
Abstract
This investigation compared the application and accuracy of single- and multi-time-delay linear stochastic estimation-proper orthogonal decomposition (LSE-POD) methods in the temporal domain. These methods were considered for low-dimensional estimations of the dynamics of the energy-containing structures in a high Reynolds number flow. The near wake dynamics of a bluff body were used to demonstrate the robustness and accuracy of the investigated LSE-POD methods. Statistically independent two-dimensional particle image velocimetry (PIV) measurements were used to determine spatial POD modes, and time-resolved surface pressure measurements were used to determine LSE coefficients required for estimating the time-varying POD coefficients. A low-order, time-resolved reconstruction of the wake dynamics was accomplished using these estimated time-varying POD coefficients. The paper also provides details concerning the accuracy of the estimation using multi-time-delay LSE-POD. The results demonstrate that the multi-time LSE-POD technique is successful in capturing and reconstructing the important near wake dynamics. It is also shown that optimizing the time delays used for the estimations increases the accuracy of the reconstruction. As a result of its capabilities, the multi-time-delay implementation of the LSE-POD approach offers an alternate method for low-dimensional modeling that is attractive for real-time flow estimation.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
Capturing the dynamics of a high Reynolds number, unsteady flow requires resolving a wide range of spatial and temporal scales. This information is critical to the understanding of unsteady flows and can significantly impact the design of practical fluid systems. Such measurements are challenging, however, and sometimes, the available instrumentation cannot resolve the flow both temporally and spatially, since some unsteady flows have very small time scales.
The wake of a bluff body is a flow example, where understanding the dynamics is critical. The dynamics of the wake are linked to the base drag on the body, and therefore, resolving the wake dynamics is critical to understanding and modifying these flows. The wake dynamics are dominated by vortex shedding from the base region, a large-scale unsteady motion in the wake. However, in high Reynolds number flows, smaller scale fluctuations can obscure the large-scale structures. Therefore, an approach is required that can both capture and isolate the important dynamics of the wake.
Performing temporally and spatially resolved measurements in a region of the flow is a means of capturing a flow’s dynamics. An alternative approach using data that are not completely resolved in space and time is the linear stochastic estimation-proper orthogonal decomposition (LSE-POD) complementary technique. In this study, the data obtained included temporally resolved measurements at a limited number of locations and spatially resolved measurements at a limited number of uncorrelated times.
Exactly how to implement the LSE-POD approach depends on the flow being studied and the data available. Investigators have used various implementations to describe different turbulent flows: a shear layer (e.g., Bonnet et al. 1994), flow in a cavity (e.g., Ukeiley and Murray 2005), and jet flows (e.g., Ewing and Citriniti 1997; Tinney et al. 2006). For this near wake flow study, particle image velocimetry (PIV) results analyzed with POD provided a modal description of the velocity flow field, and, using this modal description along with time-resolved pressure measurements, LSE yielded an estimate of the behavior of these POD modes. The objectives of this study were to investigate single- and multi-time LSE-POD implementations in the temporal domain and to optimize their estimation of the large-scale dynamics of the wake flow. The multi-time-delay LSE-POD approach was implemented in the time domain in contrast to the frequency-domain approach used in earlier studies (Ewing and Citriniti 1997; Tinney et al. 2006), since it was the most straightforward approach for the data obtained in this study. Using an optimum time-delay range, the multi-time-delay approach successfully captured the important near wake dynamics.
Estimation performed using the multi-time LSE-POD approach implemented in the temporal domain has several benefits over the single-time approach. First, it removes the necessity of knowing the time-lag required for estimating the different POD modes in flows with convecting structure. Even when the optimum lag is known, the multi-time-delay approach still performs better (Durgesh and Naughton 2007). The time-domain approach also has advantages over frequency-domain implementations in certain applications. For example, when real-time estimation is required, such as in flow control applications, the time-domain implementation is often more efficient because it eliminates the need to Fourier transform the signals used for the estimation.
The paper includes a discussion of stochastic estimation, POD, and the LSE-POD complementary technique followed by a description of the experimental setup for measurements in the near wake. Subsequent application of the LSE-POD approach to the near wake flow allows for assessment of the performance and accuracy of the single- and multi-time-delay approaches. Finally, the flow is reconstructed using LSE-POD with an optimum time-delay range for the near-wake flow.
2 Background
2.1 Stochastic estimation
The stochastic estimation approach has been continuously refined and developed since its introduction in the field of turbulence by Adrian (1977, 1979) and Adrian et al. (1989). A study of isotropic turbulent flows showed that the mean square estimate of the velocity field at a location x + r and at time t was the average of the conditional probability of velocity location x and time t. They also showed that conditional averages of the turbulent flow quantities could be approximated in terms of unconditional data using stochastic estimation. They concluded that linear stochastic estimation (LSE) could be used to expose the coherent structures in turbulent flows. Since then, both linear and nonlinear stochastic estimation have been successfully used in various types of turbulent flows that include the axisymmetric shear layer (e.g., Ewing and Citriniti 1997), the mixing layer (e.g., Cole et al. 1992), the turbulent boundary layer (e.g., Guezennec 1989), the flow over an airfoil (e.g., Ausseur et al. 2007), and the flow in a cavity (e.g., Ukeiley and Murray 2005; Murray and Ukeiley 2007). Closed-loop control using stochastic estimation has also been considered (e.g., Pinier et al. 2007; Ukeiley et al. 2008).
