
Abstract
Pulsating heat pipes (PHPs) have promised to be effective heat spreaders. From the fabrication perspective, the PHPs are less intensive than their conventional counterparts. Despite the advantages, there still exists shortage of data in both experimental and analytical domains towards reliable design and prediction of PHP performance. In this study, a flat plate closed loop PHP has been experimentally investigated for its thermal performance. The PHP with 12 channels, each 2.2 mm deep × 2.0 mm wide, was tested with deionized water for a fill ratio of 70% by volume for various orientations starting from vertical evaporator below condenser (90°) to near horizontal (7.5°) orientation for a single heat load of 50 W to calibrate the test setup against published literature. The PHP was also tested for methanol with various fill ratios (30, 40, 50, 60 and 70%) for 50 W. The best performing fill ratio of methanol was tested for various heat loads (10 to 100 W) for the vertical and the near horizontal orientation. An attempt has been made to resolve the critical angle after which the PHP ceases to perform when tilted towards horizontal orientation. The PHP performance as expected was best at the 90° (vertical) orientation with very little deterioration up to 45°. The thermal resistances were estimated for two fluids, for various orientations, heat loads and fill ratios. The results indicate that at near horizontal orientation methanol performed better than water for 70% fill ratio. The 40% fill ratio of methanol yielded the least thermal resistance for all orientations. Also the thermal resistance of the PHP decreased with increasing heat load for different orientations. The PHP operated successfully up to 7.5–10° below which the PHP was observed to have dry out.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
1 Introduction
The ever increasing electronic device performance coupled with the desire to have smaller and handier gadgets has led to increased heat loads being dissipated within lesser volumes resulting in heat fluxes of the order of 106 W/m2 [1]. However, the maximum temperature that these devices can tolerate have practically remained the same. In this scenario, it is highly important that efficient heat spreading/transport mechanisms are built in-situ with the device for their reliable operation.
Heat pipes have found their way into laptops, workstations and even desktops as means of heat transport and heat spreading [2]. The variant of the heat pipe technology – the Pulsating Heat Pipe (PHP) -- can be a useful device for cooling these electronic assemblies as they are less fabrication intensive compared to the conventional ones due to the non-requirement of exclusive capillary wick structure.
A PHP is made of a meandering tube of capillary dimensions bent back and forth parallel to itself to form several bends [3]. The PHP is first evacuated and filled with a working fluid of desired percentage by volume and sealed before operation. The ends of the tube may be connected to one another in a closed loop or may be left independent after sealing in an open loop. It is generally agreed by researchers that the closed-loop PHP has better heat transfer performance [4, 5].
In this study a closed loop PHP has been considered. A flat aluminium alloy substrate, similar to that in the work of Khandekar, et al. [6] is investigated. The dimensions correspond as closely as possible to the Setup No.1 of [6], with water and methanol as working fluids. This setup is chosen for the following reasons.
-
1.
Form factor (flat) most suitable for integration in practical electronics.
-
2.
Aluminium alloy, the most used material in terms of weight, availability and cost.
-
3.
Experiment is amenable for visualization.
-
4.
Other setups with narrower grooves (1 mm wide) make the manufacturing slightly more difficult.
Although in [6] ethanol was used, in the present study methanol was tried, as one of the salient conclusions in [6] was that the fluid with larger (dP/dT)sat enhances the performance of the PHP. It is found from [7] that methanol has larger (dP/dT)sat than ethanol apart from being better in terms of liquid thermal conductivity, dynamic viscosity and liquid specific heat capacity which are important parameters for heat transfer in PHPs.
2 Experimental setup
2.1 PHP dimensions
A flat aluminium alloy plate of 3 mm thickness was used to fabricate the prototype for evaluating the PHP performance. The channel dimensions were 2.2 mm deep and 2 mm wide as shown in Fig. 1. The distance between the channels was maintained at 2.5 mm. This yields a wall of 0.5 mm thickness separating the channels. The area for the heater earmarked on evaporator is 30 mm × 22.5 mm. A cold plate of copper being cooled by circulating water and with an area matching with that of the condenser (namely, 30 mm × 13.5 mm) is employed for the heat removal as in [6]. The channel hydraulic diameter was calculated as Dh = 4Ac/Pw = 2.1 mm. The desired hydraulic diameter for effective slug-plug formation of the working fluid is given by the Bond Number (Bo) criteria [5] of Bo <2. Hence

Inner diameter of the channel of PHP based on Bond number criteria versus temperature
As per the above Eq. (1), the Dh should be less than 5 mm for water and 3 mm for methanol. The PHP channel geometry thus can be used with either of the fluids mentioned (Fig. 2).

