
Abstract
A novel, fiber-optic in situ laser hygrometer was developed to measure water vapor with microsecond time resolution directly inside an internal combustion (IC) engine. The instrument is intended for sampling-free quantification of recirculated exhaust gas in combustion engines. Direct tunable diode laser absorption spectroscopy was employed to allow absolute and self-calibrating H2O measurements. The compact and user-friendly instrument combines a fiber-coupled, 1.37 μm distributed feedback diode laser with kHz-fast, continuous wavelength scanning. Only small, typically 10 mm, optical access ports in the engine are needed. The new in situ hygrometer was tested via measurements in a motored optical research engine operated on ambient air, without any artificial humidification. Scanning the laser at 4 kHz resulted in a time resolution of 250 μs (i.e., 3° crank angle at 2,000 rpm), while the DC-coupled detector signals are digitized with a 4MSamples/s 16-bit data acquisition system. Absolute water vapor concentrations around 1 vol.% could be measured and quantified during the full compression stroke, i.e., over a pressure/temperature range of 0.07–0.52 MPa/300–500 K. Without any scan averaging or bandwidth filtering we could demonstrate signal-to-noise ratios between 51 (at p = 0.1 MPa) and 33 (at p = 0.4 MPa), which corresponds to H2O detection limits between 0.02 and 0.035 vol.% or length and bandwidth normalized detectivities of 285 and 477 ppb m Hz−½, respectively. Comparison of the dynamic H2O behavior during the compression stroke across several engine cycles and different operating conditions showed good reproducibility and absolute accuracy of the results, consistent with the boundary conditions, i.e., motored air operation. This new sensor therefore opens up new possibilities for engine cycle-resolved, calibration-free in situ AGR quantification and optimization in engine applications.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The development of modern internal combustion (IC) engines is mainly driven by the necessity to increase fuel efficiency and minimize pollutant emission. A well-proven possibility of reducing engine NO x emissions is exhaust gas recirculation (EGR). Here, parts of the burned combustion gases are scavenged inside the cylinder or returned to the combustion chamber [1]. Special attention must be paid to find an optimal adjustment of the recirculated gas fraction for various operating conditions. This requires quantification of the exhaust gas, especially at high EGR rates where inhomogeneous or fluctuating exhaust gas distributions can lead to misfire. Therefore, an in situ gas analysis directly inside the combustion chamber is needed.
In situ measurements inside the engine impose high demands on the measuring technique. The physico-chemical parameters (pressure, temperature and gas matrix) rapidly change over a large dynamic range. The time before the ignition, i.e., the compression stroke, is of central importance for this paper as it is for EGR analysis. Here, temperatures between 300 and 600 K and pressures from around 0.1 MPa up to 1 MPa are prevailing, while the H2O vapor concentration varies—depending on the EGR ratio—between 1 and 5 vol.%. In order to monitor EGR conditions, the temporal dynamics in the compression stroke should be resolved at typical engine speeds, i.e., 1,000–4,400 rpm. This requires a time resolution of the analytical system in the range of at least a few 100 μs. In most cases this precludes data averaging or at least is counterproductive when studying, e.g., cycle-to-cycle variations.
The situation gets even more complicated in production engines that are not designed to provide large optical access to the combustion chamber. To keep the modifications to production engines low, only small, minimally invasive optical interfaces based on endoscopic optics are applicable, while optics must be robust, i.e., insensitive against window fouling and engine vibrations. Gas temperature measurements inside the combustion chamber of production engines are also difficult to realize.
Given these challenging boundary conditions, the overall advantages of optical methods for target specifications, like small sensor size, fast, sampling- and contact-free measurements, are promising. Previously, several optical measuring methods were—with variable success—applied to engine applications and various engine types. The following section describes some of the published techniques used in the past and particularly the advantages of tunable diode laser absorption spectroscopy (TDLAS) which is also applied in this paper.
EGR-relevant quantities, e.g., species concentration (CO2) and gas temperature have been measured in the 1990s by Cottereau et al. [2] using coherent anti-Stokes Raman spectroscopy (CARS) but had only limited impact due to the need for high power lasers, a complex laser system and a reference cell-based calibration. CARS does not allow to design compact and easy-to-handle in situ spectrometers. A large body of work covers laser-induced fluorescence (LIF) measurements [3–5]. LIF as an imaging method offers clear advantages for example in the analysis of the spatial gas distribution. Disadvantageous, however, is the need for large bore optical access to the combustion chamber for signal detection as well as the need for addition of fluorescent tracers. Further, the LIF-signal depends in a complex way on temperature, pressure and gas composition resulting in complicated quantification and calibration strategies when aiming for absolute concentration data [4]. Most important for EGR applications is that neither H2O nor CO2 can be directly observed with LIF under practically relevant conditions [6].
A great challenge in engine measurements is the high temporal resolution needed for cycle-resolved measurements which consequently requires procedures to handle, evaluate and reduce the large data streams. Broadband spectral diagnostics generate much smaller data rates due to the greatly reduced spectral resolution. Cundy et al. [7], e.g., used a broadband incandescent lamp as light source for a spark plug absorption sensor for combustion studies and recorded for each time step of the concentration measurement only a single, spectrally integrated value for the total absorption. Tomita et al. [8] demonstrated fixed wavelength measurements with a HeNe laser at 3.392 μm for the measurement of CH4 concentrations in IC engines. The very reduced spectral information content, however, makes this approach difficult to quantify and provides only rather coarse results because baseline or line-broadening effects cannot be differentiated and are difficult to correct for. On the other hand, both methods achieved very high measurement rates and relatively low data rates by their integrated immediate “data processing”. Major caveats, however, were the need for sensor calibration and remaining ambiguities in the indispensable procedures correcting for background transmission, misalignment or window fouling.
