
Abstract
The two-phase flow-assisted high heat flux management of electronic devices is an inexpensive and unswerving technique. The passive cooling, heat-spreading, or dissipating devices are getting attention because of their compactness (necessitating fewer components). Being very simple in construction, it has more complex governing physics. The performance affecting parameters need proper optimization to mimic the oscillatory or circulatory motion of the working fluid for maximum heat transfer. In this study, the effect of filling ratio with a model of the closed-loop pulsating heat pipe of two meandering turns constructed with (ID/OD 2/4 mm) copper and glass tube. The degassed water as working fluid up to 70% filling ratio, heat input range 5–20 W set as operating conditions. The significant outcome of the experiments mined from temperature and pressure variation shows the effects of fluid filling ratio, heat input, and vacuum on the thermal performance in the vertical orientation. A threshold value of heat input, range of fluid filling ratio exists to perform the behavior of pulsating heat pipe under a predetermined orientation.
Access provided by Autonomous University of Puebla. Download conference paper PDF
Similar content being viewed by others

Keywords
1 Introduction
The emerging techniques of micro-fabrication in electronic devices require a single or multi-phase flow to achieve heat dissipation or spreading [1]. This transport of heat energy leads to better control and efficiency. Among the multi-phase cooling systems, heat pipes are capable of handling the heat dissipated from the chips and other electronic components. The pulsating/oscillating (PHP/OHP) heat pipe has a thermally driven motion of working fluid to encourage the passive heat transfer for heat management. Oscillating slug-plug and annular flow dominate the flow pattern in a closed-loop wickless system. The liquid slugs entrapped between the vapor plugs travels in oscillatory fashion by the pumping action of bubbles generated in the evaporator. The temperature gradient between the evaporator and condenser creates temporal and spatial pressure disturbances due to simultaneous evaporation and condensation. The sustained flow of working fluid amounts for sensible along with latent heat transfer in the PHPs.
Smaller and faster is the better trend of electronics by 2020 will lead the development in the heat flux density 190 W/cm2. In the purview of cooling techniques, Mudawar [1] investigated and developed the capabilities of dissipating the high heat fluxes in electronics. He focuses on natural, forced convection, phase change cooling techniques, and recommends that the CHF plays a vital role in the design of phase change cooling. The modernization and improvement of electronic devices day by day lead to explore the enhanced techniques of heat dissipation, which are reliable, cost-effective, high heat dissipation potential, and compact. The CHF is a defining parameter that can be used to predict the performance of any heat dissipating device. The cooling method is selected based on the estimation of parameters, such as heat, space, passive or active cooling, etc. Khandekar et al. [2] investigated a single loop pulsating heat pipe of a total length of 190 mm made of glass and copper with ethanol as a working fluid. They realized that the performance would depend on the flow pattern of the working fluid inside the tube. A heat pipe stops working when a complete stopover in the motion happens. The phase change of working fluid and energy exchange follows the p–h diagram, which has been explained about the working of the pulsating heat pipe. A continuous rise in the evaporator temperature can be seen if the net motion does not happen. A review on reliability by Song and Wang [3] for the power electronic systems, focused on reliability assessment, reliability improvement of an existing system, and reliability-oriented design solution. They discussed metrics for the evaluation of power electronic systems comprised of reliability, failure rate, mean time to failure, mean time to repair, and availability. The methods to improve all the metrics are thermal management, fault diagnosis, and improvement in design. Rao et al. [4] conducted a unit cell experiment using a glass tube with working fluid FC-72 and a single bubble to understand the hydrodynamics of the working fluid. The tube sized bubble oscillated between the condenser and evaporator section. The role of evaporation and condensation heat transfer from the thin film discussed, and vapor temperature varies much because of it. The liquid slug performs sluggishly to the temperature variations than the vapor plug.
The vast testing of multi-loop closed pulsating heat pipe of copper tube Mameli et al. [5] found the effects of input heat flux, filling ratio, inclination angle using the working fluid FC-72. The internal diameter of the tube kept lesser, which offers a high surface tension force. The horizontal setup fails to start, but the vertical one stops only at the critical heat flux. In a study of single turn pulsating heat pipe conducted by Saha et al. [6] it was found that the diameter of 4 mm fails to give a stable motion to the working fluid. So lesser diameter recommended by Bond number relation is suitable to perform the pulsating heat pipe experiments. The continuous rise in temperature does not happen like other heat pipes in PHPs Cui et al. [7, 8]. The stagnant heat transfer occurs before the start of the oscillation motion on a small scale. The five loop setup made from 2 mm internal diameter copper tubes contains water, methanol, ethanol, and acetone 20–80 filling ratio as a working fluid. They noticed that a critical start-up heat flux and optimum filling ratio exist for the maximum thermal performance.
In one study, they conducted experiments with the binary mixture to find that the low filling ratio is performing well, and the only benefit is that this delay the dry-out phenomena.
The applications of the heat pipe are extensive in electronic devices, mechanical system, space, etc. The power electronics is one which utilizes this idea much than the others. Kearney et al. [9] conducted a study of the open-loop pulsating heat pipe of 44 channel for two independent dielectric working fluids NovecTM 649 and NovecTM 774; the earlier was performing better. The working fluid with lower pressure operation and low global warming potential are desired for heat pipe applications. They used the pulsating heat pipe as a heat spreading device and identified a range of optimum operating conditions. The heat transfer performance of two single loop heat pipes connected parallel was found lesser than the single two-loop heat pipe by Kim et al. [10]. They used ethanol and water for a fixed filling ratio and different heat inputs. In this setup, a copper tube of 2.2 mm with working fluid ethanol performs better because of high-pressure change for a small temperature variation.
The non-condensable gasses offer some resistance in heat transfer, so the rate of evaporation and condensation are affected. The evacuation pressure role was verified by Sun et al. [11] using working fluid water and HFE-7000 in a copper tube heat pipe of 8 parallel channel of 2.4 and 1.6 mm diameter. The solubility of non-condensable gasses in water depreciates the start-up performance than the HFE-7000. The working fluid characteristics affect the performance of the heat pipe [12]. The properties such as surface tension, pressure change for a given temperature change, latent heat, and presence of non-condensable gasses are some essential points to be considered. The water is readily available having high latent heat is useful, but at the same time, high surface tension makes it vulnerable to start a heat pipe functioning.
The present study deals with a two-loop pulsating heat pipe of 2 mm internal diameter. There are very few experiments carried out at low filling ratio, low heat input at the evaporator in a two-loop pulsating heat pipe. The distilled water as a working fluid and air cooling at the condenser are rare to find in literature. The single loop pulsating heat pipe does not perform while multi-turn does quite well because of uniform pressure distribution. Therefore, a two-loop system would be a great choice between the single and multi-turn to make a compact and reliable heat pipe for low heat dissipating devices.
2 Test Setup and Measurement
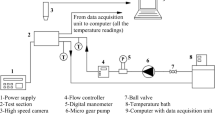
The test setup of the pulsating heat pipe, as shown in Fig. 1 includes instrumentation and a model of the pulsating heat pipe installed on a rotatable mount. The PHP has 1 mm wall thickness, 2 mm internal diameter copper tube evaporator, and condenser sections height of 25 and 35 mm, respectively. The quartz glass tube of 202 mm made an adiabatic section. The setup is filled with filling ratios of 5, 30, 40, and 70% with pure degassed water after evacuation to 650 mmHg by a vacuum pump. The bend radius of the copper tube was 10 mm so that it should not collapse to make the U connector to complete the loop. Joule heating to heat the evaporator is achieved through a 32 SWG nichrome wire enfolded around the copper tube and insulation over it. A DC source of accuracy ± 0.5% + 2, KEYSIGHT make model N5751A supplies electrical power to the heater. National Instrument (NI) make NI cDAQ-9189 acquires the signal from temperature and pressure sensors by modules NI9213 and NI9205, respectively. The temperature and pressure transducer read by control software LabVIEW on a computer. Honeywell makes TJE Precision Absolute Pressure Transducer of accuracy 0.1% with internal amplification measures the absolute pressure in this setup while working and degassing.