PHP substrate dimensions and details of evaporator and condenser
2.2 Evaporator
To apply heat load at the evaporator, two resistance heaters of flat configuration with 100 W capacity (Ohmite make - TEH100M2R00JE) were used. The two numbers of heaters each of 2 Ω resistance were used in series to have an overall resistance of 4 Ω. The two heaters were mounted on a copper plate of desired evaporator area and the assembly was fastened to the substrate by screws. The heaters were powered by Agilent make DC power supply (N5767A). As this was a constant current source the voltages were measured using multimeter (to account for the connecting wire voltage drop) to get the actual heat power dissipated and the current was finely adjusted to achieve the desired heat load at the evaporator.
2.3 Condenser
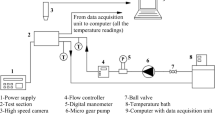
The cold plate was machined with channels from a copper block and brazed with a copper plate. The copper plate was fitted with quick disconnect couplings (QDCs) suitable for 8 mm inner diameter hose pipe to act as inlet and outlet for the cold plate. The entire assembly of the cold plate was fastened to the PHP by screws. The model of the PHP used is shown in Fig. 1. Water was circulated in the cold plate to absorb the heat dissipated at the condenser of PHP. The warmer water exiting the cold plate was cooled by passing the coolant through a liquid to air heat exchanger as shown in Fig. 3. The cooled liquid collected in a reservoir was recirculated by a pump that pushes the coolant back into the cold plate.

Schematic of the test setup
2.4 Test setup
The top side of the PHP substrate or the side on which the channels are cut was covered with 0.2 mm thick silicon sheet [8, 9] before closed using a transparent polycarbonate (for visualization) sheet of 10 mm thickness. The thin silicone sheet was introduced to prevent inter-channel communication during operation of PHP while providing adequate transparency for viewing the operation. An O-ring (2 mm diameter thick) was put in the groove (1.6 mm deep × 2 mm wide) machined out in the polycarbonate sheet to ensure leak-free (vacuum tight to begin with) operation of the PHP. The entire assembly concept is illustrated in Fig. 4.

PHP assembly, charging procedure and inclination measurement provision
As a precaution, before the assembly was tightened with the polycarbonate cover plate, a silicone based vacuum grease of Dow Corning make was applied over the O-ring to account for any undulations in machining which can cause leak or loss of vacuum [9]. The entire assembly of the PHP was mounted to a support plate which was clamped to 180° swiveling vice to facilitate performance evaluation with varying inclinations. The inclinations were measured using the inclinometer mounted on the support plate (bottom inset in Fig. 4).
2.5 Temperature measurement
The temperatures were monitored along the PHP length by 6 numbers of J-type thermocouples of Agilent make (U1185A) as shown in Fig. 3. The responses of the 6 thermocouples were recorded with Omega make data acquisition system (TC-8) which was interfaced with a computer for logging data for every 1 s.
2.6 Pressure monitoring
A Honeywell make pressure transducer – PX2AG2XX002BAAAX with range of absolute pressure 0–2 bar was integrated into the PHP to ascertain the vacuum integrity of the PHP before charging as well as during the operation as in [9]. The entire setup was depressurised (vacuum) and left for 24 h to estimate the leak rate. The leak rate was estimated to be of the order of 10−5 Torr-l/s. This was of the same order as indicated by the Adixen (Pfeiffer vacuum) model ASM 182TD+ helium leak detector. The pressure data was recorded at sampling rate of 20 Hz.
2.7 PHP fluid charging procedure
At the condenser, the PHP was provided with a charging block of polycarbonate, in which a hole was drilled to communicate with the channels. The charging block was connected to one of the ports of a Tarsons (890020) make 3-way stopcock. The second port of the stopcock was connected to a rotary-roots combination vacuum pump capable of 10−3 Torr (0.1 Pa). The third port of the stopcock was fitted with 5 ml syringe by which measured quantity of working fluid was admitted into the PHP. The setting up of PHP was as follows,
-
1.
The stopcock handle was kept at 45° so that no port communicates with the other port. To begin with the stopcock handle was rotated to make the ports connecting the PHP and the vacuum pump communicate with the syringe being isolated. At this position the vacuum was created.
-
2.
The stopcock handle was moved back to all ports sealed 45° position. The piston of the syringe was removed. The syringe was filled with the working fluid with 1 ml excess than required charge (for example the syringe was filled with 5 ml when the charge required was 4 ml). This excess was used to prevent entry of air into PHP during charging.
-
3.
Now the handle position was gently rotated to make the ports connecting the syringe and the PHP to communicate. Due to the atmospheric pressure being greater than the PHP channel pressure (vacuum of 0.1 Pa) the fluid entered the channel. Here care was taken not to admit excess charge. The last 1 ml of the charge was left in the syringe to act as a seal from the atmospheric condition. Now the syringe piston was put in place gently.
After the charging the working fluid self-distributed inside the channels as slug-plug combination as in shown Fig. 5. This is due to the dominance of surface tension forces over the gravitational force (for Bo <2) thus the liquid slugs are able to completely bridge the tube. This results in a meniscus region on either end of each liquid slug caused by surface tension at the solid/liquid/vapour interface.

