
Abstract
There is some evidence that signals coming from both arms are used to determine the perceived position and movement of one arm. We examined whether the sense of position and movement of one (reference) arm is altered by increases in muscle spindle signals in the other (indicator) arm in blindfolded participants (n = 26). To increase muscle spindle discharge, we applied 70–80 Hz muscle vibration to the elbow flexors of the indicator arm. In a first experiment, proprioceptive illusions in the vibrated reference arm in a forearm position-matching task were compared between conditions in which the indicator arm elbow flexors were vibrated or not vibrated. We found that the vibration illusion of arm extension induced by vibration of reference arm elbow flexors was reduced in the presence of vibration of the indicator elbow flexors. In a second experiment, participants were asked to describe their perception of the illusion of forearm extension movements of the reference arm evoked by vibration of reference arm elbow flexors in response to on/off and off/on transitions of vibration of non-reference arm elbow flexors. When vibration of non-reference arm elbow flexors was turned on, they reported a sensation of slowing down of the illusion of the reference arm. When it was turned off, they reported a sensation of speeding up. To conclude, the present study shows that both the sense of limb position and the sense of limb movement of one arm are dependent to some extent on spindle signals coming from the other arm.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Proprioceptive input coming from the primary endings of muscle spindles contributes to kinesthetic senses, the sense of position and the sense of movement (Goodwin et al. 1972; Proske 2006). Muscle vibration selectively excites the primary endings of muscle spindles (Roll et al. 1989) and has been used in studies that investigate the role of muscle spindle activity in proprioceptive sensation.
The sense of limb position is commonly measured in the arms using a two-arm matching task (Gregory et al. 1988; Gooey et al. 2000; Ishihara et al. 2004; Izumizaki et al. 2010). An experimenter places the blindfolded participant’s reference arm at a particular elbow angle, and the participant is asked to match it by placement of their other (indicator) arm. Muscle vibration of the reference arm is often combined with this task. When elbow flexors of the reference arm are vibrated, the blindfolded participants place their indicator arm at an extended position to specify the position of the unseen reference arm (Gregory et al. 1988; Gooey et al. 2000; Ishihara et al. 2004; Izumizaki et al. 2010). A plausible explanation for this vibration illusion is that the indicator arm must move in a direction that increases spindle activity in its muscles to match the activity in the vibrated reference arm.
White and Proske (2009) reported that vibrating elbow flexors of the indicator arm, not the reference arm, produced significant position matching errors in this matching task, where the participants moved their vibrated indicator arm in the direction of flexion to match it to the reference arm. Their explanation for this was that the indicator arm must move in a direction that reduces spindle activity in its vibrated muscles to match the activity in the non-vibrated reference arm (White and Proske 2009). This explanation assumes that the felt position of the reference arm itself does not change. Nevertheless, there is some evidence that proprioceptive signals coming from both arms are used to determine the felt position and movement of one arm (Lackner and Taublieb 1983; Lackner 1984; Izumizaki et al. 2010; Tsuge et al. 2012). The felt position may represent a difference signal calculated from the input coming from both arms. For example, when one arm is moved into extension, this leads to perception of a slower vibration illusion in the other arm (Izumizaki et al. 2010). Because arm extension raises the spindle signal in its own elbow flexors, the difference in spindle discharge rate between the two arms becomes less. What is felt during vibration illusion is based, at least in part, on a difference signal derived from the inputs from both arms (Izumizaki et al. 2010). In this context, the indicator arm vibration may change the vibration illusion of arm extension induced by reference arm vibration because the indicator arm vibration reduces the relative increase in muscle spindle activity in the reference arm in response to reference arm vibration.
