
Abstract
We measure the flow above an array of randomly driven, upward-facing synthetic jets used to generate turbulence beneath a free surface. Compared to grid stirred tanks (GSTs), this system offers smaller mean flows at equivalent turbulent Reynolds numbers with fewer moving parts.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The grid stirred tank (GST) is the standard facility for studying turbulence in the absence of advection (DeSilva and Fernando 1994; Brumley and Jirka 1987). All GSTs, however, are susceptible to secondary flows from several sources (Fernando and DeSilva 1993). Due to its highly mechanical nature, a GST exhibits irregularities in the drive motor, multiple drive shafts that are difficult to align (or grid wobble if there is only one shaft), and departure from pure grid geometry where the drive shaft(s) meet the grid. The GST boundary conditions suffer due to a finite gap between grid edges and the wall. Furthermore, many designs have surface-piercing elements that can impede measurements at the free surface. The deterministic nature of the grid motion can permit secondary flows, once established, to persist in a dynamic equilibrium.
Researchers working over the past 30 years with several different facilities typically report that secondary flows are present but negligible. We consider the ratio \({\ifmmode\expandafter\bar\else\expandafter\=\fi{u}} \mathord{\left/ {\vphantom {{\ifmmode\expandafter\bar\else\expandafter\=\fi{u}} {u_{{{\text{rms}}}} }}} \right. \kern-\nulldelimiterspace} {u_{{{\text{rms}}}} } \), where \(u = \ifmmode\expandafter\bar\else\expandafter\=\fi{u} + {u}\ifmmode{'}\else$'$\fi \), \(u_{{{\text{rms}}}} = {\sqrt {\overline{{{u}\ifmmode{'}\else$'$\fi^{2} }} } } \), and (–) indicates the time-average linear operator. Reported and inferred values from a variety of GST experiments (Table 1) show that \({\ifmmode\expandafter\bar\else\expandafter\=\fi{u}} \mathord{\left/ {\vphantom {{\ifmmode\expandafter\bar\else\expandafter\=\fi{u}} {u_{{{\text{rms}}}} }}} \right. \kern-\nulldelimiterspace} {u_{{{\text{rms}}}} } \) is typically about 0.25, with a best case value of 0.10 in a single-coordinate direction. In the worst case, \({\ifmmode\expandafter\bar\else\expandafter\=\fi{u}} \mathord{\left/ {\vphantom {{\ifmmode\expandafter\bar\else\expandafter\=\fi{u}} {u_{{{\text{rms}}}} }}} \right. \kern-\nulldelimiterspace} {u_{{{\text{rms}}}} } \) can exceed 1. Whether it is fair to neglect secondary flows of this magnitude depends on the purpose of each experiment; in our case, the removal of advective transport will greatly increase the accuracy of our intended measurements of the turbulent transport of CO2 across an air–gas interface, as in Chu and Jirka (1992).
2 Apparatus
We propose a new means of generating turbulence beneath an undisturbed free surface, inspired by the extremely successful active wind tunnel grid of Mydlarski and Warhaft (1996). It resembles the synthetic jet-generated turbulence facilities of Hwang and Eaton (2004) and Birouk (2003). We envision an array of vertically oriented synthetic jetsFootnote 1, each switching on and off randomly, generating turbulence from below with minimal disruption of the free surface. The synthetic jets will merge as do the grid wakes in a GST, and initial anisotropy from the jets will be erased by the turbulent stirring as distance from the orifice plane increases (Villermaux and Hopfinger 1994). Random forcing will prevent most sources of secondary flow, and will greatly decrease the opportunity for secondary flows to persist if established. By adjusting the parameters of the random forcing, we can select a range of frequencies at which to drive the tank, essentially choosing the integral length scale and low wave number region of the power spectrum.
