
Abstract
The traditional method of identifying wildlife habitat distribution over large regions consists of pixel-based classification of satellite images into a suite of habitat classes used to select suitable habitat patches. Object-based classification is a new method that can achieve the same objective based on the segmentation of spectral bands of the image creating homogeneous polygons with regard to spatial or spectral characteristics. The segmentation algorithm does not solely rely on the single pixel value, but also on shape, texture, and pixel spatial continuity. The object-based classification is a knowledge base process where an interpretation key is developed using ground control points and objects are assigned to specific classes according to threshold values of determined spectral and/or spatial attributes. We developed a model using the eCognition software to identify suitable habitats for the Grasshopper Sparrow, a rare and declining species found in southwestern Québec. The model was developed in a region with known breeding sites and applied on other images covering adjacent regions where potential breeding habitats may be present. We were successful in locating potential habitats in areas where dairy farming prevailed but failed in an adjacent region covered by a distinct Landsat scene and dominated by annual crops. We discuss the added value of this method, such as the possibility to use the contextual information associated to objects and the ability to eliminate unsuitable areas in the segmentation and land cover classification processes, as well as technical and logistical constraints. A series of recommendations on the use of this method and on conservation issues of Grasshopper Sparrow habitat is also provided.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
Introduction
The Grasshopper Sparrow (Ammodramus savannarum) is a small-sized grassland passerine bird found mainly in central and eastern United States and in southern Canada where it reaches its northern limits (Vickery 1996). Although widely distributed, this species is restricted to specific habitats and is relatively uncommon throughout parts of its range. In the East, it generally inhabits dry open fields with scattered perch sites such as low shrubs, fenceposts, and robust perennial plant species (e.g., common mullein [Verbascum thapsus]) and may be found in a range of grasslands with similar habitat structure such as old fields, pastureland, and hayfields (Vickery 1996), generally in large (>10 ha) tracts of suitable habitats (Herkert 1994; Vickery and others 1994; Helzer and Jelinski 1999).
Largely restricted to the prairies of western Canada and United States, native grasslands were also present in northeastern North America prior to European settlement, with sustainable populations of grassland bird species likely occupying marginal sites (Askins 1999; Norment 2002). Forest clearing for agriculture provided additional habitats for these species which expended their range up until the middle of the past century. Grassland habitat loss and fragmentation due to intensification of agriculture, conversion to row crops and plantation, and land abandonment reversed this trend making grassland birds the species guild showing the steepest decline of all groups of breeding birds in North America (Brennan and Kuvlesky 2005; Sauer and others 2005). As such, the population of the Grasshopper Sparrow has declined in eastern Canada and elsewhere in eastern North America (Askins 1993; Herkert 1994, 1995). The North American Breeding Bird Survey (BBS) data (Sauer and others 2005) indicate a significant population decline in the United States (−3.8% per year) and Canada (−5.8%) between 1966 and 2005; this decline was well detected in the northeastern United States (USFWS Northeast Region no. 5; −5.2%) and in Ontario (−2.9%) (data too scarce for a reliable trend estimate for Québec). The Grasshopper Sparrow is recognized as a species of moderate concern in the Lower Great Lakes/St. Lawrence Plain Bird Conservation Region (Hartley 2007) and the subspecies A. s. pratensis is now listed as endangered, threatened, or of special concerns in several states and provinces (see Vickery 1996 and references therein). In southwestern Québec where it is listed as a species likely to be designated as threatened or vulnerable, this sparrow was formerly found in hayfields and old fields in several regions but is now almost restricted to the Pontiac region west of the Ottawa-Gatineau metro region where large extents of grassland still prevail (Jobin 2003; Jobin and others 2005).
Because species endangerment and the decline in bird populations are most often associated with habitat loss (Askins 1993; Kerr and Cihlar 2004), it is essential to know where suitable habitats occur in the landscape in order to achieve landscape-level population analyses and conservation actions. With the advent of remotely-sensed images, computers, and GIS softwares in past decades, mapping wildlife habitat distribution over large regions generally consisted of developing models of suitable habitat distribution following a traditional suite of actions: (1) acquiring remotely-sensed images related to the area extent of the study region (such as Landsat-TM satellite images), (2) perform a pixel-based supervised or unsupervised classification of the images using the spectral information of selected spectral bands by using a maximum likelihood algorithm, (3) transfer the pixel-based classification in a GIS software, (4) define species-specific habitat criteria that fulfill selected habitat classes or spatial indices, (5) locate on the images suitable habitat patches or landscape context, (6) perform field validation to evaluate the accuracy of the model (Palmeirim 1988; Hatten and Paradzick 2003; Niemuth 2003; Jackson and others 2005; Jobin and others 2005). Although powerful to locate suitable habitats over vast regions (Scott and others 1993; Grenier and others 1994; Dettmers and Bart 1999), important resources are needed in terms of ground-control points acquisition, computer work, and field validation to classify entire images and produce reliable maps of potential habitat for the species under study.
