
Abstract
The present paper characterizes the attachment ability of males and females of Nezara viridula (Heteroptera: Pentatomidae) on artificial surfaces (smooth hydrophilic, smooth hydrophobic, different surface roughness) and on both leaf surfaces of the typical host plant species Vicia faba, using a centrifugal force tester and a traction force experiments set up. N. viridula is a serious crop pest in the world and shows attachment devices different from the so far investigated Heteroptera, with a tarsus characterized by distal smooth flexible pulvilli combined with claws and proximal ventral hairy pad. Notwithstanding the different body mass between the sexes, no difference was found between friction forces generated by females and males. Friction force was higher on hydrophilic surfaces than on hydrophobic ones and was lower on both sides of V. faba leaf compared with both hydrophilic and hydrophobic artificial smooth surfaces. On the surfaces with different roughness, the friction force values varied significantly, with the higher attachment ability on the surface with very high asperity size followed by the smooth surface. The lowest attachment was on the surfaces with intermediate asperity sizes. These results could be related to the specific combination of attachment devices of N. viridula.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
The attachment ability to various plant substrates is a crucial factor for the evolutionary success of insects (Southwood 1986). To achieve sufficient attachment for locomotion on widely diverse plant surfaces, insects evolved various types of leg attachment devices (Gorb 2001). Claws are adapted to interlock with rough surfaces (Nachtigall 1974; Betz 2002; Voigt et al. 2007), when the distances between adjacent asperities as well as their heights are larger than the claw tip diameter (Dai et al. 2002). On smooth surfaces, insects attach themselves using their tarsal adhesive devices, such as hairy pads (for example, flies, beetles, earwigs), or smooth flexible pads called arolia, pulvilli and euplantulae (for example, cockroaches, ants, aphids, grasshoppers, bugs, butterflies, moths) (Beutel and Gorb 2001, 2006; Gorb 2001). Both types of insect adhesive pads are flexible areas of the cuticle supplemented with cuticular secretions (Dirks and Federle 2011).
To date, several studies have been carried out to characterize the attachment ability of different insect taxa including Blattodea (Roth and Willis 1952; Arnold 1974), Coleoptera (Stork 1980; Ishii 1987; Gorb and Gorb 2002; Voigt et al. 2008), Diptera (Walker et al. 1985; Gorb et al. 2001), Hymenoptera (Brainerd 1994; Federle et al. 2000, 2001, 2002; Frantsevich and Gorb 2002, 2004; Federle and Endlein 2004; Endlein and Federle 2008), Orthoptera (Gorb et al. 2000; Gorb and Scherge 2000; Jiao et al. 2000), Thysanoptera (Heming 1972), Homoptera (Lees and Hardie 1988; Dixon et al. 1990; Frantsevich et al. 2008) and Heteroptera (Gorb and Gorb 2004; Gorb et al. 2004; Voigt et al. 2007). In the last suborder, the knowledge about attachment devices of Pentatomidae, a family encompassing numerous dangerous pest species of agricultural importance, is limited to a very few structural data (Ghazi-Bayat and Hasenfuss 1980), but no experimental study on attachment ability on different surfaces has been performed so far.
One of the most known pentatomid species is the southern green stink bug, Nezara viridula L. (Heteroptera: Pentatomidae), a serious cosmopolitan pest of different crops in most areas of the world (Todd 1989; Panizzi et al. 2000). The adults of N. viridula are able to walk on different parts of different plants, even if they prefer to lay their eggs on the abaxial leaf surface (Tood and Herzog 1980; Colazza and Bin 1995).
The aim of this paper is to characterize the attachment ability of males and females of the southern green stink bug on hydrophilic and hydrophobic artificial surfaces and on the adaxial and abaxial leaf surfaces, using as a model plant species Vicia faba L. (Fabaceae), one of the typical host plants of this polyphagous insect. In consideration that most natural surfaces, particularly plant substrates, are rough, the friction forces of N. viridula males and females were measured also on artificial substrates with different roughness.
Materials and methods
Insects
N. viridula bugs were collected in the field in July 2016 close to Foligno (Perugia, Umbria region, Italy) and reared in a controlled condition chamber (14 h photophase, temperature of 25 ± 1 °C; RH of 70 ± 10%), inside clear plastic food containers (300 mm × 195 mm × 125 mm) with 5 cm diameter mesh-covered holes. All stages were fed with seeds, fruits and vegetative parts of their preferred food plants. In particular, sunflower seeds (Helianthus annus L.) and French beans (Phaseolus vulgaris L.) were used to feed the insects. Only adult insects of both sexes have been used for the experiments. Each insect was used only once to avoid using damaged or stressed individuals.
Structural studies
The shock-frozen samples of abaxial and adaxial leaf surfaces of V. faba, and the tarsi of N. viridula were studied in a scanning electron microscope (SEM) Hitachi S-4800 (Hitachi High-Technologies Corp., Tokyo, Japan) equipped with a Gatan ALTO 2500 cryo-preparation system (Gatan Inc., Abingdon, UK). For details of sample preparation and mounting for cryo-SEM see Gorb and Gorb (2009). Total mount specimens and fractured samples were sputter-coated in frozen conditions with gold–palladium and examined at 3 kV acceleration voltage and temperature of −120 °C.