Slug and plug formation of liquid and vapour after charging
2.8 Testing of PHP
The PHP after charging was clamped into the swiveling vice along with inclinometer. The 6 thermocouples were planted in the respective recesses made in the hardware. The condenser cooling hoses were connected to the cold plate. The condenser cooling was switched on before heat load was applied to prevent excessive temperature rise. Once the cooling was applied to the condenser zone the computer and the interfaced data acquisition system were turned on. Then the power supply to heater was turned on and the current was adjusted to achieve the desired heat dissipation. The temperature data was recorded continuously (sampling rate 1 Hz). For the inclination of 90° the experiment was conducted for a minimum of 15 min to ensure steady state conditions. For the rest of the inclinations, the experiment was conducted for 10 min in each case as the entire assembly was already heated up and only an incremental change in temperature was expected.
2.9 Uncertainty in measurements
The temperature is the primary measured quantity in the study. The accuracy of the readings of temperatures (thermocouples) was ±1.0 °C. The current and voltage supplied by the power supply has a maximum (full scale) error of ±0.1% (25 mA) and ± 0.1% (60 mV) respectively. Hence the overall thermal resistance estimated can have a maximum uncertainty by [10],
Thus the derived quantity of the thermal resistance, the difference in temperatures divided by the heat load would have an uncertainty of ±0.02 °C/W as summarized in Table 1. However, the maximum uncertainty in this study was expected to arise from the fill ratio as the filling was done using the syringe by visual estimate.
3 Results and discussion
3.1 Benchmarking of the test setup
To begin with, the test setup was calibrated against the existing data in the literature [6]. The hardware was made almost identical to the setup-1 of [6]. The initial testing was done for 70% fill ratio of water for 50 W as in [6]. The results of the experiment with water as working fluid are summarized in Fig. 6. The 90° inclination was taken as the vertical operation of the PHP with evaporator below condenser. In the entire study, the evaporator was always below the condenser with 7.5° being the least angle inclination (which was close to being horizontal operation).

Temperature distribution along PHP for various inclinations for water with 70% fill ratio at 50 W
This PHP was then tested for the same 70% fill ratio with methanol as methanol was found to have most of the desired properties of a PHP working fluid. The PHP with water recorded a maximum temperature (as expected at evaporator) of 83 °C for 90° inclination whereas the methanol yielded a temperature of 82 °C. However, the condenser temperature was almost constant for a given experiment (fluid) for all inclinations with variation of less than ±1.5 °C which can be attributed to the change in the ambient temperature during the experiment. For the PHP at 7.5° inclination the evaporator temperatures reached 118 and 99 °C for water and methanol respectively.
The results show that the evaporator temperature variation up to 45° inclination was not substantial. The degradation from there on with each lower inclination was more significant. Also from Fig. 7 it was evident that the temperature variation along the length of the PHP for 90° inclination for water matches fairly with the published data of [6] of same experimental conditions. The results indicate that at 90° inclination the difference in performance between methanol and water was not substantial. In the vertical operation, as the gravity assists the transport of liquid from condenser to evaporator, water matches the performance of methanol though methanol has higher (dP/dT)sat. However, when the inclination is far from vertical (like 45° and below) methanol having higher (dP/dT)sat, [6, 7] lower latent heat, lower density and lower viscosity was found to be a better PHP working fluid. In the horizontal orientation, the gravity does not aid the return of condensate to the evaporator for any fluid. But the lower viscosity of methanol makes the pulsations better than water, thus resulting in the enhanced thermal performance in the near horizontal condition. This relatively reduced performance of water in near horizontal conditions has also been reported in [11] when fluids - ethanol and R123 were tested apart from water for various orientations.

