
Abstract
Desert ants, Cataglyphis fortis, perform large-scale foraging trips in their featureless habitat using path integration as their main navigation tool. To determine their walking direction they use primarily celestial cues, the sky’s polarization pattern and the sun position. To examine the relative importance of these two celestial cues, we performed cue conflict experiments. We manipulated the polarization pattern experienced by the ants during their outbound foraging excursions, reducing it to a single electric field (e-)vector direction with a linear polarization filter. The simultaneous view of the sun created situations in which the directional information of the sun and the polarization compass disagreed. The heading directions of the homebound runs recorded on a test field with full view of the natural sky demonstrate that none of both compasses completely dominated over the other. Rather the ants seemed to compute an intermediate homing direction to which both compass systems contributed roughly equally. Direct sunlight and polarized light are detected in different regions of the ant’s compound eye, suggesting two separate pathways for obtaining directional information. In the experimental paradigm applied here, these two pathways seem to feed into the path integrator with similar weights.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
While foraging in their featureless natural habitat desert ants, Cataglyphis fortis, permanently compute and update positional information by means of path integration. This enables them to return to their inconspicuous nest entrance on the shortest way possible (Müller and Wehner 1988; Wehner and Srinivasan 2003). To compute the so-called home vector, which reflects the actual position relative to the starting point, i.e. the nest, they continually monitor the walking distances and the corresponding steering angles. In sophisticated experiments, Wittlinger and colleagues demonstrated that C. fortis ants determine the walking distance by counting the steps, with a stride integrator (Wittlinger et al. 2006, 2007). The second necessary information, about walking direction, is primarily derived from the celestial pattern of polarized light (via a POL compass) and the position of the sun (the sun compass). Under certain conditions, ants can also infer the walking direction, though less precisely, from the spectral gradient of the sky or even from wind blowing from a constant direction (Wehner 1994, 1997, 2003; Wehner and Müller 2006; Müller and Wehner 2007).
A sun compass is used by many species across the animal kingdom (insects, birds, mammals). Already in 1911, Felix Santschi showed in his famous mirror experiments that desert ants indeed use the sun as a compass reference. Ants changed their walking direction in a predictable way when a mirrored sun was presented at another point in the sky while view of the natural sun was occluded (Santschi 1911). Thus, a sun compass provides information about the walking direction with respect to the azimuth position of the sun. Several experiments have shown that bees and ants do compensate for the sun’s daily movement relative to the earth coordinates (Lindauer 1959; Wehner and Müller 1993; Dyer and Dickinson 1994; Dovey et al. 2013; Kemfort and Towne 2013). During its westward movement, the sun’s elevation also changes, however the sun’s altitude does not seem to provide directional information (Duelli and Wehner 1973).
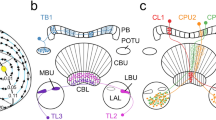
Like many other insects (e.g. bees, crickets, locusts), desert ants can perceive polarized light and use this cue to navigate (Rossel and Wehner 1986; Wehner 1994; Wehner and Labhart 2006). The scattered polarized sunlight creates a characteristic e-vector pattern across the entire hemisphere (Wehner 1994, 2003). The e-vectors of the polarized light are arranged as concentric circles around the sun and change their orientation according to the sun’s elevation (Fig. 1c). From an ant’s perspective, the sun’s movement leads to a systematically changing e-vector pattern throughout the day, except for e-vectors along the solar meridian which maintain a horizontal or orthogonal orientation independent of the elevation of the sun. The detection of polarized light is restricted to specialized ommatidia located in the upper part of their compound eyes, the dorsal rim area (DRA) (Fent 1986; Labhart and Meyer 1999). To decode the compass information of the complex and constantly changing POL pattern of the natural sky, bees and ants rely on an internal template, a simplified matrix of the sky’s polarization pattern (Rossel and Wehner 1982; Fent 1986; Wehner 1994, 2003).