Stochastic estimation can be implemented using information from the same time as when the estimation is desired or from information obtained at other times. Some investigators used a time offset in their LSE formulation (Guezennec 1989; Naguib et al. 2001), whereas others formulated the multi-time approach in the frequency domain (Ewing and Citriniti 1997; Tinney et al. 2006). In one study, the investigators used a multi-time approach in the temporal domain that estimated pressure in a cavity from pressure measurements made at earlier times (Ukeiley et al. 2008). The present study used a multi-time approach implemented in the time domain that was selected, as discussed previously, based on the data available and the nature of the flow. This approach is referred to as the multi-time-delay LSE-POD approach for which a detailed description is provided in Sect. 3.2.
2.2 Proper orthogonal decomposition
Advancements in instrumentation have led to the development of high-spatial-resolution velocity field measurements. Used with POD, these measurements can yield optimal basis functions for a given flow field. Lumley introduced POD to the field of turbulence (Lumley 1967), where he applied it to the identification of large eddies in the flow. Several references provide a detailed mathematical description of POD (e.g., Lumley 1967; Sirovich 1987; Berkooz et al. 1993; Holmes et al. 1996). The optimal basis functions determined using POD can be combined to identify large scale structures in turbulent flows. POD has therefore been used to understand the coherent structures in various turbulent flows including axisymmetric jets (e.g., Glauser and George 1987; Citriniti and George 2000), shear layers (e.g., Bonnet et al. 1996; Delville et al. 1999), axisymmetric wakes (e.g., Johansson and George 2006), and three-dimensional wakes (e.g., Cruz et al. 2005). The present study employs vector POD that results in optimal basis functions that are spatial vector POD modes \(\varvec{\Upphi}(x,y),\) where x and y are spatial coordinates. These vector POD modes are the eigenmodes of the equation
where R uu is the two-point spatial correlation matrix for the time-dependent velocity vector field (u(x, y, t)), t is time, dx is the spatial location over which R uu is integrated, and λ is the eigenvalue associated with each of the POD modes and represents the energy contained in that mode. These POD modes can decompose a two-dimensional slice of the velocity field using
where a i (t) is the time-varying coefficient corresponding to the ith POD mode at time t, and (. , .) represents the inner product. Using all N modes, the velocity field can be completely reconstructed using
but a subset of the modes provides a reduced order description. The time-varying coefficients are uncorrelated, and the correlation with themselves is equal to the eignevalue associated with that mode
where δ ik is the Kronecker delta, 〈.〉 is the time average, and summation over i is not implied. For a detailed discussion of various POD implementations, see the references (e.g., Sirovich 1987).
2.3 LSE-POD: a complementary technique
LSE and POD have been successfully used together for estimating quantities in turbulent flows. In the complementary approach, spatially sparse, time-resolved measurements are used to estimate the time-resolved velocity field (or other field) from which the time-varying coefficient of previously determined POD modes may be determined. Alternatively, the spatially sparse, time-resolved measurements may be used to directly estimate the time-varying coefficients of the POD modes. For a comprehensive discussion of the various approaches taken, the reader is referred to the review included in a recent paper (Tinney et al. 2006) and only a few relevant examples are discussed here. Researchers first used the complementary technique to estimate the velocity field using a spatially sparse set of time-resolved velocity data (Bonnet et al. 1994). Subsequently, sparse atmospheric data were used to estimate wind turbine inflow (Spitler et al. 2006) using LSE-POD approach. This complementary technique was also employed with surface pressure measurements to estimate the velocity field near a backward-facing ramp with a flap (Taylor and Glauser 2004) and in an open cavity (Ukeiley and Murray 2005). The current study uses time-resolved pressure measurements to estimate the time-varying coefficients of the spatial POD modes from which the velocity field may be reconstructed.
3 Mathematical description of LSE approaches
The estimation of the wake dynamics using POD modes and their time-varying coefficients using two different LSE approaches was considered. The formulation of these estimation approaches is discussed in the following paragraphs. The estimated time-varying POD coefficient \(\hat{a_{i}}\) at time t k in terms of conditional probability is given by
where E{.} is the expected value of the event, t k−m is the time corresponding to the maximum negative delay, and t k+m is the maximum positive delay used in the estimation. Symmetric positive and negative time delays were used in this study, but this is not strictly required. The mean square error ɛ i of the time-varying coefficient of ith POD mode is determined from the estimated and the original time-varying POD coefficients,
where 〈.〉 represents the time average of the quantities. When the mean square error is minimized, it yields a system of linear equations. This set of linear equations can be solved to determine the LSE coefficients, which can be then used to estimate the time-varying POD coefficients.