In contrast, TDLAS, a wavelength scanning technique with very high spectral resolution, maximizes the amount of spectral information that can be extracted from the raw signal, which then promises higher signal stability, better disturbance correction and higher sensitivity. TDLAS is applicable to almost all EGR relevant gas species like H2O, CO2, CO, or hydrocarbons. Highly developed commercial diode lasers and fiber optics allow very compact and transportable spectrometers to be developed. Kranendonk et al. [9, 10] demonstrated a scanning absorption spectrometer with external cavity diode lasers (ECDL) tuned from 1,374 to 1,472 nm for H2O measurements also in research IC engines. Despite the high wavelength scan rates of up to 11.7 kHz the system was limited by the discontinuous, staircase-like tuning caused by mode-hopping of the ECDL which led to discontinuous spectra. H2O measurements were therefore demonstrated “only” at sufficiently high pressures (>1 MPa, T above 800 K) in an engine at low 600 rpm. Lower pressures and temperatures which are particularly important for EGR studies were not covered. Furthermore, they used a 20 GS/s high-speed oscilloscope with only 8-bit resolution for the data acquisition, which generated significant problems due to the need to record very large amounts (Gbyte) of raw data with only a reduced bit resolution of the DAQ, which then limits the performance of the instrument. In addition, only very short maximum experiment times of a few seconds were possible. An efficient study of EGR or even its optimization is therefore not possible with such an approach.
Another promising diode laser-based approach is wavelength-modulation spectroscopy (WMS), which has been previously applied to numerous applications, e.g., to in situ measurements of O2 in a 4-m-diameter waste incinerator [11] or CO in combustion processes [12]. Particularly, the development of digital lock-in techniques for in situ applications [13] have spurred the development of in situ WMS, which has also been applied to engine diagnostics. Rieker et al. [14] for instance use an optical sensor integrated in a spark plug to perform WMS measurements during the compression stroke of a motored IC engine. The sensor could cover a large pressure range but also required—in order to provide significant absorption—minimum gas temperature of 500 K, most importantly, a quite high humidification of the intake air close to water saturation (i.e., 100 % relative humidity). In addition, the signals had to average over 10 motor cycles so that no single-shot measurements could be realized. Another, significant caveat of WMS is the complicated signal generation process. This usually requires the WMS signal to be calibrated, which is a rather complicated multi-step process. Rieker et al. [15] recently demonstrated an improved, calibration-free WMS technique more suitable for harsh environments, which was applied to H2O/CO2 measurements in a scramjet engine at around 600 K, but, at pressures of only 0.026 MPa. Despite these impressive results in situ WMS still suffers from the need for a high-frequency secondary modulation in the WMS scheme, which causes significant additional complexity and disadvantages. Finally, WMS has the reputation to provide better signal-to-noise ratios and thus higher concentration resolution. But, recently it was shown [16] that this is only true for the case when the bit resolution of the DAQ system is limited, which was quite common about a decade or two ago before high-speed high resolution ADC became commercially available, but nowadays is almost obsolete. Finally, it has to be kept in mind that the 2f-WMS signal are proportional to the second derivative of the absorption line shape so that its sensitivity drops significantly with increasing pressure. Mattison et al. [17] developed a spectrometer for H2O and temperature measurements for two optical HCCI engines by multiplexing three fixed wavelength diode lasers. With two resonant and a non resonant laser-wavelength the baseline, respectively, the transmission and the absorption at the center position of the selected absorption lines were extracted, complete absorption profiles could not be recovered. This setup has its own complexities requiring at least two lasers, a demultiplexing unit and a calibration step done at the bottom dead center position.
Direct TDLAS, dTDLAS, in contrast, is extremely robust and most effectively uses the available bandwidth of the ADC and the detection electronics. dTDLAS has been shown to be self-calibrating and also can be made very effective in the suppression of optical in situ disturbances, which was shown in numerous in situ applications, even in complicated, extremely harsh environments like full-scale power plants [18–21].
Due to these favorable properties we decided to develop and test a new scanning dTDLAS-based in situ laser hygrometer for research engine applications, with crank angle-resolved time resolution and a data acquisition system with the capability for “long-term” engine studies over more than 10,000 engine cycles. Further this system should work with ambient air, without additional humidification of the intake air, with gas temperatures from minimum 300 to 600 K, over a pressure range from around 0.1 MPa to at least 0.5 MPa and provide single-scan capabilities to avoid signal averaging over consecutive engine cycles. In this paper, we describe the initial development of this new self-calibrating in situ dTDLAS hygrometer and the its first application for crank-angle resolved, sampling-free H2O vapor measurement during the compression stroke in a optically accessible research engine.
2 Experiment: TDLAS
Water vapor detection is possible in numerous spectral bands in the near and the short-wave mid-infrared (NIR and SW-MIR) (Fig. 1). Particularly, the 1.4 μm absorption band is very often utilized for water vapor detection. This wavelength range is used intensively for optical telecommunication and the optical components are quite advanced.