a Scheme of the training situation with a parallel orientation of the POL filter. The grey arrow gives the training direction imposed by the channel; the angle between the grey arrow and the stippled line indicates the nest direction relative to the sun azimuth, while the POL filter indicates a nest direction at a right angle to the sun azimuth. b On the test field with full view of the sky, the ant has two extreme options for its homing direction: based on the POL compass it would take a direction perpendicular to the sun meridian (blue double arrow); based on the sun compass it can determine the unequivocal nest direction (orange arrow), or it can adhere to a combination of the two cues. If the ant relies on the POL information, its homing direction will change, depending on the time of the day (and the corresponding position of the e-vector direction on the sky corresponding to the internal template). The yellow circles in a, b depict the sun. c The natural hemisphere with the polarized scattered sunlight arranged in concentric circles around the sun (black bars indicate e-vector orientation, yellow circle represents the sun at an elevation of μ = 6° above horizon; modified from (Fent 1986))
The multitude of directional information (sun position, POL pattern, spectral gradient, wind) has to be evaluated and weighted to avoid ambiguities for the computation of a specific unequivocal homing course. One possibility to deal with this problem would be that the integration of information will be adjusted depending on its relative reliability for the actual navigation task, possibly suggesting a Bayesian type of cue integration (for reviews see Deneve and Pouget 2004; Cheng et al. 2007; Collett 2012). However, another way would be a strict hierarchy, i.e. the exclusive dominance of one compass cue, whereas the information given by other cues is discarded; only in case that the dominant cue is not available the information of the “back-up cues” would be considered. Cue conflict experiments offer a straightforward approach to investigate the interaction of different compass cues.
First insights into the integration of POL and sun compass information were obtained in an experimental paradigm that restricted the ants’ view of the celestial POL pattern. This manipulation led to systematic navigational errors that persisted even if the sun was visible, which allows accurate navigation if presented alone (Wehner and Müller 2006). The authors concluded that in desert ant navigation the POL compass dominates the sun compass (for a similar conclusion see also Duelli and Wehner 1973).
Recent experiments showed that ants navigate accurately even under a very restricted, uniform POL pattern generated by a linear polarizing filter (POL filter) while the view of the sun was occluded. If, for example, ants are trained under a POL filter that was oriented orthogonally to the ants’ walking direction this e-vector orientation mimics a walking direction along the solar meridian. On the test field, with full view of the sky, ants indeed chose homing directions along the solar meridian (Lebhardt et al. 2012). In the present experiments, this uniform POL pattern now was used to provide POL compass information that could be decoupled from the actual position of the sun. Applying this paradigm allowed us to create an artificial situation setting sun and POL compass information in direct conflict, to reveal the computation and the interaction of these two major compass cues.
Materials and methods
Training and test procedure
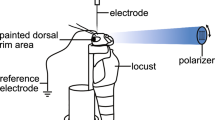
The experiments were performed on the desert ant species C. fortis (Forel 1902) and took place in their natural habitat, a salt pan near Menzel Chaker (34°57′ N, 10°24′ E) in Tunisia during the summer in 2012. Ants were trained to walk to a feeder through an aluminium channel covered with a polarization filter transparency (POL filter). After arriving at the feeder, filled with biscuit crumbs, the ants were caught one at a time and transferred to a distant test field. This test field was painted as a grid (20 × 20 m, mesh width 1 m) on the flat desert floor. The test field and the surroundings were devoid of any landmarks. Immediately after training, an ant was released in the centre of the test grid with a crumb of biscuit and its heading direction was recorded (until the ant switched to search loops as indicated by the typical U-turn). The exact number of training visits at the feeder was not recorded, but as the ants shuttled continuously between the nest and the feeder, most of the tested ants had covered the training distance several times. In addition, previous experiments showed that desert ants always perform their homebound run relying on the most recent outbound run (Wehner et al. 2002). Different nests were used for each experimental set-up and test condition. The training channels were U-shaped with 7 cm height and width (for details see Grah et al. 2005) and 7.5 m long. Fine sand glued on the bottom of the channel ensured a good walking grip. The side walls were coloured matt grey to eliminate reflection and in addition the upper parts were covered with adhesive tape to prevent the ants from climbing out of the channel. The visual panorama inside the channel provided no landmarks and minimal optic flow. A plastic enclosure around the nest entrance guided the ants directly into the channel. From the nest entrance until the beginning of the POL filter sheet the ants had free view of the sky for about a distance of 15–20 cm.
Manipulation of compass cues
The use of a POL transparency (HN38 Polarisationsfolie linear, 0.3 mm; Fa. ITOS GmBH, Mainz, Germany) allowed us to manipulate the POL information experienced by the ants during training. The POL transparency provided linear polarized light, also in the UV range, the wavelength range in which ants perceive polarized light (for transmission curve of the POL filter and further details see Heß et al. 2009).
