \(M=3\). From Fig. 5, we see that as \(\alpha \) approaches to 1, the numerical solutions approach to the exact solution of the given differential equation with the integer order.

The graphs on the left-hand side are of the numerical solution for Example 7.3 obtained from our computation (dashed) and the exact solution when \(k=2\) and \(M=3\). The graph of the absolute error is showed on the right-hand side

The graphs of the numerical solutions for Example 7.3 obtained from our computation for \(k=2\) and \(M=3\) and different values of \(\alpha \)
8 Conclusion
In this paper, we propose an exact formula for the Riemann–Liouville fractional integral of a Taylor wavelet. A new numerical method for delay fractional differential equations is presented. Using the exact formula and collocation method, we reduce the problem of computing a numerical solution of a delay fractional differential equation to the problem of solving an algebraic system. Several examples are demonstrated to show the applicability and the efficiency of the present method.
References
Oldham KB (2010) Fractional differential equations in electrochemistry. Adv Eng Softw 41(1):9–12
Baillie RT (1996) Long memory processes and fractional integration in econometrics. J Econom 73(1):5–59
Carpinteri A, Mainardi F (eds) (2014) Fractals and fractional calculus in continuum mechanics. Springer, Berlin
Rossikhin YA, Shitikova MV (1997) Applications of fractional calculus to dynamic problems of linear and nonlinear hereditary mechanics of solids. Appl Mech Rev 50(1):15–67
Hall MG, Barrick TR (2008) From diffusion-weighted MRI to anomalous diffusion imaging. Magn Reson Med 59(3):447–455
Povstenko Y (2010) Signaling problem for time-fractional diffusion-wave equation in a half-space in the case of angular symmetry. Nonlinear Dyn 59(4):593–605
He JH (1999) Some applications of nonlinear fractional differential equations and their approximations. Bull Sci Technol 15(2):86–90
Mandelbrot B (1967) Some noises with I/f spectrum, a bridge between direct current and white noise. IEEE Trans Inf Theory 13(2):289–298
Ockendon JR, Tayler AB (1971) The dynamics of a current collection system for an electric locomotive. Proc R Soc Lond A Math Phys Sci 322(1551):447–468
Aiello WG, Freedman HI, Wu J (1992) Analysis of a model representing stage-structured population growth with state-dependent time delay. SIAM J Appl Math 52(3):855–869
Evans DJ, Raslan KR (2005) The Adomian decomposition method for solving delay differential equation. Int J Comput Math 82(1):49–54
Wang WS, Li SF (2007) On the one-leg \(\theta \)-methods for solving nonlinear neutral functional differential equations. Appl Math Comput 193(1):285–301
Yu ZH (2008) Variational iteration method for solving the multi-pantograph delay equation. Phys Lett A 372(43):6475–6479
Hafshejani MS, Vanani SK, Hafshejani JS (2011) Numerical solution of delay differential equations using Legendre wavelet method. World Appl Sci J 13:27–33
Sedaghat S, Ordokhani Y, Dehghan M (2012) Numerical solution of the delay differential equations of pantograph type via Chebyshev polynomials. Commun Nonlinear Sci Numer Simul 17(12):4815–4830
Tohidi E, Bhrawy AH, Erfani K (2013) A collocation method based on Bernoulli operational matrix for numerical solution of generalized pantograph equation. Appl Math Model 37(6):4283–4294
Moghaddam BP, Mostaghim ZS (2013) A numerical method based on finite difference for solving fractional delay differential equations. J Taibah Univ Sci 7(3):120–127
Khader MM, Hendy AS (2012) The approximate and exact solutions of the fractional-order delay differential equations using Legendre seudospectral method. Int J Pure Appl Math 74(3):287–297
Yang Y, Huang Y (2013) Spectral-collocation methods for fractional pantograph delay-integrodifferential equations. Adv Math Phys
Saeed U (2014) Hermite wavelet method for fractional delay differential equations. J Differ Equ Appl
Rahimkhani P, Ordokhani Y, Babolian E (2017) A new operational matrix based on Bernoulli wavelets for solving fractional delay differential equations. Numer Algorithms 74(1):223–245
Wang Z (2013) A numerical method for delayed fractional-order differential equations. J Appl Math
Razzaghi M, Yousefi S (2001) The Legendre wavelets operational matrix of integration. Int J Syst Sci 32(4):495–502
Beylkin G, Coifman R, Rokhlin V (1991) Fast wavelet transforms and numerical algorithms I. Commun Pure Appl Math 44(2):141–183
Zhu L, Fan Q (2012) Solving fractional nonlinear Fredholm integro-differential equations by the second kind Chebyshev wavelet. Commun Nonlinear Sci Numer Simul 17(6):2333–2341
Heydari MH, Hooshmandasl MR, Mohammadi F (2014) Legendre wavelets method for solving fractional partial differential equations with Dirichlet boundary conditions. Appl Math Comput 234:267–276
Saeedi H, Moghadam MM, Mollahasani N, Chuev GN (2011) A CAS wavelet method for solving nonlinear Fredholm integro-differential equations of fractional order. Commun Nonlinear Sci Numer Simul 16(3):1154–1163
Li Y, Zhao W (2010) Haar wavelet operational matrix of fractional order integration and its applications in solving the fractional order differential equations. Appl Math Comput 216(8):2276–2285
Keshavarz E, Ordokhani Y, Razzaghi M (2014) Bernoulli wavelet operational matrix of fractional order integration and its applications in solving the fractional order differential equations. Appl Math Model 38(24):6038–6051
Miller KS, Ross B (1993) An introduction to the fractional calculus and fractional differential equations. Willey, New York
Caputo M (1967) Linear models of dissipation whose Q is almost frequency independent-II. Geophys J Int 13(5):529–539
Keshavarz E, Ordokhani Y, Razzaghi M (2018) The Taylor wavelets method for solving the initial and boundary value problems of Bratu-type equations. Appl Numer Math 128:205–216
Luenberger DG (1997) Optimization by vector space methods. Wiley, Hoboken
Yuttanan B, Razzaghi M (2019) Legendre wavelets approach for numerical solutions of distributed order fractional differential equations. Appl Math Model 70:350–364
Stewart GW (1993) Afternotes on numerical analysis. University of Maryland at College Park
Saeed U, Rehman M (2014) Hermite wavelet method for fractional delay differential equations. J Differ Equ Appl
Yousefi S, Lotfi A (2013) Legendre multiwavelet collocation method for solving the linear fractional time delay systems. Cent Eur J Phys 11(10):1463–1469
Acknowledgements
The authors wish to express their sincere thanks to anonymous referees for their valuable suggestions that improved the final manuscript.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher's Note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Toan, P.T., Vo, T.N. & Razzaghi, M. Taylor wavelet method for fractional delay differential equations. Engineering with Computers 37, 231–240 (2021). https://doi.org/10.1007/s00366-019-00818-w
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00366-019-00818-w