In the present study, we examined whether proprioceptive illusions in one arm are altered by increases in the muscle spindle signals in the other arm, using two vibrators. In Experiment 1, we examined whether the vibration illusion of arm extension in the reference arm is reduced by muscle vibration of the indicator arm in a two-arm matching task. The participant was asked to match the vibrated reference arm with the placement of their other, vibrated indicator arm. Reference arm vibration should make the participants perceive their reference arm to be more extended, compared with when the reference arm is not vibrated. For this experiment, we hypothesized that the effect of vibration of one arm on the position sense of this arm would interact with the effect of vibration of the other arm. In Experiment 2, we tested the hypothesis that the illusion of arm movement evoked by the vibration of the elbow flexors of one arm was manipulated by muscle vibration of the other arm. Participants were asked to describe what they had felt when the vibration of the other arm was turned on and off. In Experiment 3, we examined whether the tonic vibration reflex (TVR) of the elbow flexors of one arm was affected by muscle vibration of the elbow flexors of the other arm. Presumably, this experiment gives us a clue as to whether muscle spindle sensitivity to vibration is affected by contralateral vibration. The purpose of Experiment 4 was to exclude the possibility that salient tactile stimuli to one arm, which do not involve spindle information, affect the illusory sense of the other arm.
Methods
Participants
A total of 26 participants (24 males, two females, mean age = 29.8 years) took part in the experiments. Experiment 1 involved 12 right-handed participants (11 males, one female). Experiment 2 involved nine right-handed participants (eight males, one female). Experiment 3 involved 10 male participants, and two of the 10 participants were left-handed. Experiment 4 involved five male participants, and one of the five participants was originally left-handed but ambidextrous through training. Three participants took part in Experiments 1, 2, and 3, one participant in Experiments 1 and 2, and three participants in Experiments 2 and 3. Participants gave their written informed consent before undertaking the experiments, which were approved by the Showa University Committee for Human Experimentation. Ethical aspects of the experiments conformed to the Declaration of Helsinki. All experiments were performed under blindfolded conditions.
Testing apparatus
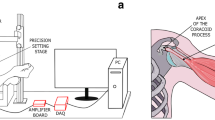
The experiment involved matching the positions of the forearms in the vertical plane using a custom-built device (Fig. 1a) (Tsuge et al. 2012). The device has two paddles, one on the right and one on the left. There was a partition between the two arms. The participant was blindfolded and sat at a table, with each forearm supported by a paddle, hinged at a point close to the elbow joint. The right forearm was strapped to the right paddle and set at an angle of 30° from horizontal, with a support block under the paddle. The left forearm was strapped to the left paddle. In Experiment 1, the left forearm was used as an indicator that measured the perceived position of the reference arm.

Apparatus and protocol. a The device has two paddles, one on the right and one on the left. There was a partition between the two arms. The participant was blindfolded and sat at a table, with each forearm supported by a paddle, hinged at a point close to the elbow joint. The right forearm was strapped to the right paddle and set at an angle of 30° from horizontal, with a support block under the paddle. The left forearm was strapped to the left paddle. In Experiment 1, participants were asked to move the indicator arm down from 75° and match the position of the reference arm to that of the indicator arm (left arm). b Schema of Experiment 1. The right arm (dashed line) was the reference arm and always placed at the test angle of 30°. Before each trial, both arms were contracted to put them in a comparable mechanical state (conditioning). After conditioning, an experimenter moved the indicator arm to 75°. The participants were then asked to match the position of the indicator arm (continuous line) to that of the reference arm while the elbow flexors of both arms were being vibrated. When the participants declared a match, the matching position was determined. When the indicator arm was placed in a more flexed position than the reference arm, the angle was expressed as a negative value. c Schema of Experiment 2. At the start, both vibrators were turned on. Then, the vibrator on the non-reference arm was turned off and on three to four times every 20–30 s in a trial. Participants were asked to describe what they had felt about the vibration illusion of the reference arm in response to on/off and off/on transitions of the non-reference arm vibration
Measurement of angles
The angles of the right and left forearms were measured relative to horizontal. A rotary encoder (E6H-CWZ6C, OMRON, Kyoto, Japan) was fixed to the side of each paddle. The encoder provided a pulse output every 0.1° above horizontal (0°). The number of pulses was counted by a pulse meter (K3HB-C, OMRON) that sent a linear output signal to a recording device (Power Lab, 4/20, ADInstruments, Castle Hill, NSW, Australia). All data were analyzed using Chart software (Version 5.5.6, ADInstruments) on a computer.