Object-based classification is a relatively new method that can achieve the same objective using additional information from remotely-sensed images. This process is usually very fast because image objects rather than individual pixels are assigned to specific classes (Jensen 2005). This approach is based on the segmentation of the image that creates polygons or segments that are homogeneous with regard to spatial or spectral characteristics (Ryherd and Woodcock 1996; Jensen 2005). An added value of object-based classification lies in the segmentation algorithm that does not solely rely on the single pixel spectral values, but also on its texture and pixel spatial continuity; i.e., those of the surrounding (contextual) pixels which may facilitate the discrimination of habitats with similar vegetation structures (Townshend and others 2000; Blaschke and Strobl 2001; Burnett and Blaschke 2003). This method is a knowledge base process where an interpretation key is developed using ground control points or complementary data, and objects (polygons) are then assigned to specific classes according to threshold values of determined spectral and/or spatial attributes from which membership statistical functions are built. A fuzzy classification may also be performed on the image. The basic idea of fuzzy logic is to replace the two Boolean logical statements, “true” and “false”, by a continuous range, where 0 means “false” and 1 means “true”, and all values between 0 and 1 represent a continuum of probability to be classified as true or false (Benz and others 2004). In brief, this method classifies objects instead of pixels which are ecologically relevant in landscape analysis because habitat patches can be readily delineated with object-based analysis (Laliberté and others 2004; Bock and others 2005). We present the application of this alternative method to delineate suitable habitats for the Grasshopper Sparrow. We adapted the method used for wetland mapping in the course of the Canadian Wetland Inventory project (Grenier and others 2007) using the software eCognition (Baatz and others 2004). The model was developed from field data collected in a region where the species is known to occur and applied to regions where the species has formerly bred in an attempt to produce a map of potential breeding habitats.
Study Area
This study was conducted in soutwestern Québec in the St.Lawrence Lowlands ecoregion where the landscape is highly dominated by agriculture activities (Fig. 1). The western portion of the St. Lawrence Valley in the Greater Montréal and Montérégie regions has been affected by considerable human perturbations over past centuries through deforestation and, in recent decades, through intensification of agriculture. The transition from traditional farming to intensive agriculture has greatly contributed to landscape changes in that region (Bélanger and Grenier 2002), causing a predominance of annual crops (corn, soybean) and a concomitant reduction in traditional dairy farming (Domon and others 1993; Statistics Canada 1997; Jobin and others 2003). Several historic Grasshopper Sparrow breeding sites were located in the Montérégie region but most have been destroyed because of agriculture intensification (Canadian Wildlife Service – Québec Region, unpubl. data).

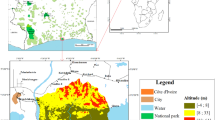
Map of the study area in southern Québec showing the Shawville region where the model of Grasshopper Sparrow breeding habitat was developed and the Hull, Laurentides, and Montérégie regions where the model was applied
Compared with other regions of southern Québec, the Laurentides and Outaouais (including Hull and Shawville) regions are also highly cultivated but with a predominance of dairy farming and beef cattle production, especially in the Pontiac region west of Gatineau (Hull) which is the most important beef cattle production region in Québec (Jobin and others 2005). The mosaic of pastureland and hayfields thus offers a markedly different landscape than in the annual crop dominated Montérégie region. Now absent from the Laurentides region, Grasshopper Sparrows still breed in the Pontiac region where 20 sites have been discovered in 2004 following thorough ground surveys (Jobin and Falardeau 2005).
Methods
We adopted a two-step approach to delineate potential sparrow habitats in southwestern Québec. A model was developed in the Shawville area located in the Pontiac region where Grasshopper Sparrows still breed. Firstly, using the 20 known breeding sites used in 2004 as reference sites to orient the classification, threshold values of selected attributes were determined to develop membership statistical functions that would include all “Sites with sparrows” while minimizing the number of patches that would be selected with these values. Secondly, we applied these membership functions (attribute values) to other subimages covering the adjacent Hull, Laurentides, and Montérégie regions where potential breeding habitats may be present (Fig. 1).
