
Abstract
Formicine ants are able to detect slopes in the substrates they crawl on. It was assumed that hair fields between the main segments of the body and between the proximal leg segments contribute to graviception which triggers a change of posture in response to substrate slopes. The sagittal kinematics of two ant species were investigated and compared on different slopes. Cataglyphis fortis, a North African desert ant, is well known for its extraordinary sense of orientation in texturally almost uniform habitats, while Formica pratensis, a common central-European species, primarily uses landmarks and pheromone traces for orientation. A comparison of these two species reveals differences in postural adaptations during inclined locomotion. Only minor slope-dependent angular adjustments were observed. The largest is a 25° head rotation for Cataglyphis, even if the slope is changed by 150°, suggesting dramatic changes in the field of vision. The trunk’s pitch adjustment towards the increasing slope is low in both species. On all slopes Cataglyphis achieves higher running speeds than Formica and displays greater slope-dependent variation in body height. This indicates different strategies for coping with changing slopes. These specific aspects have to be reflected in the ants’ respective mode of slope perception.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
The ability of Cataglyphis desert ants (Fig. 1a) to navigate in largely structureless, plane habitats is primarily a result of their solar compass (Wehner 2003), their step-counting odometer (Wittlinger et al. 2006), and their ability to compensate for inevitable mistakes along their convoluted food searching path (Müller and Wehner 1988; Wolf and Wehner 2005). It has been shown that inclined substrates do not affect their ability to correctly estimate distance to the nest (Wohlgemuth et al. 2001; Grah et al. 2005). For this feature no anatomical correlate has been found yet, but it seems that Cataglyphis desert ants use idiothetic mechanisms to estimate distances in their almost unstructured desert habitats. Similar mechanisms might be used to take substrate slopes into account.

Both species investigated in this study shown on level ground: a Cataglyphis fortis showing the typical erect gaster, b Formica pratensis. The bars in the lower right corners approximate 4 mm each
Formica pratensis (Fig. 1b) is a taxonomically related species, but in contrast to C. fortis it populates quite different habitats in meadows and shrubs of Central Europe. It orients itself almost exclusively by using landmarks and pheromone traces left on the substrate (Graham and Collett 2002; Fukushi and Wehner 2004). Landmark-based orientation with no recourse to celestial cues has already been demonstrated in the closely related species F. japonica (Fukushi and Wehner 2004). In richly structured habitats, that are also typical for F. pratensis, hundreds of landmarks are available for use in orientation and distance measurement.
Nevertheless, another related species, Formica polyctena, is able to orient itself solely by the means of graviception (Markl 1964). Hair fields in the joints between their body segments enable the detection of gravitational deflection and are essential for graviception. These hair fields may also be utilised to detect altered posture and kinematics in F. pratensis and C. fortis. The position and shape of the hair fields are very similar in the two species (Wittlinger, personal communication), but due to differences in their environments and owing to the resulting reliance on different orientational cues, the level of precision and specific characteristics of the hair fields may differ.
Inside the nests of Cataglyphis and Formica sensory stimuli that are used in the foraging habitat, such as the position of the sun, are obviously not available. Path-finding abilities inside the nest are probably based on proprioceptive cues and pheromone traces. Therefore, it seems likely that proprioceptive sensing mechanisms, such as graviception, are in regular demand and can also be used during foraging.
Literature on animals, particularly arthropods, walking on slopes is rare. When humans walk uphill, they bend their trunk slightly forwards in order to bring their centre of gravity above the new point of support. For the same reason they lean slightly backwards when walking downhill (Leroux et al. 2002). Medium-sized quadruped mammals such as cats align the long axis of their trunk parallel to the slope, but their legs remain almost vertical (Carlson-Kuhta et al. 1998; Smith et al. 1998) indicating an adjustment of the leg–trunk angle. In lizards two different strategies have been observed. Primarily terrestrial species lower their centre of mass and change their global leg angles both on ascents and descents (Jayne and Irschick 1999; Higham and Jayne 2004), while specialist climbers, such as chameleons and geckos, do not alter neither their clearance nor the orientation of their feet relative to the centre of mass at stance (Jayne and Irschick 1999; Zaaf et al. 2001; Higham and Jayne 2004; Autumn et al. 2006). Similarly, insects seem to alter the position of their legs relative to the body axis only to a minor degree during climbing (Cruse 1976; Goldman et al. 2006; Seidl and Wehner 2008). However, it has not been investigated yet, whether or not ants that are specifically adapted to different habitats display deviating strategies in mastering slopes.