Vibrators
We used two custom-made vibrators. Each vibrator had a motor-driven eccentric disk, which was enclosed in a plastic box measuring 50 mm × 60 mm × 88 mm. The vibration amplitude was approximately 1 mm, and the frequency could be adjusted to lie in the range 70–80 Hz, close to the optimum for engaging responses from muscle spindles (Roll et al. 1989). In Experiments 1, 2, and 3, each vibrator was placed on the distal tendon of the biceps of each arm by means of elastic straps. In Experiment 4, one vibrator was placed on the distal tendon of the biceps of the reference arm (right arm) to elicit the illusion of movement, and the other vibrator was on the distal tendon of the biceps of the non-reference arm (muscle vibration) or the epicondylus medialis humeri of the non-reference arm (bone vibration).
Muscle conditioning before matching
Before each trial, both arms were conditioned to place them in an identified and comparable mechanical state (Gregory et al. 1988) because the previous history of length changes and contractions affect muscle spindle sensitivity by means of muscle thixotropy (Proske et al. 1993). To do this, each biceps muscle was conditioned at 30°. For conditioning, the participant was asked to flex each arm with a contraction of 30–50 % of maximum for 3 s while the experimenter held the participant’s wrists; the participant was then asked to relax, while the experimenter held the forearms at each tested angle. After conditioning, the participant was directed to maintain the position of the left forearm.
Experiment 1
The aim of the experiment was to examine whether muscle vibration of the indicator arm affected reference arm vibration-induced position illusions in a two-forearm position-matching task in the vertical plane (n = 12) (Fig. 1a). A schema for Experiment 1 is shown in Fig. 1b. After conditioning of both arms, the indicator arm (left arm) was placed at 75° to the horizontal. The reference arm (right arm) was always placed at the test angle of 30°. In some participants, a TVR developed in elbow flexors during the reference arm vibration. This was not a problem, since the vibrated reference arm was kept at the test angle by an experimenter. Participants were asked to match the position of the reference arm with the indicator arm (left arm). They moved their indicator arm in the direction of extension from 75°.
Matching was carried out under four different conditions (with and without vibration of elbow flexors of the reference arm, and with and without vibration of elbow flexors of the indicator arm). The different conditions were presented in random order, and each condition was repeated five times, making a total of 20 trials. When the indicator arm was placed in a more extended position than the reference arm, the mismatch angle was expressed as a positive value; when the indicator arm was placed in a more flexed position, the angle was expressed as a negative value (Fig. 1b).
Experiment 2
In this experiment, participants did not use their non-reference arm as an indicator specifying the illusory sense of their reference arm. Instead, they were asked to describe the illusory sense of their reference arm. This was a one-arm proprioceptive test, not a two-arm matching test. We aimed to determine whether this one-arm proprioceptive test includes some input from the non-reference arm.
A schema for Experiment 2 is shown in Fig. 1c. This experiment examined whether muscle vibration of the non-reference arm (left arm) altered the illusion of movement produced by vibration of the reference arm (right arm) (n = 9). Conditioning contractions were carried out as in Experiment 1. Both forearms were supported on a block at 30° and kept at the test angle by the experimenter even if a TVR developed. At the start, both vibrators were turned on. Once the vibration illusion of the reference arm had manifested itself, the vibrator on the non-reference arm was turned off and on three to four times every 20–30 s in a test. Participants’ perception of movement illusion was examined in a qualitative manner: participants were asked to describe what they had felt about the vibration illusion of the reference arm in response to on/off and off/on transitions of the non-reference arm vibration. They were advised in advance to focus their awareness on the vibration illusion of the reference arm. This test was repeated at intervals of several minutes, if necessary until they reached their conclusion.