Absorption spectrum of H2O from 800 to 3,000 nm. The absorption band around 1.4 μm is used in this work. For future work measurements in the 2.6 μm band are promising
The alternative 1.8-μm band offers line strengths which are twice as high, but less developed technical components due to the large spectral separation from commercial applications. Highly interesting is also the 2.6 μm range for which recently room temperature DFB diode lasers and optical components became available. The 20× increase in H2O line strengths in this band promises in the future sensors with very short absorption lengths suitable for localized water vapor measurements with path lengths of only a few millimeters, e.g., in the immediate vicinity to the spark plug.
Due to the best technical component properties, we have chosen to use the 000-101/110-211 absorption line in the 1.4 μm band at 7,299.431 cm−1 (1,369.97 nm) for the current work. This line was used before in numerous other projects [22–24], and we also have verified the line parameters experimentally. Due to the significant pressure broadening in the engine, it is also desirable that the line is well isolated from other water lines. The absorption had to be large enough on the short path length in the combustion chamber, especially since no averaging can be used for noise suppression. The simulation with HITRAN2008 data shows an expected absorption of 4.5–9.5 % at 0.1 MPa, 300 K and for water concentrations from 1 to 5 vol.%. Due to enhanced uncertainties in the pressure-derived engine gas temperatures it is important to study the temperature-dependent line strength S(T) of the target line. Figure 2 shows S(T) in the expected temperature range as well as the relative S(T) error per Kelvin. Despite the sub-optimal temperature sensitivity, we preferred this line due to the experimental validation of the line data and particularly due to the near perfect spectral isolation of the line, which is important for the higher engine pressures.

Temperature behavior of the line strength for the selected absorption line 000-101/110-211 at 7,299.431 cm−1 (1,369.97 nm) and the change of S(T) per Kelvin in the temperature range from 300 to 600 K
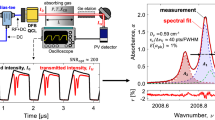
The experimental setup of the hygrometer is shown in Fig. 3. A function generator provides a periodic, triangular signal to modulate the laser current. The laser is a telecom-type distributed feedback diode (DFB) laser module, which offers temperature stabilization with an internal Peltier element, single-mode fiber coupling and an optical isolator to avoid feedback. The light is delivered via single mode optical fiber, which would also allow measurements with several sub beams at different locations in the engine (e.g., in the intake system, combustion chamber, and exhaust system) or to carry out additional measurements at a reference cell to check the stability of spectral parameters such as the laser line position. The laser light emitted from the fiber is collimated with an aspheric lens and directed through the measuring volume (engine combustion chamber). The transmitted light is detected by a 1 mm2 InGaAs semiconductor photodiode (Hamamatsu G8370), converted into a voltage signal by a low-noise transimpedance amplifier (Femto DLPCA-100, 80 MHz bandwidth) subsequently digitized with a 16-bit A/D converter (National Instrument, PXIe 6124, 4MSamples/s,) and evaluated with a LabView program.

Schematics of the laser hygrometer. The function generator modulates the laser diode current to generate a wavelength scan of the emitted light. Parallel measurements in the combustion chamber and a reference cell were performed

Picture of a cylinder quartz ring in the optical engine. On the left and right hydraulic pistons can be seen which press the cylinder head onto the lower part of the engine
The principle of direct TDLAS is based on the analysis of the wavelength-dependent attenuation of quasi-monochromatic light passing through a gas sample. To describe this behavior the Lambert–Beer law can be used [25]:
With n being the number density of the molecular absorbers, I 0(λ) the initial laser intensity and I(λ) the intensity detected after the probe with a absorption length L. The absorption line profile is characterized by the temperature-dependent, spectrally integrated line strength S(T), and the normalized (area = 1) shape function g(ν,ν 0 ), which is centered at the wavelength ν 0 .
For in situ measurements in harsh environments two disturbing effects must be taken care of. First, there may be strong, spectrally broadband light losses, e.g., due to particles in the laser beam, window fouling or laser misalignment over time. Secondly, there may be light emission, e.g., from the combustion process itself, which increases the detector signal. To correct these effects, two additional variables for transmission loss Tr(t) and background emissions E(t) are introduced which lead to an extended version of the Lambert–Beer law [26]:
Spectrally integrating the absorption line shape g(ν,ν 0) over the ν (cm−1) and resolving Eq. 2 with respect to the absorber density n leads to:
Thus, the absorber number density can be determined without the need of a concentration calibration, solely with knowledge of the line strength S(T), the experimental boundary conditions [p, T, Tr(t), E(t)] and the dynamic laser tuning coefficient dν/dt. Further, for H2O measurements it must be taken into account that the optical sections which are accessible to the ambient air, may—despite the purging procedures—contribute to the total H2O absorption signal. This signal contribution must be corrected for. Details about this correction are described later in Sect. 5.
3 Optically accessible engine
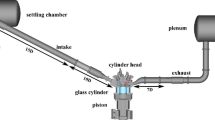
In situ TDLAS engine measurements were carried out in an optically accessible single-cylinder research engine in motored operations. During the compression stroke the difference between motored and fired operations are relatively small for concentration measurements. In fired operations the water vapor concentration is significantly higher because of the remaining exhaust gas in the cylinder resulting in an even higher SNR. However, the calculation of the in-cylinder temperature from pressure data becomes more complex. For this first evaluation of the engine-hygrometer, we therefore studied only motored operation. Signal capture during fired operations would probably be possible, but the less defined temperatures would lead to a much higher H2O uncertainty. For the future, we therefore plan to extend our spectrometer to optical measurements of the gas temperature during fired operations. Details about the engine parameters in the motored data presented here are given in Table 1. The upper part of the cylinder liner including some of the side walls of the combustion chamber can be replaced by either quartz liners or metal sections with integrated windows in order to provide optical access to the combustion chamber. Figure 4 shows a picture of the quartz ring offering nearly 360° of horizontal optical access and 86 mm absorption path length when transilluminated along the optical axis.