In summary, both biomechanical and sensorial demands may cause species-specific kinematic differences. A kinematic analysis may allow conclusions to be drawn on which sensors are responsible for graviception. Depending on taxon and the different sensorial demands of specific environmental adaptation, it is hypothesised that predominantly terrestrial (Cataglyphis fortis) and predominantly scrambling (Formica pratensis) ants have different ways of adjusting their kinematics to different slopes, similar to the two strategies observed in lizards. Possibly these kinematic adjustments are used to evaluate the influence of substrate slope on the measurement of distance to the nest.
Approving aspects which are meaningful for the comparison of the two species are (1) their close kinship and resultant anatomical and sensorial similarities, and (2) their different environmental adaptations, potential species-specific slope-dependent adjustments, and the resultant kinematic differences. To test these differences we investigated the kinematics of the two species mastering different slopes by using video analysis in the sagittal plane.
Materials and methods
Formica pratensis was investigated using an established colony kept in the C.R. Taylor Motion Lab at the University of Jena during the first half of October. The animals were taken from a sample site characterised by groves and meadows in the hilly surroundings. Cataglyphis fortis was investigated using wild colonies in Maharès, Tunisia, during the second half of June. The investigated colonies of both species sent forth about 70 active foragers a day.
A four-segment aluminium channel (Fig. 2) with an adjustable segment slope connected the formicary with a forage site containing biscuit crumbs soaked with watermelon juice. In a narrowed section of one of the middle segments the aluminium wall was substituted by glass. Thus, movements could be captured with a high-speed camera (Redlake 2000S, 250 fps) in the sagittal plane. The field of vision was about 40 mm wide. Camera resolution was 480 × 480 pixels, so minimum tracking accuracy was below 0.1 mm. An accuracy of at least 0.05 mm can be assumed since the used software, WINAnalyze®, is able to compute sub-pixel resolutions via interpolating algorithms (Frischholz and Spinnler 1993). To avoid noise, a low-pass Butterworth filter with a cutoff frequency of 80 Hz was applied to the raw data. Prior to each recording series the setup was calibrated by structures made up of small LEGO® blocks (24.0 × 9.6 mm).

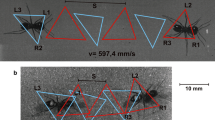
Experimental setup: adjustable ramp with observation window in the right leg
The floor of the channels was coated with sand or sandpaper in the narrowed part, in order to provide surface roughness. The walls of the channel were covered with Fluon™ to prevent escape. Crawling on different slopes was captured at similar times of day, similar channel orientation, and with constant lighting. The slopes φ ranged from −60° (descending) to +60° (ascending) in steps of 30° for both species. To account for the limits of postural adaptations, Cataglyphis was also tested on slopes of ±75° (n = 10), which is atypical for its habitat. Similar slopes were reached in recently published orientation experiments (Grah et al. 2005).
The number of digitised runs (Formica, n = 106; Cataglyphis, n = 89) varied for the different slopes in Formica from 17 to 28 and in Cataglyphis from 14 to 27. Only foraging runs starting from the nest of physically intact animals in windless situations were analysed. The animals did not carry food so load and motivational effects were omitted. Sequences with clearly deviating, i.e. curious, explorative or aggressive behaviour were rejected.
The following points were digitised in the high-speed films (WINAnalyze®, Mikromak): mandible, caput–alitrunk joint, petiolus–gaster joint, and the caudal end of the gaster (Fig. 3). The centre of mass position was assumed to be located at 1/8 thorax length (l T) from the hind rim of the alitrunk (Zollikofer 1994b). The following kinematic quantities were calculated from the digitised points using Matlab™ 6.5: the absolute (v abs) and the relative (v rel) velocity, the thorax length l T, the absolute (h abs) and the relative (h COM) body height, typical fluctuations of the centre of mass perpendicular to the substrate b, as well as the angles between substrate and alitrunk α, between head and thorax β, between head and substrate γ, between thorax and abdomen δ, and between abdomen and substrate ε.

Silhouette of Cataglyphis fortis with α (alitrunk–substrate angle), β (caput–alitrunk angle), γ (caput–substrate angle), δ (gaster–alitrunk angle), ε (gaster–substrate angle)
Locomotion speed is a major factor in ant kinematics (Zollikofer 1994b; Seidl and Wehner 2008), and different velocity ranges were observed for each different substrate slope (Fig. 4c; Table 1). In order to estimate rather the effect of the substrate slope than the effect of speed on a certain kinematic parameter (y abs), the significance of the linear slope in the particular velocity dependency was specified for each species and substrate slope. Significant velocity-dependent changes were found for a few parameters and slopes, but no regularity in the occurrence of these dependencies among the slopes could be identified.