Image Pretreatment
Landsat-7 (ETM sensor) images were used to develop and test our habitat model. We chose Landsat images because a single scene covers a large area (30,525 km2), the spectral definition in the near and middle infrared is better than other sensors like SPOT to catch information about vegetation, such as agricultural lands (Jensen 2005), the higher spatial resolution (15 m) of the panchromatic band of the ETM sensor allows the enhancement of the spatial resolution of the multispectral bands (30 m) using pansharpening (Zhang 2002), and it is possible to get multi-date images (spring and summer) over the same area from already available images. Spring and summer images were used to better discriminate annual and perennial crops (Homer and others 2004; Fisette and others 2006). The combination of spring images, where cropfields have no vegetation cover, with summer images, where vegetation cover is maximal, increases the possibility to distinguish annual cropfields from perennial crops. Images covering the Shawville/Hull region were acquired on 5 May and 25 August 2001, those of the Laurentides region were acquired on 24 April 2001 and 20 July 2002, and those of the Montérégie region were acquired on 8 June and 11 August 2001. These images were then orthorectified and georeferenced in the UTM-NAD 83 projection (zone 17 and 18). The spectral information of all spectral bands was used in the project (bands 1 to 5, band 7 and panchromatic). The project also used pansharpened images of bands 2, 3, 4, and 5 (processed in PCI Geomatica ©) to increase the spatial resolution and to improve the segmentation process, hence aiming at better defined objects, using the panchromatic band as spatial reference and bands 2, 3, and 4 as spectral reference. This procedure concerns the fine spatial characteristics of the patterns observable in the panchromatic band such as spatial patterns or local intensities and variations, and is recommended by the eCognition developers (Baatz and others 2004; Sohlbach 2004). Subimages were analyzed to eliminate regions where no potential habitat was expected (highly forested regions). Total coverage under study was 4763 km2, 5187 km2, 5426 km2 and 8023 km2, respectively, for the Shawville, Hull, Laurentides, and Montérégie regions.
Model Development and Application
Object-based classification performs a multi-level and hierarchical segmentation of images following a top-down approach that creates polygons that are classified at different scales, i.e., each segmentation is followed by a classification procedure before enabling the next level of segmentation. The 20 references sites where Grasshopper Sparrows were detected in the summer of 2004 were spatially located on the Landsat image to delineate habitat patches with habitat characteristics used to derive membership functions. These functions aimed to discriminate “Sites with sparrows” from “Sites without sparrows” in an elimination procedure that intends to determine threshold values of selected attributes that would retain all “Sites with sparrows” while minimizing the number of remaining patches that would be selected with these values.
To build the model, the first segmentation level of the Shawville image (Table 1) was to adjust the “Scale” parameter to discriminate agricultural lands from all other land cover types (wetland, forest, anthropogenic, water) using membership functions (Table 2). At this level, all agricultural lands were considered as potential habitats. The second level of segmentation was applied to all the “Potential sites” and the classification aimed at eliminating unsuitable sites not identified in the first level, as well as cropfields. A third level of segmentation was needed to divide contiguous fields that had different spectral and textural information. Only polygons that were not classified as “cropfields” underwent this process.
In general, radiometric corrections of images are needed when model attributes are applied to different regions or dates. An emphasis was therefore given to retain spectral band ratios when developing membership functions because these ratios better eliminate the effect of atmospheric noise than actual mean spectral band values (Jensen 2005) and have been useful for grassland area delineation (Lauver and Whistler 1993). Only spring images were used during the first and second levels of the segmentation, but spring and summer images were used for the third level of segmentation and for all levels of the classification process. Bands 4, 5, and 7 were the most useful for obtaining information about agriculture fields, especially bands 4 and 5 for identifying potential Grasshopper Sparrow habitat, because vegetation indexes often primarily use the information from the near infrared (ETM4) and middle infrared (ETM5) to extract the vegetation content of images (e.g., NDVI, NDMI, Tasseled cap components with the highest weights on ETM4 and ETM5).
Segmentation and membership functions from this model were then applied to other subimages covering the Hull, Laurentides, and Montérégie regions. Some adjustments of threshold values of membership functions were needed to eliminate urban areas on the Hull and Laurentides subimage. No attribute had been retained to readily eliminate this land cover type from the Shawville image where the model was developed and which covered an agricultural landscape lacking large urban areas (Table 3). Selected habitat patches in these regions, i.e., those retained as “Sites with sparrows” after the adjusted membership functions were applied, would thus constitute potential habitats for the Grasshopper Sparrow. As for the image covering the Montérégie region, the “Scale” parameter needed to be modified from 150 to 250 in the first level of segmentation to obtain a segmentation mosaic similar to the one obtained on the Shawville/Hull image. Membership functions applied directly on this image selected large sites located in open water and forested areas. Adjustments to threshold values, and addition or removal of attributes, were therefore of a higher magnitude because the landscape pattern is markedly different in that region and to adjust for radiometry differences across subimages (Table 3).
Field validation of randomly selected potential habitat patches in the Shawville/Hull and Laurentides regions was conducted in May and June 2006, excluding fields used as reference sites. Fields visited for the validation were visually classified as being of low, medium or good potential for the Grasshopper Sparrow based on known breeding habitat parameters for this species in eastern North America (Vickery 1996; Dechant and others 1998) and from our personal experience with the breeding habitat acquired through field surveys in the summers of 2004 and 2005. We determined that cropfields (corn, cereals, soybean, vegetables) offered no potential because no vegetation cover is available for nesting birds in early spring because these fields are ploughed on an annual basis. However, we determined that all fields with perennial covers had some potential for the Grasshopper Sparrow.