Force measurements
The experiments were performed using a centrifugal force tester and a traction force experiments set up. The reason, why these two different approaches were chosen to make similar measurements, was that the centrifugal experiment imitates a situation, where an external force (wind, predator, etc.) is applied to an insect, whereas the traction experiment rather corresponds to the general locomotion situation, where applied force is generated by an insect itself. Moreover, the traction experiment allowed testing natural substrata, which were impossible to build into our centrifugal setup. Prior to the force measurements, adults of N. viridula were weighed on a micro-balance (Mettler Toledo AG 204 Delta Range, Greifensee, Switzerland). Experimental insects were anesthetized with carbon dioxide (for 60 s) and were made incapable of flying by carefully gluing their forewings together with a small droplet of melted wax. In insects used in the traction force experiments set up, one end of a 15–20-cm long human hair was fixed with a droplet of molten wax on the pronotum. Before starting the experiments, insects were left to recover for 30 min.
All the experiments were performed during the daytime at 25 ± 2 °C and 45 ± 5% relative humidity.
The centrifugal experiments were performed to evaluate the attachment ability of N. viridula on smooth hydrophilic (glass) and more hydrophobic substrates (epoxy resin). The centrifugal force tester (Gorb et al. 2001) is constituted of a metal drum covered by a substrate disc to be tested. The metal drum is driven by a computer-controlled motor. Just above the disc, the fiber-optic sensor monitored by a computer is placed. After the positioning of the insect on the horizontal disc, the centrifuge drum was allowed to begin the rotation at a speed of 50 rev min−1 (0.833 rev s−1). The position of the insect on the drum was monitored using a combination of the focused light beam and the fiber-optic sensor. The drum speed was continuously increased until the insect lost its hold on the surface under centrifugal force (see Online Resource ESM_1 as examples of plot of insect position over time with increasing rotation speed). The rotational speed at contact loss, position of the insect on the drum (radius of rotation), and the insect mass were used to calculate the maximum frictional component of the attachment force and the safety factor (friction force normalized by the insect body weight). 19 males and 20 females were tested and five repetitions were done with each individual bug.
The traction force experiments set up was used in two sets of experiments, performed to evaluate the attachment ability of N. viridula: on smooth hydrophilic surface (glass), smooth hydrophobic surface (epoxy resin), the adaxial and abaxial leaf surfaces of the host plant V. faba (first set of experiments), and on artificial (epoxy resin) substrates with different roughness (second set of experiments).
The traction force experiments set up consisted of a force sensor FORT-10 (10 g capacity; World Precision Instruments Inc., Sarasota, FL, USA) connected to a force transducer MP 100 (Biopac Systems Ltd, Goleta, CA, USA) (Gorb et al. 2010). Data were recorded using AcqKnowledge 3.7.0 software (Biopac Systems Ltd, Goleta, CA, USA). The insect was attached to the force sensor by means of the hair glued to its pronotum and was allowed to move on the substrate to be tested in a direction perpendicular to the force sensor. The force generated by the insect walking horizontally on the test substrates was measured. Force–time curves were used to estimate the maximal friction force produced by pulling insects (examples are reported in Online Resource ESM_2).
In the first set of experiments, two V. faba leaves were cut from the plant and attached (one leaf on its abaxial side and the other on the adaxial side) with double-sided tape to a horizontal glass plate. The leaves were changed after every three tested insects to avoid their dehydration. Each insect walked on glass, epoxy resin, and on the two leaf sides, presented in random order, keeping glass as the first and last tested surfaces to check the insect condition before and after the experiment. The maximal friction force produced by insects on the different test surfaces was normalized by the body weight to obtain the safety factor. In total, 20 males and 20 females were used.
In the second set of experiments, each insect walked on glass and on seven (A–G) surfaces with different roughness, presented in random order, keeping glass as the first. In total, 20 males and 20 females were tested. The maximal friction force produced by insects on the different test surfaces was normalized as percentage of the maximal force produced on glass.
Substrate preparation and characterization
The wettability of surfaces used in experiments (smooth hydrophilic surface (glass), smooth hydrophobic surface (epoxy resin), adaxial and abaxial leaf surfaces of V. faba) was characterized by determining the contact angles of water (aqua Millipore, droplet size = 1 µl, sessile drop method) using a high-speed optical contact angle-measuring instrument OCAH 200 (Dataphysics Instruments GmbH, Filderstadt, Germany). Ten measurements (n = 10) were performed for each substrate. The values of contact angles of water obtained are given in Table 1.
Artificial (epoxy resin) substrates with different roughness were prepared to exclude the possible influence of differences in the chemical properties of different substrates. Epoxy resin casts of a clean glass surface and polishing papers with defined asperity sizes (0.3, 1, 3, 9, 12 and 260 µm) were made using a two-step moulding method (Gorb 2007) to get artificial substrates with different roughness parameters (A–G). We selected substrates (0.3–12 µm) around the so-called critical roughness, where other adhesive systems usually demonstrated minima of attachment forces (Gorb 2001; Voigt et al. 2008) and one substrate with large roughness, where claws are definitely engaged (260 µm).