In the first paradigm, the ants experienced particularly restricted POL information along the entire training distance, i.e. a 7.5 m long, approximately 60° broad overhead stripe with a single e-vector orientation. Earlier experiments have shown that this type of directional information is sufficient to allow the ants to navigate accurately (Lebhardt et al. 2012). However, in contrast to the earlier experiments in the present paradigm the ants had also visual access to the sun while walking under the POL filter. As a consequence, the training direction (Fig. 1a, grey arrow) could be determined relative to two different reference directions, the sun azimuth and the POL filter orientation (here parallel to the walking direction). Hence, on the open test field, two extreme homing directions are possible (Fig. 1b): the orange arrow indicates the expected home path according to the sun compass. Although ants are able to compensate for the sun’s daily movement (Wehner and Müller 1993), this played a minor role in our experiments since the ants were released immediately after training. The blue arrow represents the POL compass direction (here perpendicular to the solar meridian, in case of an e-vector orientation parallel to the walking direction, as shown in a). If the ants would rely exclusively on the POL cue, their walking directions on the test field should follow the sun’s azimuthal course.
To subject the ants to a cue conflict situation, it had to be ensured that the channel was directly illuminated by the sun for the entire training period and, therefore, guaranteed that the ants had direct view of the sun during their outbound run. Thus, the time during which tests could be performed depended on the particular orientation of the training channel and was limited by the sun’s elevation as the aluminium channels provided a maximum viewing angle of 60°. We applied three different e-vector orientations of the POL filters relative to the walking direction (orthogonal, parallel, oblique). For each e-vector orientation, we chose two particular training directions, so that the discrepancy of the directional information between the POL compass and the sun compass was maximal at different times of the day and changed during the test period: 270° or 360° (=0°= North) for the e-vector patterns orthogonal or parallel to the walking direction, and 135° or 225° for an e-vector orientation oblique (45°) to the walking direction. The actual nest directions were thus 90°, 180°, or 315° and 45°, respectively.
In a second series of experiments, we either changed the walking direction with an unchanged POL pattern or changed the POL pattern while the actual walking direction remained constant (see also Lebhardt et al. 2012). In the former case, we forced the ants to follow a 90° bend of the channel system while the POL information mimicked a straight walking direction. In the reciprocal experiment, the ants experienced a 90° turn of the e-vector orientation while walking in a straight channel. In both cases, they experienced a sudden change of one cue relative to the other.
Data evaluation and statistical analysis
For each homing ant, we determined its heading direction at 2, 3 and 4 m from the release point on the test field. This measure provided a good representation of the initially fairly straight walking directions of ants (see Fig. 2j). We measured the deviation of the recorded homing directions from the expected POL compass direction based on the experienced e-vector pattern during training and checked for a dependence on the angular distance between POL compass and sun compass direction. In the Figures, we plotted the 3 m data relative to the expected POL direction and against the angular distance between the POL compass and the sun compass direction. Evaluation of the 2 and 4 m data yielded the same results and conclusions. Since two homing directions are expected for a single e-vector orientation caused by the symmetry of the POL pattern, we referred each of our data sets always to the more likely expected POL direction; i.e. the one with the shorter angular distance to the recorded homing direction. We subsequently subjected our data to a linear regression analysis and performed a one-way ANCOVA as well as adequate post hoc tests using the PAST software package (version 2.17, http://folk.uio.no/ohammer/past; Hammer et al. 2001).

Homing directions of individually tested ants after training with a single e-vector orientation and direct view of the sun. The symbols in the diagrams of the left and the middle columns depict the recorded homing path of single ants at 3 m distance from the release point at different times of the day; each symbol represents the heading direction of an individual. The straight lines represent the actual nest direction; the solid curves represent the solar azimuth and the dashed curves the POL compass-based homing direction. The diagrams are scaled according to the earth coordinates (0° means North). Solar noon was around 12:22 during the entire test period. The small insets depict the training directions (compare grey arrow in Fig. 1a) and the respective POL filter orientation. In the right column, the data are plotted relative to the POL compass direction (ordinate) and against the angular distance between the POL and sun compass direction (abscissa). The abscissa represents the POL compass direction and the diagonal line corresponds to the sun compass direction. In each diagram, a linear regression (stippled line) describes the distributions of the data (c, f, i). a, b Linear regression analysis for each channel orientation of the orthogonal e-vector situation separately: a nest in 90°: y = 0.37x + 0.85; R 2 = 0.62, N = 89 and b nest in 180°: y = 0.44x − 10.95; R 2 = 0.60, N = 32, respectively; the slopes do not deviate significantly from each other; one-way ANCOVA: p = 0.31. d, e For the two training situations with parallel e-vector orientation separately: d nest in 180°: y = 0.5x − 7.6, R 2 = 0.6, N = 35 and e nest in 90°: y = 0.55x + 1.34 and R 2 = 0.82, N = 64 (one-way ANCOVA for slope homogeneity: p = 0.46). g, h The training situations with the oblique e-vector pattern lead to the linear regression functions: g nest in 315°: y = 0.5x + 3.08, R 2 = 0.7, N = 55 and h nest in 45°: y = 0.43x − 6.27 and R 2 = 0.56, N = 64 (the slopes do not deviate significantly, one-way ANCOVA: p = 0.34). j Three examples of typical homing courses on the open test field. k Sample of three trajectories of ants exhibiting a zigzag homing path after training with parallel e-vector orientation and a nest direction of 180° (R release point)
Results
Interactions of sun and polarization compass in the first cue conflict paradigm
During training, the ants had direct view of the sun while at the same time experiencing an overhead stripe with a single e-vector orientation. If an ant relies exclusively on the POL cue it would navigate in a direction relative to the sun azimuth in which it expects the experienced POL information in the sky (Wehner 1997). For example, trained with an e-vector orientation orthogonal to the walking direction, the ant determines its homing direction relative to the solar meridian, i.e. either towards the sun or in the opposite direction (Lebhardt et al. 2012). Alternatively, as the ant could also see the sun during the training, it could determine its walking direction on the basis of the sun’s position during the outbound run. Relying on the sun compass information only, the ant would be able to head for the correct nest direction irrespective of the time of the day; since the animals were released immediately after training, they had not to compensate for the movement of the sun.
Our experimental paradigm now challenged the ant’s navigational system with a conflict situation where the two homing directions, according to POL and sun compass, pointed in different directions and deviated from each other to varying degrees, depending on the time of the day (see Fig. 1). In Fig. 2a, b, the heading directions of the ants tested at different times of the day are plotted according to the earth coordinates (0° corresponds to North). The shift of the solar azimuth during the day is shown as a solid red curve, whereas the dashed line represents the “antisun” azimuth. The expected heading directions according to the POL compass based on the orthogonal e-vector orientation experienced during training correspond to the solar or antisolar direction, and, therefore, should align on the red solid or the stippled curve. The horizontal straight lines (at 90° in Fig. 2a, and at 180° in Fig. 2b) depict the “correct” nest direction, i.e. the expected direction derived from the sun compass. As evident in both graphs (Fig. 2a, b), after training with contradictory sun and POL compass information the ants did not adhere to the expected homing directions according to either cue. Rather, most ants headed in a compromise direction between the two “pure” compass directions. Remarkably, in Fig. 2a, the preferred direction according to the POL information changed around noon, from solar to antisolar (solar noon was around 12:22 during the entire test period). This change was not evident with the other training direction (Fig. 2b).
Our previous work has shown that the artificial POL pattern, a single e-vector orientation imposed by a POL filter, allows a solid prediction of and does not affect the accuracy of the homing direction (Lebhardt et al. 2012). Thus, the impact of the sun compass on the experiments described here can be quantified by how far the ants’ heading direction deviate from the POL direction, which the ants select when relying exclusively on the experienced e-vector orientation. Hence, to quantify this “intermediate” homing direction, we plotted an ants’ heading direction against the angular distance between the POL compass and the sun compass direction (Fig. 2c). The slope of the linear regression function in Fig. 2c yields an estimate of the relative weights of both compass cues. The deviations of the ants’ heading directions relative to the predicted POL compass direction increased linearly with increased angular distance between the POL compass and the sun compass directions (the latter represented by the diagonal). The distribution of the ants’ heading directions can be described by the linear regression function y = 0.4x − 2.24 (R 2 = 0.60; N = 121). The slope represents the mean deviation from the POL compass direction (for the two channel orientations separately, nest in 90°: y = 0.37x + 0.85; R 2 = 0.62, N = 89, Fig. 2a, and nest in 180°: y = 0.44x − 10.95; R 2 = 0.60, N = 32, Fig. 2b, respectively; the slopes do not deviate significantly from each other; one-way ANCOVA: p = 0.31).
We repeated the experiment using two additional e-vector orientations relative to the walking direction. In all situations, the ants behaved similarly and chose homing directions lying approximately half way between the expected sun and POL compass direction (Fig. 2d, e, g, h). For the parallel e-vector orientation (Fig. 2d–f), a linear regression was calculated as y = 0.52x − 2.62 with a correlation coefficient of R 2 = 0.75 (N = 99). The training situations with the oblique e-vector pattern (Fig. 2g–i) yielded the linear regression function y = 0.48x − 1.26 and a correlation coefficient of R 2 = 0.64 (N = 119).