Temperature along PHP for 90° inclination and 70% fill ratio at 50 W
In this study, the PHP inclination was changed from 90° in steps of 15° up to 30° for both water and methanol. Then the inclinations were changed and tested for every 2.5° up to 7.5°. The PHP continued the operation until the angle of inclination of 7.5° was reached with very low pulsations. Below this inclination the PHP failed to pulsate. Thus the critical tilt angle for this configuration of PHP was resolved to be around 10−7.5°.
The visualization captured by video camera indicates that the oscillations are substantial until the 45° inclination and there on the oscillations become less severe with very low amplitudes between 15 and 7.5°. This phenomenon is very much evident from Fig. 6 as the evaporator temperatures were substantially less for predominantly vertical orientations.
3.2 Effect of fill ratio with varying inclination for a given heat load
After the calibration of the entire hardware, the experimental investigation was carried out to ascertain the effect of fill ratio of methanol on the performance of the PHP for a given heat load (50 W). The PHP was tested with various fill ratios – 30 to 70% in steps of 10%, with inclinations changed starting from vertical orientation in the sequence of 90°−60°−45°−30°−10°−7.5°. For each inclination minimum of 10 min was allowed so as to achieve the quasi-steady state condition before moving over to the new inclination. From Fig. 8 it can be inferred that the Rth values of 40% fill ratio was the most favourable across inclinations with least values for all the inclinations. Also at 40% fill ratio the difference in Rth values across inclinations (most favourable vertical to least favourable near horizontal) was the least. The Rth values of the 30% was found to be more favourable at lower inclinations than 50 and 60% fill ratio though these higher fill ratios yielded lower Rth values at near vertical orientations. The 60% fill ratio was even lesser in terms of heat transfer performance compared to the lower fill ratios. The 70% fill ratio was the least effective in performance as indicated by the curves in Fig. 8. This has also been reported in [8] as beyond 70% fill ratio the degree of freedom for oscillations decrease thereby resulting in diminished thermal performance. This figure also reinforces the fact that the performance of water as working fluid is lower at near horizontal orientations as compared to methanol of same fill ratio. Also visualization studies indicated that the corners of the channel were aiding the return of condensate from condenser to evaporator at lower inclinations (when gravity was not effective) as reported in [8].

Thermal resistance vs inclination for various fill ratios
3.3 Effect of heat load and inclination for a given fill ratio
The best performing fill ratio of 40% was chosen for further scrutiny with respect to varying heat loads as well as inclination. The above mentioned fill ratio was tested for only two inclinations – the best performing 90° and the near horizontal 10° with heat loads varying between 10 and 100 W (in case of 10° inclination only up to 90 W) in steps of 10 W. The heat loads were restricted to 100 W as a precaution as the temperature at the evaporator was exceeding 90 °C. As the inclination of 7.5° was ascertained as the critical tilt angle the tests were carried out at 10° to ensure tests at substantial number of heat loads before reaching dry-out or prohibitively high evaporator temperatures. The Fig. 9 shows that the Rth decreases with increase in heat load as this leads to more vigorous pulsations which aids in heat transfer. This trend of lower Rth with higher heat loads is very similar to the one reported in literature [12]. Also from Fig. 9 it can inferred that the Rth was lower for the vertical operation than for the 10° inclination indicating the influence of orientation (gravity) on the performance of PHP.