Experiment 3
We measured the TVR of the elbow flexors of one arm during muscle vibration of the elbow flexors of the other arm (n = 10). Mechanical vibration applied to the tendon or belly of a skeletal muscle induces an involuntary tonic reflex contraction in the muscle, which is referred to as TVR (Eklund and Hagbarth 1966). TVR of elbow flexors elicits an involuntary forearm elevation when participants keep their forearm at a particular angle against gravitational force (Ishihara et al. 2004). During the TVR, a higher speed of forearm elevation represents a higher electromyographic activity of the biceps (Ishihara et al. 2004). The strength of the TVR was quantified based on the elevation speed of the right forearm (Ishihara et al. 2004; Sekihara et al. 2007).
Both arms strapped to their supporting paddles were conditioned at 30° beforehand. Vibration (70–80 Hz) was applied to the distal tendon of the right biceps to evoke a TVR and elevate the right forearm. During measurement of the TVR in the right arm, the left arm was vibrated simultaneously (vibration condition), but elevation of the left forearm was prevented by an experimenter. The movement trace drawn by the right forearm was used to calculate the elevation speed. Because electromyography shows a delay between the start of muscle vibration and that of the TVR (Nakajima et al. 2009), the speed was averaged from the start of actual forearm elevation to the end of vibration by means of Chart software (ADInstruments). The elevation speed was also measured without vibration of the left arm (no vibration condition). Each trial was performed five times, and the five sets of data for each participant were averaged.
Experiment 4
Experiment 4 examined whether bone vibration of the non-reference arm (left arm) altered the illusion of movement produced by vibration of the reference arm (right arm) (n = 5). Both forearms were supported on a block at 30° and kept at the test angle by an experimenter. At the start, both vibrators were turned on. Once the vibration illusion of the reference arm had manifested itself, the vibrator on the non-reference arm (muscle or bone vibration) was turned off and on three to four times every 20–30 s in a test. Participants’ perception of movement illusion was examined in a qualitative manner. The order of vibrated places (muscle or bone) was changed randomly in each participant.
Statistics
We used commercially available software packages for the analysis. In Experiment 1, angle differences were compared with two-way repeated-measures analysis of variance (ANOVA) to test for within-factor effects (the reference arm vibration effect and the indicator arm vibration effect) and interactions between these effects (IBM SPSS Statistics 19; SPSS Inc., Chicago, IL, USA). In Experiment 3, the strengths of TVRs were compared using Student’s paired t tests (InStat; GraphPad Software Inc., La Jolla, CA, USA). The threshold for significance was p < 0.05. Values are given as mean ± standard error of the mean (SEM).
Results
Experiment 1
We measured reference arm vibration-induced position illusions in a two-forearm position-matching task, while the indicator arm was being vibrated. One male participant was excluded from the final analysis of the results of Experiment 1 because the data contained outliers, defined as values ± 2 standard deviations beyond the group mean.
Data from a representative participant
Traces from a representative (male) participant are shown in Fig. 2. Each panel shows one of five trials for each condition. Each panel shows a continuous trace as the indicator arm was moved to a matching position. The end of the trace relative to the dashed line shows the accuracy of the match.

Position matching. Position matching by a single participant. Blindfolded matching was carried out at the right (reference) arm angle of 30°, with and without vibration of the elbow flexors of the right arm, and with and without vibration of the elbow flexors of the left (indicator) arm. Thus, there were four conditions: a a no vibration condition; b a reference arm vibration condition; c an indicator arm vibration condition; and d a reference and indicator arms vibration condition. Each panel represents a single matching trial. The participant was asked to place the indicator arm at the angle of the perceived reference position. The forearm angle relative to horizontal during each trial is plotted against time. In each panel the dashed line indicates the position of the reference forearm (30°), while the continuous line indicates the position of the indicator arm. An angle of 0° represents the horizontal position, and an angle of 90° represents the vertical position
Figure 2a and b represent trials performed when the indicator arm was not vibrated. When neither the reference arm nor the indicator was vibrated (Fig. 2a), the participant was able to accurately match the indicator arm with the unseen reference arm. For this individual, the mean error for five trials was 2.3° (Fig. 3a). When the reference arm was vibrated, the mean error for five trials was 26.9° (Figs. 2b, 3a). This means that the reference arm vibration caused the participant to feel his reference arm to be more extended by 24.6° (26.9°–2.3°).

