
Abstract
People often grasp objects with an awkward grip to ensure a comfortable hand posture at the end of the movement. This end-state comfort effect is a predominant constraint during unimanual movements. However, during bimanual movements the tendency for both hands to satisfy end-state comfort is affected by factors such as end-orientation congruency and task context. Although bimanual end-state comfort has been examined when the hands manipulate two independent objects, no research has examined end-state comfort when the hands are required to manipulate two physically-coupled objects. In the present experiment, kinematics and grasp behavior during a unimanual and bimanual reaching and placing tasks were examined, when the hands manipulate two physically-connected objects. Forty-five participants were assigned to one of three groups; unimanual, bimanual no-spring (the objects were not physically connected), and bimanual spring (the objects were connected by a spring), and instructed to grasp and place objects in various end-orientations, depending on condition. Physically connecting the objects did not affect end-state comfort prevalence. However, it resulted in decreased interlimb coupling. This finding supports the notion of a flexible constraint hierarchy, in which action goals guide the selection of lower level action features (i.e., hand grip used for grasping), and the particular movements used to accomplish that goal (i.e., interlimb coupling) are controlled throughout the movement.
Similar content being viewed by others


Avoid common mistakes on your manuscript.
Introduction
Most daily tasks require movements to be planned with respect to future task goals. For example, when grasping an empty cup from a shelf to place it on a counter top, people will typically grasp the cup using the whole hand. However, if the cup is filled with hot coffee, people are more likely to grasp the cup by the handle so as to not burn their hands. Motivated by this and other demonstrations from daily life, Rosenbaum and colleagues examined how task goals constrain grip selection in grasping and placing tasks. In their initial study (Rosenbaum et al. 1990), participants grasped a horizontally positioned bar and placed it vertically to the left or right of the initial starting position. Participants grasped the object in an awkward fashion (regardless of target location), thereby ensuring a comfortable hand posture at the end of the movement. This end-state comfort effect appears to be a predominant constraint during unimanual movements, and leads to the inference that individuals plan final goal postures prior to movement execution.
Because many everyday activities require the use of both hands, recent studies have examined if the end-state comfort effect extends to bimanual movements (Fischman et al. 2003; Hughes and Franz 2008; Janssen et al. 2009, 2010; van der Wel and Rosenbaum 2010; Weigelt et al. 2006). However, the principles that underlie bimanual movements cannot always be inferred from single-limb movements (Kelso 1984; Franz 2003; Franz et al. 1991, 1996, 2001; Kelso et al. 1979). Previous work has demonstrated that there is a strong tendency for the hands to stay spatially and temporally coupled when performing bimanual movements (Franz et al. 1991, 1996, 2001; Franz 2003; Kelso et al. 1979). These coupling effects relate to the movement goals of the task rather than the movements required to perform those actions (Kunde and Weigelt 2005; Kunde et al. 2009; Weigelt 2007; Weigelt et al. 2007).
During bimanual object manipulation tasks, participants must weigh the tendency to adopt initial grips that allow for comfortable end-postures against the tendency to grasp the objects using identical grips so that the hands remain bimanually coupled. In general, participants adopt grips that allow them to satisfy both end-state comfort and bimanual coupling when the end-goals of both hands are identical. When objects are placed in an incongruent orientation, the degree to which the end-state comfort constraint dominated the bimanual coupling constraint differed depending on the experimental paradigm. For example, Weigelt et al. (2006) observed a strong tendency for both hands to end comfortably. However, in studies where the end-orientations of the objects could either be identical (congruent) or different (incongruent), end-state comfort was not always satisfied. Rather, when objects were placed in incongruent orientations, the bimanual coupling constraint was satisfied as often as the end-state constraint (Hughes and Franz 2008; Janssen et al. 2009), demonstrating that the relationship between end-state comfort and bimanual coupling constraints is influenced by object end-orientation.
In addition, this relationship is also influenced by factors such as hand (Janssen et al. 2009, 2011), handedness (Janssen et al. 2009, 2011), the absolute position of the target (Fischman et al. 2003), and object mass distribution (van der Wel and Rosenbaum 2010). To explain the results from the previously outlined studies, van der Wel and Rosenbaum (2010) proposed that the relationship between the end-state comfort and bimanual coupling constraint is not fixed, but can change depending on the situation and context in which the task is performed. They speculate that in the first stages of a new motor skill, constraints are weighted (relative to one another) based upon previous experience in similar tasks, and that as participants begin to define and possible redefine optimal task performance, the relative importance of constraints may change.
Although past research has yielded important insight into how individuals plan and execute movements involving both hands, the objects utilized were physically independent. However, many manual tasks (e.g., using a broom, turning the pages of a book) require the interaction of both hands on a common object. It is largely unknown if the relationship between end-state comfort and bimanual coupling constraints changes when the hands manipulate physically-coupled objects, compared to two separate objects. It is possible that previous bimanual research does not extend to coupled objects, since, when objects are connected, the hands must work together in a cooperative fashion in order to achieve their individual task goals. During movements in which the objects are physically connected, the self-generated perturbations associated with acting on the two objects require each hand to generate sufficient force (to counteract the initial perturbation against the direction of force applied by the other hand), as well as maintain the appropriate level of force throughout the task. Using the constraint dominance framework (van der Wel and Rosenbaum 2010), it is possible that physically connecting the two objects is another constraint that the central nervous system (CNS) must take into consideration when planning and executing a movement. Thus, we examined whether the relationship and relative importance of the end-state comfort and bimanual coupling constraints is influenced by physically-coupled object manipulation. Because connecting the two objects adds another constraint that must be taken into account, if participants weight the tendency to control the forces encountered throughout the movement over the tendency to end the movement in a comfortable posture, then the degree of end-state comfort satisfaction should be lower when the objects are physically connected, compared to when they are separate.