a The caput–substrate angle changes with the slope of the substrate for both Cataglyphis (gray) and Formica (white). b Alitrunk–substrate angle α; c relative locomotion speed vrel; d relative body height perpendicular to the substrate hCOM
In order to avoid bias in the slope dependencies due to velocity effects the data were linearly corrected
using a constant Froude number Fr = 0.25 as reference value
with the gravitational acceleration g, the measured velocity values v abs, the slope of the regression line through y abs(v abs) a, and the reference velocity v ref determined for each substrate slope on the basis of the respective median value of the body height h abs(φ). This correction was applied only when a certain velocity-dependent slope a was significant. In this case, values y abs measured for a certain substrate slope at different velocities v abs were transformed to the respective corrected values y cor at the reference velocity v ref specific for this substrate slope.
The Froude number is a dimensionless velocity and therefore a suitable way for comparing animals of different sizes and even different biomechanical design (Alexander 1991; Ruina et al. 2005; Geyer et al. 2006). The value Fr = 0.25 was chosen to keep the reference velocities in the range of naturally attained running speeds. In both species the reference velocities v ref over all slopes were about 0.07 m s−1. This value is covered by the velocity ranges of nearly all substrate slopes. However, the reference velocities vary stronger in Cataglyphis due to its higher variability in h COM (see below).
Due to the distributional skewness of the data, non-parametric tests were carried out to investigate the effect of slope (non-parametric ANOVA, Kruskal–Wallis with Bonferroni post hoc test; pair-wise test, Man–Whitney U test). If not indicated explicitly significance is given on a level of P < 0.05. Data, primarily obtained from kinematics in the horizontal plane, are not considered in the results of this paper. Step frequency, duty factor, and other spatio-temporal parameters were already published in a parallel cooperative project led by Seidl and Wehner (2008).
Results
In both species segment angle adjustments, if observed, are low compared to the changes in slope. Consequently, the differences in substrate slopes are not compensated by corresponding angular changes with regard to gravity. This is also true for shallow slopes. Most parameters of Formica saturate, at least on ascents and descents between 30° and 60°. Pronounced adjustments only occur in the height adaptation of the centre of mass in Cataglyphis. The slope-dependent clearance of this species changes a lot more than that of Formica.
Speed (v)
Running speed depends on the slope (Fig. 4c; Table 1). Within ±60° both the absolute speeds v abs and the relative speeds v rel = v abs/l T (Formica: l T = 3.15 ± 0.25 mm, Cataglyphis: l T = 3.73 ± 0.24 mm) of locomotion are significantly (P < 0.01) higher in Cataglyphis than in Formica. The median values range from 31.7 l T s−1 at +60° to 68.4 l T s−1 at +30° in Cataglyphis and from 24.4 l T s−1 at +60° to 35.7 l T s−1 at 0° in Formica. Both species slow down appreciably when running up the steepest slopes. In Formica, only the value at +60° differs significantly from those observed on other slopes. In Cataglyphis the dependency varies. On level ground this species tends towards lower speeds (skewness: +0.68). The values at +75° and +60° lie significantly below the values for all other slopes, but differ from each other. Downwards (−30°, −60°), the median speed tends to increase in Cataglyphis to up to 66.5 l T s−1. Only on the steepest descent the velocity decreases to a value below the one that was observed on level ground. On slight to medium ascents (+30°) locomotion velocity in Cataglyphis increases. Velocity tends to decrease in Formica in both increasing and decreasing slopes.
Body height (h COM) and its oscillations (b)
On level ground the relative body heights of the two species (Figs. 4d, 5; Table 1) are in a similar range, although the leg lengths normalised to l T differ considerably. Estimated from Wehner and Sommer (personal communication), and Zollikofer (1994a) C. fortis has legs that are approx. 1.5 times longer then those of Formica. However, height differences are significant on all slopes. In Formica, the medians range from 0.55 l T at +60° to 0.59 l T at 0°, indicating almost no slope-dependent changes. Cataglyphis, on the other hand, clearly reduces body height on intermediate slopes (±30° and ±60°; Fig. 4d; Table 1). Despite its longer legs, its normalised body height then is lower as in Formica. On the steepest slopes (±75°) the centre of mass is elevated again (range 0.26 l T at +60°; 0.74 l T at 0°). At +75° values are similar to those at +30° and at −75° even values similar to 0° are reached. Consequently, in Cataglyphis a more pronounced height adjustment can be observed.

Median posture of ants while walking on different slopes. Left and top middle (a, b): Cataglyphis; right and bottom middle (c, d): Formica. Left and right (a, d): with slopes; middle (b, c): posture relative to the walking surface. The centre of mass is represented by red circles. Slopes 0° solid black, +30° dashed blue, +60° dashed cyan, −30° solid red, −60° solid yellow (colour figure online)
The oscillation of the centre of mass perpendicular to the substrate differs slightly in the two species (Table 1). In Formica typical oscillation values range from 0.04 l T to 0.06 l T with no significant changes between the substrate slopes. On steeper slopes the oscillations seem to increase. In Cataglyphis oscillation amplitudes adapt to steeper slopes, but only oscillation values at steep slopes (−75° and +60°) differ significantly from level values. The highest amplitudes are reached at −75° while the oscillations at +75° are similar to those on shallow slopes. Both species reach amplitudes of the same magnitude. When it comes to descents, oscillations are significantly higher in Formica.