Position-matching errors and vibration-induced extension illusions. a Angle differences for each of five trials for a particular condition by the participant. Angle difference was calculated as the position of the reference arm minus the position of the indicator arm. 0° represents a perfect match. Positive errors are where the indicator arm is placed in a more extended position relative to the reference; negative errors are where the indicator arm is placed in a more flexed position relative to the reference. b Pooled data for all 11 participants. A two-way repeated-measures analysis of variance revealed a reference arm vibration effect (*p < 0.05), an indicator arm vibration effect (†p < 0.05), and an interaction between these effects (‡ p < 0.05). Values are mean ± standard error of the mean (SEM)
The matching task was then repeated but with the indicator arm vibrated (Fig. 2c and d). When the indicator arm was vibrated but the reference arm was not, the participant adopted a position for the indicator arm in the direction of flexion relative to the position of the reference arm (Fig. 2c). The mean error in five trials for this participant was −15.5° (Fig. 3a). When reference arm vibration was added, the position specified by the vibrated indicator arm was still in the direction of flexion (Fig. 2d). The mean error for five trials was −3.2° (Fig. 3a). This means that the reference arm vibration caused the participant to feel his reference arm to be more extended by 12.3° when the indicator arm was vibrated. Therefore, for this participant, the size of the extension illusion elicited by the reference arm vibration was smaller when the indicator arm was vibrated (12.3°) than when it was not vibrated (24.6°).
Data for the group
The pooled data for the 11 participants are shown in Fig. 3b. The mean position error with participants blindfolded was 3.5° ± 1.0° (no vibration). When the reference arm was vibrated, the error was 17.3° ± 2.1° (reference arm vibration). This means that the reference arm vibration caused the participants to feel their reference arm to be more extended by approximately 13.8° when the indicator arm was not vibrated. When the indicator arm was vibrated without the reference arm being vibrated, the error was −20.1° ± 2.8° (indicator arm vibration). When both the reference and indicator arms were vibrated, the error was −11.2° ± 2.3° (reference arm vibration, indicator arm vibration). This means that, when the indicator arm was vibrated, the reference arm vibration caused the participants to feel their reference arm to be more extended by only 8.9°.
We analyzed the results using a two-way ANOVA. Both main effects (the reference arm vibration effect, F = 71.8, p < 0.001; the indicator arm vibration effect, F = 45.7, p < 0.001) were significant. The existence of a significant interaction between the two (reference arm vibration effect × indicator arm vibration effect, F = 8.4, p = 0.016) suggests that reference arm vibration-induced position errors are smaller in the presence of indicator arm vibration than in the absence of indicator arm vibration. That is, the vibration illusion of arm extension, which was represented by angle differences between conditions with and without the reference arm vibration, was reduced by indicator arm vibration.
Experiment 2
We asked the participants to describe what they felt regarding the illusion of movement produced by the reference arm vibration at the time of the on/off and off/on transitions of non-reference arm vibration. At the start, both reference arm vibration and non-reference arm vibration were turned on. An illusory sense of arm extension movement developed in the vibrated reference arm. When non-reference arm vibration was turned off, all participants reported a sensation of speeding up of the movement of the vibrated reference arm. When non-reference arm vibration was turned on, all participants reported a sensation of slowing down of the movement of the vibrated reference arm.
Experiment 3
We measured the strength of the TVRs of the elbow flexors of one arm while the elbow flexors of the other arm were being vibrated. One male participant was excluded because forearm elevation was not observed.