Schematic of the laser beam passing through the quartz ring. A direct, centered transillumination leads to significant optical interferences (fringes). Offsetting the laser beam from the center suppressed the fringes and provides a 100 times better SNR
To precisely record the cylinder position, we record a trigger signal in parallel to the TDLAS signal at every top-dead center (TDC) position. TDC was also recorded to synchronize the engine test stand and the spectrometer thereby assigning a crank-angle degree scale (CAD) to every laser scan. The cylinder head also allows varying valve timing to modify EGR.
In order to determine H2O concentration in the cylinder from the laser absorption, gas pressure and temperature must be known (see Eq. 3). The in-cylinder pressure is measured by a piezoelectric transducer. The measured voltage signal must be corrected to deduce absolute pressure values. The engine’s commercial high-speed data acquisition system includes during post-processing a zero point pressure correction [27]. TDLAS data were acquired with a completely separate DAQ-system. For consistency we implemented the same zero-pressure correction in the data processing of the absorption measurements. For the motored measurements presented here we calculated the gas temperature using the measured cylinder pressure assuming an adiabatic compression process. The gas temperature before start of compression was deduced from a thermocouple measurement (NiCrNi) in the intake. If the engine were to be fired, calculation of the bulk-gas temperature from the cylinder pressure would still be possible, but with higher uncertainty due to greater heat transfer to the now hotter cylinder wall. Therefore, in that case either more sophisticated engine models or experimental techniques like absorption spectroscopy or LIF [28, 29] to experimentally determine the in-cylinder temperature would have to be applied.
4 Optical access
For the work presented later we developed a new, compact and minimally invasive fiber-optical access port (FOAP), which easily can be attached to a quartz cylinder ring, so that a fibered laser collimator and a photodiode are positioned at opposite sides of the cylinder. The challenges were to construct the FOAP in such a way so as to completely avoid expensive modifications of the quartz rings or the engine mechanics near the quartz ring, and to simultaneously ensure a stable alignment of the laser beam and the photodiode despite the confined space and the harsh environment. Furthermore, the ambient humidity in the cylinder-external absorption path (i.e., in the spaces between laser and quartz ring and between photodiode and quartz ring) had to be suppressed by purging with dry N2 to avoid systematic offsets in the H2O absorption signal. An additional important factor was the suppression of optical interferences (fringes), especially between planar, transmissive surfaces, i.e., the quartz liner walls. A centered transillumination of the glass ring caused significant interference and signal disturbance by the four perpendicular, uncoated glass surfaces, which resulted in a poor signal-to-noise ratio (SNR) of only 3. An optimized optical access completely suppressed these problems, by slightly offsetting the laser beam from the center of the quartz ring by about 5 mm (as shown in Fig. 5) so that all surfaces were hit at a sufficient inclination.
This intentional “misalignment” significantly suppressed the fringes and allowed a 100 times improved SNR. Figure 6 shows a typical semi-processed signal with improved fringe suppression (circles) and a line shape model based on a Voigt profile [30] (solid line) fitted to the measured data. The measurements were performed in the detached quartz ring with identical optics but under lab conditions (T = 275 K, p = 0.1 MPa). We used our typical lab laser modulation frequency of 139.8 Hz, which is well suited, for the analysis of optical interferences (which would not depend on modulation frequency). The standard deviation (1σ) of the residual (between measurement and fit) shown in the lower graph of Fig. 6 indicates an optical noise of 2.5 × 10−4 OD, which, despite the short absorption path of 86 mm, allows an excellent SNR of 483 due to the good suppression of optical interferences.

Measurement with the novel fiber-optical access port (FOAP) attached to the engine quartz ring at lab conditions (T = 275 K, p = 0.1 MPa), a modulation frequency of 139.8 Hz and “offset” alignment
To avoid the expensive and quite delicate cylinder quartz rings, we also developed a new, more robust and less costly fiber-optical interface, FAOP-2, based on a metal ring that could replace the quartz ring of the single-cylinder engine. This new metal inset has small windowed orifices for optical access of the laser beam. FOAP-2 also offers a simple possibility of changing the windows for testing purposes or cleaning. Different window materials and window geometries were tested. FOAP-2 further simplifies handling and minimized test preparation time compared to the quartz ring FOAP. To cope with the limited space at the engine test bed, we were able to pre-align the optical components at FOAP-2 and simply slide in the metal ring into the engine, with all optics attached. The new FOAP-2 interface thus is more of a plug-and-play device which reduces engine downtime by doing all necessary adjustments outside the engine test bed. Further, FOAP-2 allows to test new optical access strategies with small bores suitable for application in production engines.
Figure 7 shows a absorption signal measured under lab conditions with the FOAP-2 interface and wedged (1°) BK7 windows (f mod = 139.8 Hz) yielding a slightly worse optical resolution of 5.7 × 10−4. This slight loss is not critical and well compensated by the improved handling and the greater adjustability at the engine test bed, so that many measurements were carried out with the FOAP-2. In future measurements we will use slightly inclined, wedged sapphire windows which will avoid all perpendicular surfaces and which should then enable an optical resolution closer to FOAP-1.