It is possible that physically connecting the objects may not only influence the satisfaction of end-state comfort, but may also change the kinematics of the movement. Examining movement kinematics may be important since there is a wealth of evidence suggesting that object manipulation is influenced by the physical properties of the environment (Chieffi and Gentilucci 1993; Jeannerod 1984), the object to be grasped (Bootsma et al. 1994; Marteniuk et al. 1987; Weir et al. 1991), and our intentions (Claxton et al. 2003; Marteniuk et al. 1987). For example, Marteniuk et al. (1987) analyzed movement trajectories during a unimanual grasp and place task, when the object properties (tennis ball vs. light bulb) and future task demands (placing an object in a small hole vs. a box) were manipulated. When the object was to be placed into a small hole (high degree of precision), participants took longer to reach for the object, than when they had to throw the object into a bucket (low degree of precision). The authors also compared the kinematics during reaching and grasping for a light bulb with that for a tennis ball. They observed a longer deceleration phase when participants reached for the light bulb, indicating that prior knowledge about the object properties (i.e., its fragility) influenced the manner in which the task is performed. These studies show that movement kinematics during a unimanual reaching task are prospectively controlled based on the future action goals of the individual. In the current experiment, we examined if the same anticipatory changes observed in the unimanual grasping literature are present in a bimanual task with varying movement constraints.
There were therefore two purposes for the present study. The first purpose was to examine if the relationship between end-state comfort and bimanual coupling differed when participants manipulated two connected objects compared to when they manipulated two independent objects. We hypothesized that participants would weigh the tendency to control the forces encountered throughout the movement over the tendency to end the movement with a comfortable posture. Thus, the degree of end-state comfort satisfaction will be lower when the objects are physically connected, compared to when they are separate. Furthermore, based on previous research demonstrating that the relationship between end-state comfort and bimanual coupling constraints is influenced by object end-orientation, we expected lower end-state comfort satisfaction values when the objects are placed at different, compared to identical, end-orientations. The second purpose of the present study was to examine if the movement kinematics differed between conditions when participants manipulated two independent objects compared to the conditions when participants manipulated two connected objects. We hypothesized that that the central nervous system (CNS) would for control the forces encountered throughout the movement by constraining the limbs to act as a single unit (coordinative structure). Thus, it is expected that the hands would be more coupled when the objects are physically connected, compared to when the objects are independent. Additionally, based on previous bimanual coordination literature, we hypothesized that the hands would be more coupled when the objects are placed at different, compared to identical, end-orientations. Investigating how manipulating two physically-connected objects alters the initial grasp behavior as well as the kinematics of the movement will yield important insight into the motor planning and execution processes of a bimanual task where both hands must act in a cooperative manner.
Methods
Participants
Participants (n = 15 in each group) were randomly assigned to either the bimanual no-spring (mean age = 20.33, SD = 1.58, 9 men and 6 women), and bimanual spring (mean age = 20.00, SD = 1.41, 8 men and 7 women). In addition, to ensure that the end-state comfort effect was observed in this particular experimental set-up, we collected data from a group of participants (mean age = 20.67, SD = 2.45, n = 15, 8 men and 7 women) who performed the unimanual version of this task. All participants reported a right-hand preference as determined by the hand they use to write and throw a ball. Ethical approval for the study was obtained through the Purdue University Institutional Review Board.
Apparatus
Participants stood in front of a custom-built placement board (1.5 × 3.0 m) braced by two legs (Fig. 1a). The placing board was adjusted to shoulder height, and the center of the board was oriented so that it coincided with the midline of the participant. On each side of the board were four white target circles (10 cm in diameter). The target circles required that the objects be rotated either 0°, 90° internally, 180°, or 90° externally. Viewed from the participant’s perspective, these were: 12 o’clock for both hands, 3 o’clock for the left hand, and 9 o’clock for the right hand, 6 o’clock for both hands, and 9 o’clock for the left hand, and 3 o’clock for the right hand.