In all cue conflict situations presented here, the heading directions scattered around a direction lying roughly half way between the two “pure” compass directions with a slope of approximately 0.5. The slopes of the six different training situations are not significantly different (after Bonferroni adjustment). The only significant difference we found (p < 0.003), was between the slopes of the training situations with an orthogonal e-vector pattern and the nest in 90° (Fig. 2a) and a parallel e-vector orientation and the nest in 90° (Fig. 2e).
In Fig. 3a all data of the experiment with POL filter and direct view of the sun are combined (linear regression: y = 0.47x − 2.09, R 2 = 0.66, N = 339). This slope is highly significantly different from both slopes of 0 or 1, respectively (F test: p < 0.0001). For comparison, Fig. 3b depicts the homing directions after training under a POL filter but without direct view of the sun (see Lebhardt et al. 2012). In this experiment, the recorded heading directions normalized to the POL compass direction scattered around the abscissa, i.e. the heading directions showed only a small deviation from the slope of zero expected according to the POL compass (y = 0.05x − 6.05; R 2 = 0.05; N = 162) and were largely independent of the angular distance between the two compass directions.

Manipulating the reliability of compass cues in a second cue conflict paradigm
A second approach aimed at making one of the compass cues less reliable. In the first paradigm, we trained ants with a uniform e-vector pattern along the entire training distance while they were actually forced to change direction by 90° (inset on the left of Fig. 4a). Thus, the ants experienced a constant POL direction, but the sun compass indicated a sudden change in the walking direction inconsistent with the POL cue. An ant experienced first a good agreement between the two compasses, which then changed to an inconsistency, or vice versa. The recorded homing directions show a very similar behaviour of homing ants as observed in the same situation within a straight channel (compare Figs. 2a, 4a). The statistical analysis revealed no difference between the two experimental situations (Fig. 4b: y = 0.42x − 1.06, R 2 = 0.73, N = 45 compared to y = 0.4x − 2.24, R 2 = 0.6 in the straight channel; one-way ANCOVA: p = 0.684).

Ants’ heading directions in cue conflict experiments with a directional change in either compass cue. The training situation is depicted in the sketches on the left (POL filter and grey arrow indicating the training direction). a Outcome of the experiment in a channel with a 90° bend and a constant e-vector pattern relative to the walking direction; b dependence of the heading directions (N = 45) normalized to the expected POL compass direction relative to the angular distance between sun and POL compass direction (as in Fig. 2c). c, d Results of the experiment with a 90° turn of the POL filter along a straight channel. The data (N = 53) are plotted with respect to the most likely of all four POL compass directions, i.e. the POL direction with the shortest angular distance to the data which not necessarily is the one with the shortest angular distance to the sun compass direction. Therefore, some heading directions are plotted against an angular distance between the sun and the POL compass direction larger than 45° (for further details, see Fig. 2)
The reciprocal experiment with a change of the e-vector pattern (90° turn of the e-vector orientation after half of the training distance; see sketch on the left of Fig. 4c) in a straight channel system is more difficult to interpret. Homing directions based on a uniform e-vector pattern are ambiguous due to the symmetry of the sky’s polarization pattern. Therefore, the 90°-turn of the POL filter orientation along the channel leads to a quadrimodal distribution of potential homing directions (for details of the argument see Lebhardt et al. 2012). Because of these four resulting POL compass directions very large conflicts between the POL compass and the sun compass direction cannot be achieved, the maximum theoretical angular distance is 45°. The results can again be described by a linear regression y = 0.51x − 3.08 (R 2 = 0.56, N = 53, Fig. 4d). A comparison of the slopes between this combined e-vector pattern with either uniform orthogonal or uniform parallel e-vector pattern revealed no significant difference (p = 0.045, one-way ANCOVA, with Dunnett’s multiple comparisons test: p = 0.133 and p = 0.998, respectively). Taken together, the results confirm the outcome of the experiments described in Fig. 2, indicating an equal contribution of the two compass systems, even if one of the two compasses was evidently unreliable, exhibiting a sudden change along a linear training excursion. Wystrach et al. (2013) report a backtracking behaviour in ants: zero vector ants that have been displaced chose a direction opposite to the path segment that they had most recently travelled. However, in the experiment shown in Fig. 4c, there was no indication that the more recent compass direction had a stronger influence on the homing direction.