Potential sparrow habitats were categorized as being of low quality if they were covered with high-quality forage crops such as hayfields or seeded pastures, offered no perch sites, and were likely to be mowed annually. Fields with medium quality were forage crops located on poor sandy soil where drainage is generally good, were less densely covered by perennial cover, and offered a heterogeneous structure with alternating dense and sparse vegetation clumps. Fields classified as good-quality sites were very poor and dry fields or recently abandoned fields located on poor soils, presented an even scarcer and more heterogeneous vegetation structure compared to medium-quality fields, and held several perch sites sought after by this species (Vickery 1996) such as shrubs, fenceposts, and robust herbaceous plants such as the common mullein indicating that these fields were not mowed or heavily grazed on a regular basis.
Landscape metrics describing each selected patch with respect to their size and shape were calculated using the eCognition software (Baatz and others 2004) and mean values were compared among regions to evaluate their similarity in terms of patch configuration and landscape patterns. We used the nonparametric Kruskal-Wallis test (variables not normally distributed and variances were not homogeneous); significant differences were followed by pairwise comparisons (Zar 1996).
Results
The numbers of polygons per km2 that resulted from the 3-level segmentation in each subimage was highest for the Laurentides (1.7 polygon/km2) and the Shawville (1.5 polygon/km2) subimages, and lowest for the Montérégie (1.2 polygon/km2) and the Hull (1.0 polygon/km2) subimages. Application of membership functions to subimages resulted in the selection of relatively more polygons in the Shawville subimage (2.1%; n = 153) (Table 4) where the model was developed than in the Hull (1.4%; n = 72) and Laurentides subimages (0.8%; n = 75). No polygon was selected in the annual crop dominated Montérégie subimage, despite numerous adjustments and selective trials of distinct threshold values.
Overall, 32% (n = 49), 57% (n = 41), and 47% (n = 35) of all selected polygons were visited for field validation in the Hull, Laurentides, and Shawville regions, respectively, and approximately 90% of those showed some potential for breeding Grasshopper Sparrows, i.e., nearly all selected fields were covered by perennial cover (hayfield, pasture, old field) (Table 4). However, the potential of these fields for breeding Grasshopper Sparrows varied among regions (Table 5). Five medium and seven high-quality sites were located in the Shawville region (28% of all visited sites) where known Grasshopper Sparrow breeding sites occur, whereas only two sites of each medium and high-quality sites (10%) and three medium-quality sites (10%) were located in the Hull and Laurentides regions, respectively.
Mean values of all landscape metrics associated with the shape of selected patches were similar among all three regions (Table 6). Selected patches in the Laurentides region were larger (12.5 ha) than those in the Shawville and Hull regions (10 ha). Between 42% and 57% of selected patches were larger than 10 ha in each region; these proportions increase to 78% and 85% for patches larger than 5 ha.
Discussion
Object-based classification as a method to delineate suitable wildlife habitats on remotely-sensed images allowed us to readily eliminate unsuitable areas in the early segmentation process, thus focussing the classification on remaining portions of the image deemed suitable for the species under study, and we were successful in locating several additional potential Grasshopper Sparrow breeding sites in the region (Shawville) where this species nests. Although most suitable breeding sites presumably present in the Shawville region had been previously mapped (Jobin and Falardeau 2005), our model allowed us to locate other suitable sites that had been missed during the roadside surveys or discarded because of their small size or high shrub density. Several sites were concentrated in areas that had not been previously visited by field crews. Interestingly, most selected sites were larger than 10 ha, and almost all were >5 ha. Past studies revealed that the reproductive success and breeding activity of Grasshopper Sparrows was reduced in fields smaller than 5–10 ha (Helzer and Jelinski 1999; Balent and Norment 2003), and mean cover of our 20 references sites where Grasshopper Sparrows were detected was 16 ha, with a minimum size of 5 ha. This suggests that most selected fields were large enough to support breeding pairs of this species. We did not actually survey for Grasshopper Sparrows at these sites because field validation was completed after the peak of breeding activities. These sites should, however, deserve further attention in coming years to determine their use by this species.
Minor adjustments to the model’s threshold values of segmentation attributes and membership functions were needed when applied on the Hull and Laurentides subimages to account for dissimilar landscapes around urban areas in these regions and because the Laurentides region was covered by a different Landsat scene. A few potential suitable sites for the Grasshopper Sparrow were selected in the western portion of the Hull subimage where the agricultural landscape reflecting beef cattle production mirrors that of the adjoining Shawville subimage (Jobin 2003) where the model was developed. The eastern portion of the Hull region and the Laurentides region being largely dairy oriented with seeded pasture and high-quality forage crops as the dominant agricultural production, selected sites in these regions were less suited for the Grasshopper Sparrow. The similarity among regions in terms of shape and configuration of selected patches, however, suggests that the model well-captured these landscape features known to be important in habitat selection for certain bird species (Helzer and Jelinski 1999).