Test measurement of ambient air in the FOAP-2 metal optical interface at lab conditions (T = 275 K, p = 0.1 MPa, f mod = 139.8 Hz)
5 Engine measurements
The below measurements were performed in the single-cylinder engine described before under motored operations at a speed of 2,000 rpm. The crank-angle convention used in all graphs and in the text is −360 < CAD < 360 where 0 CAD is top dead center in the compression stroke (TDC, i.e., the piston at the uppermost position in the cylinder). Ambient air with typical humidity level of 30–70 % relative humidity at room temperature was used as gaseous process medium during the motored operation, providing relatively constant ambient humidity levels during the short engine experiments. Measurements with EGR would provide higher H2O concentrations due to the additional H2O present in the burnt gases. Therefore, the SNR reported here represents the worst-case scenario because the measurements were performed at the lowest expected H2O concentrations.
Figure 8 shows raw in situ laser signals and the pressure trace for a full engine cycle. Here, the laser was scanned with a modulation frequency of 4 kHz to facilitate detailed engine analysis with high crank-angle resolution. With f mod = 4 kHz we achieve a time resolution of 250 μs or a corresponding crank angle resolution of 3 CAD at an engine speed of 2,000 rpm. It has to be noted that near TDC, i.e., near maximum pressure, the piston blocks the laser beam preventing signal detection.

Pressure (red) and photodiode TDLAS signal (black) over one full engine cycle from −360 to +360 CAD. Near TDC the piston blocks the laser beam resulting in zero signal
Figure 9 shows a “zoomed-in” TDLAS raw signal for a single laser modulation period (=scan) around −77 CAD. For a sufficient resolution of the absorption line we typically record 500 ADC samples (also called pixel) for every up ramp. The up ramp shown here is dominated by the laser amplitude modulation (AM) caused by the triangular modulation of the laser current.

Raw detector signal at a scan rate of 4 kHz at the optically accessible engine. Information about concentration, transmissivity and background emissions can be extracted
In contrast to the WMS technique direct TDLAS allows to extract from the raw data not only the molecular absorption signal, but also all necessary information about the optical disturbances to be corrected for: (A) from the (corrected) area of the H2O absorption line we can determine the H2O number density or volume concentration. The width of the absorption line reflects mainly pressure (with some temperature influence) and thus can be used for a coarse check of the pressure transducer. (B) at −78.5 to −78.6 CAD where the laser is effectively turned off, we can deduce information on luminous background emissions, e.g., from the combustion process. (C) Finally, it is also possible to derive information from the maximum transmission of the absorption path, i.e., the photodiode signal around −76.7 CAD. Two effects can reduce this signal, changes in the optical alignment or formation of broadband absorbers like, e.g., particles or droplets. Therefore, a stable alignment with negligible window fouling, would allow to deduce high-speed information on particle/droplet injection/formation/destruction. As an example we look at Fig. 8 again and deduce that there were no transmission losses (i.e., stable spectrometer alignment and no noticeable particle or droplet formation) during compression between −300 and −45 CAD. In contrast, during the expansion stroke between 45 and 300 CAD we capture a rapid, completely reversible 20 % loss in transmission, which may be attributed to the formation of water droplets caused by adiabatic expansion cooling. This presumption is supported by the fact that no such loss could be observed once we operate the engine with dry nitrogen instead of humid air.
To evaluate the H2O absorption line area, we fit a polynomial baseline (containing all disturbance information) as well as a Voigt line shape model for the H2O line using a non-linear Levenberg–Marquart algorithm [31]. Due to the significant line widths at pressures above 0.1 MPa we used a multi-line Voigt fit to account for spectral overlap by the several absorption lines from 7,294 to 7,306 cm−1. Up to 18 strong lines located outside the absorption scan were calculated using HITRAN 2008 data [32]. The width of all lines was calculated from the measured gas pressure and the derived temperature. In the first experiments with the FOAP it became obvious at higher pressures (0.3–0.5 MPa), that the ambient humidity in the outside paths was not sufficiently suppressed by the N2 purge and that a narrower line was superimposed to the high-pressure in-cylinder water absorption. To correct for the resulting “parasitic” absorption contribution and to remove this systematic contribution from the total absorption signal, we fitted two Voigt line sets, one with the engine pressure/temperature and one with atmospheric pressure/room temperature to the raw signals. Line widths and line positions of the two composite lines were calculated using HITRAN data for S(T) and our own measured air broadening coefficient and broadening temperature dependence by Hunsmann et al. [33]. Contribution by parasitic water absorption to the total water line area were, with the current purging scheme, typically in the order of 0.0085 cm−1, which corresponds to about 20 % of the total area of the path integrated line profile. In further measurements, the effectiveness of the parasitic water suppression was tested before and after the engine measurements by purging the engine with dry nitrogen to avoid these complications of the fitting process. At higher pressures we also took into account the pressure-induced line shift between the parasitic and the in-cylinder water vapor by calculating the differences in the line position using the measured pressure and the pressure shift coefficient from HITRAN2008.
Figure 10 shows four typical single-scan water vapor line profiles for measurements during the compression stroke at various pressures between 0.1 and 0.4 MPa. No averaging or digital filtering was applied to preserve the high time resolution of 250 μs and to avoid unwanted modifications of the H2O line width. The laser modulation depth at a scanning rate of 4 kHz was about 1.2 cm−1. The strong increase in Lorentzian width with increasing pressure can be seen clearly. With rising pressures it became more and more important to compute the line width instead of trying to fit the width as a free parameter. With this concept we achieved at 0.1 MPa and 250 μs time resolution an optical resolution of 2 × 10−3 and a SNR of 51, corresponding to a detection limit of 0.02 vol.% H2O or 285 ppb m Hz−½. At higher pressures, i.e., 0.4 MPa, the signal-to-noise dropped to about 30, respectively, a detection limit of 0.035 vol.% or 477 ppb m Hz−½.