Angles (α, β, γ, δ, ε)
In general segment angles follow the slope of the substrate with minor adaptations (e.g. alitrunk–substrate angle α; Figs. 4b, 5; Table 1). The alitrunk–substrate angle (median at 0°; Formica 16°, Cataglyphis 24°) is slightly reduced in Formica during ascents (14°) and significantly increased (26°) on descents. While slope dependency in Formica displays a roughly sigmoid shape no such pattern is observed in Cataglyphis, where the values are similar for most slopes, except +30° and +75° which are significantly lower than all the other values. All adjustments are virtually negligible compared to the angular changes in the substrate. Significant differences between the species occur at 0° and ±60°.
Further adjustments may occur in the caput–alitrunk joint (angle β; Table 1). This joint adapts to slope changes almost continually. In both species this adaptation has a roughly sigmoid character. The differences of the median values do not exceed 25° in the tested range of slopes. The angle of the caput with respect to the substrate is γ = 180°− α − β. Here, too, slope adjustment seems to be sigmoid, but the angle comprised is about 30° (Fig. 4a). Levelling off occurs in Formica at ±30°, in Cataglyphis at ±60°. The caput–substrate angle changes from high values at +60° (44° Cataglyphis) and +30° (46° Formica) to low values at −60° (22° Cataglyphis; 17° Formica). Reacting to decreasing slopes the caput is held increasingly parallel to the substrate.
In both species the gaster orientation relative to the alitrunk (δ) is almost constant (Table 1). In Formica this angle decreases slightly on lower slopes. At −30°, as an exception, the angle is significantly higher (161°) than on most of the other slopes (−60°, 0°, +30°). Here the distal gaster tip often touches the substrate passively widening the angle. In Cataglyphis a clear exception occurs at 0° where the angle δ = 233° is significantly (P < 0.001) higher than on all other slopes. In level locomotion the range covered by the other slopes is clearly exceeded. On these slopes angles from 207° (+75°) to 220° (−75°) are reached (Table 1). In Formica the gaster (ε = δ − α − 180°) always points towards the substrate whereas in Cataglyphis it points away. In Cataglyphis the slope dependency of the gaster–substrate angle matches that of the gaster–alitrunk angle δ. Accordingly ε = 30.5° (P ≤ 0.02) is exceptionally high on level ground. Otherwise the values are almost constant, ranging between 11° (+75°) and 21° (−75°). In Formica the slope-dependent adjustment of the gaster angle is small, the median values range from −38° (+60°) to −53° (−60°). The values at −60° differ from all other slopes (P < 0.01). The difference between +60° and −30° is also significant.
Discussion
While walking on different slopes, the species examined (C. fortis, F. pratensis) only make minor postural changes. Despite differences in morphology, and in particular the greater leg length in Cataglyphis, kinematics is surprisingly similar in the two species. According to Seidl and Wehner (2008), spatio-temporal parameters such as phase shift between individual legs and duty factor are fairly constant over all slopes. Both species use a tripod gait in which stance phases are slightly longer than swing phases. The running speeds reached by Cataglyphis are higher on all slopes. Apart from this, the following differences in sagittal kinematics are substantial:
-
greater slope-dependent variation in body height in Cataglyphis compared to Formica;
-
the degree to which the gaster is raised in Cataglyphis as compared to the gaster in Formica, that points towards the substrate in a fairly fixed position.
Assuming that locomotion velocity is a measure of biomechanical adaptation to slope and specific substrate, e.g. the degree of static stability (see below), it can be concluded that Cataglyphis and Formica use different strategies (Seidl and Wehner 2008). Reduced running speed on steep ascents might be an energy saving strategy since increasing speed raises energy consumption on inclines (Full and Tullis 1990). Wohlgemuth et al. (2002) demonstrated lower velocities in Cataglyphis on inclines and declines. But they investigated only home bound runs of specimens loaded by carrying pieces of food differing in weight and size. Hence, their results cannot reasonably be compared with our findings. The presence of food presumably significantly affected both the position of the centre of mass and the motivation of the ants to move at speed.
Adjustment of body height (h COM)
On level ground, clearance in Cataglyphis is not much higher than in Formica. In particular on moderate slopes the height of the centre of mass is significantly smaller in Cataglyphis. The more pronounced slope-dependent changes in Cataglyphis may indicate that the animals are less adapted to climbing on inclined substrates than Formica.