No potential site was identified in the Montérégie region south and west of Montréal where the vast majority of formerly used breeding Grasshopper Sparrows habitats have been converted into annual crops. Applying membership functions from the model developed in the Shawville region to a distinct Landsat scene covering this region was not straightforward. Several adjustments were tested both at the segmentation and classification stages but we could not achieve a segmentation level that reflected the actual landscape because land use intensity and fragmentation levels largely differ between the two regions. The annual crop dominated agricultural landscape in the Montérégie region is very different from the Shawville, Hull, and Laurentides regions where dairy farming and beef cattle production prevail. Agriculture intensification has had tremendous effect on the agricultural landscape in the Montérégie region over the past 50 years with the advent of synthetic agrochemicals, subsurface drainage, larger machineries, and changing crop types. Pasture and hayfields have been largely converted into annual crops (Domon and others 1993; Statistics Canada 1997; Jobin and others 2003) leaving very few perennial cropfields which were unsuitable for breeding Grasshopper Sparrows, as none fulfilled the selection criteria. Our approach would undoubtedly have been greatly enhanced if we had included reference sites from the Montérégie region but the Grasshopper Sparrow is now known to breed in only two sites in this region which is largely inadequate to develop a reliable model.
Most selected sites were hayfields, pastureland and old fields. As with the traditional image classification (Shriver and Vickery 1999; Oetter and others 2000; SCF and others 2004), it was difficult to discriminate these land uses of perennial cover using object-based classification of Landsat images because the pixel size of 30 m does not allow fine-scale details of the landscape, such as vegetation heterogeneity and height, to be captured by the sensor. Although the differential biomass and dry matter content of these habitats may allow their discrimination (Lauver and Whistler 1993; Girard and others 1994), reliable classification of pastureland, forage crops and oldfields using Landsat-TM images is difficult (Cox and others 1994). These habitats are thus often aggregated into one general habitat class of perennial grass cover (Palmeirim 1988; Oetter and others 2000; SCF and others 2004). Many selected sites had high coverage of annual crops likely because of crop rotation, whereas others were densely covered by shrubs presumably because of vegetation succession following land abandonment after image acquisition. To accurately map these habitats, numerous ground control points collected the same year as image acquisition are therefore generally needed because of crop rotation. Landsat-TM images may therefore not be best suited for such detailed analysis in dynamic agricultural landscapes. Classification of finer-scale remotely-sensed images such as IKONOS or Quickbird (Laliberté and others 2004; Wang and others 2004; Hájek 2005), or hyperspectral imagery (Harken and Sugumaran 2005) could have resulted in better field definition, although high resolution images are generally more heterogeneous which may affect the delineation of habitat patches and the classification (Goetz and others 2003; Bock and others 2005). In addition, the area coverage of such images is small compared to Landsat-TM and they are generally used for habitat analysis at the local scale (see Lauver and others 2002) which calls for a necessary compromise between pixel resolution, image coverage, and associated costs.
Interest in object-based classification approach is rapidly growing and has allowed the development of several accurate habitat models for both wildlife species and landscape-level analyses (Burnett and Blaschke 2003; Gitas and others 2004; Bock and others 2005; Harken and Sugumaran 2005; Whiteside and Ahmad 2005). It is currently used to map wetland habitats in Canada (Grenier and others 2007) and to locate habitats of the endangered Piping Plover in Québec and Cuba (Canadian Wildlife Service, unpublished data). Our model allowed us to locate potential breeding sites of the Grasshopper Sparrows unknown to us, several of which were large (> 10 ha). In addition, other suitable sites not picked out by the model were localized while driving between sites during the validation phase. The model was developed using reference sites where Grasshopper Sparrows were detected in the Shawville region in 2004. This species, however, was absent from sites surveyed in 2004, although the habitat seemed appropriate, likely because the carrying capacity of the region exceeded the local population size leaving several suitable sites devoid of the species; this is often the case with rare species (Sperduto and Congalton 1996; Hall and others 1997). As pointed out by Thompson and others (2006), the full range of habitat conditions of the species was possibly not all included in the model which may explain why some suitable sites were not picked out by our dichotomous approach of retaining “Sites with sparrows” while eliminating “Sites without sparrows.” Other spatial layers of geographical or environmental information such as soil type, surficial deposits, or urban areas, could also have been added to the model to complete the classification process or used as “spatial filters” to fine-tune the identification of potential sites (Thompson and others 2006). We are, however, confident that our object-based classification approach is well-suited to locate potential habitats in areas where reference sites originate and may help orient search effort in regions of known potential. Moreover, the top-down segmentation and classification process can easily be adapted to different landscapes with only minor adjustments. We cannot prescribe the use of object-based classification over the traditional pixel-based approach because we did not test the efficiency of both approaches at delineating Grasshopper Sparrow habitats in the same study region using similar Landsat images. We, however, advocate that object-based classification should be considered as an alternative approach to the traditional pixel-based classification to identify potential habitat of wildlife species as long as adequate reference sites of wildlife use can be gathered in the study region and that remotely-sensed images covering the study region are available.