a Experimental set-up used for the grasping and placing task. On each side of the board were four white target circles (10 cm in diameter) that required the objects be rotated either 0° (12 o’clock), 90° internally (3 o’clock for the left hand and 9 o’clock for the right hand), 180° (6 o’clock for both hands), or 90° externally (9 o’clock for the left hand and 3 o’clock for the right hand). At the start of each trial, the objects were always placed so that the protrusions faced upwards. Participants could grasp the objects using either an b overhand or c underhand grip. d Objects used in the present task. The objects could either be separate, or connected by a spring (shown above). When the objects were connected, participants were required to produce between 6.2 and 12.5 N of force to complete the task. Illustration of the stimuli during: e identical object end-orientation trials, and f different object end-orientation trials. The stimuli were presented to the subject in blue at the start of each trial. After a variable warning period (1,500–2,500 ms), the image became green, and participants were instructed to grasp the objects and place them on the board in the appropriate object end-orientations
The manipulated object was a square wooden block (17.8 × 17.8 × 3.8 cm, 0.89 kg). The top center of each block had a 3.8-cm square protrusion. This protrusion was used to provide a landmark to the subject so they could properly orient the block during each trial. Because the protrusion was placed in the top center of the block, it did not create any rotational torque during the movement. The block had a handle affixed to the center of the main body that allowed for either an underhand or overhand grip (Fig. 1b, c). The block was placed on a small table (49.5 × 19.1 × 10.2 cm), 30.0 cm in front of the computer display and positioned so that the protrusion faced upwards. During the bimanual spring condition, the objects were connected by a spring (Fig. 1d). The loops at the end of the spring were attached to the back of the wooden blocks with a socket screw (5.1 cm in length, 4.8 mm shank diameter, 2.5 cm Bugler fastener head). This setup allowed each object to freely rotate 360°. The spring stiffness was 193 N/m, and required participants to produce approximately 10 N of force to complete the task.
A five-button serial response box (Psychology Software Tools, Pittsburgh, PA) was positioned directly underneath the table. The leftmost and rightmost response buttons (2.0 × 2.0 cm) were used to collect reaction time. Three-dimensional movement kinematics were recorded at 120 Hz using a six-camera VICON motion capture system. A reflective marker was placed on the protrusion of each object to obtain object motion. In addition, each trial was recorded using a Sony DCR-HC36 digital video camera (synchronized with a VICON motion capture system) that was placed 45º from the right horizontal plane of the participant. The digital video camera was used to record grasping postures.
Procedure
At the beginning of each trial, the participant placed both index fingers on the response buttons. An image demonstrating how the object(s) should be oriented on the placement board was displayed in blue on the computer monitor (Fig. 1e, f). After a random interval (ranging from 1,500 to 2,500 ms), the color of the image changed to green, signaling the participant to begin. The participant then grasped and moved the object(s) to the instructed end-orientation(s) on the placement board. Participants were informed to perform the task as quickly and accurately as possible, and move the left and right hands simultaneously.
The unimanual group performed the placement task with the left and right hands separately, the bimanual no-spring group performed the placement task with the two hands simultaneously, and the bimanual spring group performed the placement task with the two hands simultaneously while the blocks were connected with a spring. Thus, there were eight conditions in the unimanual group (4 end-orientations × 2 hands) and 16 conditions for the bimanual no-spring and bimanual spring groups. Participants performed five trials in each condition, with the presentation of object end-orientation randomized. This yielded a total of 40 trials for the unimanual group and 80 trials for the bimanual groups.
Data analysis
Kinematic data
The 3D coordinates of the reflective marker placed on the protrusion of the object were reconstructed and missing data (those with fewer than 10 frames) were interpolated using a cubic spline.Footnote 1 All kinematic variables were calculated using custom written MatLab programs (Mathworks, Version 7.0). The marker coordinates were low-pass filtered at a 5 Hz cut-off, using a second order Butterworth filter. For each trial, only the time period between when the object was grasped (movement onset) to the time the object contacted the board (movement offset) was further analyzed. Movement onset was determined as the time of the sample in which the resultant velocity of the object exceeded 10 mm/s. Movement offset was determined as the time of the sample in which the resultant velocity dropped and stayed below 3% of peak velocity. Object transport time was defined as the time period between movement onset and movement offset. Movement velocity was calculated from the sagittal plane (x- and z-axes) using a first-order central difference technique. All data were normalized to 100 data points and de-trended prior to calculation of interlimb coupling variables.
To investigate interlimb coupling, the velocity time series was first divided into an accelerative (period between movement onset and peak velocity) and decelerative phase (period from peak velocity to movement offset). The root-mean-squared (RMS) difference was then calculated between the hands over the accelerative and decelerative portions of the movement. For each trial, interlimb coupling at the end of the movement was determined by subtracting the time of left-hand contact from the time of right-hand contact. The individual trials were then averaged to provide a mean signed value for each condition. Positive values indicated that the left hand reached the object placement board first, whereas negative values indicated that the right hand reached the object placement board first. The absolute difference was also calculated to determine hand synchrony independent of hand lead or lag.
Grip data
The data were examined with respect to object end-orientation congruency (identical, different). During identical object end-orientation trials, the objects required the same degree of rotation, and were mirror symmetric, or identical with respect to global coordinates (independent of body position).Footnote 2 In contrast, during different object end-orientation trials, the end-orientations of the objects required different degrees of rotation.
Results
Unimanual versus bimanual
Grip behavior
In the present experiment, we first investigated bimanual grasp behavior compared to an appropriate unimanual control condition to ensure that the end-state comfort effect can be observed using this particular experimental set-up. To investigate differences between unimanual and bimanual end-state comfort, we directly compared the unimanual and bimanual no-spring data.Footnote 3 Chi-squared analysis on the factors group (unimanual, bimanual no-spring) and hand (left, right) revealed no significant differences, χ 2(9) = 5.42, P = 0.797, thus the data were collapsed to examine differences in grip behavior as function of group and object end-orientation.