In the sandy and at least in part structurally unstable substrate of the typical desert habitats of Cataglyphis, clinging with claws or even wet adhesion via adhesive pads is barely useful. It is likely that the ants attempt to keep their centre of mass inside the supporting polygon in order to avoid instabilities when surmounting slopes. At least on gentle slopes the best strategy for achieving this is to lower the clearance. Elongating the legs to increase abduction would also cause an increase in the supporting polygon. In fact, Cataglyphis does not use this strategy (Seidl and Wehner 2008), since it is much less effective. Furthermore, the height adjustment allows the odometer to remain unaffected, as it is based on constant step length (Wittlinger et al. 2007a).
In Formica lowering the centre of mass is limited by the gaster. Its position causes the caudal tip to touch the substrate during level locomotion (Figs. 1b, 5c, d). The gaster of Cataglyphis points upwards, thus permitting greater range of height adjustments. Cataglyphis makes use of the strategy to lower its centre of mass significantly below level values on small and moderate slopes in particular, but re-increases its body height on steeper slopes.
Lizard species also adopt a rather crouched posture during locomotion which is considered, among others, to be an adaptation to climbing. The chameleon Chamaeleo calyptratus does not change its body height in relation to the ground (clearance) neither when moving uphill nor when moving downhill (±30°). In contrast, the mainly ground-dwelling species Dipsosaurus dorsalis significantly reduces clearance in both cases (Jayne and Irschick 1999; Higham and Jayne 2004). These differences may be related to differences with respect to substrate contact. Similarities are observed in the two ant species investigated here.
The unexpected increase of clearance in Cataglyphis at higher slopes may be related to the limited ability to cling onto the substrate. With respect to the climbing direction on rough substrate the generation of friction by means of claws is limited in the lower legs, whereas that of the upper legs can be assumed as being uncritical. For details considering the use of claws in ants and other insects see for instance (Larsen et al. 1995; Frazier et al. 1999; Dai et al. 2002; Frantsevich and Gorb 2004; Ridgel and Ritzmann 2005; Clemente and Federle 2008; Endlein and Federle 2008).
The limited friction of the lower legs can be increased by higher clearance. If the lower legs are considered to be the counter-bearing of a pendulum, consisting of the centre of mass pivoting around the point of attachment of the upper limbs, an increase in body height results in higher normal forces (Load) on the tarsi of the lower legs. Since critical friction results from F friction = μ S · Load with the critical friction coefficient μ S being a material constant, the critical friction increases as well (Cartmill 1985). Presumably, this comes at the cost of reduced normal forces on the upper appendages (Günther and Weihmann 2009). However, with given friction coefficients starting at a certain slope, this is the only way to generate thrust with the lower legs. Indeed, Cataglyphis re-increases its clearance after a minimum of 0.26 l T at +60° to 0.52 l T at +75° (P < 0.001; Table 1; Fig. 3d).
Moving downhill, the ants significantly reduce their body height already at slopes of −30° (P < 0.001). As slopes decrease further, they gradually re-increase the clearance. During steep descents, Cataglyphis mostly brachiates down on its hind legs (upper legs in this case) utilising its claws and using the forelegs to strut on the substrate. The steep orientation of the foreleg axes causes a maximum dorsal flexion of the loaded tarsal claws. In this position the terminal tarsomere provides a definite block (Endlein and Federle 2008) which may allow the foreleg claws to contribute to breaking forces. The high clearance at steep descents (Fig. 4d) results in a steeper orientation in the distal segments of the hind legs. This may result in a steep angle of attack of the claws using the lowest curve radius at their tips for contact with the substrate, thus friction is optimized (Dai et al. 2002).
Like chameleons, Formica is usually not limited in its ability to generate friction forces within its natural habitat (Gladun and Gorb 2007) and shows almost no kinematic adaptation to changing slopes. Even on marginal slopes these ants apparently use the laterally directed reaction forces (Reinhardt et al. 2009) typical for vertical climbing in geckos and cockroaches (Autumn et al. 2006; Goldman et al. 2006) in order to seek strong adhesion while clamping their legs against each other. This strategy guaranties secure ground contact in all situations and makes slope-dependent postural adaptations dispensable. The relative and absolute velocities of Formica observed in this study are much lower than those of Cataglyphis. Accordingly, the increased stance durations give them sufficient time to achieve and break firmer attachments (Larsen et al. 1995; Federle and Endlein 2004). To improve the evidence for this conclusion reaction forces on slopes need to be measured in more detail.
Slope-dependent changes in the fluctuations of the centre of mass perpendicular to the substrate (Table 1) probably result from changing strategies of using the tarsi and adapting the body height. Furthermore, both species stumble more often on higher slopes. That may also increase the amplitudes of the centre of mass.
In conclusion, the differences in height adjustment in C. fortis and F. pratensis seem to be determined by differences in morphology related to substrate contact.