3.1 Single-time LSE
In the single-time LSE approach, an unconditional event at a single time is used to estimate a conditional event. The single-time approach is discussed in detail to highlight that, in the flow studied, it cannot accurately estimate the flow field due to the phase lag between the unconditional and conditional events. For this study, the single time was selected at the instance when estimation was performed (i.e., t = t k , ⇒m = 0 in Eq. 5). This zero time lag approach was considered as it is the most common approach, but single-time approaches can employ time lags if desired. For the zero time lag approach, the final system of linear equations (after mean square minimization) can be written as
where N is the number of time-resolved pressure signals used. In Eq. 7, \(\overline { p^{t_{k}}_{A}p^{t_{k}}_{B} }\) represents the two-point correlation of pressures at locations y A and y B with zero time lag (i.e., samples to be average acquired at the same time), \(\overline {a^{t_{k}}_{i} p^{t_{k}}_{B}}\) is the correlation between the time-varying coefficients for the ith POD mode and the pressure signals at location y B for zero time lag, and \(A_{A,i}^{0}\) represents the LSE coefficient for the pressure at location y A associated with the ith POD mode for a time lag of t k –t k , which is 0 for the single time approach used here. In this approach, there are N unknowns (LSE coefficients) and N equations. These N equations were solved simultaneously to determine the LSE coefficients \(A_{1,i}^{0}\) to \(A_{N,i}^{0}\). Four transducers recorded pressure (N = 4) in this investigation, thus limiting the computation time required for determining the LSE coefficients. However, this operation was repeated for each estimated POD mode. Once determined, the LSE coefficients were used to estimate the time-varying POD coefficients (\(\hat{a_{i}}^{t_{k}}\))
For each estimated time-varying coefficient at time t k , N products were summed, which for the present case required the summation of four terms.
3.2 Multi-time-delay LSE
Multi-time-delay LSE uses information from multiple times for estimating a conditional event. When information from the past and future is used for estimation, the method is similar to the implementation of a non-causal filter. Unlike the multi-time LSE approach in the frequency domain (Ewing and Citriniti 1997; Tinney et al. 2006), the computation of the correlation matrix and the LSE coefficients as well as the estimation were performed in the time domain for this investigation. Calculating time correlations between POD coefficients and base pressures was the most straightforward approach for this study, since time-resolved PIV measurements were unavailable. Minimizing the mean square error to determine the LSE coefficients yielded a linear system of equations,
Equations 9–11 indicate that, for each pressure used for estimation, a number of equations is generated equal to the number of time delays included. Equation 12 emphasizes that the set of equations represented by Eqs. 9–11 is repeated for all the pressures used in the estimation. In the above equations, \(\overline{ p^{t_{1}}_{A} p^{t_{2}}_{B} }\) represents the two-point correlation between the pressures at locations y A and y B for a time lag of \(t_{2}-t_{1}, \overline { a^{t_{3}}_{i}p^{t_{2}}_{B} }\) is the cross-correlation between the time-varying POD coefficient for ith POD mode and the pressure at location y B for a time lag of t 2 − t 3, and A n A,i represents the multi-time LSE coefficient for the ith POD mode at location y A for a time delay of t k+n − t k . There are N(2m + 1) unknowns (LSE coefficients) and N(2m + 1) equations, and these equations were solved simultaneously to determine the LSE coefficients. Even though only four pressure transducers were used in this study, the number of unknowns and the time required to solve the system of equation grew rapidly with an increase in the number of time delays included. As with the single-time approach, this system of equation needed to be solved for each POD mode to be included in the estimation. The estimated time-varying POD coefficient for the ith mode (\(\hat{a}_{i}\)) at time t k was then evaluated using
As a result of including information from 2m + 1 times, Eq. 13 represents the summation of N × (2m + 1) products, or 4 × (2m + 1) for the present case.
4 Experimental setup
4.1 Facility and instrumentation
All the experiments for this investigation were conducted in the 0.61 m × 0.61 m × 1.21 m subsonic wind tunnel facility at the University of Wyoming Aeronautics Laboratories (UWAL). The subsonic wind tunnel is an open loop design with a variable frequency driven motor capable of producing free-stream velocities of 10–50 m/s. The inlet section of the wind tunnel has a honeycomb insert and three sets of screens to break down large-scale non-uniformities.
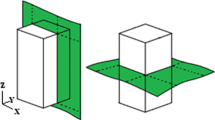
A wedge model produced the wake used in this study. As shown in Fig. 1, an elliptical leading edge section merges with a ramp section such that the flow does not separate. The total length of the model is 0.48 m, and the base height h is 0.10 m. The boundary layer on the model was tripped using a sand strip near the leading edge of the model, as shown in Fig. 1. The free-stream velocity u ∞ for the investigated case was 30 m/s, and the Reynolds number based on model length was 0.98 × 106. The measured boundary layer thickness just prior to separation for the investigated test case was approximately 0.10 h.

A schematic showing the wedge model, field of view for PIV images, and the pressure transducer locations used in the near wake study
Particle image velocimetry (PIV) and high-speed pressure transducers measured the near wake velocity field and the base pressure. For the PIV measurements, a LaVision PIV system with a dual frame CCD camera was used. To perform the PIV measurements, the flow was seeded with atomized oil and twin 50 mJ Nd:YAG lasers illuminated the wake. A cross-correlation, multi-pass, decreasing window size technique was used to determine the wake velocity field. Using four flush-mounted, high-speed pressure transducers, time-accurate pressure signals in the base region were measured. The transducer signals were low-pass filtered at 3,000 Hz, and a high-speed, simultaneous-sampling data acquisition system acquired the filtered signals at a sampling frequency of 6,250 Hz. The pressure transducers were located at four different vertical locations on a single line near the centerline of the model: y/h = −0.40, y/h = 0.00, y/h = 0.27, and y/h = 0.40. For the remainder of the paper, the pressure transducers are referred to by the numbering shown in Fig. 1. These transducers were calibrated in situ before each test using a pressure standard.