Recommendations
The potential of object-based classification to study wildlife-habitat relationships and develop landscape-level models of potential wildlife habitat distribution is far-reaching. We recommend this approach to be considered and tested by wildlife practitioners, biologists, and landscape ecologists. Increased application of this approach will improve model development procedures, aid in the identification of adequate membership statistical functions, and refine scale parameters used within the multi-level segmentation and classification processes. Developing a habitat model in a region with adequate reference sites followed by its application to adjacent regions was efficient but was not without technical and logistical constraints. To stimulate discussions and improve the use of this approach, we recommend that:
-
(1)
Image type should be chosen, given the habitat and landscape under study and the area extent of the study region;
-
(2)
Segmentation parameters and multi-level processes should be adjusted to the object of interest and adapted to the landscape pattern, i.e., the habitat patches under study;
-
(3)
Attributes that minimize radiometric, atmospheric, and temporal effects across images should be selected. Such attributes include spectral band ratios and indices (ex. NDVI);
-
(4)
It is imperative to have good and precise reference sites (both occupied and nonoccupied) associated with the species of interest in the images under analysis to select unbiased model attributes;
-
(5)
Field (on-site) validation of selected site is essential to validate and fine-tune the habitat model;
-
(6)
Temporal gap between image acquisition and field visit should be minimized, especially in dynamic agricultural landscapes, because land cover may greatly vary between years due to crop rotation;
-
(7)
Object-based and pixel-based classifications of wildlife habitat should be performed on a designated study region to compare their efficiency and to identify pros and cons of each approach.
Because urban sprawl and corn production are rapidly expanding in the Pontiac region (Jobin 2003), conservation and stewardship activities aimed at securing large and extensive tracks of Grasshopper Sparrow breeding habitats on both public and private lands is largely acknowledged (Herkert 1994; Vickery and others 1994; Sample and Mossman 1997; Dechant and others 1998; Johnson and Igl 2001) and should be given high priority in this region. As observed in the Laurentides and Montérégie regions, most formerly occupied sites have been converted into cropfields in areas where soil quality can support cereal production whereas farm abandonment has encouraged pine plantation on low-quality sandy soils. The small remaining Grasshopper Sparrow population in the Pontiac region is thus at risk and only adequate farming practices and conservation activities may prevent this species from following the trend observed in the Montérégie region and disappear from this region.
References
Askins RA (1993) Population trends in grassland, shrubland, and forest birds in eastern North America. Current Ornithology 11:1–34
Askins RA (1999) History of grassland birds in eastern North America. Studies in Avian Biology 19:60–71
Baatz M, Benz U, Dehghani S, Heynen M, Höltje A, Hofmann P, Lingenfelder I, Mimler M, Sohlbach M, Weber M, Willhauck G (2004) eCognition Professional: User guide 4.; Munich, Germany: Definiens-Imaging
Balent KL, Norment CJ (2003) Demographic characteristics of a grasshopper sparrow population in a highly fragmented landscape of western New York state. Journal of Field Ornithology 74:341–348
Bélanger L, Grenier M (2002) Agriculture intensification and forest fragmentation in the St. Lawrence valley, Québec, Canada. Landscape Ecology 17:495–507
Benz UC, Hofmann P, Willhauck G, Lingenfelder I, Heynen M (2004) Multi-resolution, object – oriented fuzzy analysis of remote sensing data for GIS-ready information. ISPRS Journal of Photogrammetry & Remote Sensing 58:239–258
Blaschke T, Strobl J (2001) What’s wrong with pixels? Some recent developments interfacing remote sensing and GIS. GIS— Zeitschrift für Geoinformationssysteme 6:12–17
Bock M, Rossner G, Wissen M, Remm K, Langanke T, Lang S, Klug H, Blaschke T, Vrscaj B (2005) Spatial indicators for nature conservation from European to local scale. Ecological Indicators 5:322–338
Brennan LA, Kuvlesky WP Jr. (2005) North American grassland birds: an unfolding conservation crisis? Journal of Wildlife Management 69:1–13
Burnett C, Blaschke T (2003) A multi-scale segmentation/object relationship modelling methodology for landscape analysis. Ecological Modelling 168:233–249
Cox J, Kautz R, MacLaughlin M, Gilbert T (1994) Closing the Gaps in Florida’s Wildlife Habitat Conservation System. Florida Game and Fresh Water Fish Commission, Tallahassee. http://www.floridaconservation.org/oes/habitat_sec/Closing_Gaps.pdf. Accessed September 2006