Percentages of trials in which participants satisfied end-state comfort in different experimental conditions for the four object end-orientations are displayed in Table 1. For trials that required no rotation (0° rotation), both the unimanual and bimanual no-spring group selected grips that ensured a comfortable posture upon object placement. Specifically, participants in the unimanual group used an overhand grip in 89% of trials that required no rotation, compared to 73% for participants in the bimanual no-spring group. This pattern of results was similar for trials that required 90º external rotation, with participants in both groups adopting overhand grips in 100% of trials. In the 180º rotation trials, participants used an overhand grip in 30 and 29% of total trials for the unimanual and bimanual no-spring groups, respectively. The adoption of an overhand grip resulted in an awkward end posture; thus, the preference for underhand grip selection indicates end-state comfort satisfaction. In the 90º internal rotation conditions, participants overwhelmingly adopted underhand grips (99% for the unimanual group, 96.5% for the bimanual no-spring group), a grip choice that led to end-state comfort satisfaction.
Object transport time
Differences in object transport time were examined using a 2 (group; unimanual, bimanual no-spring) × 2 (hand; left, right) × 4 (object end-orientation; 0º, 90º internal rotation, 180º rotation, 90º external rotation) mixed-effects ANOVA.
A main effect of object end-orientation was observed, F(3,27) = 41.47, P < 0.001. Post hoc analysis revealed that movements requiring 0° rotation (993 ms) were significantly shorter than movements requiring 90° internal rotation (1,063 ms), 180° rotation (1,144 ms), and 90° external rotation (1,049 ms), (all Ps < 0.01). In addition, significant differences in object transport time were observed between the 90° internal rotation and 180° rotation conditions (P < 0.001), and the 180° rotation and 90° external rotation conditions (P < 0.001). A significant group by hand interaction was also observed, F(1,9) = 5.02, P < 0.05. Movements performed by the left hand (1,044 ms) yielded longer object transport times than the right hand (1,012 ms) for the unimanual group. In contrast, although object transport times were significantly longer for the bimanual no-spring group, the values were more similar between the two hands (left hand = 1,092 ms, right hand = 1,102 ms).
Effects of physical object coupling
Grip behavior
To examine differences in grip behavior as a function of physical object coupling the 16 possible end-orientation bimanual conditions were separated into two categories. The first category included the conditions where it was possible for the hands to (1) satisfy end-state comfort for one hand, (2) adopt identical initial grip postures, or (3) adopt identical initial grip postures and still satisfy end-state comfort. The second category included the conditions where it was only possible to (1) adopt identical initial grip postures or (2) satisfy end-state comfort for both hands. Within each of the categories, the main behavioral variable of interest was the proportion of trials where participants satisfied end-state comfort, adopted identical initial grips, or satisfied end-state comfort while also adopting identical initial grips.
To examine the effects of object coupling on grip behavior, chi-square analysis on the factors object end-orientation (0° rotation, 90° internal rotation, 180° rotation, 90° external rotation), group (bimanual no-spring, bimanual spring) and hand (left, right) was employed. The proportions of trials satisfying end-state comfort was similar across hand and group, χ 2(9) = 3.87, P = 0.920, indicating physically connecting two objects with a spring does not influence end-state comfort during a bimanual grasp and place task (see Table 1).
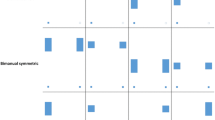
A secondary analysis was conducted to examine whether physically connecting the objects causes individuals to prioritize the bimanual coupling constraint at the expense of end-state comfort. To examine grip behavior during bimanual trials in which both constraints could be satisfied, a chi-squared analysis on the factors object end-orientation congruency (identical/different), group (bimanual no-spring/bimanual spring), and constraint (end-state comfort for one hand only/identical initial grips/end-state comfort and identical initial grips) was conducted. In situations in which participants could adopt identical initial grip postures and satisfy end-state comfort for both hands, the tendency to satisfy both constraints was similar between the bimanual no-spring and bimanual spring groups, χ 2(2) = 3.75, P < 0.15. Because there were no differences between groups, the data was collapsed to analyze differences in constraint satisfaction based on object end-orientation congruency, and analysis revealed a significant effect of object end-orientation congruency, χ 2(5) = 444.34, P < 0.01. As seen in Fig. 2, the proportion of trials in which both constraints were satisfied was significantly higher during trials with identical (94%) compared to different object end-orientations (66%). This decrease was affected by the proportion of trials satisfying end-state comfort for only one hand (30%).

Summary of bimanual conditions where initial grips could satisfy bimanual coupling and end-state comfort for both hands (gray bars), end-state comfort for one hand (black bars), or bimanual coupling (white bars)
During bimanual trials where initial grip postures could satisfy only one constraint, a chi-squared analysis was conducted on the factors object end-orientation congruency (identical/different), group (bimanual no-spring/bimanual spring), and constraint (identical initial grips/end-state comfort for both hands). In forced-choice situations (where composite grip postures could either satisfy end-state comfort for both hands, or identical initial grip postures), the proportion of trials satisfying either constraints were similar regardless of group, χ 2(3) = 5.73, P < 0.13. Because there were no group differences, the data were collapsed to analyze differences based on object end-orientation congruency. Chi-square contingency tables revealed that participants tend to satisfy end-state comfort for both hands rather than electing identical initial grips when the object end-orientations were identical, χ 2(1) = 4.63, P < 0.03. However, when the object end-orientations of the two hands differ, participants did not elect to satisfy either constraint in a reliable fashion, χ 2(1) = 2.99, P < 0.08, (Fig. 3).