4.2 Data acquisition and analysis
For this study, 1,000 uncorrelated (random) PIV images were acquired along with simultaneously sampled pressure signals using the timing shown in Fig. 2. When a PIV image was taken, a trigger was sent to the high-speed data acquisition system that acquired 3,250 pre-trigger and 3,000 post-trigger samples at 6,250 Hz. This sampling interval of one second covered ∼100 vortex shedding cycles for the cases studied. Also, each pressure record and PIV image set was separated from the next set by ∼1,000 vortex shedding cycles ensuring independence of the individual measurements.

Acquisition timing for PIV images and pressure records. The images show velocity vectors determined from instantaneous PIV realizations
The 1,000 PIV realizations were used for a POD analysis employing the classical approach to determine the vector POD modes or the optimal basis functions in the region shown in Fig. 1. Since the studied flow had a single large-scale dominant coherent structure, the two-point statistics used for determining POD modes converged with only 500 velocity realizations. This aspect of the POD convergence was exploited for the error estimation (see Sect. 5.4). The vector POD was used in this study to optimize simultaneously the stream-wise and transverse velocity components, which were tightly coupled due to vortex shedding. Since the studied flow was not homogeneous along the x- or y-axis, spatial POD modes were used in both directions. The kernel for vector POD formulation was 4,988 × 4,988, yielding 4,988 stream-wise and transverse POD modes.
The approach used for estimating the near wake dynamics from the data shown in Fig. 2 was a multiple-step process. After determining the spatial vector POD modes (\(\varvec{\Upphi}_{i}(x,y)\)), the velocity field data were projected onto these modes to calculate the time-varying coefficients a i (t). These known time-varying coefficients were then correlated with the time-resolved pressure signals p(x = 0, y, t) measured on the base of the model as shown in Fig. 1. Using these correlations and the measured pressure signals, the estimated time-varying coefficients (\(\hat{a}_{i}(t)\)) were determined using two types of estimation. For the first type, LSE-POD was used to estimate the time-varying POD coefficients at times when they could be directly compared to those coefficients determined from experimental PIV images. For the second type, estimation of the time-varying POD coefficients was performed for times when no PIV images were available so that the dynamic behavior of the near wake could be reconstructed. The time-varying POD coefficients for the second type will be referred to as the unknown time-varying coefficients.
Before using the multi-time-delay LSE-POD approach for estimation, the convergence of the LSE coefficients was assessed. To perform this assessment, the convergences of the cross-correlation coefficients between the pressure and the time-varying POD coefficients and the cross-correlation between the pressure signals were determined. Observations of the cross-correlation coefficients of the pressure and the time-varying POD coefficients showed less than a 1.5% fluctuation around the mean values when 500 pressure and PIV images realizations were used. The cross-correlation coefficients between the pressure signals revealed similar behavior. These results suggested that the LSE coefficients obtained using only 500 PIV images and their corresponding pressure records could be used to perform estimation of the time-varying POD coefficients. This result was useful for determining the LSE-POD estimation accuracy (see Sect. 5.4).
5 Results and discussion
The estimation approaches discussed in Sect. 3 were applied to the wedge body wake flow. The wake flow field is first presented, and then the POD results are discussed. This is followed by the results of applying the various time-delay LSE-POD approaches to estimate the time-varying POD coefficients. The estimation accuracy and related optimum time lag for estimating the near wake dynamics are then discussed, and an estimation of a single shedding cycle is demonstrated.
5.1 Wake flow
The wake flow behind a two-dimensional wedge body served to demonstrate the capabilities of various LSE-POD approaches. The PIV measurements revealed a fully turbulent wake (see Fig. 2) that was dominated by a single shedding frequency. This shedding frequency was evident from the spectral content of the pressure signals shown in Fig. 3, where a dominant peak at ∼85 Hz suggests strong coherent vortex shedding. For pressure transducers 2 and 3, the pressure spectra showed another peak at ∼170 Hz, which was twice the value of the dominant shedding frequency. This second peak was observed because the pressure transducers near the center of the wedge base sensed alternate vortex shedding from both sides of the model. Figure 4 shows the auto-correlation coefficient of the the pressure signal from transducer 1 and the cross-correlation coefficients between the pressure signals from transducers 1 and 4. As observed in the figure, there is a strong correlation between these pressure signals but a time lag between them exists. This result also reflects alternate vortex shedding from the sides of the model.

Auto-spectral density for the pressure signals from transducers located on the base of the model

Auto-correlation coefficient for pressure signal from transducer 1 and cross-correlation coefficient for the pressure signals from transducers 1 and 4
5.2 POD
The PIV velocity field data were used to determine the POD modes as discussed in Sect. 4.2. Figure 5 shows the stream-wise and transverse components of the first four POD modes. As shown in Fig. 5a–d, the stream-wise components of the first two modes are anti-symmetric about the symmetry plane (i.e., y/h = 0.0), whereas those of modes 3 and 4 are approximately symmetric. In contrast, the transverse component of the first two POD modes, shown in Fig. 5e–f, appears symmetric in nature, whereas that of the next two modes, shown in Fig. 5g, h, exhibits anti-symmetry.