The roughness of these substrates has been characterized using the white light interferometer NewView 6000 (Zygo Middlefield, CT, USA) with the objectives 5× and 50× (N.A. 0.4, window size 1400 µm × 1050 µm and 140 µm × 105 µm, respectively). The roughness of the adaxial and abaxial leaf surfaces of V. faba was measured using the same method. Five individual measurements (n = 5) were performed for each substrate. Roughness data for the above mentioned surfaces are given in Table 2.
Statistical analysis
Friction force and safety factor (friction force divided by the insect weight) data obtained in centrifugal force test and in traction force experiments were analyzed with two-way repeated measures ANOVA (Statistica 6.0, Statsoft Inc. 2001) considering the sex and the surface as main factors. F tests were used to assess the significance of the effects and their interactions. For significant factors, Tukey’s HSD post hoc test for multiple comparisons between means was used. To evaluate the possible dependence of friction force and safety factor on body mass, data obtained from males and females on hydrophilic surface were fitted with the linear regression and analyzed using one-way ANOVA. In the traction force experiments performed to evaluate the attachment ability of N. viridula on smooth hydrophilic vs. hydrophobic surface and on the adaxial vs. abaxial leaf surfaces, the safety factor (friction force divided by the insect weight) obtained on the glass at the beginning of the experiment was compared to that obtained on glass at the end of the experimental series using the Student’s t test for dependent samples. The body masses of N. viridula females and males were compared using the Student’s t test for independent samples (Statistica 6.0, Statsoft Inc. 2001). Before the analysis, all the data were subjected to Box–Cox transformations to reduce data heteroscedasticity (Sokal and Rohlf 1998).
Results
Morphology of tested plant surfaces and attachment organs of N. viridula
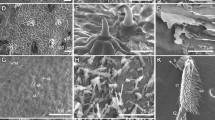
In V. faba, the adaxial and abaxial leaf surfaces show similar structure: they are composed of slightly convex epidermis cells having strongly sinuous walls and stomata scattered in-between (Fig. 1a, b, d, e). Epidermis cells are slightly microstructured with cuticular folds (Fig. 1c, f), whereas stomatal guard cells are very sparsely covered by scale-shaped epicuticular wax projections (Fig. 1g–i). Both leaf surfaces bear accumbent glandular trichomes with short stalks (stalked glandular heads, terminology after Voigt et al. 2007; Fig. 1a, d). Density of stomata was slightly higher on the abaxial side (47–50 per mm2, n = 3) than on adaxial side (36–40 per mm2, n = 3). Density of trichomes was much lower on the abaxial side (0–1.25 per mm2, n = 3) than on the adaxial side (10–12 per mm2, n = 3).

Native abaxial (a–c) and adaxial (d–f) leaf surfaces of V. faba under Cryo-SEM. a, d Leaf surfaces showing glandular trichomes; b, e epidermis cells with strongly convex surface profile; c, f microstructure of epidermis cells showing cuticular folds (arrow); g–i stomatal guard cells sparsely covered by scale-shaped epicuticular wax projections (arrows)
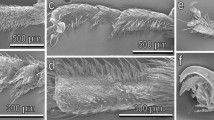
Each pretarsus of N. viridula bears a pair of flexible pulvilli, rounded cuticular structures connected to the lateral parts of the claws (Fig. 2a, b). The ventral surface of the pulvilli appears rather smooth at low magnification, whereas the dorsal surface contains a pattern of microscopical grooves (Fig. 2b, c). Together with these distally situated smooth flexible pads, N. viridula bears also a hairy pad on the ventral side of its pretarsus (Fig. 2a, d, e). The claw tip diameter was measured from SEM images and is 7.9 ± 0.4 µm, n = 34 (mean ± s.e.m.).

Tarsus of N. viridula under Cryo-SEM. a Ventro-lateral view showing different attachment devices: claws (C), a pair of flexible pulvilli (P) and hairy tarsal pad (HP); b dorsal view of the pretarsus showing the claws and pulvilli with microscopical grooves (arrows); c ventral view of one pulvillus showing its rather smooth surface; d lateral view of the basitarsus showing the hairy pad; e detail of the hairy pad showing the tips of the hairs
Attachment ability of N. viridula to smooth hydrophilic and hydrophobic substrates and to the host plant leaves
In the experiments with centrifugal force tester, the friction forces as well as the safety factors generated by females and males of N. viridula were not statistically different (Figs. 3, 4), even if the females (199.99 ± 10.09 mg) body mass was higher than that of males (133.86 ± 6.15 mg) (t = 5.25; df = 37; p < 0.0001). The friction force and the safety factor were higher on hydrophilic surface (glass) than on more hydrophobic surface (epoxy resin). The interaction between the sexes and the different surfaces was not statistically significant (Figs. 3, 4).