Summary of bimanual conditions where initial grips could satisfy end-state comfort for both hands (black bars) or bimanual coupling (white bars)
Timing structure and kinematic analysis
Differences in the timing structure and kinematics were examined using separate 2 (group: bimanual no-spring, bimanual spring) × 2 (object end-orientation congruency: identical, different) mixed-effects ANOVA’s on the following variables: object transport time, peak velocity, and time-to-peak velocity.Footnote 4
The average values for timing and kinematic variables for the bimanual no-spring and bimanual spring groups for movements to identical and different object end-orientations are displayed in Table 2. Object transport time values for movements to identical object end-orientations (1,175 ms) were, on average, shorter than movements to different object end-orientations (1,209 ms), F(1,9) = 4.38, P < 0.01. However, object transport time values did not differ between the bimanual no-spring (1,097 ms) and bimanual spring group (1,298 ms), nor were any interaction effects observed. A significant interaction between group and object end-orientation congruency was observed for peak velocity, F(1,9) = 17.538, P < 0.01. The interaction between group and object end-orientation congruency for peak velocity was primarily driven by larger values for the bimanual no-spring group (1,603 mm/s) during movements to identical compared to different end-orientations (1,526 mm/s). Peak velocity values were similar for the bimanual spring group regardless of object end-orientation.
A group and object end-orientation congruency interaction was also observed for time-to-peak velocity, F(1,9) = 9.42, P < 0.05. Time-to-peak velocity values for the bimanual no-spring group were lower during movements to different end-orientations. In contrast, time-to-peak velocity values for the bimanual spring group increased during movements to different end-orientations.
Interlimb coupling
Interlimb coupling was examined using separate mixed-effects ANOVAs on the variables movement offset, and RMS difference of the accelerative portion (mm/s) and decelerative portion (mm/s) of the velocity profile, using group (bimanual no-spring, bimanual spring) as the between-subjects factor, and object end-orientation congruency (identical, different) as the within subjects factor.
Analysis revealed that absolute differences in movement offset were not significantly different between the bimanual no-spring (100 ms) and bimanual spring (121 ms) groups, F(1,18) = 2.21, P = 0.16. In contrast, movements to identical object end-orientations were more temporally coupled compared to movement to different object end-orientations (Table 2); F(1,18) = 15.46, P < 0.01. The signed difference results indicated a greater left-hand lead during the bimanual no-spring condition (28 ms) compared to the bimanual spring condition (5 ms), however, this difference was not significant, P = 0.16. Effects of congruency on signed differences were also not significant, P = 0.70. The relatively small absolute difference between left and right-hand movement offsets indicate that the two hands reached their target orientations at similar times. However, the signed difference results indicate that neither the left nor righthand led the other in a consistent fashion.
Analysis of the RMS velocity difference during the accelerative portion of the velocity profile revealed larger RMS values during different (186 mm/s) compared to identical end-orientations (146 mm/s), F(1,18) = 10.70, P < 0.001. In addition, a significant group × object end-orientation interaction was observed, F(1,18) = 4.77, P < 0.05. The RMS velocity difference values during movements to identical end-orientations were 157 mm/s for the no-spring and 138 mm/s for the spring groups. During movements to different end-orientations, the RMS values increased for both groups (respective means: no-spring = 182 mm/s, spring = 190 mm/s). However, this was more pronounced for the spring (RMS congruency values difference = 44 mm/s) relative to the no-spring group (RMS congruency values difference = 34 mm/s).
During the decelerative portion, RMS velocity difference values were larger for different (172 mm/s) than for identical object end-orientations (132 mm/s), F(1,18) = 22.47, P < 0.05. Furthermore, smaller RMS velocity difference values were observed for the bimanual no-spring group (mean = 131 mm/s) compared to the bimanual spring group (173 mm/s), F(1,18) = 7.08, P < 0.05, (Table 2). The interaction between group and object end-orientation was significant, F(1,18) = 6.95, P < 0.05. RMS values during movements to identical end-orientations was smaller for the no-spring (114 mm/s), compared to the spring (148 mm/s) group. When the objects were placed to different end-orientations, RMS increased for both groups. However, this difference was more pronounced for the spring (198 mm/s), compared to the no-spring group (148 mm/s).
Discussion
In this study, we investigated the relationship between end-state comfort and bimanual coupling when participants manipulated two connected objects compared to when they manipulated two independent objects. In general, the original hypothesis was not supported. Specifically, it was found that the relationship between the end-state comfort and bimanual coupling constraints was not influenced when participants manipulated two coupled objects. However, a decrease in interlimb coupling (as measured by absolute offset and RMS velocity difference during the decelerative portion of the movement) was observed when participants manipulated physically-connected objects. The RMS difference variable was calculated on the velocity profile in the sagittal plane of motion so the physical influence of the spring (in the frontal plane) would be removed. Thus, differences in interlimb represent the forward motion of the object. The observed decrease in interlimb coupling is somewhat counterintuitive because it was also originally hypothesized that the mechanical connection between the two objects would result in the hands being more coupled as they move the object toward the target.