Test facility of pulsating heat pipe
The Tarson make rocker 300 model 110 mmHg absolute vacuum pump evacuates the pre-filled setup. The temperature of the pulsating heat pipe evaporator, condenser, adiabatic section and cooling air to judge the thermal performance are recorded with calibrated TEMPSENS make T-type thermocouples of 0.5 mm diameter. The proper thermocouple contact with the surface of the heat pipe to avoid the contact thermal resistance is made with a thermal paste. The Swagelok make needle valves, adapters, tubes assembled to make the filling and vacuum port. The condenser section kept in a duct that has a facility that air is axially forced via HICOOL make compact fan model 12A230HSAC axial fan of 120 × 120 mm2 with an airflow of 95 cfm. The degassed Millipore water from a custom degassing facility is filled with a syringe pump post evacuation of PHP. The presence of air in the system acts as non-condensable gas that interrupts the evaporation and condensation process of working fluid.
3 Performance Calculation
The overall thermal resistance and thermal conductivity estimate the performance [7], [8], and [11] performance of pulsating heat pipe. The heat supplied to the evaporator section is found by Joule heating of the nichrome resistance heater. The heat loss to the ambient doesn’t affect the order of thermal resistance and due to heavy glass wool insulation, we have ignored it.
The Fourier’s Law of heat conduction provides effective thermal conductivity, using average evaporator \(T_{e}\) and condenser \(T_{c}\) temperature.
Here the effective length of the pulsating heat pipe \(L_{\text{eff}}\) is the distance between the evaporator and condenser section.
where \(A\) is the cross-section area of the pulsating heat pipe. The lengths of the evaporator, condenser, and adiabatic section are \(L_{e}\), \(L_{c}\), and \(L_{a}\), respectively.
where \(n\) is the number, and d is the internal or hydraulic diameter of channels. The thermal resistance is obtained from electrical analogy,
4 Results and Discussion
The temporal temperature variations are the main parameters that we required to evaluate the performance of the pulsating heat pipe. The effective thermal conductivity and thermal resistance are evaluated. The effects of different parameters are summarized in the sections below.
4.1 Start-up of the Pulsating Heat Pipe
The working fluid inside the tubes distributes itself in the form of plug-slug due to its surface tension. At ambient condition, the vapor inside the tube is in a saturated state. The plug-slug is unevenly distributed in the parallel channels creating different frictional forces for the directional motion when the working fluid receives heat. The formation of tube size or small bubbles occurs with a rise in temperature. Simultaneous heat dissipation at the condenser section makes the low-pressure zone and vapor volume decrease. Being an isochoric device same vapor generated at the evaporator section makes condition favorable to move the working fluid. This random volume or pressure distribution is responsible for moving the working fluid inside the tube [2]. After the start-up, the temperature of the evaporator falls eventually and remains below the maximum value in oscillating mode while operating. The peak temperature and continuous rise due to heat input increment can be observed in Fig. 2 and Fig. 3. When working with low filling ratios, only chugging motion at the evaporator site happens; no resultant motion of slug-plug train happens, resulting in a continuous rise in temperature. As shown in Fig. 4, at the filling ratio, 70% oscillatory flow occurs once oscillation starts.