Friction force generated in centrifugal force experiments by Nezara viridula males and females on smooth hydrophilic and more hydrophobic surfaces. Bars indicate the mean ± s.e.m. Column couples (male and female) with different letters are significantly different at p < 0.05, Tukey’s HSD post hoc test. Table inset shows the statistical parameters of two-way repeated measures ANOVA

Safety factor (friction force divided by the insect weight) obtained in centrifugal force experiments with Nezara viridula males and females on smooth hydrophilic and more hydrophobic surfaces. Bars indicate the mean ± s.e.m. Column couples (male and female) with different letters are significantly different at p < 0.05, Tukey’s HSD post hoc test. Table inset shows the statistical parameters of two-way repeated measures ANOVA
In males, the safety factor ranged from 17 to 59 on hydrophilic substrates and from 10 to 49 on more hydrophobic substrates. In females, the safety factor was 10–70 on hydrophilic substrates and 5–64 on more hydrophobic substrates.
In males, the friction force on hydrophilic surface increased significantly (r 2 = 0.27: F = 6.3; df = 1, 17; p = 0.022) with increasing body mass, while in females this dependence has not been highlighted (r 2 = 0.005: F = 0.1; df = 1, 18; p = 0.77) (Fig. 5a). The safety factor in both males (r 2 = 0.002: F = 0.03; df = 1, 17; p = 0.88) and females (r 2 = 0.17: F = 3.6; df = 1, 18; p = 0.08) did not show a significant dependence on body mass (Fig. 5b).

Dependence of the friction force (a) and the safety factor (b) on the body mass of males (solid line and black circles) and females (broken lines and open circles), obtained in centrifugal force experiments on hydrophilic surface. Data fitted with linear regression and analyzed by one-way ANOVA
In the traction force experiments, the safety factor recorded on the different surfaces was non-significantly different between males and females (Fig. 6). It was higher on hydrophilic surface (glass) than on hydrophobic surface (epoxy resin) and V. faba leaf, and was lower on V. faba leaf than on hydrophilic and hydrophobic surfaces. The friction forces on adaxial and abaxial leaf sides differed non-significantly. The interaction between the sex and different surfaces was not statistically significant (Fig. 6). There was no significant difference between the safety factor obtained on the glass at the beginning (0.13 ± 0.07) of the experiment compared to that obtained at the end (0.12 ± 0.07) of the experiment (t = 0.93; df = 39; p = 0.3591).

Safety factor (friction force divided by the insect weight) obtained through a traction force experiments set up, with Nezara viridula males and females on smooth hydrophilic and more hydrophobic surfaces and on the two sides of Vicia faba leaf. Bars indicate the mean ± s.e.m. Column couples (male and female) with different letters are significantly different at p < 0.05, Tukey’s HSD post hoc test. Table inset shows the statistical parameters of two-way repeated measures ANOVA
Attachment ability of N. viridula to artificial substrates with different roughness
The measured friction force of N. viridula varied significantly depending on the surface roughness (see Table 2), but not on the bug sex. The interaction between the sexes and the different surfaces was not statistically significant (Fig. 7). The higher attachment ability was recorded on the surface with the highest asperity size (G). On other surfaces (A–F), the higher force was generated on smooth surface (A) and on surfaces with R a = 1.65 (D) and R a = 3.64 (E), while the lower force was obtained on those with R a = 0.35 (B) and R a = 4.04 (F), with the minimum value on that with R a = 0.80 (C) (Fig. 7).

Normalised friction force (maximal friction force on the different test surfaces normalized as percentage of the maximal force produced on glass) generated by Nezara viridula males and females on artificial epoxy resin surfaces with increasing roughness (see Table 2). Date were obtained with a traction force experiments set up. Bars indicate the mean ± s.e.m. Column couples (male and female) with different letters are significantly different at p < 0.05, Tukey’s HSD post hoc test. Table inset shows the statistical parameters of two-way repeated measures ANOVA
Discussion
Morphology of N. viridula attachment organs
We have found that each tarsus of N. viridula, belonging to the family Pentatomidae, bears a pair of distal smooth flexible pulvilli and a hairy pad on the ventral side of its basitarsus, with no evident sexual dimorphism. This condition is different from that described in other Heteroptera families such as Coreidae with smooth flexible pulvilli, (Gorb and Gorb 2004), Lygaeidae with arolium (Beutel and Gorb 2001), Mirinae with an arolium and smooth euplantulae (Voigt et al. 2007), Reduviidae with smooth pulvilli and a fossula spongiosa (Beutel and Gorb 2001), and Pyrrhocoridae with smooth pulvilli and hooked setae (Gorb et al. 2004).
It is known that many insects have different types of pads on the same leg, not only distal adhesive pads, but also pads located further proximally on the tarsus. For example, cockroaches (Clemente and Federle 2008), mantophasmids (Beutel and Gorb 2008) and stick insects (Gorb et al. 2002) show euplantulae on their tarsal segment and an arolium, while wasps (Gladun et al. 2009) and ants (Endlein and Federle 2015) bear a distal arolium and proximal frictional setae on the ventral side of their third and fourth tarsal segments. Investigations on the attachment ability of the above mentioned insects showed a division of tasks between the proximal and distal parts of the tarsus, with the proximal pads serving mostly friction and the distal adhesive pads being more specialized for adhesion (Roth and Willis 1952; Gorb et al. 2002; Beutel and Gorb 2008; Clemente and Federle 2008; Bullock and Federle 2009; Labonte and Federle 2013; Endlein and Federle 2015). A similar situation presumably applies to N. viridula, where distal smooth flexible pulvilli and hairy pads on the ventral side of its basitarsus could serve different functions.