Adjustment of angles and field of vision
Both Cataglyphis and Formica moderately adjust their body segments to different slopes. For instance, the pitch adjustment of the thorax to the increasing slope is small and does not exceed 24°. Thus, ants keep their body largely parallel to the substrate, just like other climbing animals (Cruse 1976; Carlson-Kuhta et al. 1998; Higham and Jayne 2004).
It is conceivable that the ants strive to maintain their visual field and the mapping of the polarisation vectors. Indeed a systematic correction of head posture is observed (Formica 30°; Cataglyphis 25°). However, this change is still small compared to the change in slope (120° and 150°) and not sufficient to stabilise the sky segment. One possible slope sensor is the proprioceptive hair field complex on the neck (Markl 1964). The change in the observed sky segment might itself be taken as a correction signal, but as inside the nest all slope perception relies on proprioceptive cues, the animals should also be able to use such cues in an illuminated environment and may not depend on skylight vision to detect substrate slopes at all. Despite this, the systematic sigmoid adjustment of the head requires information about the substrate angle.
Position of the gaster
The erect position of the gaster has been considered a typical attribute of C. fortis (Wittlinger et al. 2007b). It was assumed that the erect position was related to an increased manoeuvrability. In the present study we demonstrate that under almost natural conditions the normal position of the gaster relative to the substrate is almost flat on all slopes. The high level of variability (Table 1) indicates that more or less pronounced erection may occur on all slopes. In fact, particularly on level ground, a heavily bent gaster was identified in some trials. In these sequences the animals always seemed to be curious or alarmed. Gaster erection seems to occur during explorative behaviour, but not in normal target-oriented locomotion. However, the few trials with a largely erect gaster, representing aggressive or curious episodes, were excluded from our analysis (see “Methods”). Runs on level ground might not be as target-oriented as the presumably more energy-intensive inclined runs (Full and Tullis 1990; Snyder and Carello 2008) and may thus be accompanied by an erect gaster more frequently (Table 1; Fig. 5b).
As mentioned above in Formica the normal position of the gaster causes its caudal tip to contact the substrate even during level locomotion (Figs. 1b, 5c, d). Since orientation and communication in this genus strongly depends on pheromone traces (Hölldobler 1995), the typical tracing behaviour forces the gaster to point to the ground.
Relevance with respect to slope perception
It has been demonstrated that ants are highly capable of detecting substrate slopes (Markl 1964) and that desert ants of the genus Cataglyphis use this information for reckoning the correct distance to their nests (Wohlgemuth et al. 2001, 2002; Grah et al. 2005; Wittlinger et al. 2007b). The results obtained by Markl (1964) suggest that there is no unique sensor for the detection of substrate slopes in hymenoptera but that sensors between the various body segments, on the antennae, and between the alitrunk and the coxae cooperate with each other. However, Markl proposed that the hair fields located at these joints may not be the actual sensor elements but that their function is to permit the ants to keep the angular configuration of their body segments almost constant.
Similarly, we argue here, that adjustment of body height to the slope requires its sensation. Neither clearance nor changes in joint angles are used as a measure for the slope. The relatively pronounced slope-dependent adjustments of body height in Cataglyphis amount to less than 0.5 l T. Based on anatomical data (estimated from Zollikofer 1994a) and the adopted posture a change in the femur–tibia angle of about 10° can be estimated during this adjustment. In contrast, the respective femur–substrate angle alters by about 30°. This femur deflection is transmitted to the proximal joints (trunk–coxa, coxa–trochanter), possibly sensed by hair fields and may be taken into account in the determination of ground distance when travelling over hills.
Much more plausible with respect to slope detection is the use of “stress gauges” in the muscles (Markl 1964) which in turn are activated to maintain posture at the different slopes. Related feedback loops might include campaniform sensillae, the strain detectors in cuticular structures. Specialised groups of these sensors concentrated in the trochanter allow cockroaches to detect the directions of external and internal forces (Zill et al. 2004; Kaliyamoorthy et al. 2005); hence, they possibly also provide the direction of the gravity vector.
In principle also gravity-induced deflection of the gaster with respect to the alitrunk could be perceived and used to measure inclination. Markl (1964) showed that disabling single sensor complexes by gluing segments together and even cutting off the gaster has little impact on the graviception of F. polyctena. However, gluing the petiolus and gaster joints in a rotated position causes permanent afferent deviations. In this situation the slope perception is strongly impaired. It has also been shown that a dorsal fixation of the gaster onto the thorax can reduce the perceived walking distance significantly (Wittlinger et al. 2007b). However, behavioural fixation experiments remained inconclusive.