Four in situ TDLAS absorption profiles during motored engine conditions at −114, −69, −57 and −48 CAD resp. 0.1, 0.21, 0.29 and 0.4 MPa with measured data (circles) and adapted Voigt profiles (solid lines)
Figure 11 shows the dynamic evolution of the in situ H2O concentration during the compression stroke (i.e., from −144 to −45 CAD) for four different engine cycles. The engine runs in motored operation with throttle position of 5 % and without EGR, hence, only fresh air gets into the combustion chamber and is subject to compression, so that it is expected that the H2O concentration stays constant over the whole compression stroke. The analysis of the TDLAS signals shows an average H2O concentration of 1.09 vol.% with a SD (1σ) of 0.06 vol.% (=5.5 % rel.) for the complete compression stroke. Especially at the early phase of the compression, up to a pressure of 0.25 MPa (i.e., from −144 to −63 CAD), the H2O concentration shows the lowest fluctuations with an identical average concentration of 1.09 vol.% and a much lower SD of only 0.02 vol.% (1σ) or 1.8 % relative variation.

Measured H2O concentration from −144 to −45 CAD with a crank-angle resolution of 3 CAD. The error bar at −114 CAD indicates the average fluctuation of only 0.02 vol.% (1σ) within the −144 to −63 CAD window
The measured concentration from −144 to −63 CAD is shown in more detail in Fig. 12. At −114 CAD an error bar indicates the SD of 0.02 vol.%. During the higher pressures (−60 to −45 CAD) the apparent H2O fluctuations become larger ±0.14 vol.% while the average concentration is constant (1.07 vol.%) within the fluctuation range.

Measured H2O concentration from −144 to −63 CAD with a crank-angle resolution of 3 CAD. The error bar at −48 CAD indicates the average fluctuation within the −60 to −45 CAD window
There are several possible reasons for the increased H2O fluctuations at higher pressures: (A) increased uncertainty in the conversion of the relative pressure signals to absolute pressure. Due to the rapid pressure change at the end of the compression, a small shift in the synchronization of the pressure signal and the detector signal results in a large change in pressure for each scan. The sensor is designed for high-pressure measurements, hence, the sensor uncertainty is higher for lower pressures. (B) At the end of our compression window, i.e., at high pressures, the pressure change per unit time is much faster, so that the pressure significantly varies during the time of one absorption scan, which then leads to an uncertainty in the assignment of the measured pressure to a scan. For the shown measurements the maximum change in pressure from the beginning of a scan (laser out) to the end of a scan (maximum laser current) was 0.02 MPa. To compensate this effect the pressure was averaged for the time of the scan. In total, we estimated the pressure uncertainty to be 7 %. (C) As we use adiabatic compression equations to compute the gas temperature from the computed pressure, temperature picks up uncertainties on two “paths” into the total H2O uncertainty. (D) Additionally, we must deal with the uncertainty of the HITRAN line parameters (line strength, broadening parameter, pressure shift, etc.) which have stated uncertainties in HITRAN2008 of 2–10 %. (E) The correction for parasitic ambient water also contributes to the total uncertainty of the H2O measurement. (F) In addition, the uncertainties in the absorption length (±1 mm) and the fitting process (3 %) must be taken into account.
The overall measurement uncertainty is therefore estimated to be about 14 %. In this uncertainty calculation the largest influence comes from the uncertainty in line strength (49 %), pressure (23 %) and temperature (23 %). The H2O concentration (average 1.07 ± 0.14 vol.%) measured over the full compression stroke can therefore be interpreted to be constant within the measurement uncertainty which is consistent with our assumption when compressing outside air. The humidity outside the engine could only be measured in the engine cabin and not directly in the intake. The measured humidity (1.6 vol.%.) is therefore only a coarse indication of the humidity inside the combustion chamber. From the fact that the H2O-concentration profiles of all four independent motor cycles are within our uncertainties essentially identical, we deduce that the in situ laser hygrometer is reproducible and stable over time.
Finally, we also investigated a possible dependence of the measured humidity on the throttle position of the engine. Figure 13 shows the comparison of two measurements at 5 and 10 % throttle.

Measured H2O concentration variation from −144 to −45 CAD for two different engine parameters (5 and 10 % throttle)
The maximum pressure for 10 % throttle increases to 0.52 MPa, while the average H2O concentration (1.10 ± 0.08 vol.%) remains constant within the fluctuations over the compression cycle. The same holds for the 5 % throttle position (1.09 ± 0.06 vol.%). Again, this was expected in a motored scenario and thus serves as a first validation step of the absolute accuracy of the TDLAS sensor. From this data and this comparison between different engine settings, we deduce a good agreement between these measurements and with our assumptions about the process. Further, we could demonstrate a good reproducibility, stability and—even without a calibration—a good absolute accuracy of our new engine in situ TDLAS hygrometer.