This counterintuitive finding suggests that the CNS utilizes a different strategy to control and coordinate independent degrees of freedom when executing bimanual arm movements in which connected objects are manipulated, compared to when the objects are separate. Specifically, when manipulating two independent objects, the CNS may constrain the movements of the two arms to act as a single unit (also called a coordinative structure or muscle synergy), thereby reducing the number of independent degrees of freedom that need to be controlled (Easton 1972; Kelso et al. 1979; Turvey 1979). Coordinating the two hands as a single unit simplifies movement control, easing the performance of an attention demanding precision manual task. Although this mode of control is somewhat inflexible and limits the ability of the CNS to attenuate movement perturbations, it will not hinder performance when manipulating two independent objects because the movements of the hands do not physically influence each other. However, when the objects are physically connected, any transient movement in one arm will translate to and influence the movement of the other arm. Thus, uncoupling the two limbs allows the CNS to remain flexible and attenuate perturbations in one or some of the degrees of freedom using other degrees of freedom within the coordinative structure (Turvey 1991). Thus, more flexible coordinative structures are assembled by the CNS when the arms most act cooperatively to complete a goal directed task.
Functional compensations to perturbations have also been observed in speech (Abbs et al. 1984; Kelso et al. 1984; Shaiman 1989). Specifically, while speaking, compensatory movements are made by the lips and tongue when a perturbation is delivered to the jaw. This compensation ensures speech is correctly produced. Flexible coordinative structures have also been observed in leaning and reaching movements. Ma and Feldman (1995) observed two functional synergies during reaching movements that involved movement of the trunk. The first synergy (reaching synergy) controls the movement of the hand to the target. The second synergy (compensatory synergy) ensures that the degrees of freedom involved with the reaching movement (e.g., trunk and arm) are coordinated in such a way that the movements of the individual’s degrees of freedom do not influence the position of the endpoint. Taken together, it appears that these coordinative structures are tailored to the needs of the ongoing motor act, and are functional and effective in the sense that they allow for the intended goal to be successfully completed.
In the present study, a similar compensatory synergy may be causing the interlimb differences observed when the objects were connected. Specifically, when the objects are connected, a compensatory synergy is assembled that is comprised of the degrees of freedom from both hands, and ensures that the overall endpoint trajectory is not altered. This compensatory synergy ensures the overall endpoint trajectory is maintained despite small fluctuations between the arms. The present work builds upon the constraint dominance framework (van der Wel and Rosenbaum 2010) and proposes that grasping and placing tasks can be organized into an initial grasp component, and a transport component. The observed invariance in initial grip posture between conditions (independent versus connected objects) suggests that planning initial grasp postures is of paramount importance. Consequently, the observed interlimb differences between conditions suggest that the how the task is accomplished (i.e., kinematics) is subordinate. Specifically, arm movements are controlled in an online manner so that perturbations can be controlled and appropriate end-postures can be obtained.
In addition to effects of physical object coupling, we also examined whether initial grip behavior and kinematics are influenced by object end-orientation congruency. Consistent with our hypotheses, we observed longer object transport times, and lower interlimb coupling values when the objects were placed at different, compared to identical object end-orientations (regardless of whether the objects were physically connected or independent). In addition, participants adopted grips that allowed them to satisfy end-state comfort for both hands and adopt identical initial grips when the required object end-orientations were identical, and both bimanual coupling and end-state comfort constraints could be satisfied. However, when the end-orientations for the two objects were different, there was a decrease in the proportion of trials in which both constraints were satisfied. Thus, although it was possible for participants to adopt identical initial grips and satisfy end-state for both hands, participants often would only satisfy end-state comfort for one hand. During forced-choice conditions in which participants could either adopt identical initial grips or satisfy end-state comfort (but not both), participants overwhelmingly satisfied end-state comfort for both hands when the required end-orientations were identical. However, when the end-orientations were different, participants did not satisfy end-state comfort or bimanual spatial coupling in a reliable fashion. Thus, consistent with our hypotheses and the growing body of bimanual end-state comfort literature, these findings demonstrate that the ability to satisfy end-state comfort is lower when the objects are to be placed at different, compared to identical, end-orientations.
Although the importance of end-state comfort and bimanual coupling constraints was influenced by object end-orientation congruency, physically connecting the two objects did not alter the relationship between the two constraints. This finding was counter to our expectations that the end-state constraint would be subordinate to the bimanual coupling constraint during physically-coupled object manipulation. Essentially, in the spirit of the flexible constraint hierarchy framework of van der Wel and Rosenbaum (2010), it was expected that participants would reweight the end-state comfort and bimanual coupling constraints so that they could grasp the objects in a fashion that would allow them to better compensate for the perturbations associated with manipulating two physically-connected objects. The finding that physical connection between the two objects does not mediate the relationship between end-state comfort and bimanual coupling suggests that the physically-coupled object manipulation is not a constraint that the CNS considers when planning initial grasp postures (motor planning). In contrast, the manner in which the task is accomplished (motor execution) is modulated by physical object coupling. Taken together, these results reinforce the idea of a hierarchical organized CNS within which multiple flexible constraint hierarchies exist (Franz 2003; Franz and McCormick 2010).