Discussion
The azimuthal position of the sun and the sky’s pattern of polarized light provide the most prominent compass information in insects’ path integration. In nature, these directional cues are physically tightly associated. In the experiments reported here, ants were confronted with contradictory compass information, i.e. a single e-vector pattern disconnected from the actual position of the sun. In this artificial situation, the ants determined their homeward direction as an intermediate course, instead of relying exclusively on either the sun or the POL cue (Figs. 2, 3). The results of this cue conflict experiment indicated a roughly equal contribution of sun and POL compass in the computation of the home vector. Thus, the previously suggested dominance of the POL compass over the sun compass (Duelli and Wehner 1973; Wehner and Müller 2006) was not observed in the present experimental paradigm. The strong influence of the sun compass in the cue conflict experiments presented here becomes evident when we compare Fig. 3a, b. This kind of interaction between sun and POL compass in desert ants’ path integration was retained even if one of the compass cues presented was obviously less reliable, by indicating a sudden change in direction, relative to the other (Fig. 4).
There is, however, one important difference to the experimental set-up used by Wehner and Müller (2006). In their training situation, the ants could see a broad stripe of the celestial POL pattern, that is, an extended field combining many different e-vector directions. In contrast, in the present experiments, the ants saw a stripe with only a single e-vector orientation. This latter situation may have weakened the POL channel input and thereby strengthened the relative input of the sun compass to the path integration module. Interestingly, in bees and myrmicine ants, the sun appears to have a larger impact as compared to the POL pattern than in formicine ants like Cataglyphis (see p 50 in Duelli and Wehner 1973; p 445 in von Frisch 1965).
According to the symmetry and the resulting 180° ambiguity of POL information (Wehner 1994), in principle, the ants could choose between two possible POL compass directions, e.g. solar meridian or antisolar meridian in case of training with the orthogonal e-vector. When combined with the sun compass direction in the cue conflict situation this leads to four potential “intermediate” homing directions. But actually almost all of the tested ants exhibited a strong preference for homing courses calculated on the basis of the sun compass, indicating the actual nest direction, and the expected POL compass direction with the shortest angular distance (Fig. 2). Quite clearly, the ambiguity of the uniform e-vector pattern was reduced by the additional information from the sun’s position, and possibly also the spectral composition of light in different parts of the sky.
The data were well described by linear regressions, and the slopes ranging from 0.37 to 0.55 indicate similar weights of sun and POL compass. There was only one significant difference between slopes in the experiments with uniform orthogonal and parallel e-vectors orientation (Fig. 2a, e) which indicated a slight dominance of the POL compass when presented as an orthogonal e-vector pattern. This can be explained tentatively by the relative presence of orthogonal and parallel e-vectors in the entire POL pattern of the natural sky. Hence, a larger proportion of orthogonal e-vectors in the sky might have influenced the weighting in favour of the POL compass, leading to a decreased slope.
Note that the reported intermediate homing direction represents the homing courses of individual ants (highlighted by arrows in Fig. 2a, e) and is not the result of calculating averages over individuals which might have adhered to either one or the other of both compass cues. Thus individual ants computed the homing directions as an average of the directions resulting from the POL compass and the sun compass.
The homing paths were mainly performed as unitary, straight walks suggesting a direct comparison of the information provided by both compass systems. However, when ants were confronted with a large conflict at noon, when the sun is at high elevation and the sky’s POL pattern is less reliable, some ants trained with a parallel e-vector orientation and the nest direction in 180° walked in zigzags towards the fictive nest position in the open test field (Fig. 2k). In all other training situations or daytimes, this kind of behaviour was very rarely observed, i.e. the ants behaved naturally and completed their homebound runs in rather straight paths (Fig. 2j). A comparable zigzagging trajectory was observed and reported previously by Fent, in this case with an artificial parallel e-vector presented during homing (Fent 1986).
The direct sunlight and the polarized scattered sunlight are detected by different parts of the eye and are most likely processed separately in further stages (Wehner and Müller 2006). The present results indicate a direct interaction of sun and POL compass information. Hence, the hypothesis put forward by Wehner and Müller (Wehner and Müller 2006) that in desert ant’s path integration a combined value of sun and POL compass information might be determined which then can be recalled by either system is supported. However, there exist several putative stages along the projection onto the central complex at which information from both compasses can be compared and consolidated. For instance, Pfeiffer et al. described neurons of the anterior optical tubercle of the locust brain (TuTu1) which responded to both specific e-vector orientations and light spots of different wavelength at particular azimuth positions (Pfeiffer et al. 2005; Pfeiffer and Homberg 2007).