As the arrangement and size of the hair plates are very similar in Formica and Cataglyphis (Wittlinger, personal communication) a comparison between experiments carried out by Markl (1964) and Wittlinger et al. (2007b) is permitted. In Wittlinger’s experiments the gaster is bent anteriad and glued dorsally onto the alitrunk. Not only does this affect the joints between alitrunk and gaster, it also shifts the centre of mass upward and forward and causes erroneous afferent signals in the coxal joints. This causes a disturbance in the majority of the slope sensors including campaniform sensillae in the legs, which makes it potentially impossible to calculate the real slope. As slope ratio is necessary information to assess the projected distance correctly, the insects are unable to estimate the distance they have to cover in order to reach the nest on level ground.
In short, all slope-dependent complex postural adaptations within the body seem to be primarily caused by the mechanical properties of the ants, e.g., foot anatomy or leg length. These properties, in turn, are adjusted to external conditions, such as substrate roughness or hardness, typical of the specific habitats.
Abbreviations
- φ :
-
Slope of the substrate
- v abs :
-
Speed parallel to the substrate
- l T :
-
Individual length of the alitrunk (thorax)
- v rel = v abs/l T :
-
Relative speed
- h abs :
-
Perpendicular distance between substrate and centre of mass (body height)
- h COM = h abs/l T :
-
Relative distance between substrate and centre of mass
- b :
-
Typical fluctuation of the centre of mass perpendicular to the substrate
- α :
-
Angle between substrate and alitrunk axis
- β :
-
Angle between caput (head) and alitrunk
- γ :
-
Angle between caput and substrate
- δ :
-
Angle between alitrunk and gaster (abdomen)
- ε :
-
Angle between gaster and substrate
- g :
-
Gravitational acceleration
References
Alexander R (1991) Energy-saving mechanisms in walking and running. J Exp Biol 160:55–69
Autumn K, Hsieh ST, Dudek DM, Chen J, Chitaphan C, Full RJ (2006) Dynamics of geckos running vertically. J Exp Biol 209:260–272
Carlson-Kuhta P, Trank TV, Smith JL (1998) Forms of forward quadrupedal locomotion. II. A comparison of posture, hindlimb kinematics, and motor patterns for upslope and level walking. J Neurophysiol 79:1687–1701
Cartmill M (1985) Climbing. In: Hildebrand M, Bramble DM, Liem KF, Wake DB (eds) Functional vertebrate morphology. Harvard University Press, Cambridge, pp 73–88
Clemente CJ, Federle W (2008) Pushing versus pulling: division of labour between tarsal attachment pads in cockroaches. Proc Biol Sci 275:1329–1336
Cruse H (1976) The function of the legs in the free walking stick insect, Carausius morosus. J Comp Physiol A 112:235–262
Dai Z, Gorb SN, Schwarz U (2002) Roughness-dependent friction force of the tarsal claw system in the beetle Pachnoda marginata (Coleoptera, Scarabaeidae). J Exp Biol 205:2479–2488
Endlein T, Federle W (2008) Walking on smooth or rough ground: passive control of pretarsal attachment in ants. J Comp Physiol A 194:49–60
Federle W, Endlein T (2004) Locomotion and adhesion: dynamic control of adhesive surface contact in ants. Arthropod Struct Dev 33:67–75
Frantsevich L, Gorb S (2004) Structure and mechanics of the tarsal chain in the hornet, Vespa crabro (hymenoptera: vespidae): implications on the attachment mechanism. Arthropod Struct Dev 33:77–89
Frazier SF, Larsen GS, Neff D, Quimby L, Carney M, DiCaprio RA, Zill SN (1999) Elasticity and movements of the cockroach tarsus in walking. J Comp Physiol A 185:157–172
Frischholz RW, Spinnler KP (1993) A class of algorithms for real-time subpixel registration. Proc SPIE 1989:50–59. doi:10.1117/12.164889
Fukushi T, Wehner R (2004) Navigation in wood ants Formica japonica: context dependent use of landmarks. J Exp Biol 207:3431–3439
Full R, Tullis A (1990) Energetics of ascent: insects on inclines. J Exp Biol 149:307–317
Geyer H, Seyfarth A, Blickhan R (2006) Compliant leg behaviour explains basic dynamics of walking and running. Proc Biol Sci 273:2861–2867
Gladun D, Gorb S (2007) Insect walking techniques on thin stems. Arthropod Plant Interact 1:77–91
Goldman DI, Chen TS, Dudek DM, Full RJ (2006) Dynamics of rapid vertical climbing in cockroaches reveals a template. J Exp Biol 209:2990–3000
Grah G, Wehner R, Ronacher B (2005) Path integration in a three-dimensional maze: ground distance estimation keeps desert ants Cataglyphis fortis on course. J Exp Biol 208:4005–4011