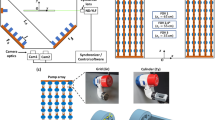
We have retrofitted an existing facility to approximate such a random jet array, and the results are quite encouraging. We have nine synthetic jets arranged in a square lattice at the bottom of a rectangular tank (10.8 cm×10.8 cm×40 cm). As seen in Fig. 1, the incurrent ports are spatially adjacent to excurrent ports (all ports are 0.9 cm in diameter). The excurrent ports obey reflective symmetry with the walls, as suggested by Fernando and DeSilva (1993). One centrifugal pump drives all jets, which are then turned on and off by solenoid valves (Farmington Engineering). By varying the pump speed, we can adjust UJ, the jet exit velocity. The following algorithm is used to randomize each jet independently: Each jet turns on for a time Ti, chosen from a normal distribution with mean µ and variance σ2. When Ti has elapsed, that jet turns off for a time ,To, chosen from the same distribution; we then choose a new value for Ti and so on.

Orifice plane of the random synthetic jet array. The shaded circles are excurrent ports (i.e., flow into the tank), empty circles are incurrent ports, and lines show the tank’s inner walls (tank is 10.8 cm×10.8 cm)
3 Results
The resulting flow is turbulent, with R λ ≈30–50Footnote 2. Velocity measurements were collected at 25 Hz for 3–10 min with a three-component Sontek ADV 10 MHz LAB, at several points in x, y, and z, while independently varying UJ, µ, σ, and Zc, or “cover” (the height of the free surface above the orifice plane). Averaging over all of these runs (and over results for u, v, and w ), the mean value of \({\ifmmode\expandafter\bar\else\expandafter\=\fi{u}} \mathord{\left/ {\vphantom {{\ifmmode\expandafter\bar\else\expandafter\=\fi{u}} {u_{{{\text{rms}}}} }}} \right. \kern-\nulldelimiterspace} {u_{{{\text{rms}}}} } \) is 0.16. The same quantity, computed from the historical GST data in Table 1, is 0.34. Similarly, the median values are 0.09 and 0.25 for our random jet array and the GSTs, respectively. Bootstrap analysis shows that this superior performance of the random jet array is significant at the 95% confidence level (Efron and Tibshirani 1993).
A typical example of the velocity ratio is shown in Table 1 for µ=0.5 s, σ=0.15 s, UJ=50 cm/s, Zc=36 cm, x=(1 cm, 1 cm, 24 cm), where the origin is in the center of the orifice plane. Also shown in Table 1 are results averaged over µ, σ, x, and Zc at a given ReFootnote 3. We observe that \(\ifmmode\expandafter\bar\else\expandafter\=\fi{w} \) is consistently the largest mean; this was also observed by McKenna and McGillis (2000) in their GST. Based on the data in Table 1, the ratio \({\ifmmode\expandafter\bar\else\expandafter\=\fi{w}} \mathord{\left/ {\vphantom {{\ifmmode\expandafter\bar\else\expandafter\=\fi{w}} {w_{{{\text{rms}}}} }}} \right. \kern-\nulldelimiterspace} {w_{{{\text{rms}}}} } \) is still significantly less in our facility than in GSTs (at the 95% confidence level in the mean, and the 90% confidence level in the median).
Also in agreement with previous GST results is the isotropy of the rms turbulent velocities produced by the random jet array. Median values over all our datasets give urms/vrms=0.95, urms/wrms=1.19, and vrms/wrms=1.23. For GSTs, urms/wrms has been consistently reported as 1.1 (Hopfinger and Toly 1976; McKenna and McGillis 2000).
We do not find a statistically significant difference due to varying position, Zc, µ, or σ/µ. However, tests run with and without reflective symmetry at the walls show that fulfilling this boundary condition provides a statistically significant reduction in secondary flows.
The success of the random jet array is quite encouraging, especially given the crude nature of the prototype facility. A full-fledged facility should perform much better than this simple mock-up. A wider range of spatial scales would be accessible in a system with more jets. We expect 64 jets to be an ideal number, balancing excellent spatial resolution with ease of control. Each jet should be run by an individual pump, because, in driving our prototype system with a single pump, we find that UJ varies, depending on how many jets are on at a given moment. Because our system has no moving parts, and because of jets’ Re-independent features, it should be possible to up-scale the apparatus to significantly larger Reynolds numbers.