6 Conclusion and outlook
A new, absolute, high-speed laser hygrometer for sampling-free, in situ gas analysis inside the cylinder of a research glass engine was developed and successfully demonstrated. This hygrometer is based on 1.4 μm telecom DFB diode lasers, is fully fiber-coupled, completely compatible with transparent quartz cylinders and opto-mechanically easy to use in standard optically accessible engines via a simple clip-on opto-mechanical access port. Demonstration measurements with a time resolution of 250 μs, i.e., 3° crank angle resolution, were performed during the compression stroke of a motored engine at 2,000 rpm and covered a temperature/pressure range from 300–500 K/0.07–0.52 MPa. Without any scan averaging we achieved H2O detection limits of up to 0.02 vol.% or 285 ppb m Hz−½. The new DAQ system and spectrometer software proved capable of continuous streaming of unaveraged TDLAS raw data to a standard hard drive at 4 kHz scan rate (250 μs time resolution). With a standard 1 terabyte hard drive it is therefore possible record TDLAS streaming data for several hours, therefore permitting even long-term engine studies searching for erratic misfire events. The high time resolution was used to study the dynamic evolution of the H2O concentration during the compression strokes. Under motored operation we found, as expected, constant H2O concentrations over multiple compression cycles, but also for different engine settings.
To our knowledge, this is the first time direct TDLAS system for calibration-free, absolute, high-speed H2O measurements inside an IC engine has been successfully realized. Owing to the “single-shot” capabilities, our new spectrometer is well suited to study cycle-to-cycle variations in EGR applications.
In the near future, we will further improve the time resolution of the system even further aiming at laser scan rates beyond 10 kHz using an improved data acquisition system, with a high-speed A/D converter at 100 MSamples/s. This will permit time resolutions of 100 μs and better or 1.2° CAD resolution at 2,000 rpm. Further, we will modify our system to enable measurements at fired engine conditions. Finally, we will increase the achievable pressure range by at least a factor of 3 by employing a vertical cavity surface emitting laser (VCSEL) with 3–10 times higher tuning ranges.
References
N. Ladommatos, S. Abdelhalim, H. Zhao, The effects of exhaust gas recirculation on diesel combustion and emissions. Int. J. Engine Res. 1(1), 107–126 (2000)
M.J. Cottereau, F. Grisch, J.J. Marie, CARS measurements of temperature and species concentrations in an IC engine. Appl. Phys. B 51(1), 63–66 (1990)
C. Schulz, A. Dreizler, V. Ebert, J. Wolfrum, Combustion diagnostics, in Springer Handbook of Experimental Fluid Mechanics, ed. by C. Tropea, A.L. Yarin, J.F. Foss (Springer, Berlin, 2007), pp. 1241–1315
C. Schulz, V. Sick, Tracer-LIF diagnostics: quantitative measurement of fuel concentration, temperature and fuel/air ratio in practical combustion systems. Prog. Energy Combust. Sci. 31(1), 75–121 (2005)
D.A. Rothamer, J.A. Snyder, R.K. Hanson, R.R. Steeper, Optimization of a tracer-based PLIF diagnostic for simultaneous imaging of EGR and temperature in IC engines. Appl. Phys. B 99(1–2), 371–384 (2009)
H. Li, R.K. Hanson, J.B. Jeffries, Diode laser-induced infrared fluorescence of water vapour. Meas. Sci. Technol. 15, 1285–1290 (2004)
M. Cundy, T. Schucht, O. Thiele, V. Sick, High-speed laser-induced fluorescence and spark plug absorption sensor diagnostics for mixing and combustion studies in engines. Appl. Opt. 48(4), B94–B104 (2009)
E. Tomita, N. Kawahara, M. Shigenaga, A. Nishiyama, R.W. Dibble, In situ measurement of hydrocarbon fuel concentration near a spark plug in an engine cylinder using the 3.392 μm infrared laser absorption method: discussion of applicability with a homogeneous methane–air mixture. Meas. Sci. Technol. 14(8), 1350–1356 (2003)
L.A. Kranendonk, A.W. Caswell, A.M. Myers, S.T. Sanders, Wavelength-Agile Laser Sensors for Measuring Gas Properties in Engines (SAE International, Warrendale, PA) 2003-01-1116, Mar. 2003
L.A. Kranendonk, J.W. Walewski, T. Kim, S.T. Sanders, Wavelength-agile sensor applied for HCCI engine measurements. Proc. Combust. Inst. 30(1), 1619–1627 (2005)
V. Ebert, J. Fitzer, I. Gerstenberg, M. Jochem, J. Martin, K.-U. Pleban, J. Wolfrum, Fast In situ Monitoring of O2 in a Full-scale Waste Incinerator with NIR-Diode-Lasers. Presented at the 18. Deutsch-Niederländischer Flammentag, vol. 1313, pp. 549–554 (1997)
X. Chao, J.B. Jeffries, R.K. Hanson, Absorption sensor for CO in combustion gases using 2.3 μm tunable diode lasers. Meas. Sci. Technol. 20(11), 115201 (2009)
T. Fernholz, H. Teichert, V. Ebert, Digital, phase-sensitive detection for in situ diode-laser spectroscopy under rapidly changing transmission conditions. Appl. Phys. B Lasers Opt. 75(2), 229–236 (2002)