Dechant JA, Sondreal ML, Johnson DH, Igl LD, Goldade CM, Nenneman MP, Euliss BR (1998) (revised 2002). Effects of management practices on grassland birds: Grasshopper Sparrow. Northern Prairie Wildlife Research Center, Jamestown, ND. 28 p
Dettmers R, Bart J (1999) A GIS modeling method applied to predicting forest songbird habitat. Ecological Applications 9:152–163
Domon G, Bouchard A, Gariépy M (1993) The Dynamics of the Forest Landscape of Haut-Saint-Laurent (Quebec, Canada): Interactions Between Biophysical Factors, Perceptions and Policy. Landscape and Urban Planning 25:53–74
Fisette T, Chenier R, Maloley MP, Gasser PY, Huffman T, White L, Ogston R, Elgarawany A (2006) Methodology for a Canadian Agricultural Land Cover Classification. Proceedings of the 1st International Conference on Object-based Image Analysis. July 4–5 2006, Salzburg, Austria
Girard CM, Le Bas C, Szujecka W, Girard MC (1994) Remote Sensing and Fallow Land. Journal of Environmental Management 41:27–38
Gitas IZ, Mitri GH, Ventura G (2004) Object-based image classification for burned area mapping of Creus Cape, Spain, using NOAA-AVHRR imagery. Remote Sensing of Environment 92:409–413
Goetz SJ, Wright RK, Smith AJ, Zinecker E, Schaub E (2003) IKONOS imagery for resource management: Tree cover, impervious surfaces, and riparian buffer analyses in the mid-Atlantic region. Remote Sensing of Environment 88:195–208
Grenier M, Bordage D, Plante N (1994) La télédétection, un complément avantageux aux inventaires pour évaluer la répartition de la sauvagine sur de vastes territoires. Canadian Journal of Remote Sensing/Journal canadien de télédétection 20:162–170
Grenier M, Demers A-M, Labrecque S, Benoit M, Fournier R, Drolet B (2007) An object-based method to map wetland using RADARSAT-1 and Landsat-ETM images: test case on two sites in Québec, Canada. Canadian Journal of Remote Sensing. In press
Hájek F (2005) Object-oriented classification of remote sensing data for the identification of tree species composition. Proceedings of ForestSat 2005 conference, May 31 - June 3, 2005, Boras, Sweden
Hall LS, Krausman PR, Morrison ML (1997) The habitat concept and a plea for standard terminology. Wildlife Society Bulletin 25:173–182
Harken J, Sugumaran R (2005) Classification of Iowa wetlands using an airborne hyperspectral image: a comparison of the spectral angle mapper classifier and an object-oriented approach. Canadian Journal of Remote Sensing 31:167–174
Hartley MJ (2007) Bird Conservation Plan for the Lower Great Lakes/St. Lawrence Plain Bird Conservation Region (BCR 13). U.S. Fish & Wildlife Service, Atlantic Coast Joint Venture. Hadley, Massachusetts. 85 p
Hatten JR, Paradzick CE (2003) A multiscaled model of southwestern willow flycatcher breeding habitat. Journal of Wildlife Management 67:774–788
Helzer CJ, Jelinski DE (1999) The Relative Importance of Patch Area and Perimeter-Area Ratio to Grassland Breeding Birds. Ecological Applications 9:1448–1458
Herkert JR (1994) The effects of habitat fragmentation on midwestern grassland bird communities. Ecological Applications 4:461–471
Herkert JR (1995) An Analysis of Midwestern Breeding Bird Population Trends: 1966–1993. American Midland Naturalist 134:41–50
Homer C, Huang C, Yang L, Wylie B, Coan M (2004) Development of a 2001 National Land-cover Database for the United States. Photogrammetric Engineering and Remote Sensing 70:829–840
Jackson VL, Laack LL, Zimmerman EG (2005) Landscape metrics associated with habitat use by ocelots in south Texas. Journal of Wildlife Management 69:733–738
Jensen JR (2005) Introductory digital image processing: a remote sensing perspective/ John R. Jensen. Third edition, Pearson Education, Inc. Upper Saddle River, NJ, 526 p
Jobin B (2003) Cartographie des habitats agricoles dans la région de l’Outaouais: Une région d’intérêt pour la pie-grièche migratrice (Lanius ludovicianus). Le Naturaliste canadien 127:26–35
Jobin B, Falardeau G (2005) Le Bruant sauterelle sort de l’ombre. Québec Oiseaux 16:14–15
Jobin B, Beaulieu J, Grenier M, Bélanger L, Maisonneuve C, Bordage D, Filion B (2003) Landscape Changes and Ecological Studies in Agricultural Regions, Québec, Canada. Landscape Ecology 18:575–590
Jobin B, Grenier M, Laporte P (2005) Using satellite imagery to assess breeding habitat availability of the endangered Loggerhead Shrike in Québec. Biodiversity and Conservation 14:81–95
Johnson DH, Igl LD (2001) Area requirements of grassland birds: a regional perspective. Auk 118:24–34
Kerr JT, Cihlar J (2004) Patterns and causes of species endangerment in Canada. Ecological Applications 14:743–753
Laliberté AS, Rango A, Havstad KM, Paris JF, Beck RF, McNeely R, Gonzalez AL (2004) Object-oriented image analysis for mapping shrub encroachment from 1937 to 2003 in southern New Mexico. Remote Sensing of Environment 93:198–210
Lauver CL, Whistler JL (1993) A hierarchical classification of Landsat TM imagery to identify natural grassland areas and rare species habitat. Photogrammetric Engineering and Remote Sensing 59:627–634