Thermal resistance vs heat load for 30 and 40% fill ratios at 90 and 10° inclinations
For 10 to 30 W heat loads (40% fill ratio) at 90 and 10° inclinations, the pulsations were moderate and all channels did not pulsate simultaneously. The flow regime in this case was of slug flow. The pulsations were of lower velocity up to 30 W. The slugs could not reach the top of the channel or in other words could not travel the full length of the PHP. When the heat load was increased to 40 W the pulsations became more prominent. The slugs could reach the entire length of the PHP channel. For higher heat loads the pulsations were vigorous and the slugs could travel the entire length and turn around at the condenser end. This manifested as reduction in thermal resistance with the increase in the heat load. For the 10°inclination, at 10 W heat load the pulsations were very feeble and the slugs mostly travelled only up to half the length of the PHP channel. From 30 W heat input the slugs could complete the full length of the PHP and return to the adjacent channel at the condenser end.
In Fig. 10, Te and Tc along with the corresponding pressure (saturation) from transducer has been plotted with respect to time. Initially the PHP has the pressure equal to atmospheric pressure. The pressure transducer output was sampled at 20 Hz as the pulsations were reported to be around 3 Hz [13]. When the vacuum pump is turned on the lower pressure of the order of 0.1 Pa was reached. The pump is switched off and the fluid is admitted inside the PHP leading to rise in pressure equal to the saturation pressure of the fluid corresponding to the temperature of the PHP (in this case the PHP was at more than 30 °C) at the time of charging. The figure also shows that the oscillations were very moderate until 30 W. After the initiation of 40 W, the pulsations were vigorous and the same has manifested as a dip in Te (thus reduced Rth) after few minutes of 40 W heat load. Beyond this point the pulsations were of large amplitude with higher velocity. The vigorous pulsations are indicated by the large fluctuations of the pressure and temperature signals. The flow regime was of annular flow at higher heat loads (above 60 W).

Temperature and pressure data for 40% fill ratio of methanol at 90° inclination for varying heat load
3.4 Repeatability of the experiments and the critical tilt angle
The tests were repeated for the 40% fill ratio to ensure repeatability of the experiment as shown in Fig. 11. The two experimental runs were carried out at 50 W heat load for various inclinations starting from 90°. The evaporator temperatures were nearly the same for all the inclinations indicating the repeatability of the experiment. The PHP Te showed larger amplitude pulsations as the inclination angle was reduced to 10−7.5°. Once the inclination was changed to 5° the values of Te started raising rapidly leading to aborting of the experiment (turn off the heat load) within 6 min in Experiment-1 and within 3 min in Experiment-2 after moving to 5° inclination. This also reinforces the fact that the critical tilt angle for the configuration of PHP under test can be between 10 and 7.5°.

Te (40% fill ratio-methanol) with inclinations varying from 90 to 0° (2 experimental runs for repeatability)
3.5 Thermal resistance of PHP and the effect of PHP in comparison with dry PHP
The overall thermal resistance [6] of the PHP was defined as \( {R}_{th}=\left({T}_e-{T}_c\right)/\overset{.}{Q} \). At 90° inclination, the overall resistance with water as working fluid was 1.0 °C/W. This value has a very good match with the same configuration of experiment no. 1 of the literature [6].
In the PHP under study the overall thermal resistance was a combination of 3 parallel paths of heat transfer [14] – PHP effect, conduction through aluminium alloy substrate and conduction through polycarbonate cover plate as shown in Fig. 12. The thermal resistance of the empty (unfilled) PHP of the same geometry will be given by Eq. (7). With RAl being 5.2 °C/W (kAl = 180 W/m-°C) and RPC (kPC = 0.26 W/m-°C) being 708 °C/W the Rempty ≈ 5.2 °C/W. The estimation of the thermal resistance of the empty PHP was also carried out experimentally with 10 W heat load (so as to keep the temperature to minimum at steady state). The temperature trace of Te and Tc as well as that of the Rempty is shown in Fig. 13. The experimental estimation of the Rempty showed the thermal resistance to be more than 3.8 °C/W. Thus the RPHP can be estimated as 1.36 °C/W from the experimental value. When compared to the thermal resistance value of 1 °C/W for 90° inclination and 70% fill ratio at 50 W for water from the experiment the thermal resistance can be reduced by almost 1/4th of that of an empty substrate. This enhancement of thermal performance will be even more substantial if the substrate material is less conducting (non-metals) than that of aluminium used in this study.

Thermal resistance network of PHP

Estimation of thermal resistance of empty PHP by experiment
3.6 Effect of contact angle hysteresis
From Fig. 14 the contact angle hysteresis is given by Δθ = θfront - θrear for liquid slug. As specified in [6], the lesser the contact angle hysteresis for a given solid-fluid combination, lesser is the resistance for the movement of the fluid. As θfront > θrear, the capillary forces at the front and the rear of a slug will be Fcap-front < Fcap-rear thus offering resistance to the flow direction. Thus more heat transfer occurs for minimum Δθ as the pulsations will be less hindered. In this aspect methanol appears to be a fluid of choice than water.