Temperature variation operating at very low filling ratio 5%

Temperature variation operating at medium filling ratio 30%

Average evaporator temperatures at heat input 10 W operating at different filling ratios
4.2 Effect of the Filling Ratio
The evacuated tubes of the pulsating heat pipe are filled with the distilled water with a syringe and a one-way valve to a determined filling ratio. The motion of the working fluid is the only reason behind the heat transfer performance of the heat pipe. Proper optimization of parameters needs to be done under which the desired temperature of the electronic equipment can be maintained.
The low filling ratios lead to dry-out phenomena at the evaporator while at high filling ratios performs well, as it has also been discussed by Cui et al. [8]. Due to sudden motion, a fall in the evaporator temperature happens, and it rises when the working fluid is not enough in the evaporator. The working fluid filling ratio 5, 30, and 40% remains deficient, and no oscillatory flow happens, failing the operation, as shown in Fig. 4 at a heat input of 10 W.
4.3 Effect of the Heat Input
A threshold value of input heat flux exists at which the working of pulsating heat pipe starts. The boiling of working fluid starts at saturated condition, which initiates small or tube-size bubble formation. The failure of an electronic device might happen if the heat transfer equipment does not remove the heat. So the threshold value of the heat input should be lower than the minimum designed heat dissipated. Kumar et al. [12] also conducted experiments to look after the effect of input heat at the thermal performance of the heat pipe. The effective performance of the pulsating heat pipe found to be increasing with the increase in input power because of the more intense motion of the working fluid inside the tube. The desired performance depends on the type of movement, and the circular motion of the working fluid is found best in the literature.

Temperature variations at the individual turn for heat input 10 W
5 Thermal Performance Comparison
The performance in terms of thermal resistance of the present work has been compared, as shown in Fig. 6. Cui et al. [8] conducted experiments with five turns pulsating heat pipe with distilled water with the filling ratios 45 and 70%. Therefore, the performance of the present study was not approaching that level but comparable to their results. The evacuation pressure also affects the rate of heat transfer and the maximum evaporator temperature. In the study conducted by Kumar et al. [12] with two turns pulsating heat pipe, the performance was lower than the present study working also with the distilled water. The repeatability test of the setup shows very similar performance, as shown in Fig. 4 for different evacuation pressures. The filling ratios 30 and 40% perform very identical and follow the same temperature profile.