Lauver CL, Busby WH, Whistler JL (2002) Testing a GIS model of habitat suitability for a declining grassland bird. Environmental Management 30:88–97
Niemuth ND (2003) Identifying landscapes for greater prairie chicken translocation using habitat models and GIS: a case study. Wildlife Society Bulletin 31:145–155
Norment C (2002) On grassland bird conservation in the Northeast. Auk 119:271–279
Oetter DR, Cohen WB, Berterretche M, Maiersperger TK, Kennedy RE (2000) Land cover mapping in an agricultural setting using multiseasonal Thematic Mapper data. Remote Sensing of Environment 76:139–155
Palmeirim JM (1988) Automatic mapping of avian species habitat using satellite imagery. Oikos 52:59–68
Ryherd S, Woodcock CE (1996) Combining spectral and texture data in the segmentation of remotely sensed images. Photogrammetric Engineering and Remote Sensing 62:181–194
Sample DW, Mossman MJ (1997) Managing habitat for grassland birds: a guide for Wisconsin. Wisconsin Department of Natural Resources, Madison, WI. 154 p
Sauer JR, Hines JE, Fallon J (2005) The North American Breeding Bird Survey, Results and Analysis 1966–2005. Version 6.2.2006. USGS Patuxent Wildlife Research Center, Laurel, MD. Internet site: http://www.mbr-pwrc.usgs.gov/bbs/. Accessed September 2006
SCF (Service canadien de la faune), Faune Québec, CIC, MRNFP, MAPAQ, AAC, and CSL (2004) Occupation du sol à partir des images classifiées Landsat-7, Sud du Québec, 1999–2003
Scott JM, Davis F, Csuti B, Noss R, Butterfield B, Groves C, Anderson H, Caicco S, D’Erchia F, Edwards TC Jr., Ulliman J, Wright RG (1993) Gap Analysis: a geographic approach to protection of biological diversity. Wildlife Monographs 123:1–41
Shriver WG, Vickery PD (1999) Aerial assessment of potential Florida Grasshopper Sparrow habitat: conservation in a fragmented landscape. Florida Field Naturalist 27:1–36
Sohlbach M (2004) Wetland Analysis with eCognition – A Guideline. Definiens Imaging GmbH. Report prepared for Environment Canada for the Canadian Wetland Inventory, Munich
Sperduto MB, Congalton RG (1996) Predicting rare orchid (small whorled pogonia) habitat using GIS. Photogrammetric Engineering and Remote Sensing 62:1269–1279
Statistics Canada (1997) Historical overview of Canadian agriculture. Statistics Canada. Catalogue number 93–358-XPB, Ottawa, Canada. 253 p
Thompson LM, van Manen FT, Schlarbaum SE, DePoy M (2006) A Spatial Modeling Approach to Identify Potential Butternut Restoration Sites in Mammoth Cave National Park. Restoration Ecology 14:289–296
Townshend JRG, Huang C, Kalluri S, DeFries R, Liang S, Yang K (2000) Beware of Per-pixel Characterization of Land Cover. International Journal of Remote Sensing 21:839–843
Vickery PD (1996) Grasshopper Sparrow (Ammodramus savannarum). In Poole A, Gill F (eds.), The Birds of North America. No. 239. The Academy of Natural Sciences. Philadelphia. PA. and The American Ornithologists’ Union. Washington. D.C
Vickery PD, Hunter ML Jr, Melvin SM (1994) Effect of habitat area on the distribution of grassland birds in Maine. Conservation Biology 8:1087–1097
Wang L, Sousa WP, Gong P, Biging GS (2004) Comparison of IKONOS and QuickBird images for mapping mangrove species on the Caribbean coast of Panama. Remote Sensing of Environment 91:432–440
Whiteside T, Ahmad W (2005) A comparison of object-oriented and pixel-based classification methods for mapping land cover in northern Australia. Pages 1225–1231 in Proceedings of SSC2005 Spatial intelligence, innovation and praxis: The national biennial Conference of the Spatial Sciences Institute, September 2005. Melbourne: Spatial Sciences Institute
Zar JH (1996) Biostatistical analysis. Prentice Hall, Upper Saddle River, N.J. 662 p
Zhang Y (2002) A new automatic approach for effectively fusing Landsat 7 as well as IKONOS images. Proceedings of the International Geoscience and Remote Sensing Symposium IEEE/IGARSS’02, Toronto, Canada, 24–28 June 2002
Acknowledgments
We thank Martine Benoit for her help with GIS work and data processing and Claudie Latendresse and Guillaume Tremblay for field assistance. Daniel St-Hilaire provided valuable information on the Grasshopper Sparrow’s historical and current distribution in the Pontiac region. We thank two anonymous reviewers for their valuable comments on the manuscript. Our sincere thanks also go to every landowner for granting us access to their property. Financial support was provided by the Canadian Wildlife Service, Québec Region, Environment Canada.
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Jobin, B., Labrecque, S., Grenier, M. et al. Object-Based Classification as an Alternative Approach to the Traditional Pixel-Based Classification to Identify Potential Habitat of the Grasshopper Sparrow. Environmental Management 41, 20–31 (2008). https://doi.org/10.1007/s00267-007-9031-0
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00267-007-9031-0