It is possible that the inability of participants to satisfy both end-state comfort and bimanual coupling during incongruent object end-orientations trials results from proximal (e.g., handle end-orientation congruency, or movement rotation symmetry) rather than distal aspects of the intended action (object end-orientation congruency). While this is certainly plausible, there is a growing body of literature that clearly demonstrates the influence action goals have on bimanual performance (Kunde and Weigelt 2005; Kunde et al. 2009; Mechsner et al. 2001). For example, Kunde and Weigelt (2005) examined movement planning processes during a task in which participants were required to move two objects using either mirror-symmetrical or mirror-asymmetrical movements, and align them into either parallel or opposite orientations. They found that performance was strongly affected by the congruency of the intended object orientations but was essentially unaffected by movement symmetry. It was only when the movements themselves became the action goal did the motor-symmetry become apparent, demonstrating that bimanual performance is strongly determined by the actions goals rather than the muscles required to reach those goals. This finding supports the assumption that the inability to satisfy both end-state comfort and bimanual coupling is driven by object end-orientation congruency (action goals), rather than muscle activation congruency. However, due to the experimental design of the present study, we cannot dissociate the distal and proximal effects on the production of bimanual movements. Future research should examine how proximal and distal effects influence bimanual actions.
Lastly, no differences were observed in the initial grip behavior between the left or right hand. These findings contrast those of a recent research that demonstrated stronger end-state comfort satisfaction for the right hand in both left and right-handed individuals (Janssen et al. 2009, 2011). The main difference between the Janssen et al. (2009) study and the present study was the degree of precision needed to complete the task. Thus, it is possible that precision constraints might influence planning of initial grip postures. In the present study, participants placed the objects on a fitting board, whereas in the studies of Janssen et al. (2009, 2011) participants placed a CD casing into a box. The CD placing task required a higher level of precision at the end of the movement than placing an object on a fitting board. Additionally, unlike placing a CD, the participants did not receive any knowledge of results feedback regarding whether or not the block accurately contacted the target circles on the fitting board. Therefore, similar to results obtained during unimanual object manipulation (Rosenbaum et al. 1993, 1996; Short and Cauraugh 1999), it appears that precision constraints influence hand differences in end-state comfort during bimanual movements. Future work should examine this hypothesis directly by manipulating the degree of precision in a systematic fashion.
In summary, there were three main conclusions from this study. First, object end-orientation congruency altered both the relationship between end-state comfort and bimanual coupling (motor planning) and the degree of interlimb coupling (motor execution). Second, physically connecting the two objects did not alter the relationship between end-state comfort and bimanual coupling. It did, however, decrease the level of interlimb coupling during the execution of the task. Third, initial grip behavior was not influenced by hand dominance. Taken together, these findings suggest that the prioritization and relationship of the constraints that act on motor planning and execution are mediated by physical object coupling and object end-orientation congruency.
Notes
In no trials were there any gaps greater than this.
Analysis revealed no significant differences between egocentric and allocentric congruency, (χ 2(1) = 0.024, P = 0.878), thus the data were collapsed across congruency.
The comfort ratings were assessed using a separate pool of participants (n = 20, X = 24.79, SD = 3.21, 6 males and 14 females). A repeated measures ANOVA was conducted on the factors Initial grip (overhand, underhand), Hand (left hand, right hand), and Object end-orientation (0° rotation, 90° internal rotation, 180° rotation, 90° external rotation). Analysis revealed significant main effects of Initial grip [F(1,18) = 5.15, P = 0.04] and Object end orientation [F(1,18) = 5.15, P = 0.04], but not Hand [F(1,18) = 0.16, P = 0.70]. There was also a significant Initial grip × Object end-orientation interaction [F(3,54) = 39.57, P = 0.01]. Post hoc analyses revealed that mean comfort ratings were higher for the overhand grip compared to the underhand grip when no rotation [t(18) = 4.47, P < 0.01] and 90° external rotation [t(18) = 15.93, P < 0.01] was required. In contrast, when the movement required either 90° internal rotation or 180° rotation, participants rated underhand grips more comfortable than overhand grips [t(18) = −11.90, P < 0.01 and t(18) = −7.02, P < 0.01, respectively].
As with the grip data, we did not observe differences between egocentric and allocentric congruency for any of the timing and kinematic variables. Therefore, the egocentric and allocentric data were compressed to form the identical end-orientation condition.