Thermal performance comparison
6 Conclusion
The experiments conducted to study the pulsating heat pipe for the application like heat dissipation or to spread it over a large area. Low heat input levels evaluate a two-loop semi-transparent pulsating heat pipe performance under different filling ratios. The working fluid in the tube remains saturated. The translating-oscillating motion due to heat addition and rejection makes the pulsating heat pipe an excellent passive cooling device. At low filling ratios (5, 30, and 40%), the heat pipe does not function well, the temperature and pressure piles up in the evaporator, while at 70%, the temperature starts to fall after a threshold value. The heat input of 10 W is enough to start the motion in the vertical orientation. This heat transfer device offers lower thermal resistance has higher heat spreading or dissipating capacity; thus, the more uniform temperature in an electronic device can be maintained.
References
Mudawar I (2001) Assessment of high-heat-flux thermal management schemes. 24(2):122–141
Khandekar S, Groll M (2004) An insight into thermo-hydrodynamic coupling in closed loop pulsating heat pipes. Int J Therm Sci 43(1):13–20. https://doi.org/10.1016/S1290-0729(03)00100-5
Song Y, Wang B (2013) Survey on reliability of power electronic systems. IEEE Trans Power Electron 28(1):591–604. https://doi.org/10.1109/TPEL.2012.2192503
Rao M, Lefèvre F, Khandekar S, Bonjour J (2013) Understanding transport mechanism of a self-sustained thermally driven oscillating two-phase system in a capillary tube. Int J Heat Mass Transf 65:451–459. https://doi.org/10.1016/j.ijheatmasstransfer.2013.05.067
Mameli M, Manno V, Filippeschi S, Marengo M (2014) Thermal instability of a closed loop pulsating heat pipe: combined effect of orientation and filling ratio. Exp Therm Fluid Sci 59:222–229. https://doi.org/10.1016/j.expthermflusci.2014.04.009
Saha N, Das PK, Sharma PK (2014) Influence of process variables on the hydrodynamics and performance of a single loop pulsating heat pipe. Int J Heat Mass Transf 74:238–250. https://doi.org/10.1016/j.ijheatmasstransfer.2014.02.067
Cui X, Zhu Y, Li Z, Shun S (2014) Combination study of operation characteristics and heat transfer mechanism for pulsating heat pipe. Appl Therm Eng 65(1–2):394–402. https://doi.org/10.1016/j.applthermaleng.2014.01.030
Cui X, Qiu Z, Weng J, Li Z (2016) Heat transfer performance of closed loop pulsating heat pipes with methanol-based binary mixtures. Exp Therm Fluid Sci 76:253–263. https://doi.org/10.1016/j.expthermflusci.2016.04.005
Kearney DJ, Suleman O, Griffin J, Mavrakis G (2016) Thermal performance of a PCB embedded pulsating heat pipe for power electronics applications. Appl Therm Eng 98:798–809. https://doi.org/10.1016/j.applthermaleng.2015.11.123
Kim B, Li L, Kim J, Kim D (2017) A study on thermal performance of parallel connected pulsating heat pipe. Appl Therm Eng 126:1063–1068. https://doi.org/10.1016/j.applthermaleng.2017.05.191
Sun CH, Tseng CY, Yang KS, Wu SK, Wang CC (2017) Investigation of the evacuation pressure on the performance of pulsating heat pipe. Int Commun Heat Mass Transf 85(April):23–28. https://doi.org/10.1016/j.icheatmasstransfer.2017.04.005
Kumar M, Kant R, Das AK, Das PK (2018) Effect of surface tension variation of the working fluid on the performance of a closed loop pulsating heat pipe. Heat Transf Eng 40(7):1–15. https://doi.org/10.1080/01457632.2018.1436390
Acknowledgements
This work is supported by Visvesvaraya Ph.D. Scheme of MeitY (Ministry of Electronics and Information Technology), Government of India.
Author information
Authors and Affiliations
Corresponding author
Editor information
Editors and Affiliations
Rights and permissions
Copyright information
© 2021 The Author(s), under exclusive license to Springer Nature Singapore Pte Ltd.
About this paper

Cite this paper
Patel, E., Kumar, S. (2021). Effect of Filling Ratio on Performance of Two Loop Pulsating Heat Pipe. In: Palanisamy, M., Ramalingam, V., Sivalingam, M. (eds) Theoretical, Computational, and Experimental Solutions to Thermo-Fluid Systems. Lecture Notes in Mechanical Engineering. Springer, Singapore. https://doi.org/10.1007/978-981-33-4165-4_13
Download citation
DOI: https://doi.org/10.1007/978-981-33-4165-4_13
Published:
Publisher Name: Springer, Singapore
Print ISBN: 978-981-33-4164-7
Online ISBN: 978-981-33-4165-4
eBook Packages: EngineeringEngineering (R0)