First four POD modes for the wake flow studied: a–d show the stream-wise component of POD modes 1–4, and e–h show the transverse component of POD modes 1–4
To gain further insight about the low-dimensional nature of the wake flow, the energy content and time-varying coefficients associated with the modes were considered. Figure 6 shows the energy content of the first 12 POD modes (λ i ) normalized by the energy in all modes where it is evident that the first two modes capture greater than 60% of the total fluctuating energy. Therefore, a low-order description of the investigated wake flow could be developed using these two modes. Figure 7a shows a scatter plot of the known time-varying POD coefficients for the first two modes (a 1(t) and a 2(t)) normalized by the energy content of the corresponding modes. When the normalized value of the first mode coefficient was approximately one, zero, negative one, and zero, the coefficient of the second mode was approximately zero, one, zero and negative one revealing a phase difference of 90° between the two modes. This phase relationship coupled with the mode shapes allowed structure to convect downstream when the flow was reconstructed (see Durgesh and Naughton (2006) for details).

Fraction of the total energy captured by each of the first 12 POD modes for the investigated wake flow

Comparison of estimated known time-varying POD coefficients using different time delays: a original time-varying POD coefficients, b \(\tau^{*} =0\), c \(-1.25 \leq\tau^{*} {\leq}1.25\), d \(-3.75 \leq\tau^{*} {\leq}3.75\) and e \(-6.00 \leq\tau^{*}\leq 6.00\)
5.3 LSE-POD
The different approaches for implementing the LSE-POD complementary technique discussed in Sect. 3 were applied to the wake flow to estimate known time-varying POD coefficients, which then identified the best approach for studying the near wake flow investigated here. The single-time LSE-POD approach for \(\tau^*=0\) was first considered, where the non-dimensional time-delay \(\tau^{*}\) is given by
where u ∞ is the free-stream velocity for the investigated flow. Figure 7b shows a scatter plot of the estimation of the known time-varying coefficients where it is evident that the estimated coefficients are not distributed like the actual time-varying coefficients shown in Fig. 7a. The single-time LSE-POD approach failed to estimate accurately the time-varying coefficients, even though the pressure signals and velocity field were governed by a single-dominant shedding frequency in the wake, as seen in the spectral content of the pressure signals shown in Fig. 3. The reason for this behavior was linked to the phase difference of ±90° between the pressure signals and time-varying coefficients for the second mode. Due to this phase difference, the cross-correlation coefficients of the pressure signals and the time-varying coefficients for the second POD mode went to zero at the time the estimation was made (i.e., at \(\tau^{*}=0\)) as shown by the dotted line in Fig. 8b and d. However, the cross-correlation coefficient determined from the 1st POD mode and the pressures \( \rho _{{a_{i} p_{j} }}\) was high at \(\tau^{*}=0\), as shown in Fig. 8a and c. Therefore, the velocity field reconstruction using these estimated coefficients yielded large-scale fluctuations, but the correct phase relationship between the modes was lost. This result demonstrates that it is prudent to have prior knowledge of flow field before implementing a single-time LSE-POD approach.

Cross-correlation coefficients between pressure signals and known time-varying coefficients: a a 1(t) and p 1, b a 2(t) and p 1, c a 1(t) and p 4, and d a 2(t) and p 4. Arrows show range of \(\tau^{*}\) used in multi-time-delay estimations
A solution to the problems caused by a single-time estimation was evident from the correlations such as those in Fig. 8. Instead of using the value at \(\tau^{*} =0\), values from an interval of the time series were used,
This multi-time-delay LSE approach, as discussed in Sect. 3, displayed a significant improvement in estimating the known POD coefficients over the single-time LSE approach. A similar result could be obtained using multi-time LSE-POD in the frequency domain (Ewing and Citriniti 1997). Figure 7c–e includes data from \(\tau^{*}_{\min}\leq \tau^{*} {\leq}\tau^{*}_{\max}\), where \(\tau^{*}_{\min}=-1.25, -3.75\), or −6.00 and \(\tau^{*}_{\max} =1.25, 3.75\), or 6.00. As shown in this figure, including a wider time-delay range in the estimation increased the estimation accuracy.
As discussed previously, the pressure correlation matrix size increased with an increase in the delay interval causing a corresponding increase in computation time. To reduce this computation time, a modification of the time-lag approach was considered. In this approach, the values in a band of \(\Updelta \tau^{*}=\pm 0.58\) around eighteen peaks and valleys identified by vertical lines in Fig. 8 were used to estimate the known time-varying POD coefficients, where \(\Updelta \tau^{*} = \Updelta t u_{\infty}/h\), and \(\Updelta t\) is the time interval around the peaks and valleys used for estimation. These points were best suited for estimation because the cross-correlation magnitude was high. Since the time interval \(\Updelta t\) was 1/16th of the time between the adjacent peaks in the cross-correlation plots, using data only in these intervals significantly reduced the number of terms in Eqs. 9–12 and the total number of the equations, thus reducing the computation time.
