
Abstract.
The present paper concerns the investigation of the stress, temperature and magnetic fields in an isotropic elastic cylinder in a primary magenetic field when the curved surface of the cylinder subject to certain boundary conditions.The system of fundamental equations is solved by means of a finite difference method and the numerical calculations are carried out for the temperature, the components of displacement and the components of stresses with time and through the thickness of the cylinder. The results indicate that the effects of inhomogeneity and magnetic field are very pronounced.
Similar content being viewed by others

Avoid common mistakes on your manuscript.
1 Introduction
The dynamical problem of magneto-thermoelasticity has received much attention in the literature during the past decade. In recent years the theory of magneto-thermo-elasticity which deals with the interactions among strain, temperature and electromagnetic fields has drawn the attention of many researchers because of its extensive uses in diverse field, such as geophysics for understanding the effect of the Earth's magnetic field on seismic waves, damping of acoustic waves in a magnetic field, emissions of electromagnetic radiations from nuclear devices, development of a highly sensitive superconducting magnetometer, electrical power engineering, optics etc. The thermal stress problem in a finite circular cylinder has attracted the attention of numerous investigators [1–3]. Stress functions method of plane stress thermoelastic problem in a multiply connected region of variable thickness, has been investigated by Sugano [4]. The rotation of non-homogeneous composite infinite cylinder was investigated by El-Nagaar, et al. [5]. Abd-Alla, et al. [6] have investigated the thermal stress in an infinite circular cylinder of orthotropic material. El-Naggar, et al. [7] studied the thermal stresses in a rotating non-homogeneous orthotropic hollow cylinder. Janele, et al. [8] studied the finite amplitude spherically symmetric wave propagation in a compressible hyperelastic solid. Knopoff [9] and Nowacki [10] adressed these types of problems at the begining. Kaliski [11] investigated the wave equations of thermo-electric-magneto-elasticity. Suhbi [12] studied magneto-thermo-viscoelastic interactions in a body having cylindrical geometry. Mukhopadhyay and Roychoudhurj [13] discussed magneto-thermo-elastic interactions in an infinite isotropic elastic cylinder subjected to a periodic loading.
In the present paper, we have investigated the generation of stress, temperature and magnetic field in an infinite isotropic elastic cylinder placed in a constant primary magnetic field. The governing equations for the non-homogeneous in an isotropic elastic solid are obtained in conservation form. These equations are solved using a numerical method which uses relation from the characteristics theory of finite difference scheme. This scheme is easier to implement than the method of characteristic discussed by Haddow and Mioduchowski [14, 15]. Numerical results are presented for the variation of temperature, displacement and stresses with the time t and through the thickness of the cylinder. The effects of inhomogeneity and the magnetic field are very pronounced.
2 Formulation of the problem
Let us consider an infinite isotropic elastic solid cylinder with internal radius a and external radius b. (r, θ, z) are taken as the cylindrical coordinates with z-axis as the axis of the cylinder. The cylinder is placed in a constant primary magnetic field H O , acting in the direction of the z-axis. Assuming the medium to be non-ferromagnetic and ferroelectric and ignoring the Thompson effect, the simplified Maxwell's equations of electro-dynamics for perfectly conducting elastic medium are:
where \({\vec H}\) is the magnetic field, \({\vec E}\) is the electric field, \({\vec j}\) is the current density, \({\vec u}\) is the mechanical displacement, and \({\vec h}\) is the perturbed magnetic,
The corresponding equations for the adjoining free space are
where superscript o refers to values for the free space. The stress equations of motion in the absence of body forces are:
where Maxwell's electro-magnetic stress tensor τ ij is given by
and the mechanical stress tensor σ ij is given by
Considering radial vibrations of the medium, the only non-zero displacement is u r = u(r, t′), so that
The field components in the medium and in the contacting free space are then obtained from equations (2.1), (2.2) and (2.4) as:
The stress equations of motion (2.3) then reduce to
where
where u is the component of displacement in the radial direction, e ij are the strain components, T′ is the absolute temperature, λ and μ′ are Lame's constants, γ = (3λ+ 2μ′)α t , α t is the coefficient of linear thermal expansian, μ is the magnetic permeability and t′ is the time. The heat conduction equation in the presence of heat sources can be written in the following form
where k 1 and k 2 are the thermal diffusivity and thermal conductivity respectively, Q is the intensity of applied heat source.
The elastic constants λ and μ′, magnetic permeability μ and density ρ are taken as a power functions of the radial coordinate.
We characterize the non-homogeneity of the material by
where L, v′, v and ρ o are constants (the values of λ, μ′, μ and ρ in homogeneous matter) and m is a rational number. Substituting from equations (2.11) into equations (2.9) we obtain the stress-displacement relations are
where γ′ = (3L + 2v′)
Using (2.12) we have from (2.8) the displacement formulation of the equation of motion;
It is convenient to introduce the following non-dimensionalization scheme
where T o is a reference temperature and v is the dimensionless velocity. In terms of these non-dimensional variables, equations (2.10) and (2.13) can be rewritten in more convenient form as.
where
The stress components induced by the temperature T are related to displacement component U by
Assume that the intensity of the applied heat source is taken to be in the following form
where β being a nonnegative constant, t is the time and ε a constant.
From preceding description, the initial condition may be expressed as
The boundary condition may be expressed as
3 Numerical Scheme
A finite difference scheme which is a modification of MacCormack's scheme is described by wachtman, et al. [16]. Where it is used to obtain solutions to problem of thermal stress emanating from cylindrical cavity in a bounded medium. This scheme is a forwared-backwared predictor corrector scheme. We take the finite difference grids with spatial intervals h in the direction R and k as the time step, and use the subscripts i and n to denote the ith discrete points in the R direction and the nth discrete time. A mesh is defined by
where \(a_o = {a \over b}\) .
The functions T(R,t), U(R,t) and Q(R,t) may be at any nodal location
Thus the heat conduction equation (2.15) may be expressed in the finite difference as follows:
Also, the equation of motion (2.16) may be expressed in the finite difference as follows
where
4 Numerical results and discussion
For computational work, we take cooper as the example, for which the material constants at T o = 27°C are as follows:
Results are presented for cylinder with
To study the non-homogeneous case, we assume that m = 0.5 and for the homogeneous case we assume that m=0.0. We represented the numerical results graphically.
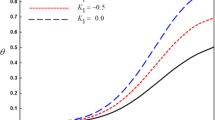
Figure 1 shows the temperature variation for various non-dimensional time t. It is noticed that the temperature increases with the increasing of R in all the contexts of all three modes and satisfied the boundary conditions.