Graham P, Collett TS (2002) View-based navigation in insects: how wood ants (Formica rufa L.) look at and are guided by extended landmarks. J Exp Biol 205:2499–2509
Günther M, Weihmann T (2009) The load distribution among three legs on the wall-model predictions. J Math Biol (submitted)
Higham TE, Jayne BC (2004) Locomotion of lizards on inclines and perches: hindlimb kinematics of an arboreal specialist and a terrestrial generalist. J Exp Biol 207:233–248
Hölldobler B (1995) The chemistry of social regulation: multicomponent signals in ant societies. PNAS USA 92:19–22
Jayne BC, Irschick DJ (1999) Effects of incline and speed on the three-dimensional hindlimb kinematics of a generalized iguanian lizard (Dipsosaurus dorsalis). J Exp Biol 202:143–159
Kaliyamoorthy S, Quinn RD, Zill SN (2005) Force sensors in hexapod locomotion. Int J Robot Res 24:563–574
Larsen GS, Frazier SF, Fish SE, Zill SN (1995) Effects of load inversion in cockroach walking. J Comp Physiol A 176:229–238
Leroux A, Fung J, Barbeau H (2002) Postural adaptation to walking on inclined surfaces: I. Normal strategies. Gait Posture 15:64–74
Markl H (1964) Geomenotaktische Fehlorientierung bei Formica polyctena FÖRSTER. Z Vergl Physiol 48:552–586
Müller M, Wehner R (1988) Path integration in desert ants, Cataglyphis fortis. PNAS USA 85:5287–5290
Reinhardt L, Weihmann T, Blickhan R (2009) Dynamics and kinematics of ant locomotion: do wood ants climb on level surfaces? J Exp Biol 212:2426–2435
Ridgel AL, Ritzmann RE (2005) Insights into age-related locomotor declines from studies of insects. Ageing Res Rev 4:23–39
Ruina A, Bertram JE, Srinivasan M (2005) A collisional model of the energetic cost of support work qualitatively explains leg sequencing in walking and galloping, pseudo-elastic leg behavior in running and the walk-to-run transition. J Theor Biol 237:170–192
Seidl T, Wehner R (2008) Walking on inclines: how do desert ants monitor slope and step length. Front Zool 5:8
Smith JL, Carlson-Kuhta P, Trank TV (1998) Forms of forward quadrupedal locomotion. III. A comparison of posture, hindlimb kinematics, and motor patterns for downslope and level walking. J Neurophysiol 79:1702–1716
Snyder GK, Carello CA (2008) Body mass and the energy efficiency of locomotion: lessons from incline running. Comp Biochem Physiol A Mol Integr Physiol 150:144–150
Wehner R (2003) Desert ant navigation: how miniature brains solve complex tasks. J Comp Physiol A 189:579–588
Wittlinger M, Wehner R, Wolf H (2006) The ant odometer: stepping on stilts and stumps. Science 312:1965–1967
Wittlinger M, Wehner R, Wolf H (2007a) The desert ant odometer: a stride integrator that accounts for stride length and walking speed. J Exp Biol 210:198–207
Wittlinger M, Wolf H, Wehner R (2007b) Hair plate mechanoreceptors associated with body segments are not necessary for three-dimensional path integration in desert ants, Cataglyphis fortis. J Exp Biol 210:375–382
Wohlgemuth S, Ronacher B, Wehner R (2001) Ant odometry in the third dimension. Nature 411:795–798
Wohlgemuth S, Ronacher B, Wehner R (2002) Distance estimation in the third dimension in desert ants. J Comp Physiol A 188:273–281
Wolf H, Wehner R (2005) Desert ants compensate for navigation uncertainty. J Exp Biol 208:4223–4230
Zaaf A, van Damme R, Herrel A, Aerts P (2001) Spatio-temporal gait characteristics of level and vertical locomotion in a ground-dwelling and a climbing gecko. J Exp Biol 204:1233–1246
Zill S, Schmitz J, Büschges A (2004) Load sensing and control of posture and locomotion. Arthropod Struct Dev 33:273–286
Zollikofer C (1994a) Stepping patterns in ants II. Influence of body morphology. J Exp Biol 192:107–118
Zollikofer C (1994b) Stepping patterns in ants I. Influence of speed and curvature. J Exp Biol 192:95–106
Acknowledgments
We would like to thank Harald Wolf for lending us his camera, Tobias Seidl and Matthias Wittlinger for help with field work and technical support, Susanne Lipfert, Christian Rode, Silvia Henze, Michael Günther and Rolf Beutel for proofreading and valuable suggestions. We are indebted to Rüdiger Wehner, who directed our attention to the wide and extraordinarily interesting world of ants. This study was funded by the Volkswagen Stiftung (I/78 578).
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Weihmann, T., Blickhan, R. Comparing inclined locomotion in a ground-living and a climbing ant species: sagittal plane kinematics. J Comp Physiol A 195, 1011–1020 (2009). https://doi.org/10.1007/s00359-009-0475-y
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00359-009-0475-y