Attachment ability of N. viridula to smooth hydrophilic and hydrophobic substrates in a centrifugal force tester
The data collected in the present study using a centrifugal force tester reveal the good attachment ability of N. viridula bugs to different substrates, including rather challenging ones. Indeed, since the safety factor was always higher than 1, it was concluded that adhesion has strongly contributed to the measured friction. In N. viridula, the safety factor ranged from 5 to 70 on the different tested surfaces; interestingly, notwithstanding the different attachment devices, the same range (7–70) has been calculated in the bug C. marginatus on polished Plexiglas (Gorb and Gorb 2004). These values are intermediate between the high safety factor values recorded in some Coleoptera belonging to Chrysomelidae, such as L. decemlineata (Voigt et al. 2008), G. viridula (Zurek et al. 2017) and G. nymphaeae (Grohmann et al. 2014), and the low safety factor values obtained in C. pomonella belonging to Lepidoptera (Al Bitar et al. 2009).
Notwithstanding the significantly different body mass of the two sexes of N. viridula, with females being heavier than males, our results revealed no difference among the friction forces they generated. Moreover, in this species, the friction force increases with increasing body mass in males but not in females and no correlation was evident between safety factor and body mass. A difference in the friction force between the two sexes has been previously recorded in L. decemlineata (Voigt et al. 2008) and G. viridula (Zurek et al. 2017), but not in C. pomonella (Al Bitar et al. 2009). However, in these three species, a difference in the safety factor of the two sexes has been found. This is due to the sexual dimorphism in the attachment devices, such as in L. decemlineata (Voigt et al. 2008), or to the difference in body mass, such as in C. pomonella (Al Bitar et al. 2009). The lack of a correlation between friction force and body mass in N. viridula females could be explained by the differences in the egg load among the females used in the experiments. The evidence that relatively heavier animals generate relatively lower force has been demonstrated in many insects with different attachment devices, where the safety factor decreased slightly with an increasing body mass, for example, in C. marginatus (Gorb and Gorb 2004). This evidence seems not to be confirmed in N. viridula, but Gorb and Gorb (2004) tested the broader range of masses of different developmental stages without distinction between the two sexes, whereas in the present study on N. viridula, we tested only adult animals. Further investigations on the role of the egg load in the female attachment ability of N. viridula should be performed to clarify this aspect.
The centrifugal experiments revealed a different attachment ability of N. viridula bugs to hydrophilic and more hydrophobic substrates. Both the friction force and safety factor were higher on the hydrophilic surface (glass, water contact angle about 37°) than on the more hydrophobic one (epoxy resin, water contact angle about 82°). However, the role of substrate wettability on the adhesion ability of insects is not fully clear because of the contrasting results obtained in the different researches with different insects (Al Bitar et al. 2009; Lüken et al. 2009; Prüm et al. 2013; Grohmann et al. 2014). Our results on N. viridula are in line with those of Lüken et al. (2009) on the beetles Cylas puncticollis and Coccinella septempunctata In this regard, the role of tarsal fluid needs to be elucidate.
Attachment ability of N. viridula to smooth hydrophilic and hydrophobic substrates and to the host plant leaves in traction force experiments
In the traction force experiments, similar to that obtained with the centrifugal force tester, the safety factor obtained for different surfaces was non-significantly different between males and females: it was higher on the hydrophilic surface (glass, water contact angle about 40°) than on the hydrophobic surface (epoxy resin, water contact angle about 98°). Our results also showed that the safety factor was lower on both sides of V. faba leaf compared with both hydrophilic and hydrophobic artificial surfaces. This result could be explained by a combined effect of the low leaf surface wettability (contact angle of water 86–87°), similar to that of more hydrophobic artificial surface, and the combined effect of the coarse (R a = 20–23 µm) and fine (R a = 3–4 µm) leaf surface roughness. In this regard, it is important to note here that although insect adhesive pads have evolved for efficient locomotion on plant surfaces, during the long period of coevolution with insects, plants have developed a wide diversity of structural and chemical features on their surfaces for defense against herbivores: the evolution of plant surfaces and insect pads is a competition between insect attachment systems and plant anti-attachment surfaces (Gorb 2005). Interestingly, N. viridula bugs showed similar friction forces on adaxial and abaxial leaf sides of V. faba. This is in agreement with the similar morphology of the two V. faba leaf surfaces: We found no specialized defensive structures on the abaxial side of the plant leaf nor a particular adaptation of N. viridula tarsi to this side of the leaf, where usually oviposition takes place (Tood and Herzog 1980; Colazza and Bin 1995). The lack of specific adaptations of the bug to this plant species can be explained by the fact that N. viridula is a very polyphagous herbivore-attacking different plants belonging to at least 32 families (Panizzi et al. 2000).