In conclusion, we have demonstrated that an active synthetic jet array can yield high levels of turbulence with very low mean flow. The mean flows are consistently smaller than both GSTs and passive synthetic jet arrays.
Notes
We define synthetic jets in the broadest sense, such that the net mass flux, integrated over either space or time, is zero for each synthetic jet, i.e., an incurrent and excurrent port coupled via a pump or a single port that oscillates in time between incurrent and excurrent flows.
Because we cannot use Taylor’s frozen field hypothesis in facilities of this nature, Re λ and Re are estimated from spatial data in PIV measurements made in a previous generation of the facility. PIV was taken in a 2 cm×2 cm plane with 0.1-mm resolution. From the velocity field in x and z, we can find the autocorrelation functions, which we then integrate to obtain L≈0.3 cm. We find ε from local gradients and by fitting to power spectra (Cowen and Monismith 1997; Liao and Cowen 2002).
We find that urms is proportional to UJ; thus, Re is proportional to UJ.
References
Birouk M, Sarh B, Gokalp I (2003) An attempt to realize experimental isotropic turbulence at low Reynolds number. Flow Turbul Combust 70:325–348
Bourdel T (2000) Description of prototype jet-array turbulent mixer. Internal report, Department of Physics, Cornell University. Available at http://milou.msc.cornell.edu/publications2.html
Brumley B, Jirka G (1987) Near-surface turbulence in a grid-stirred tank. J Fluid Mech 183:235–263
Chu C, Jirka G (1992) Turbulent gas flux measurements below the air–water interface of a grid-stirred tank. Int J Heat Mass Transfer 35(8):1957–1968
Cowen E, Monismith S (1997) A hybrid digital particle tracking velocimetry technique. Exp Fluids 22:199–211
DeSilva I, Fernando H (1994) Oscillating grids as a source of nearly isotropic turbulence. Phys Fluids 6(7):2455–2464
Efron B, Tibshirani R (1993) An introduction to the bootstrap. Chapman and Hall, New York
Fernando H, DeSilva I (1993) Note on secondary flows in oscillating-grid, mixing-box experiments. Phys Fluids A 5(7):1849–1851
Hopfinger E, Toly J (1976) Spatially decaying turbulence and its relation to mixing across density interfaces. J Fluid Mech 78(1):155–175
Hwang W, Eaton J (2004) Creating homogeneous and isotropic turbulence without a mean flow. Exp Fluids 36(3):444–454
Liao Q, Cowen E (2002) The information content of a scalar plume—a plume tracing perspective. Environ Fluid Mech 2(1–2):9–34
McDougall T (1979) Measurements of turbulence in a zero-mean-shear mixed layer. J Fluid Mech 94(3):409–431
McKenna S (2000) Free-surface turbulence and air–water gas exchange. PhD thesis, Massachusetts Institute of Technology, with advisor McGillis WR. Cited values read from Figs. 6–15
Mydlarski L, Warhaft Z (1996) On the onset of high Reynolds number grid generated wind tunnel turbulence. J Fluid Mech 320:331–368
Thompson S, Turner J (1994) Mixing across an interface due to turbulence generated by an oscillating grid. J Fluid Mech 67(2):349–368
Villermaux E, Hopfinger E (1994) Periodically arranged co-flowing jets. J Fluid Mech 263:63–92
Acknowledgements
The authors gratefully acknowledge the financial support of the National Science Foundation (grant No. CTS-0093794). Any opinions, findings, and conclusions or recommendations expressed in this material are those of the author(s) and do not necessarily reflect the views of the National Science Foundation. The authors wish to thank Thomas Bourdel, who built the excellent tank into which this facility was retrofitted. We also would like to acknowledge the hard work and expertise of Dr. Monroe Weber-Shirk, Lee Virtue, Paul Charles, and Jack Powers in creating this facility.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Variano, E.A., Bodenschatz, E. & Cowen, E.A. A random synthetic jet array driven turbulence tank. Exp Fluids 37, 613–615 (2004). https://doi.org/10.1007/s00348-004-0833-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00348-004-0833-z