The known POD coefficients for the first two POD modes estimated using this approach are shown in Fig. 9b, and they exhibit behavior similar to the known POD coefficients in Fig. 9a. The small difference between the known time-varying coefficients and their estimation was attributed to phase changes of the turbulent pressure signals. Whenever there was a shift in the phase of a particular pressure signal, it also shifted the peaks and valleys of the correlation, and thus, this estimation approach may have missed the highest correlation values. As a result, the deviation of the estimated time-varying POD coefficients from their known values increased. For this reason, the estimated time-varying coefficients using delays corresponding to the peaks and valleys of the correlation (i.e., using specific \(\tau^{*}\) values rather than bands about the peaks and valleys) were less accurate, as shown in Fig. 9c. Fig. 9b and c thus indicates that, if prior knowledge of pressure signals was available, then the modified approach using a band of \(\tau^{*}\) around the correlation maxima and minima could significantly reduce the computation time while maintaining the quality of the estimation.

Comparison of the estimated known time-varying POD coefficients using the modified multi-time-delay LSE approach: a the known time-varying coefficients a 1(t) and a 2(t), b the estimated known time-varying coefficients \(\hat{a}_{1}(t)\) and \(\hat{a}_{2}(t)\) using correlation values in a band (\(\Updelta \tau^{*}= \pm 0.58\)) near the peaks and valleys of the correlation coefficients shown by solid lines in Fig. 8, and c scatter plot of the estimated known time-varying \(\hat{a}_{1}(t)\) and \(\hat{a}_{2}(t)\) using a single value at each correlation peak shown in Fig. 8
5.4 Estimation accuracy and optimum time delay
As with any estimation approach, it was important to consider the accuracy of the multi-time-delay estimation for the flow studied. For the spectral LSE-POD, other investigators performed a similar analysis (Ewing and Woodward 2001). To demonstrate the importance of assessing estimation accuracy, two different time delays were used to estimate the unknown time-varying coefficients. Figure 10a and b shows the pressure signals used for estimation and the estimation result for a time-delay range of \(\tau^{*}_{\min} =-2.42\) and \(\tau^{*}_{\max} =2.42.\) Fig. 10c shows the result for a time-delay range of \(\tau^{*}_{\min} =-4.48\) and \(\tau^{*}_{\max} =4.48.\) The estimation results in Fig. 10b yield a path consistent with known time-varying coefficients (Fig. 7a). In contrast, Fig. 10c takes a path that lies outside the scatter observed in Fig. 7a, even though the results from Fig. 7 suggest that an increase in time-delay range would yield a better estimation. The estimation results in Fig. 10 suggest that there is an optimum time-delay range for estimating the unknown time-varying coefficients. A similar result was also observed in the multi-time, frequency-domain approach where a threshold frequency based on coherence function of the signals was used (Tinney et al. 2006).

Estimation of the time-varying POD coefficients for modes 1 and 2 using the multi-time-delay LSE approach: a surface pressure signals used for the estimation, b the estimated unknown time-varying POD coefficients using time delays between τ* = ±2.42, and c the estimated unknown time-varying POD coefficients using time delays between \(\tau^{*}={\pm}4.83\)
Direct quantification of the error in the estimation of the time-varying coefficients during a vortex shedding cycle was not possible due to a lack of time-resolved experimental data at the time of estimation. To overcome this limitation, the 1,000 PIV realizations and their corresponding pressure signal records were divided into two sets of 500 (i.e., sets 1 and 2), which was justified based on the convergence discussed earlier. The POD modes were determined using the PIV data in set 1 and then used with the pressure records from set 1 to determine the LSE coefficients. Using the LSE coefficients from set 1 and the pressure signal records from set 2, the estimated time-varying coefficients of the modes \(\hat {a}_i^{t_k}\) were determined for each PIV realization in set 2. By projecting the PIV realizations from set 2 onto the POD modes determined from set 1, the actual values of the time-varying coefficients \(a_i^{t_k}\) were determined. A comparison of these actual values with the estimated values allows for the determination of the error in the POD mode coefficient estimation.
Having the actual and estimated coefficients for the first two POD modes, the combined errors (ε) of the estimated time-varying coefficients \(\hat{a_{1}}\), and \(\hat{a_{2}}\) suitably normalized by their respective energies were calculated using,
where M is the total number of estimations performed. As indicated by the circular symbols in Fig. 11, an initial increase in the time-delay range caused a decrease in ε, indicating an increase in the accuracy of the estimation. With a further increase in the time-delay range, ε increased significantly. This result showed that the estimation of the unknown time-varying coefficients (or those for set 2) was best for certain time-delay ranges. For the studied flow, the optimum estimation time delays were between \(\tau^{*}_{\max} = 0.75\) and 1.25. In contrast, the time-varying coefficients for set 1 estimated using LSE coefficients determined from set 1 yielded estimations that became more accurate with increasing time delay, as shown in lower curve in Fig. 11. This likely resulted from estimating the time-varying coefficients for the same images that were used in the determination of the LSE coefficients. Thus, the latter results would be misleading in that they indicated using a time-delay range that was longer than the optimum indicated by the upper curve and thus would produce higher error when performing the true estimation.