Data from a representative participant
Example traces for one male participant are shown in Fig. 4a. The participant is the same person for whom results are shown in Figs. 2 and 3a. When his right biceps was vibrated, his right forearm was elevated in a similar way, regardless of left arm vibration. For this individual, the mean speeds of right arm elevation during TVR periods were 2.8°/s without left arm vibration and 2.7°/s with left arm vibration (Fig. 4b).

Tonic vibration reflex (TVR). a Changes in elbow angle of the right arm with TVR in a single participant. The speed of forearm elevation was similar between conditions with the absence (continuous trace) and presence (dashed trace) of left arm vibration. b The speed of forearm elevation in each of five trials in a particular condition by the participant. c Pooled data for all nine participants. There was no significant difference in the speed of forearm elevation between the two conditions (NS not significant). Values are mean ± SEM
Data for the group
Pooled data for all nine participants are shown in Fig. 4c. There was no significant difference in the speed of right forearm elevation during the TVR between conditions with the presence and absence of left arm vibration.
Experiment 4
We asked the participants to describe what they felt regarding the illusion of movement produced by the reference arm vibration at the time of the on/off and off/on transitions of non-reference arm muscle vibration or that of non-reference arm bone vibration. We confirmed the results of Experiment 2. The participants reported a sensation of speeding up and slowing down of the movement of the vibrated reference arm, in response to on/off and off/on transitions of the non-reference arm muscle vibration, respectively. At the time of on/off or off/on transitions of the non-reference arm bone vibration, three of the five participants reported changes in the speed of the illusory movement of the vibrated reference arm in a similar manner to the non-reference arm muscle vibration. However, the influence of bone vibration was less clear than that of muscle vibration. The other two participants did not report changes in the sensation of the movement of the vibrated reference arm at the time of the on/off or off/on transitions of the non-reference arm bone vibration.
Discussion
In Experiment 1, indicator arm vibration influenced position sense errors in a two-arm matching task. In addition, in this experiment, the vibration illusion of arm extension in one arm was reduced while the other arm was being vibrated. In Experiment 2, the speed of the illusion of elbow extension evoked by vibration of one arm was altered by vibration of the other arm. Because muscle vibration selectively excites the primary endings of muscle spindles (Roll et al. 1989), the sense of position and movement of one arm was influenced by the muscle spindle signals of the other arm. However, the results of Experiment 3 suggest that reduced vibration illusion when both arms were vibrated was not due to a suppression of spindle afferent signals in the other arm. Left arm vibration did not affect the strength of the TVR in the right arm. In Experiment 4, the influence of bone vibration of the other arm on the speed of the illusion of elbow extension evoked by vibration of one arm was less clear than that of muscle vibration of the other arm.
In Experiment 1, when the indicator arm was not vibrated, vibration of the reference arm produced an illusion of the vibrated arm moving into extension, and, at the end of vibration, the position of the indicator arm adopted by the participant was 17.3° in the direction of extension beyond the reference arm (Fig. 3b). This phenomenon was reported previously (Goodwin et al. 1972), and it can be explained by increased spindle signals coming from the vibrated reference arm. Because muscle spindles increase their discharge rates in response to their stretch, a higher rate of spindle signals is presumably interpreted by the brain as a longer muscle (Allen et al. 2007). Therefore, it is likely that vibration of elbow flexor muscles increases the spindle discharge rate and causes participants to perceive the elbow as more extended.
We found that vibration of elbow flexors in the indicator arm caused matching errors in the direction of flexion, regardless of whether the reference arm was vibrated. These findings are consistent with those reported by White and Proske (2009). Furthermore, a significant interaction between effects (reference arm vibration effect × indicator arm vibration effect) suggested that the size of the extension illusion elicited by vibration of reference elbow flexors was smaller in the presence of vibration of indicator elbow flexors than in its absence. The difference in angle between the reference arm vibration condition and the no reference arm vibration condition shown in Fig. 3b represents the extension illusion produced by increased spindle activity owing to reference arm vibration. Our interpretation of the reduction in extension illusions by indicator arm vibration is that what is felt is, at least in part, a difference signal calculated from the spindle input coming from both arms. If the indicator arm is vibrated, spindles in its own elbow flexors will increase their level of discharge (Roll et al. 1989). As a result, the difference in spindle discharge rate between the vibrated reference arm and the vibrated indicator arm will reduce. This would lead to the perception of a smaller vibration illusion in the reference arm when indicator elbow flexors are vibrated.