Another interesting result of this study is that insect attachment forces revealed by the application of two different methods were different on the same substrates (Figs. 4, 6). The larger values in centrifugal force experiments than in traction experiments can be explained by two aspects. First, the centrifugal experiment corresponds to a situation, where an external force is applied to an insect, whereas the traction experiment rather corresponds to the general locomotion situation, where the force is generated by an insect itself. This implies that the attachment forces measured in the centrifugal experiment correspond to the maximum resistance of adhesive system to external forces, whereas the attachment force of the traction experiment might be limited by the performance of skeleton-muscle system. Second, the velocity of the animals on the centrifuge might be higher than in the traction experiment, which can potentially add to viscose effects on the centrifuge, and therefore to the stronger forces measured in this type of experiment.
Attachment ability of N. viridula to artificial substrates with different roughness
The friction force varied significantly with roughness, with no significant difference between males and females. The higher attachment ability was recorded on the surface with very high asperity (G), (R a about 109 µm). At large scales, surface roughness strongly enhances attachment abilities of insects due to an increased contribution of the claws. It is known that insect tarsi equipped only with claws can attach to a vertical surface only at a substrate roughness comparable or larger than the diameter of the claw tip (Dai et al. 2002; Song et al. 2016). Considering that in N. viridula, claw tip diameter is about 7.9 µm, in our experiments the role of claws can be taken into account only on the surface with very high asperity (G). Claws can have a relevant role on plant surfaces covered with large trichomes where one can expect strong attachment of N. viridula. On surfaces with the roughness ranging from R a = 0.12 µm (smooth surface) to R a = 4.04 µm, the higher attachment force was generated on the smooth surface, probably due to the contribution of smooth flexible distal pulvilli, which are possibly adapted for generating adhesion to relatively smooth surfaces. On the surfaces with very fine asperities (R a = 0.80 µm), the force is considerably lower, if compared to the smooth surface. Similar effect, previously reported in the fly Musca domestica (Peressadko and Gorb 2004) and beetles G. viridula (Zurek et al. 2017) and L. decemlineata (Voigt et al. 2008), was explained by the reduction of the contact area between small surface irregularities and the characteristic size and shape of setal tips, typical of the hairy attachment devices of these insects. The previous authors found the minimum friction force on surfaces with asperity sizes of 0.3 and 1 µm; the force tended to increase with an increase of the asperity size due to the involvement of claws (Voigt et al. 2008). Similarly, in our experiments with N. viridula, the friction force increased at R a = 1.65 µm, but surprisingly decreased at higher R a values (3.64 and 4.04 µm). We hypothesize that these results differing from those obtained with other insects could be related to the particular combination of two types of attachment devices of N. viridula showing both distal smooth adhesive pads and hairy pads located proximally on the tarsus. An effect of the tarsal fluids produced by the two different pads of N. viridula could be also a reason for these differences.
References
Al Bitar L, Voigt D, Zebitz CPW, Gorb SN (2009) Tarsal morphology and attachment ability of the codling moth Cydia pomonella L. (Lepidoptera, Tortricidae) to smooth surfaces. J Insect Physiol 55:1029–1038
Arnold JW (1974) Adaptive features on the tarsi of cockroaches (Insecta: Dictyoptera). Int J Insect Morphol Embryol 3:317–334
Betz O (2002) Performance and adaptive value of tarsal morphology in rove beetles of the genus Stenus (Coleoptera, Staphylinidae). J Exp Biol 205:1097–1113
Beutel R, Gorb SN (2001) Ultrastructure of attachment specializations of hexapods (Arthropoda): evolutionary patterns inferred from a revised ordinal phylogeny. J Zool Syst Evol Res 39:177–207
Beutel RG, Gorb SN (2006) A revised interpretation of the evolution of attachment structures in Hexapoda with special emphasis on Mantophasmatodea. Arthropod Syst Phylo 64:3–25
Beutel RG, Gorb SN (2008) Evolutionary scenarios for unusual attachment devices of Phasmatodea and Mantophasmatodea (Insecta). Syst Entomol 33:501–510
Brainerd EL (1994) Adhesion force of ants on smooth surfaces. Am Zool 34:128
Bullock JMR, Federle W (2009) Division of labour and sex differences between fibrillar, tarsal adhesive pads in beetles: effective elastic modulus and attachment performance. J Exp Biol 212:1876–1888