The combined error values for the studied flow: \(open\,square\) ε values for the estimated time-varying coefficients in set 1 when the data from set 1 are used to determine the LSE coefficients, and open circle \(\varepsilon\) values for the estimated time-varying coefficients in set 2 when the data from set 1 are used to determine LSE coefficients
5.5 Flow dynamics reconstruction
A low-order description of the flow dynamics of the near wake could now be estimated, as both the modes used for the low-order description and the optimum time-delay range for estimation were known. The wake dynamics at eight different points in a single shedding cycle were reconstructed using the four base pressure signals shown in Fig. 12a–d. For the estimation, the optimal time-delay range with \(\tau^{*}_{\max}=1.23\) (as discussed in Sect. 5.4) was used, and the resulting estimated time-varying POD coefficients are shown in Fig. 12e. Using these coefficients, the velocity field was reconstructed to allow for determination of the vorticity field. Figure 12f–m shows the vorticity field overlaid with the velocity vectors for eight different points in the shedding cycle. As observed from this figure, the small-scale structures evident in Fig. 2 were filtered out and the large-scale fluctuations were captured revealing alternate vortex shedding in the wake as expected. Such results show that multi-time-delay LSE-POD can provide a description of the most important flow dynamics even at Reynolds numbers where structures of many sizes are present.

Reconstruction of the wedge near wake flow dynamics using LSE-POD complementary technique: a–d the time-dependent pressure from each of the four transducers, e the estimated time-varying POD coefficients for points (f)–(m) shown in a, and f–m the estimated vorticity overlaid with velocity vectors corresponding to the points in the shedding cycle shown in a
6 Discussion
Various LSE approaches were used to estimate the near wake dynamics behind the bluff body investigated in this study. These LSE approaches have their strengths and weaknesses. The single-time LSE approach requires surface pressure information only at the instance when estimation is performed. As discussed in the mathematical descriptions, using only a single delay requires the least computation time for both determining the LSE coefficients and estimating the time-varying POD coefficients. However, this estimation approach fails to estimate accurately the time-varying coefficients when there is a low correlation between the pressure and the time-varying coefficients at \(\tau^{*} =0\), although there may be high correlation between these quantities for other time delays. This occurs in the studied wake due to the 90° phase relationship between the pressure and some of the time-varying coefficients.
In contrast, multi-time-delay approaches use information from before and after the time of the estimation and therefore capture the high correlation values between the pressures and the time-varying coefficients that may occur at delays other than \(\tau^{*} =0.\) Compared to the single time-lag approach, these approaches require greater computation time that increases with the number of time delays included in the estimation. However, it is the computation time for determining the estimation coefficients that is significant, whereas, once the LSE coefficients are known, estimating the time-varying coefficients requires little computation time. This suggests that multi-time approaches would be desirable for real-time estimation applications (using only information from past times, \(\tau^{*} {\leq}=0\)) if the LSE coefficients have been previously determined (see, for example, Ukeiley et al. 2008). In contrast, the multi-time approach in the frequency domain (Ewing and Citriniti 1997; Tinney et al. 2006) may be faster in determining the LSE coefficients, but the estimation of the time-varying coefficients would require the Fourier transform of the pressure signals. As a result, the computational time associated with the estimation of the time-varying coefficients might be greater than that of the multi-time-delay LSE approach.
An important property of the multi-time delay approach is that the accuracy of the estimation of the unknown quantities does not continue to increase with an increase in the time-delay range past a certain point. This limits the time-delay range used in any practical application.
7 Conclusions
In this study, an LSE-POD approach captured the near wake dynamics downstream of a bluff body. PIV measurements of the near wake flow were used to calculate the spatial POD modes, and time-accurate pressure measurements were correlated with the POD coefficients determined by projecting the measured velocity field data on to the POD modes. This information provided the means of determining the LSE coefficients using different approaches. When successfully determined, the LSE coefficients can be used for low-order reconstruction of the near wake dynamics using the measured surface pressure signals. An important requirement for successfully producing accurate wake dynamics is the inclusion of times when the pressure signals have high correlation with the time-varying POD coefficients. This was achieved by using the multi-time-delay LSE approach.
The multi-time-delay LSE-POD approach has been applied to a quasi-periodic flow with significant energy in its coherent structure. However, the multi-time-delay LSE approach should successfully capture the dynamics in any turbulent flow that has significant energy in a few POD modes and a high correlation between the POD coefficients and the measured signals to be used for estimation. For the investigated case, the accuracy in the multi-time-delay LSE-POD complementary technique decreases significantly if information beyond a certain critical time-delay range is included in the estimation, a result that needs to be further explored.
Determining the time delays used in the multi-time-delay LSE depends on the application. Information from past and future events (i.e., t k−m ≤ t ≤ t k+m) is recommended for non real-time applications such as visualization of flow structure. This is the approach used in this paper, where both past and future events (i. e. pressure measurements at t k−m ≤ t ≤ t k+m) have been used for the multi-time-delay LSE approach, because the primary focus of the investigation was to understand dynamics of flow after the measurements were taken. The multi-time-delay approach, however, is equally suited for real-time estimation using information from just past events (i.e., t k−m ≤ t ≤ 0).