When both arms were vibrated, the position error was not zero (Fig. 3b). The position specified by the vibrated indicator arm was in the direction of flexion (−11.2° ± 2.3°). If the brain uses a difference signal, why was there such an overall error into flexion? One possible explanation is that the flexion movement due to TVR occurred in the indicator arm because the TVR is facilitated by a weak or moderate voluntary muscle contraction in the vibrated muscle (Eklund and Hagbarth 1966). In this experiment, the reference arm was held, but the vibrated elbow flexors of the indicator arm were voluntarily contracting to support the left forearm against gravity during matching.
Similarly to Experiment 1, in Experiment 2, when the left arm (non-reference arm) was vibrated, this should increase the spindle discharge in its own elbow flexors; therefore, the difference in spindle discharge rates between the two vibrated arms reduced. This led to the perception of an illusion of slower movement of the reference arm. This illusion of slower movement relates directly to that reported by Izumizaki et al. (2010), who showed that the perceived speed of extension of the reference arm owing to vibration of its elbow flexors was reduced by moving the other arm into extension and increased by moving it into flexion. Presumably, when the indicator arm is moved into extension, this raises the spindle signal in its own elbow flexors. Therefore, spindle discharge differences between the arms would change, potentially playing a role in the alternation of vibration-induced movement illusion of one arm by means of movement of the other arm reported by Izumizaki et al. (2010). In Experiment 4, the non-reference bone vibration had smaller effects than the non-reference muscle vibration on the illusion of movement produced by muscle vibration of the reference arm. This result suggests that muscle spindle signals from the non-reference arm play a major role in changes in the perception of vibration illusion in the reference arm. Because it was possible that bone vibration mechanically spread to the spindles of the biceps in the non-reference arm, this may explain the finding that the non-reference bone vibration showed small but significant effects in three of the five participants.
The results of Experiments 1 and 2 raise the question of whether muscle vibration of non-reference elbow flexors decreases spindle signals from the reference arm. Our TVR results suggest that it does not. In Experiment 3, we observed a similar TVR of the biceps of one arm in both the presence and absence of muscle vibration of the other arm. Although the TVR is mediated by monosynaptic and polysynaptic pathways (Edin 2001), the similarity of the TVR suggests that the extent of muscle spindle signals sent from one arm is not affected by muscle vibration of the other arm. Nevertheless, a study limitation regarding the use of the TVR as an indicator of spindle signals includes the possibility that its intensity does not reflect spindle signals because, in contrast to the tendon jerk, the TVR can be suppressed voluntarily (De Gail et al. 1966).
It is likely that spindle signals from both arms are integrated in the brain and that a difference signal is then produced by neuronal computation to determine the perceptual representation of arm position. Presumably, a central comparator interprets patterns of incoming kinesthetic signals, based on past experience. This may be a motor control strategy to allow the two arms to act as a single instrument in the execution of skilled tasks (Izumizaki et al. 2010; Proske and Gandevia 2012). It could be hypothesized, for example, that the brain uses information from the other arm only when it is appositionally relevant. The location of the indicator arm might play a role in exerting its effect on the proprioceptive sense of the reference arm. This effect might be lessened if the indicator arm was placed in a position in which it is no longer as relevant to the reference arm. One of our ongoing research objectives is aimed at verifying this hypothesis.
To conclude, the results of the present study show that both the sense of limb position and the sense of limb movement of one arm are dependent to some extent on spindle signals coming from the other arm.