Clemente CJ, Federle W (2008) Pushing versus pulling: division of labour between tarsal attachment pads in cockroaches. Proc R Soc B 275:1329–1336
Colazza S, Bin F (1995) Efficiency of Trissolcus basalis (Hymenoptera: Scelionidae) as an egg parasitoid of Nezara viridula (Heteroptera: Pentatomidae) in Central Italy. Environ Entomol 24:1703–1707
Dai Z, Gorb SN, Schwarz U (2002) Roughness-dependent friction force of the tarsal claw system in the beetle Pachnoda marginata (Coleoptera, Scarabaeidae). J Exp Biol 205:2479–2488
Dirks J-H, Federle W (2011) Fluid-based adhesion in insects—principles and challenges. Soft Matter 7:11047
Dixon AFG, Croghan PC, Gowing RP (1990) The mechanism by which aphids adhere to smooth surfaces. J Exp Biol 152:243–253
Endlein T, Federle W (2008) Walking on smooth or rough ground: passive control of pretarsal attachment in ants. J Comp Physiol A 194:49–60
Endlein T, Federle W (2015) On heels and toes: How ants climb with adhesive pads and tarsal friction hair arrays. PLoS One 10:1–16. doi:10.1371/journal.pone.0141269
Federle W, Endlein T (2004) Locomotion and adhesion: dynamic control of adhesive surface contact in ants. Arthropod Struct Dev 33:67–75
Federle W, Rohrseitz K, Hölldobler B (2000) Attachment forces of ants measured with a centrifuge: better ‘wax-runners’ have a poorer attachment to a smooth surface. J Exp Biol 203:505–512
Federle W, Brainerd EL, McMahon TA, Hölldobler B (2001) Biomechanics of the movable pretarsal adhesive organ in ants and bees. Proc Natl Acad Sci USA 98:6215–6220
Federle W, Riehle M, Curtis ASG, Full RJ (2002) An integrative study of insect adhesion mechanics and wet adhesion of pretarsal pads in ants. Integr Comp Biol 42:1100–1106
Frantsevich L, Gorb SN (2002) Arcus as a tensegrity structure in the arolium of wasps (Hymenoptera: Vespidae). Zoology 105:225–237
Frantsevich L, Gorb S (2004) Structure and mechanics of the tarsal chain in the hornet, Vespa crabro (Hymenoptera: Vespidae): implications on the attachment mechanism. Arthropod Struct Dev 33:77–89
Frantsevich L, Ji A, Dai Z, Wang J, Frantsevich LA, Gorb SN (2008) Adhesive properties of the arolium of a lantern-fly, Lycorma delicatula (Auchenorrhyncha, Fulgoridae). J Insect Physiol 54:818–827
Ghazi-Bayat A, Hasenfuss I (1980) Zur Herkunft der Adhäsionsflüssigkeit der tarsalen Haftlappen bei den Pentatomidae (Heteroptera). Zool Anz 204:13–18
Gladun D, Gorb SN, Frantsevich LI (2009) Alternative tasks of the insect arolium with special reference to Hymenoptera. In: Gorb SN (ed) Functional surfaces in biology—adhesion related phenomena, vol 2. Springer, Heidelberg, pp 67–103
Gorb SN (2001) Attachment devices of insect cuticle. Kluwer Academic, Dordrecht
Gorb S (2005) Uncovering insect stickiness: structure and properties of hairy attachment devices. Am Entomol 51:31–35
Gorb SN (2007) Visualisation of native surfaces by two-step molding. Microsc Today 15:44–46
Gorb EV, Gorb SN (2002) Attachment ability of the beetle Chrysolina fastuosa on various plant surfaces. Entomol Exp Appl 105:13–28
Gorb SN, Gorb EV (2004) Ontogenesis of the attachment ability in the bug Coreus marginatus (Heteroptera, Insecta). J Exp Biol 207:2917–2924
Gorb E, Gorb S (2009) Functional surfaces in the pitcher of the carnivorous plant Nepenthes alata: a cryo-SEM approach. In: Gorb SN (ed) Functional surfaces in biology—adhesion related phenomena, vol 2. Springer, Heidelberg, pp 205–238
Gorb SN, Scherge M (2000) Biological microtribology: anisotropy in frictional forces of orthopteran attachment pads reflects the ultrastructure of a highly deformable material. Proc R Soc Lond B 267:1239–1244
Gorb SN, Jiao Y, Scherge M (2000) Ultrastructural, architectural and mechanical properties of attachment pads in Tettigonia viridissima (Orthoptera, Tettigoniidae). J Comp Physiol A 186:821–831
Gorb SN, Gorb EV, Kastner V (2001) Scale effects on the attachment pads and friction forces in syrphid flies (Diptera, Syrphidae). J Exp Biol 204:1421–1431
Gorb SN, Beutel RG, Gorb EV, Jiao Y, Kastner V, Niederegger S, Popov VL, Scherge M, Schwarz U, Vötsch W (2002) Structural design and biome- chanics of friction-based releasable attachment devices in insects. Integr Comp Biol 42:1127–1139
Gorb E, Kastner V, Peressadko A, Arzt E, Gaume L, Rowe N, Gorb S (2004) Structure and properties of the glandular surface in the digestive zone of the pitcher in the carnivorous plant Nepenthes ventrata and its role in insect trapping and retention. J Exp Biol 207:2947–2963
Gorb EV, Hosoda N, Miksch C, Gorb SN (2010) Slippery pores: anti-adhesive effect of nanoporous substrates on the beetle attachment system. J R Soc Interface 7:1571–1579
Grohmann C, Blankenstein A, Koops S, Gorb SN (2014) Attachment of Galerucella nymphaeae (Coleoptera, Chrysomelidae) to surfaces with different surface energy. J Exp Biol 217:4213–4220. doi:10.1242/jeb.108902