Forces across a slug with respect to moving direction
3.7 Effect of flow resistance - pressure drop due to bend radius
Figure 15 indicates the bend radius used in the present design of PHP is much smaller compared to the recommended minimum bend radius in piping. This smaller radius will result in more pressure drop (greater resistance) than the minimum bend radius shown adjacent. From practical stand point to pack more channels (thus more fluid inventory) sharp radii are more favourable. But a smoother bend will certainly lower the flow resistance as pressure loss in single phase flow in a smooth conduit bend is approximately the sum of pipe friction and a term accounting for the ratio of R/D where R is the radius of the bend and D is the diameter of the pipe [15]. Hence larger bend radius is beneficial from the pressure loss point of view, as this lower pressure loss will enhance the heat transfer by way of more vigorous pulsations. This aspect of flow resistance leading to reduced heat transfer performance of PHP have been reported in [8, 12] where the authors have stated that in PHPs of comparable overall size, the ones with larger channels performed thermally better than the ones with narrower channels. The authors in [8, 12] have attributed the diminished performance of narrower channels to the flow resistance of the narrower channel thus reinforcing the fact that lesser flow resistance leads to better thermal performance of PHP.

Bend radius vs flow resistance
4 Conclusions
A flat plate closed loop PHP was experimentally investigated for its performance with respect various orientations with 2 different working fluids – water and methanol. The first experiment (with water) was used to bench mark the testing procedure and the test setup with the published data of [6] with their setup no. 1 - experiment no. 1. Hence the hardware or the PHP construction was made almost the same as the published data (comparison shown in Table 2). A pressure transducer was attached to the PHP to continuously monitor the integrity of the PHP for leakages. The plot shown in Fig. 7 indicates that the results have a very good correlation with the published data. An attempt was made to resolve the critical angle below 15° (up to which was attempted in [6]) beyond which the PHP stops working. The fill ratios were varied for a given heat load of 50 W for methanol and the inclinations were also varied. The best fill ratio was tested for varying heat loads for the best performing vertical and the 10° near horizontal orientation.
The salient observations are as follows,
-
1.
For the inclinations nearly vertical the difference in performance between 2 fluids at 70% fill ratio was not substantial.
-
2.
The degradation in the PHP performance occurred after 45° inclination for both fluids up to which the performance was nearly the same.
-
3.
The thermal resistance of methanol for predominantly horizontal operation was less than that of water due to lesser density, lesser viscosity and higher (dP/dT)sat of methanol when compared to water.
-
4.
The 40% fill ratio was found yield the best performance for methanol as working fluid with least Rth.
-
5.
Even at 40% the gravity had influence on the performance as indicated by higher Rth for 10° inclination for all heat loads when compared with 90° inclination.
-
6.
The critical tilt angle was ascertained as 10−7.5° and the PHP restored its normal operation once the angle of tilt is reinstated to greater than the critical tilt angle.
-
7.
The thermal resistance of the substrate geometry (empty or dry PHP) could be enhanced by nearly 8 times (Rth = 0.5 °C/W in case of 40% fill ratio of methanol at 90° inclination at 100 W with respect to dry PHP) due to the PHP operation.
-
8.
At lower heat loads the pulsations were less prominent and with increase in heat loads the pulsations were more vigorous leading to reduction of Rth with increase of heat loads.
-
9.
Also methanol appears to be a fluid of choice than water due to the lesser contact angle hysteresis for a given solid-fluid combination.
-
10.
A smoother bend will certainly lessen the resistance for fluid flow, thus will enhance the heat transfer by way of more pulsations.
-
11.
The experiments with silicon substrate and fluoro-carbon fluids can be attempted as this would facilitate dielectric integration of the PHP to the electronics to be cooled.