There are several recent reports indicating integration of different celestial and terrestrial directional cues which can lead to compromise directions in case of conflicting cues (e.g. Müller and Wehner 2007; Reid et al. 2011; Narendra et al. 2013; Kemfort and Towne 2013). However, there are also counter examples indicating a strict hierarchy: in a conflict situation between celestial and idiothetic cues, the latter were completely ignored (Lebhardt et al. 2012). Another example is the dominance of the POL compass over the wind compass (Müller and Wehner 2007). In general, an intermediate direction calculated from two conflicting compass cues, would appear to be adaptive as it prevents individuals from choosing the wrong direction (see Cheng et al. 2007). In case of a conflict between two approximately evenly important directional cues, such as the sun and the POL pattern, however, the ant cannot decide which one is the more reliable. Thus, facing uncertainty, the ant will more likely find the actual nest position if it takes into account both reference directions with similar weights. However, the described situation, a POL pattern extracted from the sun providing inconsistent directional information is extremely unlikely to occur in nature. It could tentatively be caused by a huge tree covering large parts of the sky, even though such kind of shielding structures rarely exist in the C. fortis habitat.
Apart from the two main celestial cues we considered here, there are additional cues providing directional information, wind direction, spectral composition of skylight, light intensity distribution, landmark panoramas, and possibly even magnetic cues (Wehner 1997; Müller and Wehner 2007; Buehlmann et al. 2012; Narendra et al. 2013), which implies that the animal could in principle be challenged by a diversity of conflicting directional information. Probably a mean direction is calculated when two cues are equally reliable.
References
Buehlmann C, Hansson BS, Knaden M (2012) Desert ants learn vibration and magnetic landmarks. PLoS One 7:e33117. doi:10.1371/journal.pone.0033117
Cheng K, Shettleworth SJ, Huttenlocher J, Rieser JJ (2007) Bayesian integration of spatial information. Psychol Bull 133:4. doi:10.1037/0033-2909.133.4.625
Collett M (2012) How navigational guidance systems are combined in a desert ant. Curr Biol 22:927–932. doi:10.1016/j.cub.2012.03.049
Deneve S, Pouget A (2004) Bayesian multisensory integration and cross-modal spatial links. J Physiol Paris 98:249–258. doi:10.1016/j.jphysparis.2004.03.011
Dovey KM, Kemfort JR, Towne WF (2013) The depth of the honeybee’s backup sun-compass systems. J Exp Biol 216:2129–2139. doi:10.1242/jeb.084160
Duelli P, Wehner R (1973) The spectral sensitivity of polarized-light orientation in Cataglyphis bicolor (Formicidae, Hymenoptera). J Comp Physiol 86:37–53. doi:10.1007/BF00694476
Dyer FC, Dickinson JA (1994) Development of sun compensation by honeybees—how partially experienced bees estimate the suns course. Proc Natl Acad Sci USA 91:4471–4474
Fent K (1986) Polarized skylight orientation in the desert ant Cataglyphis. J Comp Physiol A 158:145–150. doi:10.1007/BF01338557
Grah G, Wehner R, Ronacher B (2005) Path integration in a three-dimensional maze: ground distance estimation keeps desert ants Cataglyphis fortis on course. J Exp Biol 208:4005–4011. doi:10.1242/jeb.01873
Hammer Ø, Harper D, Ryan P (2001) PAST: paleontological statistics software package for education and data analysis. Palaeontol Electron 4:9
Heß D, Koch J, Ronacher B (2009) Desert ants do not rely on sky compass information for the perception of inclined path segments. J Exp Biol 212:1528–1534. doi:10.1242/jeb.027961
Kemfort JR, Towne WF (2013) Honeybees can learn the relationship between the solar ephemeris and a newly experienced landscape: a confirmation. J Exp Biol 216:3767–3771. doi:10.1242/jeb.086058
Labhart T, Meyer EP (1999) Detectors for polarized skylight in insects: a survey of ommatidial specializations in the dorsal rim area of the compound eye. Microsc Res Tech 47:368–379
Lebhardt F, Koch J, Ronacher B (2012) The polarization compass dominates over idiothetic cues in path integration of desert ants. J Exp Biol 215:526–535. doi:10.1242/jeb.060475
Lindauer M (1959) Angeborene und erlernte Komponenten in der Sonnenorientierung der Bienen - Bemerkungen und Versuche zu einer Mitteilung von Kalmus. Z vergl Physiol 42:43–62. doi:10.1007/BF00297689