References
Adrian RJ (1977) On the role of conditional averages in turbulence theory. In: Zaron J, Patterson G (eds) Proceedings of the fourth biennial symposium on turbulence in liquids. Science Press, Princeton, pp 323–332
Adrian RJ (1979) Conditional eddies in isotropic turbulence. Phys Fluids 22:2065–2070
Adrian RJ, Jones BG, Chung MK, Hassan Y, Nithianandan CK, Tung ATC (1989) Approximation of turbulent conditional averages by stochastic estimation. Phys Fluids A 1(6):992–998
Ausseur JM, Pinier JT, Glauser MN (2007) Estimation techniques in a turbulent flow field. AIAA Paper 2007-3975
Berkooz G, Holmes P, Lumley JL (1993) The proper orthogonal decomposition in the analysis of turbulent flows. Annu Rev of Fluid Mech 25:539–75
Bonnet JP, Cole DR, Delville J, Glauser MN, Ukeiley LS (1994) Stochastic estimation and proper orthogonal decomposition: Complementary techniques for identifying structure. Exp Fluids 17:307–314
Bonnet JP, Lewalle J, Glauser MN (1996) Coherent structures, past, present, and future. In: Advances in turbulence: proceedings of the European turbulence conference, vol 6. pp 83–90
Citriniti JH, George WK (2000) Reconstruction of the global velocity field in the axisymmetric mixing layer utilizing the proper orthogonal decomposition. J Fluid Mech 418:137–166
Cole DR, Glauser MN, Guezennec YG (1992) An application of the stochastic estimation to the jet mixing layer. Phys Fluids A 4(1):192–194
Cruz AS, David L, Pécheux J, Texier A (2005) Characterization by proper-orthogonal-decomposition of the passive controlled wake flow downstream of a half cylinder. Exp Fluids 39:730–742
Delville J, Ukeiley L, Coridier L, Bonnet JP, Glauser M (1999) Examination of large-scale structures in a turbulent plane mixing layer. Part 1. Proper orthogonal decomposition. J Fluid Mech 391:91–122
Durgesh V, Naughton JW (2006) Experimental investigation of the wake structure responsible for reduced base drag. AIAA Paper 2006-3186
Durgesh V, Naughton JW (2007) Multi-time-delay LSE-POD complementary approach applied to wake flow behind a bluff body. ASME Paper FEDSM2007-37175
Ewing D, Citriniti JH (1997) Examination of a LSE/POD complementary technique using single and multi-time information in the axisymmetric shear layer. In: Aubry N (ed) IUTAM symposium on simulation and identification of organized structures in flows. Kluwer, pp 375–384
Ewing D, Woodward S (2001) On accurate experimental measurements of the dynamics of large scale structures in turbulent flows. In: Pollard A, Candel S (eds) IUTAM symposium on combustion and mixing. Kluwer, pp 73–83
Glauser MN, George WK (1987) Orthogonal decomposition of the axisymmetric jet mixing layer including azimuthal dependence. Advances in turbulence: proceeding of the European turbulence conference. Springer, Berlin, pp 357–366
Guezennec YG (1989) Stochastic estimation of coherent structures in turbulent boundary layers. Phys Fluids A 1(6):1054–1060
Holmes P, Lumley JL, Berkooz G (1996) Turbulence, coherent structures, dynamical systems and symmetry, 1st edn. Cambridge University Press, Cambridge
Johansson PBV, George WK (2006) The far downstream evolution of the high-Reynolds-number axisymmetric wake behind a disk. Part 2. Slice proper orthogonal decomposition. J Fluid Mech 555:387–408
Lumley JL (1967) The stucture of inhomgeneous turbulent flows. In: Yalglom AM, Tatarski VI (eds) Atmospheric turbulence and radio wave propogation. Nauka, Moscow, pp 166–178
Murray NE, Ukeiley LS (2007) Modified quadratic stochastic estimation of resonating subsonic cavity flow. J Turbulence 8(53):1–23
Naguib AM, Wark CE, Juckenhofel O (2001) Stochastic estimation and flow sources associated with surface pressure events in a turbulent boundary layer. Phys Fluids 13(9):2611–2626
Pinier JT, Ausseur JM, Glauser MN, Higuchi H (2007) Proportional closed-loop feedback control of flow separation. AIAA J 45(1):181–190
Sirovich L (1987) Turbulence and the dynamics of coherent structures—parts 1, 2, and 3. Q Appl Math 45(3):561–590
Spitler JE, Naughton JW, Lindberg WR (2006) An LSE/POD estimation of the wind turbine inflow environment using sparse data. AIAA Paper 2006-1364
Taylor JA, Glauser MN (2004) Toward practical flow sensing and control via POD and LSE based low dimensional tools. J Fluids Eng 126:337–345
Tinney CE, Coiffet F, Delville J, Hall AM, Jordan P, Glauser MN (2006) On spectral linear stochastic estimation. Exp Fluids 41:763–775
Ukeiley L, Murray N (2005) Velocity and surface pressure measurements in an open cavity. Exp Fluids 38(5):656–671
Ukeiley L, Murray N, Song Q, Cattafesta L (2008) Dynamic surface pressure based estimation for flow control. In: IUTAM symposium on flow control and MEMS. Springer, Berlin, pp 183–189
Acknowledgments
The authors wish to acknowledge constructive discussions about LSE-POD with Daniel Ewing, Lawrence Ukeiley, and Charles Tinney, as well as the suggestions provided by the reviewers.
Author information
Authors and Affiliations
Corresponding author
Electronic supplementary material
Below is the link to the electronic supplementary material.
AVI (2878 KB)
Rights and permissions
About this article
Cite this article
Durgesh, V., Naughton, J.W. Multi-time-delay LSE-POD complementary approach applied to unsteady high-Reynolds-number near wake flow. Exp Fluids 49, 571–583 (2010). https://doi.org/10.1007/s00348-010-0821-4
Received:
Revised:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00348-010-0821-4