Abbreviations
- Acs :
-
Heat transfer cross-sectional area in solid m2
- Ac :
-
Cross-sectional area of channel mm2
- Bo:
-
Bond number
- D:
-
Diameter of the channel mm
- Dh :
-
Hydraulic diameter of channel mm
- (dP/dT)sat :
-
Change in pressure for a given change in temperature at saturated condition Pa/K
- g:
-
Acceleration due to gravity m/s2
- I:
-
Current supplied to heater A
- k:
-
Thermal conductivity of solid W/m-°C
- L:
-
Distance between evaporator and condenser mm
- P:
-
Pressure of fluid Pa
- Pw :
-
Perimeter of channel mm
- \( \overset{.}{Q} \) :
-
Heat supplied to heater W
- R:
-
Centreline radius of the bend of the channel mm
- RAl/PC :
-
Thermal resistance due to conduction in solid °C/W
- Rempty :
-
Thermal resistance of PHP without fluid °C/W
- Rth :
-
Thermal resistance of PHP °C/W
- RPHP :
-
Thermal resistance due to PHP effect °C/W
- ∆T:
-
Temperature drop: evaporator – condenser °C
- T:
-
Temperature of fluid °C
- Tc :
-
Temperature at condenser °C
- Te :
-
Temperature at evaporator °C
- V:
-
Voltage supplied to heater V
- ρl :
-
Density of liquid kg/m3
- ρv :
-
Density of vapour kg/m3
- σ:
-
Surface tension of liquid N/m
- β:
-
Inclination angle degrees
- θ:
-
Contact angle (solid-fluid) degrees
References
Zhang Y, Faghri A (2008) Advances and unsolved issues in pulsating heat pipes. Heat Transfer Eng 29(1):20–44. https://doi.org/10.1080/01457630701677114
Reay DA et al (2014) Heat pipes – theory, design and applications. Elsevier, Oxford, pp 142–149. Chap.-7
Rittidech S et al (2003) Correlation to predict heat transfer characteristics of a closed-end oscillating heat pipe at Normal operating condition. Appl Therm Eng 23:497–510. https://doi.org/10.1016/S1359-4311(02)00215-6
Groll M, Khandekar S (2003) Pulsating heat pipes: progress and prospects. In: Proc of international conference on energy and environment, vol 1, pp 723–730
Khandekar S, Groll M (2003) On the definition of pulsating heat pipes: an overview. In: Proc. of 5th Minsk International Seminar (Heat Pipes, Heat Pumps and Refrigerators), Minsk, Belarus
Khandekar S et al (2003) Thermofluid dynamic study of flat plate closed loop pulsating heat pipes. Microscale Therm Eng 6(4):303–317. https://doi.org/10.1080/10893950290098340
Han H et al (2014) A comparative study of the behaviour of working fluids and their properties on the performance of pulsating heat pipes. Int J Therm Sci 82:138–147. https://doi.org/10.1016/j.ijthermalsci.2014.04.003
Yang H et al (2009) Performance characteristics of pulsating heat pipes as integral thermal spreaders. Int J Therm Sci 48(4):815–824. https://doi.org/10.1016/j.ijthermalsci.2008.05.017
Kearney D, Griffin J (2014) An open loop pulsating heat pipe for integrated electronic cooling applications. ASME J Heat Transfer 136(8):081401. https://doi.org/10.1115/1.4027131
Kilne SJ, Mc Clintock FA (1953) Describing uncertainties in single-sample experiments. Mechanical Engineering 75:3–8
Charoensawan P et al (2003) Closed loop pulsating heat pipes part a: parametric experimental investigations. Appl Therm Eng 23:2009–2020
Chien K et al (2012) A novel design of pulsating heat pipe with fewer turns applicable to all orientations. Int J Heat Mass Transf 55:5722–5728. https://doi.org/10.1016/j.ijheatmasstransfer.2012.05.068
Mameli M et al (2014) Local heat transfer measurement and thermo-fluid characterization of a pulsating heat pipe. Int J Therm Sci 75:140–152. https://doi.org/10.1016/j.ijthermalsci.2013.07.025
Cengel YA (2003) Heat transfer - a practical approach. Tata McGraw-Hill, New Delhi
Pigott RJS (1950) Pressure losses in tubing, pipe and fittings. Trans ASME 72:679–688
Acknowledgements
The authors (P Srikrishna and N Siddharth) thank the Director, MTRDC, for providing the opportunity and encouragement in carrying out the tasks presented in the paper.
Author information
Authors and Affiliations
Corresponding author
Additional information
Publisher’s note
Springer Nature remains neutral with regard to jurisdictional claims in published maps and institutional affiliations.
Rights and permissions
About this article

Cite this article
Srikrishna, P., Siddharth, N., Reddy, S.U.M. et al. Experimental investigation of flat plate closed loop pulsating heat pipe. Heat Mass Transfer 55, 2637–2649 (2019). https://doi.org/10.1007/s00231-019-02607-z
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00231-019-02607-z