Heming BS (1972) Functional morphology of the pretarsus in larval Thysanoptera. Can J Zool 50:751–766
Inc StatSoft (2001) Statistica (Data Analysis Software System), Version 6. StatSoft Italia S.r.l, Italy
Ishii S (1987) Adhesion of a leaf feeding ladybird Epilachna vigintioctomaculata (Coleoptera: Coccinellidae) on a vertically smooth surface. Appl Entomol Zool 22:222–228
Jiao Y, Gorb SN, Scherge M (2000) Adhesion measured on the attachment pads of Tettigonia viridissima (Orthoptera, Insecta). J Exp Biol 203:1887–1895
Labonte D, Federle W (2013) Functionally different pads on the same foot allow control of attachment: Stick insects have load-sensitive “heel” pads for friction and shear-sensitive “toe” pads for adhesion. PLoS One 12:e81943
Lees AD, Hardie J (1988) The organs of adhesion in the aphid Megoura viciae. J Exp Biol 136:209–228
Lüken D, Voigt D, Gorb SN, Zebitz CPW (2009) Die Tarsenmorphologie und die Haftfähigkeit des Schwarzen Batatenkäfers Cylas puncticollis (Boheman) auf glatten Oberflächen mit unterschiedlichen physiko-chemischen Eigenschaften. Mitt Dtsch Ges Allg Angew Entomol 17:109–113
Nachtigall W (1974) Biological mechanisms of attachment. Springer, Berlin
Panizzi AR, McPherson JE, James DG, Javaheri M, McPherson RM (2000) Stink bugs (Pentatomidae). In: Schaefer CW, Panizzi AR (eds) Heteroptera of economic importance. CRC, Boca Raton, pp 421–474
Peressadko AG, Gorb SN (2004) Surface profile and friction force generated by insects. In: First international industrial conference, Bionik 2004, pp 257–261
Prüm B, Bohn HF, Seidel R, Rubach S, Speck T (2013) Plant surfaces with cuticular folds and their replicas: influence of microstructuring and surface chemistry on the attachment of a leaf beetle. Acta Biomater 9:6360–6368
Roth LM, Willis ER (1952) Tarsal structure and climbing ability of cockroaches. J Exp Biol 119:483–517
Sokal RR, Rohlf FJ (1998) Biometry. W.E. Freeman and Company, New York
Song Y, Dai Z, Wang Z, Ji A, Gorb SN (2016) The synergy between the insect-inspired claws and adhesive pads increases the attachment ability on various rough surfaces. Scientific Reports 6:N 26219
Southwood R (1986) Plant surfaces and insects—an overview. In: Juniper B, Southwood R (eds) Insects and the plant surface. Edward Arnold, London, pp 1–22
Stork NE (1980) Experimental analysis of adhesion of Chrysolina polita (Chrysomelidae: Coleoptera) on a variety of surfaces. J Exp Biol 88:91–107
Todd JW (1989) Ecology and behavior of Nezara viridula. Annu Rev Entomol 34:273–292
Tood JW, Herzog DC (1980) Sampling phytophagous pentatomidae on soybean. In: Kogan M, Herzog DC (eds) Sampling methods in soybean entomology. Springer, New York, pp 438–478
Voigt D, Gorb EV, Gorb SN (2007) Plant surface-bug interactions: Dicyphus errans stalking along trichomes. Arthropod-Plant Interact 1:221–243
Voigt D, Schuppert JM, Dattinger S, Gorb SN (2008) Sexual dimorphism in the attachment ability of the Colorado potato beetle Leptinotarsa decemlineata (Coleoptera: Chrysomelidae) to rough substrates. J Insect Physiol 54:765–776
Walker G, Yule AB, Ratcliffe J (1985) The adhesive organ of the blowfly, Calliphora vomitoria: a functional approach (Diptera: Calliphoridae). J Zool London 205:297–307
Zurek DB, Gorb SN, Voigt D (2017) Changes in tarsal morphology and attachment ability to rough surfaces during ontogenesis in the beetle Gastrophysa viridula (Coleoptera, Chrysomelidae). Arthropod Struct Dev 46:130–137
Acknowledgements
The research has been performed thanks to the knowledge acquired during the Erasmus grant (Staff mobility for training 2014-15 (MR) and 2016-17 (GS)) at the Zoological Institute, Functional Morphology and Biomechanics, Christian Albrechts Universitat, Kiel (Germany).
Author information
Authors and Affiliations
Corresponding author
Ethics declarations
Conflict of interest
The authors declare that they have no conflict of interest.
Electronic supplementary material
Below is the link to the electronic supplementary material.
359_2017_1177_MOESM1_ESM.tif
Centrifugal force experiments. Examples of plot of the Nezara viridula position over time with increasing rotation speed on hydrophilic and more hydrophobic surfaces (TIFF 146 kb)
359_2017_1177_MOESM2_ESM.tif
Traction force experiments. Examples of force–time curves used to estimate the maximal friction force obtained by Nezara viridula traction on hydrophilic and hydrophobic surface and on adaxial and abaxial Vicia faba leaf surface (TIFF 281 kb)
Rights and permissions
About this article

Cite this article
Salerno, G., Rebora, M., Gorb, E. et al. Attachment ability of the southern green stink bug Nezara viridula (Heteroptera: Pentatomidae). J Comp Physiol A 203, 601–611 (2017). https://doi.org/10.1007/s00359-017-1177-5
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00359-017-1177-5