References
Allen TJ, Ansems GE, Proske U (2007) Effects of muscle conditioning on position sense at the human forearm during loading or fatigue of elbow flexors and the role of the sense of effort. J Physiol 580:423–434. doi:10.1113/jphysiol.2006.125161
De Gail P, Lance JW, Neilson PD (1966) Differential effects on tonic and phasic reflex mechanisms produced by vibration of muscles in man. J Neurol Neurosurg Psychiatry 29:1–11
Edin B (2001) Cutaneous afferents provide information about knee joint movements in humans. J Physiol 531:289–297
Eklund G, Hagbarth KE (1966) Normal variability of tonic vibration reflexes in man. Exp Neurol 16:80–92
Goodwin GM, McCloskey DI, Matthews PB (1972) The contribution of muscle afferents to kinaesthesia shown by vibration induced illusions of movement and by the effects of paralysing joint afferents. Brain 95:705–748
Gooey K, Bradfield O, Talbot J, Morgan DL, Proske U (2000) Effects of body orientation, load and vibration on sensing position and movement at the human elbow joint. Exp Brain Res 133:340–348
Gregory JE, Morgan DL, Proske U (1988) Aftereffects in the responses of cat muscle spindles and errors of limb position sense in man. J Neurophysiol 59:1220–1230
Ishihara Y, Izumizaki M, Atsumi T, Homma I (2004) Aftereffects of mechanical vibration and muscle contraction on limb position-sense. Muscle Nerv 30:486–492
Izumizaki M, Tsuge M, Akai L, Proske U, Homma I (2010) The illusion of changed position and movement from vibrating one arm is altered by vision or movement of the other arm. J Physiol 588:2789–2800. doi:10.1113/jphysiol.2010.192336
Lackner JR (1984) Some influences of tonic vibration reflexes on the position sense of the contralateral limb. Exp Neurol 85:107–113
Lackner JR, Taublieb AB (1983) Reciprocal interactions between the position sense representations of the two forearms. J Neurosci 3:2280–2285
Nakajima T, Izumizaki M, Sekihara C, Atsumi T, Homma I (2009) Combined effects of preceding muscle vibration and contraction on the tonic vibration reflex. Exp Brain Res 192:211–219. doi:10.1007/s00221-008-1571-x
Proske U (2006) Kinesthesia: the role of muscle receptors. Muscle Nerv 34:545–558. doi:10.1002/mus.20627
Proske U, Gandevia SC (2012) The proprioceptive senses: their roles in signaling body shape, body position and movement, and muscle force. Physiol Rev 92:1651–1697. doi:10.1152/physrev.00048.2011
Proske U, Morgan DL, Gregory JE (1993) Thixotropy in skeletal muscle and in muscle spindles: a review. Prog Neurobiol 41:705–721
Roll JP, Vedel JP, Ribot E (1989) Alteration of proprioceptive messages induced by tendon vibration in man: a microneurographic study. Exp Brain Res 76:213–222
Sekihara C, Izumizaki M, Yasuda T, Nakajima T, Atsumi T, Homma I (2007) Effect of cooling on thixotropic position-sense error in human biceps muscle. Muscle Nerv 35:781–787
Tsuge M, Izumizaki M, Kigawa K, Atsumi T, Homma I (2012) Interaction between vibration-evoked proprioceptive illusions and mirror-evoked visual illusions in an arm-matching task. Exp Brain Res 223:541–551. doi:10.1007/s00221-012-3281-7
White O, Proske U (2009) Illusions of forearm displacement during vibration of elbow muscles in humans. Exp Brain Res 192:113–120. doi:10.1007/s00221-008-1561-z
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Hakuta, N., Izumizaki, M., Kigawa, K. et al. Proprioceptive illusions created by vibration of one arm are altered by vibrating the other arm. Exp Brain Res 232, 2197–2206 (2014). https://doi.org/10.1007/s00221-014-3911-3
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-014-3911-3