G.B. Rieker, H. Li, X. Liu, J.T.C. Liu, J.B. Jeffries, R.K. Hanson, M.G. Allen, S.D. Wehe, P.A. Mulhall, H.S. Kindle, A. Kakuho, K.R. Sholes, T. Matsuura, S. Takatani, Rapid measurements of temperature and H2O concentration in IC engines with a spark plug-mounted diode laser sensor. Proc. Combust. Inst. 31(2), 3041–3049 (2007)
G.B. Rieker, J.B. Jeffries, R.K. Hanson, Calibration-free wavelength-modulation spectroscopy for measurements of gas temperature and concentration in harsh environments. Appl. Opt. 48(29), 5546–5560 (2009)
B. Lins, R. Engelbrecht, B. Schmauss, Software-switching between direct absorption and wavelength modulation spectroscopy for the investigation of ADC resolution requirements. Appl. Phys. 106(4), 999–1008 (2012)
D.W. Mattison, J.B. Jeffries, R.K. Hanson, R.R. Steeper, S. De Zilwa, J.E. Dec, M. Sjoberg, W. Hwang, In-cylinder gas temperature and water concentration measurements in HCCI engines using a multiplexed-wavelength diode-laser system: sensor development and initial demonstration. Proc. Combust. Inst. 31(1), 791–798 (2007)
J. Wolfrum, T. Dreier, V. Ebert, and C. Schulz, Laser-based combustion diagnostics in Encyclopedia of Analytical Chemistry, ed. by R.A. Meyers (Wiley, Chichester, 2006)
H. Teichert, T. Fernholz, V. Ebert, Simultaneous in situ measurement of CO, H2O, and gas temperatures in a full-sized coal-fired power plant by near-infrared diode lasers. Appl. Opt. 42(12), 2043–2051 (2003)
S. Wagner, B.T. Fisher, J.W. Fleming, V. Ebert, TDLAS-based in situ measurement of absolute acetylene concentrations in laminar 2D diffusion flames. Proc. Combust. Inst. 32(1), 839–846 (2009)
P. Ortwein, W. Woiwode, S. Fleck, M. Eberhard, T. Kolb, S. Wagner, M. Gisi, V. Ebert, Absolute diode laser-based in situ detection of HCl in gasification processes. Exp. Fluids 49(4), 961–968 (2010)
S. Hunsmann, K. Wunderle, S. Wagner, U. Rascher, U. Schurr, V. Ebert, Absolute, high resolution water transpiration rate measurements on single plant leaves via tunable diode laser absorption spectroscopy (TDLAS) at 1.37 μm. Appl. Phys. B Lasers Opt. 92(3), 393–401 (2008)
A.R. Awtry, B.T. Fisher, R.A. Moffatt, V. Ebert, J.W. Fleming, Simultaneous diode laser based in situ quantification of oxygen, carbon monoxide, water vapor, and liquid water in a dense water mist environment. Proc. Combust. Inst. 31(1), 799–806 (2007)
A. Mangold, R. Wagner, H. Saathoff, U. Schurath, C. Giesemann, V. Ebert, M. Krämer, O. Möhler, Experimental investigation of ice nucleation by different types of aerosols in the aerosol chamber AIDA: implications to microphysics of cirrus clouds. Meteorol. Z. 14(4), 485–497 (2005)
J.H. Lambert, Lamberts Photometrie: Photometria, Sive de Mensura Et Gradibus Luminis, Colorum Et Umbrae (1760), vol. 2. (Nabu Press, Charleston, 2010)
V. Ebert, J. Wolfrum, Absorption spectroscopy, in Techniques and Applications (Springer, München, 2001), pp. 227–265
G. Hohenberg, Der Verbrennungsverlauf—ein Weg zur Beurteilung des motorischen Prozesses. Presented at the 4. Wiener Motorensymposium, Düsseldorf, vol. 6, pp. 71–88 (1982)
S.T. Sanders, T. Kim, and J.B. Ghandhi, Gas Temperature Measurements During Ignition in an HCCI Engine (SAE International, Warrendale, PA) 2003-01-0744, Mar. 2003
S. Einecke, C. Schulz, V. Sick, Measurement of temperature, fuel concentration and equivalence ratio fields using tracer LIF in IC engine combustion. Appl. Phys. B Lasers Opt. 71, 717–723 (2000)
E.E. Whiting, An empirical approximation to the Voigt profile. J. Quant. Spectrosc. Radiat. Transfer 8(6), 1379–1384 (1968)
K. Levenberg, A method for the solution of certain problems in least squares. Q. Appl. Math. 2, 164–168 (1944)
L.S. Rothman, I.E. Gordon, A. Barbe, D.C. Benner, P.F. Bernath, M. Birk, V. Boudon, L.R. Brown, A. Campargue, J.-P. Champion, The HITRAN 2008 molecular spectroscopic database. J. Quant. Spectrosc. Radiat. Transfer 110, 533–572 (2009)
S. Hunsmann, S. Wagner, H. Saathoff, O. Möhler, U. Schurath, V. Ebert, Messung der Temperaturabhängigkeit der Linienstärken und Druckverbreiterungskoeffizienten von H2O-Absorptionslinien im 1.4 μm-Band. VDI-Berichte 1959, 149–164 (2006)
Acknowledgments
The IGF project 15970 N/3 of the research association Forschungskuratorium Maschinenbau e.V.–FKM, Lyoner Straße 18, 60528 Frankfurt, was funded via the AiF within the scope of the program for the promotion of the Industrielle Gemeinschaftsforschung und -entwicklung (IGF) by the Federal Ministry of Economy and Technology on the basis of a decision of the German Federal Parliament. The authors also thank Dennis Bensing from the Institute for Combustion and Gasdynamics at the University of Duisburg-Essen for his work in the construction and operation of the engine.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Witzel, O., Klein, A., Wagner, S. et al. High-speed tunable diode laser absorption spectroscopy for sampling-free in-cylinder water vapor concentration measurements in an optical IC engine. Appl. Phys. B 109, 521–532 (2012). https://doi.org/10.1007/s00340-012-5225-0
Received:
Revised:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00340-012-5225-0