Temperature distribution at different times
Figures 2 and 3 show the radial displacement along the radial direction R at various dimensionless t. From these figures the radial displacement U decreases and it starts to increase at the value R=0.4 for the non-homogeneous case and homogeneous case. It is noticed that the displacement component decreases with the increase of t under the effect of the magnetic field.

Radial displacement distribution (m=0.5, ν=0.5)

Radial displacement distribution (m=0, ν=0.5)
Figures 4, 5, 6 and 7 show the radial stress δ RR and tangential stress δθθ along the radial direction R at various times t. Also, they show the influence of the non-homogeneity of the material constants and the magnetic field on the stresses δ RR and δθθ. It will be observed from those graphs that the radial stress δ RR and tangential stresses δθθ decrease with the increase of R for the non homogeneous case and homogeneous case. It is noticed that they decrease with the increase of t.

Radial stress distribution (m=0, ν=0.5)

Radial stress distribution (m=0, ν=0.5)

Tangential stress distribution (m=0.5, ν=0.5)

Tangential stress distribution (m=0, ν=0.5)
The variation of stresses and displacement δ RR , δθθ and U are due to the effect of inertia and magnetic field. Also, the influence of the non-homogeneity on displacement and stresses is very pronounced.
5 Conclusions
Some interesting conclusions can be drawn from the analysis presented here. The material is elastic and has an inhomogeneity in the direction perpendicular to the boundary for the cylinder. A finite difference predictor-corrector scheme using a relation from characteristic theory at the inner and outer radii is used to obtain solutions for the non-homogeneous infinite cylinder. Compared with the homogeneous case the inhomogeneities in which Lame's constants increase and decrease with the distance measured from the boundary have respectively amplifying and attenuating effects on both the stress and displacement. The results are specific for the example considered, but other examples may have different trends because of the dependence of the results on the mechanical and thermal constants of the material.
References
Takeuti Y; Ishida R; Tanigawa Y (1983) On axisymmetric coupled thermal stress problem in a finite circular cylinder. ASME J Appl Mech, Vol. 50, pp. 116–122
Chau KT (1998) Toroidal vibration of anisotropic sphere with spherical isotropy. ASME J Appl Mech, Vol. 65, pp. 328–333
Suhir E (1989) Axisymmetric elastic deformation of a finite circular cylinder with application to low temperature strains and stresses in solids joints. ASME J Appl Mechanics, Vol. 56, pp. 513–520
Sugano Y (1984) On a stress function method of plane-stress thermoelastic problem in a multiply connected region of variable thickness. Acta Mechanica, Vol. 51, pp. 727–732
El-Naggar AM; Abd-alla AM; Ahmed SM (1995) On the rotation of a non-homogeneous composite infinite cylinder of orthotropic cylinder. J Appl Math Comput Vol. 69, pp. 147–157
Abd-alla AM; Abd-alla AN; Zeidan NA (2000) Thermal stresses in a non-homogeneous orthotropic elastic multilayered cylinder. J Themal Stresses, Vol. 23, pp. 413–428
El-Naggar AM; Abd-Alla AM; Ahmed SM; Fahmy MA (2001) Thermal stresses in a rotating non-homogeneous orthotropic hollow cylinder accepted for puplication in Heat and Mass Transfer
Janele P; Hadow JB; Mioduchowski A (1989) Finite amplitude spherically symmetric wave propagation in a compressible hyperelastic solid. Acta Mechanica, Vol. 79, pp. 25–41
Knopoff L (1955) The interaction between elastic wave motion and magnetic field in electrical counduction. J Geophys Res, Vol. 60, p. 441
Nowacki W (1975) Dynamic Problems of Thermoelasticity. Noordhooff International, The Netherlands
Kaliski S (1965) Wave equation of thermo-electro-magnetoelasticity, Proceding of Vibrations Problems, Vol. 6, 231
Suhubi ES (1964) Longitudinal vibration of a circular cylinder coupled with a thermal field. J Mech Phys Solids, Vol. 12, pp. 69–75
Mukhopodhyay SB; Roychoudhurj SB (1997) Magneto-thermo-elastic interactions in an infinite isotropic elastic cylinder subjected to a periodic loading. Int J Eng Sci, Vol. 35, pp. 437–444
Haddow JB; Mioduchowski A (1962) Dynamic expansion of a compressible hyperelastic spherical shell. Acta Mechanica, 26, pp. 179–187
Haddow JB; Mioduchowski A (1975) Analysis of expansian of spherical cavity in unbounded hyperelastic medium by method of characteristic, Acta Mechanica, Vol. 66, pp. 219–234
Watchtman JB; Teff WE; Stinchfield RP (1960) Elastic constants of synthetic crystal corundum at room temperature. J Res Natl Burea of Standards Phys Chem, Vol. 64, pp. 211–228
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Abd-Alla, A.M., El-Naggar, A.M. & Fahmy, M.A. Magneto-thermoelastic problem in non-homogeneous isotropic cylinder. Heat and Mass Transfer 39, 625–629 (2003). https://doi.org/10.1007/s00231-002-0370-3
Received:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00231-002-0370-3