References
Abbs JH, Gracco VL, Cole KJ (1984) Control of multimovement coordination: sensorimotor mechanisms in speech motor programming. J Mot Behav 16:195–232
Bootsma RJ, Marteniuk RG, Mackenzie CL, Zaal FTJM (1994) The speed-accuracy trade-off in manual prehension: effects of movement amplitude, object size and object width on kinematic characteristics. Exp Brain Res 98:535–541
Chieffi S, Gentilucci M (1993) Coordination between the transport and the grasp components during prehension movements. Exp Brain Res 94:471–477
Claxton LJ, Keen R, McCarty ME (2003) Evidence of motor planning in infant reaching behavior. Psychol Sci 14:354–356
Easton TA (1972) On the normal use of reflexes. Am Sci 60:591–599
Fischman MG, Stodden DF, Lehman DM (2003) The end-state comfort effect in bimanual grip selection. Res Q Exerc Sport 74:17–24
Franz EA (2003) Bimanual action representation: a window to human evolution. In: Johnston-Frey S (ed) Taking action: cognitive neuroscience perspectives on the problem of intentional acts. MIT Press, Cambridge, pp 259–288
Franz EA, McCormick R (2010) Conceptual unifying constraints override sensorimotor interference during anticipatory control of bimanual actions. Exp Brain Res 203:273–282
Franz EA, Zelaznik HN, McCabe G (1991) Spatial topological constraints in a bimanual task. Acta Psychol 77:137–151
Franz EA, Eliassen J, Ivry RB, Gazzaniga MS (1996) Dissociation of spatial and temporal coupling in the bimanual movements of callosotomy patients. Psychol Sci 7:306–310
Franz EA, Zelaznik HN, Swinnen SP, Walter CW (2001) Spatial conceptual influences on the coordination of bimanual actions: when a dual task becomes a single task. J Mot Behav 33:103–112
Hughes CML, Franz EA (2008) Goal-related planning constraints in bimanual grasping and placing of objects. Exp Brain Res 188:541–550
Janssen L, Beuting M, Meulenbroek RGJ, Steenbergen B (2009) Combined effects of planning and execution constraints on bimanual task performance. Exp Brain Res 192:61–73
Janssen L, Crajé C, Weigelt M, Steenbergen B (2010) Motor planning in bimanual object manipulation: two plans for two hands? Mot Control 14:240–254
Janssen L, Meulenbroek RGJ, Steenbergen B (2011) Behavioral evidence for left-hemisphere specialization of motor planning. Exp Brain Res 209:65–72
Jeannerod M (1984) The timing of natural prehension movements. J Mot Behav 16:235–254
Kelso JAS (1984) Phase transitions and critical behavior in human bimanual coordination. Am J Physiol Regul Integr Comp Physiol 18:645–668
Kelso JAS, Southard DL, Goodman D (1979) Coordination of 2-handed movements. J Exp Psychol Hum Percept Perform 5:229–238
Kelso JAS, Tuller B, Vatikiotis-Bateson E, Fowler CA (1984) Functionally specific articulatory cooperation following jaw perturbations during speech: evidence for coordinative structures. J Exp Psychol Hum Percept Perform 10:812–832
Kunde W, Weigelt M (2005) Goal congruency in bimanual object manipulation. J Exp Psychol Hum Percept Perform 31:145–156
Kunde W, Krauss H, Weigelt M (2009) Goal congruency without stimulus congruency in bimanual coordination. Psychol Res 73:34–42
Ma S, Feldman AG (1995) Two functionally different synergies during arm reaching movements involving the trunk. J Neurophysiol 73:2120–2122
Marteniuk RG, MacKenzie CL, Jeannerod M, Athenes S, Dugas C (1987) Constraints on human arm movement trajectories. Can J Psychol 41:365–378
Mechsner F, Kerzel D, Knoblich G, Prinz W (2001) Perceptual basis of bimanual coordination. Nature 414:69–73
Rosenbaum DA, Marchak F, Barnes HJ, Vaughan J, Slotta JD, Jorgensen MJ (1990) Constraints for action selection: overhand versus underhand grips. In: Jeannerod M (ed) Attention and performance XIII. Motor representation and control. Lawrence Erlbaum, Hillsdale, pp 211–265
Rosenbaum DA, Vaughan J, Jorgensen MJ, Barnes HJ, Stewart E (1993) Plans for object manipulation. In: Meyer DE, Kornblum S (eds) Attention and performance XIV: synergies in experimental psychology, artificial intelligence, and cognitive neuroscience. MIT Press, Cambridge, pp 803–820
Rosenbaum DA, van Heugten CM, Caldwell GE (1996) From cognition to biomechanics and back: the end-state comfort effect and the middle-is-faster effect. Acta Psychol 94:59–85
Shaiman S (1989) Kinematic and electromyographic responses to perturbation of the jaw. J Acoust Soc of Am 86:78–88
Short MW, Cauraugh JH (1999) Precision hypothesis and the endstate comfort effect. Acta Psychol 100:243–252
Turvey MT (1979) The thesis of efference-mediation of vision cannot be rationalized. Behav Brain Sci 2:81–83
Turvey MT (1991) Coordination. Am Psychol 45:938–953
Van der Wel R, Rosenbaum DA (2010) Bimanual grasping planning reflects changing rather than fixed constraint dominance. Exp Brain Res 205:351–362
Weigelt M (2007) Re-examining structural constraints on the initiation of bimanual movements: the role of starting locations, movement amplitude, and target locations. Hum Mov Sci 26:212–225
Weigelt M, Kunde W, Prinz W (2006) End-state comfort in bimanual object manipulation. Exp Psychol 53:143–148
Weigelt M, Rieger M, Mechsner F, Prinz W (2007) Target-related coupling in bimanual coupling in bimanual reaching movements. Psychol Res 71:438–447
Weir P, MacKenzie CL, Marteniuk RG, Cargoe SL, Frazer MB (1991) The effects of object weight on the kinematics of prehension. J Mot Behav 23:192–204
Author information
Authors and Affiliations
Corresponding author
Rights and permissions
About this article
Cite this article
Hughes, C.M.L., Haddad, J.M., Franz, E.A. et al. Physically coupling two objects in a bimanual task alters kinematics but not end-state comfort. Exp Brain Res 211, 219–229 (2011). https://doi.org/10.1007/s00221-011-2673-4
Received:
Accepted:
Published:
Issue Date:
DOI: https://doi.org/10.1007/s00221-011-2673-4