Müller M, Wehner R (1988) Path integration in desert ants, Cataglyphis fortis. Proc Natl Acad Sci USA 85:5287–5290
Müller M, Wehner R (2007) Wind and sky as compass cues in desert ant navigation. Naturwissenschaften 94:589–594. doi:10.1007/s00114-007-0232-4
Narendra A, Gourmaud S, Zeil J (2013) Mapping the navigational knowledge of individually foraging ants Myrmecia croslandi. Proc R Soc B-Biol Sci 280(2013):20130683. doi:10.1098/rspb.2013.0683
Pfeiffer K, Homberg U (2007) Coding of azimuthal directions via time-compensated combination of celestial compass cues. Curr Biol 17:960–965. doi:10.1016/j.cub.2007.04.059
Pfeiffer K, Kinoshita M, Homberg U (2005) Polarization-sensitive and light-sensitive neurons in two parallel pathways passing through the anterior optic tubercle in the locust brain. J Neurophysiol 94:3903–3915. doi:10.1152/jn.00276.2005
Reid SF, Narendra A, Hemmi JM, Zeil J (2011) Polarised skylight and the landmark panorama provide night-active bull ants with compass information during route following. J Exp Biol 214:363–370. doi:10.1242/jeb.049338
Rossel S, Wehner R (1982) The bee’s map of the e-vector pattern in the sky. Proc Natl Acad Sci USA 79:4451–4455
Rossel S, Wehner R (1986) Polarization vision in bees. Nature 323:128–131
Santschi F (1911) Observations et remarques critiques sur le mechanisms de l’orientation chez les fourmis. Rev Suisse Zool 19:303–338
von Frisch K (1965) Tanzsprache und Orientierung der Bienen. Springer, Berlin, Heidelberg, New York
Wehner R (1994) The polarization-vision project: championing organismic biology. In: Schildberger K, Elsner N (eds) Neural basis of behavioural adaptations. Fortschritte der Zoologie 39. G. Fischer, Stuttgart, Jena, New York, pp 103–143
Wehner R (1997) The ant’s celestial compass system: spectral and polarization channels. In: Lehrer M (ed) Orientation and communication in arthropods. Birkhäuser Verlag, Basel, pp 145–185
Wehner R (2003) Desert ant navigation: how miniature brains solve complex tasks. J Comp Physiol A 189:579–588. doi:10.1007/s00359-003-0431-1
Wehner R, Labhart T (2006) Polarization vision. In: Warrant E, Nilsson DE (eds) Invertebrate Vision. Cambridge University Press, Cambridge, pp 291–347
Wehner R, Müller M (1993) How do ants acquire their celestial ephemeris function? Naturwissenschaften 80:331–333. doi:10.1007/BF01141909
Wehner R, Müller M (2006) The significance of direct sunlight and polarized skylight in the ant’s celestial system of navigation. Proc Natl Acad Sci USA 103:12575–12579. doi:10.1073/pnas.0604430103
Wehner R, Srinivasan M (2003) Path integration in insects. In: Jeffery KJ (ed) The neurobiology of spatial behaviour. Oxford University Press, Oxford, pp 9–30
Wehner R, Gallizzi K, Frei C, Vesely M (2002) Calibration processes in desert ant navigation: vector courses and systematic search. J Comp Physiol A 188:683–693. doi:10.1007/s00359-002-0340-8
Wittlinger M, Wehner R, Wolf H (2006) The ant odometer: stepping on stilts and stumps. Science 312:1965–1967. doi:10.1126/science.1126912
Wittlinger M, Wehner R, Wolf H (2007) The desert ant odometer: a stride integrator that accounts for stride length and walking speed. J Exp Biol 210:198–207. doi:10.1242/jeb.02657
Wystrach A, Schwarz S, Baniel A, Cheng K (2013) Backtracking behaviour in lost ants: an additional strategy in their navigational toolkit. Proc R Soc B-Biol Sci 280(2013):20131677. doi:10.1098/rspb.2013.1677
Acknowledgments
We thank Julja Koch for her help with the set-up and Jorge Jaramillo for helpful comments. In particular, we are grateful to Rüdiger Wehner for many discussions and his continuous support. Helpful comments from two anonymous referees are also acknowledged. We want to express our gratitude to the Tunisian government for kindly allowing us to carry out these investigations in this beautiful country. Financial support was provided by grants from the DFG (Ro 547/10-1) and the Volkswagen Foundation (I/78 574) to B.R. The experiments comply with the “Principles of Animal Care” and with the current German law.
Conflict of interest
The authors declare that they have no conflict of interests.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Lebhardt, F., Ronacher, B. Interactions of the polarization and the sun compass in path integration of desert ants. J Comp Physiol A 200, 711–720 (2014). https://doi.org/10.1007/s00359-013-0871-1
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00359-013-0871-1